
一类带时滞和收获率的捕食者-食饵系统的稳定性
2021-12-07 09:26吴耀冲温洁嫦
佛山科学技术学院学报(自然科学版) 2021年6期
吴耀冲,温洁嫦*
(广东工业大学 应用数学学院,广东 广州 510520)
其中,u,v 分别表示食饵和捕食者种群密度;r,k1,k2分别为食饵的内禀增长率、环境对食饵种群的容纳量和食饵对捕食行为的恐惧系数;c1,c2分别为捕食者对食饵的捕获率和能量的转化率;ø(u,v)=为比例依赖型功能反应函数,且m 为半饱和系数;d,h 分别为捕食者的死亡率和收获率;τ为食饵种群孕育后代产生的时滞。考虑到现实意义,参数r,k1,k2,c1,c2,m,d,h,τ 均为非负数。
1 系统平衡点存在条件和稳定性分析
系统(1)存在一个边界平衡点E1(k1,0),和当c2>d+h 时存在一个正平衡点E2(u*,v*),其中
1.1 τ=0 时平衡点的稳定性
定理1当c2<d+h 时,边界平衡点E1局部渐近稳定;当c2>d+h 时,边界平衡点E1不稳定。
证明系统(1)在E1处的Jacobi 矩阵为

定理2当时,E2是局部渐近稳定的平衡点。
证明系统(1)在E2处的Jocobi 矩阵为
伴随着移动互联网技术的蓬勃发展,移动支付正在改变支付结算方式,为电网企业物资合同结算管理效率提升提供了新思路[4]。

其中

1.2 τ≠0 时平衡点的稳定性
对系统(1)在E2处作线性化处理,得


其中,T=-(a11+a22),G1=a11a22,G2=(-a12)。
定理3当τ≠0 时,c2<d+h 时,E1局部渐近稳定。
证明在E1处,a11=-r,a12=-c1,K21=a21=0,a22=c2-d-h,当c2<d+h 时,由Routh-Hurwitz 判据得多项式H(λ)所有特征根都有负实部,故此时E1局部渐近稳定。
令λ=iw 是方程(14)的一个根,对于τ>0,有

分离实部和虚部,得

设W=w2,有

定理4由于(a11+a22)2-2G1>0,根据Routh-Hurwitz 判据可知,当G12>Q2时,方程(19)所有根都有负实部,故此时方程(18)的根没有穿过纯虚数轴,则平衡点E2局部渐近稳定。
当G12<Q2时,方程(16)、(17)有一正根,即

此时

这表明当τ=τ0时,方程(14)有一对纯虚数根λ=±iw0;当τ<τ0时,平衡点E2局部渐近稳定。其中

下面验证横截条件[14],即

由等式(14),得

所以当τ=τ0时,有

故横截条件满足。所以有以下结论:
定理5当G12>Q2时,对于所有τ>0,平衡点E2局部渐近稳定;当G12<Q2成立,则τ<τ0时,平衡点E2局部渐近稳定,当τ>τ0时,平衡点E2不稳定,当τ=τ0时,系统在E2附近发生Hopf 分支。
2 数值模拟
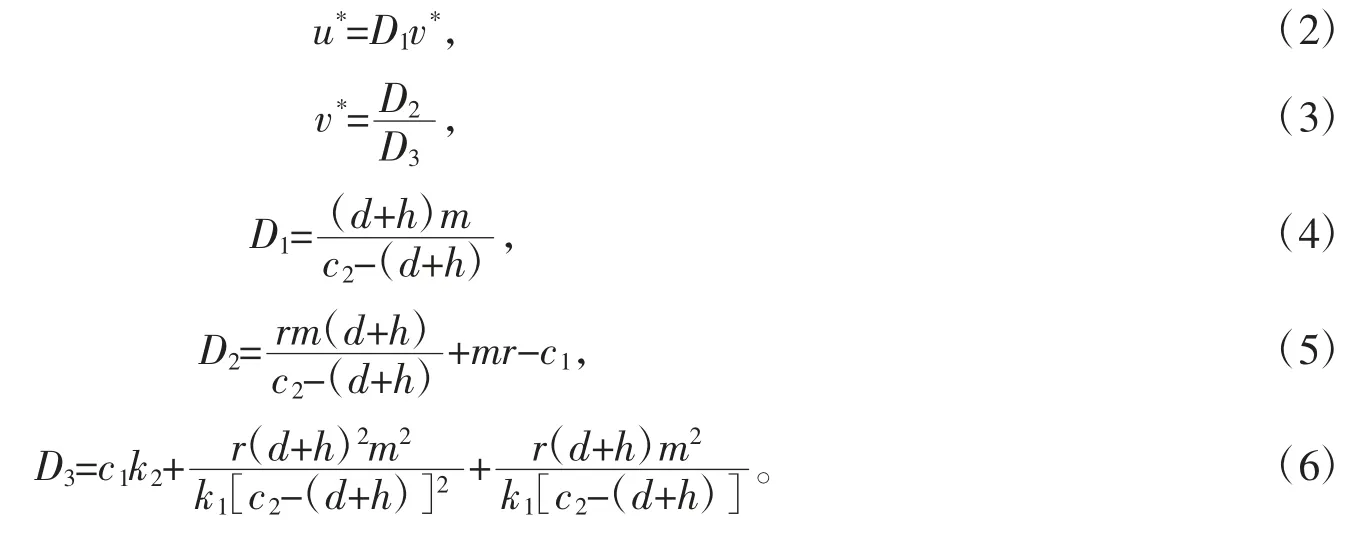
当τ=0 时,即不考虑食饵种群孕育后代产生的时滞对系统的影响。取r=0.5,k1=11,c1=0.2,c2=0.07,m=0.1,d=0.03,h=0.05,k2=0.2,此时c2<d+h 成立,从图1、2 可以看出,此时系统(1)中的捕食者和食饵种群数量不随时间变化而变化,但捕食者趋于灭绝,仅食饵种群长久存活下去。取r=0.5,k1=11,k2=3,c1=0.08,c2=0.05,m=1,d=0.03,h=0.01,满足,从图3、4 可以看出,此时E2为稳定的焦点,且系统中的两种群都随着时间的流逝而长久存活下去并未灭绝。
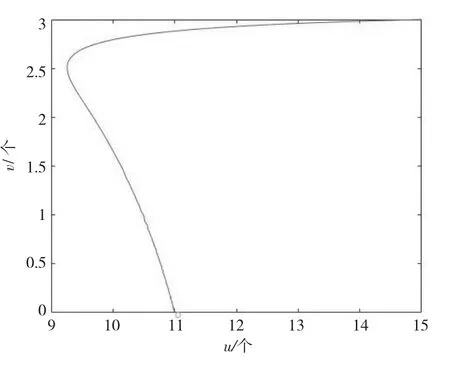
图1 E1 附近的轨线
图2 E1 稳定时两种群密度

图3 E2 附近的轨线

图4 E2 为稳定焦点时两种群密度
考虑食饵种群孕育后代产生的时滞对系统的影响,此时τ≠0。取τ=4,r=0.5,k1=11,c1=0.2,c2=0.07,m=0.1,d=0.03,h=0.05,k2=0.2,满足定理3 的条件,此时系统中的捕食者灭绝,食饵种群长久存活(如图5 所示)。取h=0.02,初始条件及其它参数相同情况下,从图6 可以发现,系统变得不稳定,这说明在满足一定条件下,恰当的人为干预有利于系统(1)两物种的稳定。
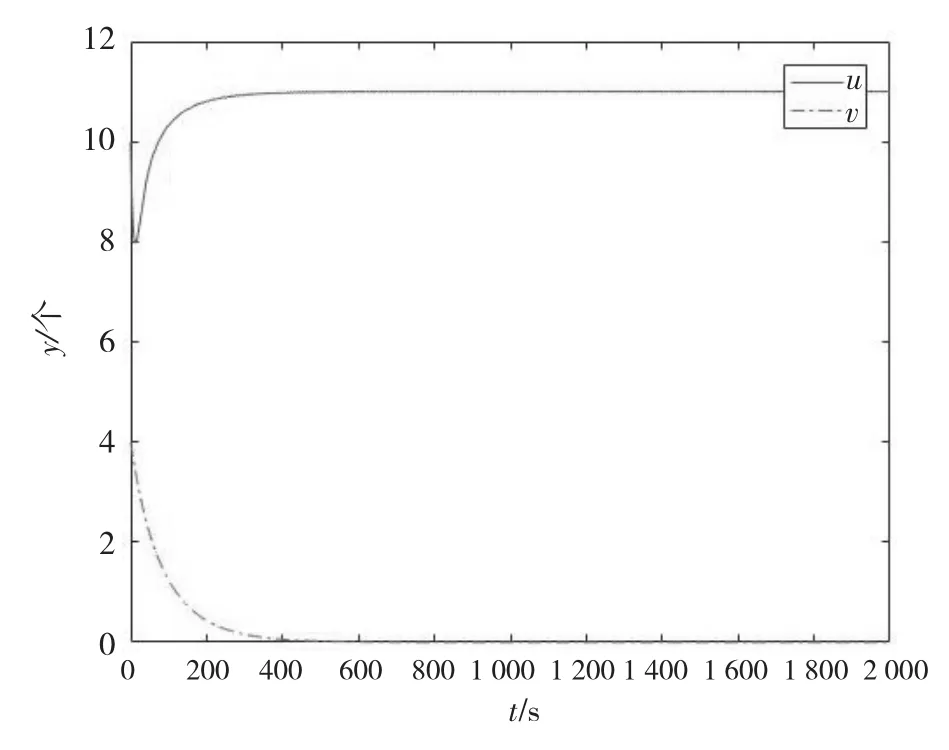
图5 h=0.05 两种群密度
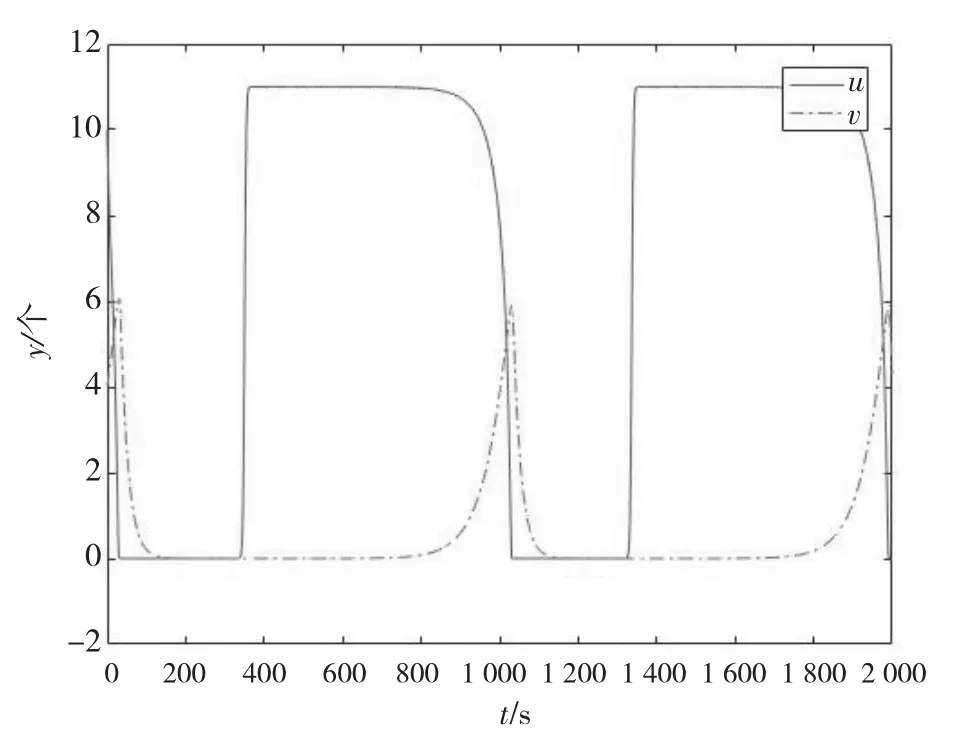
图6 h=0.02 两种群密度
取r=0.8,k1=11,c1=0.2,c2=0.1,m=0.4,d=0.03,h=0.05,k2=0.5,τ=10,此时系统(1)的捕食者与食饵种群都没有灭绝并且稳定存活(如图7 所示)。取r=0.5,k1=11,c1=0.08,m=0.8,c2=0.05,d=0.02,h=0.001,k2=2,τ=0.02,此时系统(1)在E2附近发生Hopf 分支(如图8 所示),捕食者和食饵的种群密度呈周期性变化,随着时间的流逝一直稳定存在且都没有灭绝。

图7 τ=10时两种群密度

图8 τ=0.02时两种群密度
3 结论
考虑了食饵种群孕育后代在时间上产生的延迟对系统的影响,从理论上证明了系统(1)的平衡点存在条件,利用Routh-Hurwitz 判据证明了两平衡点局部渐近稳定的成立条件,通过实验分析发现:1)时滞不能破坏E1的局部渐近稳定性质;2)在满足一定条件下,恰当的人为干预有利于系统(1)两物种的稳定;3)当τ=τ0时,系统在正平衡点附近发生Hopf 分支产生周期振荡。
猜你喜欢
中北大学学报(自然科学版)(2022年4期)2022-09-23
吉首大学学报(自然科学版)(2022年1期)2022-08-10
闽南师范大学学报(自然科学版)(2021年3期)2021-10-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
百科探秘·海底世界(2020年11期)2020-12-31
北京航空航天大学学报(2020年10期)2020-11-14
北方工业大学学报(2019年5期)2019-03-30
动漫星空(兴趣英语)(2018年4期)2018-10-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
中外文摘(2016年13期)2016-08-29
