
基于3D打印技术的一种仿生机械狗的设计与制作
2021-12-04 08:20青晓雨貟欢乐
探索科学(学术版) 2021年12期
肖 颖 青晓雨 貟欢乐
航天工程大学士官学校 北京 102200
目前,大多数陆地上的交通工具进行运动的方式主要是电机驱动车轮或履带,这种方式的缺点是对路面状况的依赖度较高,在崎岖的路上难以通行。但是拥有腿部的动物却可以十分轻松的通过这些路段,因为它们的腿部的运动方式具有完全不同的原理。动物的自如行走,给科学家们带来启示,开始研究仿生学,从足式机器人入手,来模仿动物的行走方式。
现有的足式步行机器人的腿部机构分为单腿,双腿,三腿,四腿,六腿,八腿甚至还有更多,其中偶数腿占这些中的绝大多数,因为从直线运动来看的话,偶数的腿部更容易控制并产生有效的步态,而偶数腿中,四足机器人又比双足机器人具有更好地稳定性和承载能力,同时在结构和控制算法的复杂程度方面又优于六足、八足机器人,综合性能是最佳的。
本文设计了一种以四杆机构为支撑,设计多连杆机械机构,通过改变腿部设计参数确定腿部杆件运动轨迹,要求运动须平稳,有持续行走能力,不出现故障,将设计好的机构利用SolidWorks软件对多杆机构进行三维建模,仿真验证其运动有效性。确定尺寸参数、绘制图纸,通过3D打印技术加工完成各个零件,组装完成仿生机械狗。最后模拟各种复杂地形验证其有效性。
一、仿步态机构的设计
(一)方案的选择
经过多方论证和调研,决定采用四杆仿生机构。四足动物的腿部运动顺序为:开始起步时如果是右前足先向前迈步,对角线的左后足就会跟着向前走,接着是左前足向前走,然后对角线的右后足跟向向前,接着继续循环,完成行走的整个过程。设计时要求狗在行走时晃动不能过大,高度方向不能超过身体高度的8%,宽度方向变化量不能超过总宽度的5%。狗腿落地的时候机构能接近自然状态,以便于提高狗的承载能力。狗迈步的步距最好在狗身长的1/4左右,跨步高度要高,以提高越障能力。狗蹄在运动时形成的封闭曲线,要求在下面的那一段最好是直线,或接近直线。
(二)四杆仿步态机构设计
在设计仿生机构时,其足部轨迹曲线是首要考虑的重要条件,因为它会直接影响到仿生机构对地形的适应能力和行进时的稳定性。因此,要首先确定理想的足部轨迹特性。
理想足部轨迹曲线的要求如下:
1)由足部产生的轨迹曲线必须为一封闭且不相交叉的曲线,以避免产生无效的轨迹曲线。
2)足部轨迹曲线中的支撑段曲线应为直线段,以避免机构重心的上下起伏。
3)足部轨迹曲线中的跨越段曲线的垂直高度越高越好,以利于提高机构跨越障碍的能力。
4)根据真实狗的步态动作,四杆机构机械狗前腿的足部轨迹线与后腿的足部轨迹线应是不相同的;前腿的抬腿动作要较高些。
狗在换腿时,其后腿与前腿的足部会相当接近,为防止干涉,要求四杆仿生机构的前、后腿机构的足部轨迹曲线的右极点和左极点必须要接近步行机构的中心点位置,为了模拟真狗的运动状态,根据膝关节锁定原理限制四杆仿生机构的前、后腿机构的小腿杆件相对于大腿杆件的运动范围,一般最大不可超过180°,小腿杆件相对于大腿杆件的运动范围限制在89°—179°。前后腿机构的性能要求如下表所示。

表2.1 前腿机构的性能要求
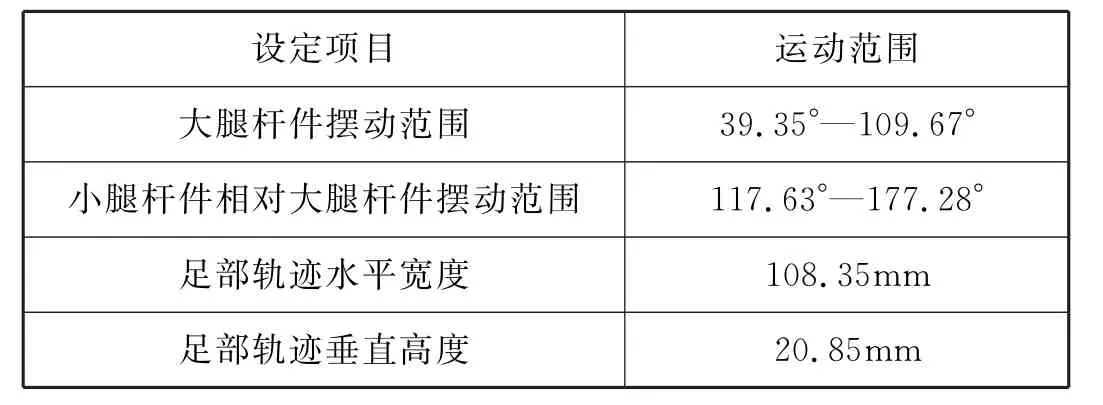
表2.2 后腿机构的性能要求
四杆仿步态机构能模拟真实狗运动时的步态动作,设计时要限制四杆仿生机构的前、后腿机构的运动范围。因为运动范围过大,会使抬腿动作过于夸张不符合真狗的动作;反之,若运动范围过小,会使步行机构没有真狗的抬腿动作,而无法跨越障碍。因此,首先确定大腿与机架之间的运动范围一般为45°—135°
在设计具有急回运动特性的四杆机构时,通常按实际需要先给定行程速度变化系数K的数值,然后根据机构在极限位置的几何关系,结合有关辅助条件来确定机构运动简图的尺寸参数。确定各杆件的长度尺寸如下表所示:

表2.3 四杆仿步态机构尺寸参数
(三)传动机构设计
四杆仿生机构驱动采用一个直流电机驱动,通过二级减速器传递动力,带动四个曲柄旋转,从而确定四只腿按严格的相位关系运转,控制每条腿的运动顺序及运动轨迹。此设计结构简单,便于实现四只腿间动作的协调。

图2.2 传动机构内部布局图
通过数次计算,最终得出各个齿轮构件的详细参数,如表2.4:

表2.4 传动机构零件的尺寸参数
电动机的输出转速为300-800r/min之间,经过齿轮轮系组成2级变速箱,对传输速度进行减速处理,使传动轴的转速为20—50r/min之间,齿轮的传动比为16:1,使用3组斜齿轮改变动力传输方向,齿轮齿数分别为10、20、40。最终采用转速较慢但转矩较大的电动机,确定使用电动机的输出转速为=560r/min的电动机。如下图所示:

图2.3 所用电机实物图
二、3D打印完成项目制作
(一)3D打印技术
3D打印,又称增材制造,是快速成型技术的一种,其原理是先通过计算机建模或扫描原型,得到数字化模型,然后将三维模型分解成多层的二维截面数据,再通过软件与数控系统将材料进行逐层打印,最终形成三维实体。其中FDM是将丝状的热塑性材料加热熔融,在计算机的控制下,根据三维模型信息,将材料选择性地涂敷在工作台上,快速冷却后形成一层截面;一层成型完成后,机器工作台下降一个高度再涂覆下一层,直至形成整个三维造型。FDM工艺能兼容多种类型的材料且更换方便,维护成本低,可以快速成型厚度较小的实体。
FDM使用的热塑性高分子材料[5–6]主要有丙烯腈 –丁二烯 – 苯乙烯塑料(ABS)、聚乳酸(PLA)、聚碳酸脂(PC)、尼龙(PA)、聚醚醚酮(PEEK)等。其中ABS(Acrylonitrile Butadiene Styrene,ABS)是丙烯腈-丁二烯-苯乙烯共聚物,是FDM第二大应用量的耗材,是一种具有较高的强韧结合性、易于加工成型的热塑型高分子材料结构,在模型设计领域得到广泛的应用。本文采用的是ABS树脂材料打印。
(二)模型设计
设计初期,腿部杆件采用圆柱形设计,利用3D打印技术打印腿部杆件。在经过几次试验后,发现圆柱形腿部杆件在腿部运动中,灵活度较低,不能满足整个腿部 机构的运动轨迹,达不到理想的效果。随后,我们针对这一问题,经过深入细致的研究,最终决定,将腿部杆件改为扁平状,能够有效克服因灵活度较低带来的一系列问题,保证了整个腿部机构的灵活性。
设计过程中,由于足部底面与地面的接触面积有限,造成了在行走过程中,整个机构出现晃动现象,无法保证行走过程的整个机构的稳定性。决定对杆件厚度进行加固,克服了因杆件自身重量较轻存在的问题。然后,从人体关节的灵活度出发,决定给各个杆件加上类似于人类鞋子的足部零件,改进后的足部就像人体关节一样,可进行360度旋转,有效的增加了足部与地面的接触面积,提高了足部与地面的摩擦力,保证了腿部行走机构的稳定性和运动轨迹。

图3.1 腿部杆件与足部零件设计图纸
三、结束语
本设计基于3D打印技术完成了四足仿生机器人样机中腿部机构和身体的制作,可实现腿部机构的稳定运动,能够满足在不规则路面、沼泽、沙地、跨越障碍物等崎岖复杂的路面上稳定行走,具有较好的稳定性和承载能力。主要是针对特殊环境和特殊任务,比如,在执行装备搬运、故障排除、抢险救灾、情况侦查、翻越障碍等任务。

图3.2 3D打印的内部零件与外壳
猜你喜欢
上海建材(2022年3期)2022-11-04
现代仪器与医疗(2022年4期)2022-10-08
建材发展导向(2020年4期)2020-03-25
煤(2019年12期)2019-12-12
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
课外生活(小学1-3年级)(2017年4期)2017-05-22
科技创新与品牌(2016年8期)2016-09-29
小学生·多元智能大王(2014年1期)2014-03-17
意林(2007年5期)2007-05-14
