行星齿轮传动系统发展及关键技术研究进展
2021-12-30 01:22张旭东杨林杰曹延军王敬元吴鲁纪
化工机械 2021年6期
张旭东 杨林杰 曹延军 王敬元 吴鲁纪
(郑州机械研究所有限公司)
随着人类社会的不断发展和科技水平的不断进步,我国的机械工业也逐渐向高端装备制造发展。2020年初的新冠肺炎疫情不仅给全世界经济社会正常运行产生了重大影响,还给机械工业发展带来了前所未有的冲击,传统机械工业面临着巨大的下行压力,这也进一步促进了我国机械工业向高端化和智能化迈进的决心。
齿轮传动系统作为机械工业中最常用且最核心的传动形式,直接影响我国机械工业的发展水平[1]。在“中国制造2025”战略规划中也明确指出要加快发展高精度传动和驱动装置、精密减速器等智能模块和关键零部件领域的创新能力。行星齿轮传动系统具有传动比大、功率密度高、承载能力强及传动效率高等诸多优点,可以作为许多重要设备的关键传动环节,被广泛应用于风力发电、航空航天、机器人、车辆、船舶、冶金、化工、矿山及起重运输等诸多领域中[2]。但由于行星齿轮传动系统比定轴齿轮传动系统结构复杂,且运行环境较为恶劣,相关部件易出现不均载、裂纹、凹坑、磨损或折断等问题,严重影响设备的安全稳定运行[3]。因此,开发高效行星齿轮传动系统设计新方法,探索行星齿轮传动系统故障精准诊断技术,不仅能为工业化应用储备产品和技术基础,还能进一步推动我国机械工业的发展。
笔者对行星齿轮传动系统动力学研究、均载特性研究和故障诊断方法的国内外研究现状与进展进行了综述和分析,总结了现阶段的研究成果和存在的问题,并讨论了潜在的解决问题的途径。
1 行星齿轮传动系统动力学特性
行星齿轮传动系统属于复合齿轮传动系统,由中心轮、多个行星轮、内齿圈及行星架等组成。图1为典型的行星齿轮传动系统。在工作时,内齿圈固定不动,中心轮绕自身中心轴转动,行星轮不仅绕各自中心轴自传,还绕中心轮中心轴公转,同时还与中心轮和内齿圈保持啮合状态。可以看出,行星齿轮传动系统是一套较为复杂的耦合转子系统,属于过约束传动,因此对该系统进行动力学特性分析,实现动态设计成为必然发展趋势。
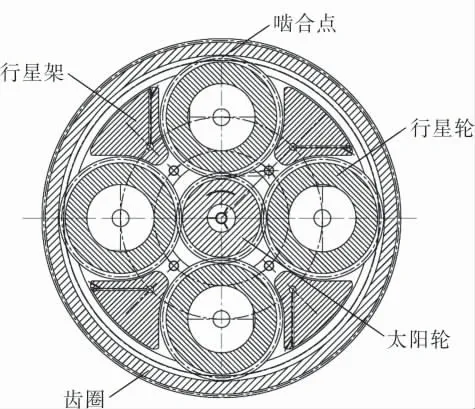
图1 典型行星齿轮传动系统示意图
1.1 动力学模型
动力学是研究运动与物体间相互作用的内在联系,通过能量守恒定律、牛顿第二定律、达朗贝尔原理、汉密尔顿定理及拉格朗日方程等建立数学模型,从而预测行星齿轮系统固有属性的一门学科。
研究行星齿轮系统动力学特性首先要建立系统的动力学模型,行星齿轮系统早期关于行星齿轮传动系统动力学模型的建立多为线性动力学模型。20世纪90年代以来,随着计算机技术的不断发展,非线性动力学模型逐渐成为研究热点,非线性动力学模型可以分为集中参数模型和有限元模型两种。
1.1.1 集中参数模型
集中参数模型是指将系统的各运动构件简化为集中质量的质点,并假设各质点之间以及质点与基础之间的连接为类似弹簧连接的弹性阻尼连接。这样整个系统的运动就可以简化为叠加了刚性运动和弹性形变的过程,由此可以建立系统的运动微分方程组。根据模型建立时质点自由度的选择,可以将集中参数模型分为纯扭转动力学模型和平移-扭转耦合动力学模型。
纯扭转动力学模型只考虑各个构件的扭转运动,模型相对简单,但在计算传动系统的固有频率时,与复杂的平移-扭转耦合动力学模型的计算结果相差很小[4],因此常被用于获得传动系统的固有频率。Shen Z X等通过无载静态传动误差和时变啮合刚度将齿面磨损纳入动力学模型,提出一种考虑齿面磨损的行星齿轮组纯扭振动力学模型,发现该模型能够很好地反映出齿面磨损对动力学特性的影响[5]。郑钰馨等建立了行星齿轮减速器的纯扭转动力学模型,求解系统在无阻尼条件下的固有频率和模态振型,发现转动惯量参数比刚度参数对系统固有频率的影响更明显,并通过实验验证了理论结果的准确性[6]。
平移-扭转耦合动力学模型同时考虑了构件的扭转自由度和平移自由度,利用该模型可以获得更为精确的系统动力学特征。对于直齿行星齿轮传动系统主要考虑它在x、y向的平移自由度,对于斜齿行星齿轮传动系统还需要考虑z向的平移自由度。Zhang D L等采用集中参数法建立了行星轮系的平移-扭转动力学模型,分析共轴式直升机主减速器的封闭式差动轮系的固有频率和振型特性,发现行星轮系的所有振动模态可分为旋转模态、平动模态、阶梯行星模态和行星模态,并且行星模态和阶梯行星模态对应的自然频率的大小不受行星数量的影响[7]。冷晓鲁等建立了两级行星齿轮传动系统的平移-扭转耦合模型,并引入时变啮合刚度、齿侧间隙及啮合误差等非线性因素,得到两级行星系统的混沌频率、进入混沌的途径和齿侧间隙对两级行星轮系非线性特性的影响[8]。
1.1.2 有限元模型
集中参数模型整体而言建模过程简单便于求解,并且其准确性也已经被大量学者通过理论和实验进行了验证。然而,部分学者仍然认为集中参数模型与实际情况相差较大,无法模拟出系统的真实动力学状态,而有限元法作为一种强有力的数值计算方法得到了学者们的深入研究。Parker R G等在2000年首次建立行星齿轮机构的有限元模型,并基于该模型分析了系统的动力学特性,发现采用有限元模型得到的系统固有频率和振动模态与采用集中参数模型得到的结果一致[9]。朱才朝等建立齿轮-传动轴-箱体系统耦合非线性动力学模型,研究高速重载行星齿轮传动系统在内部激励作用下的动态特性,为风电齿轮箱系统动态特性优化提供了理论依据[10]。Liu J等为了解行星齿轮组的动态特性与局部故障尺寸之间的关系,建立行星齿轮组的动态有限元模型,讨论转速、力矩和故障宽度对行星齿轮组动态特性的影响,并将仿真结果与采用已有方法所得的结果进行比较,验证了有限元模型的正确性[11]。
1.2 动力学模型求解方法
求解动力学模型的方法主要有数值法和解析法两种。数值法求解精度较高,对运动微分方程组的阶数和自由度数量没有限制。目前常用的数值法有Runge-Kutta法、变步长Gill积分法和Newmark积分法。
1.2.1 Runge-Kutta法
Runge-Kutta法属于单步积分,首先在积分区间预先求几个点的斜率,然后通过加权平均作为下个点的依据。Xiang L等采用Runge-Kutta数值积分方法,对所建立的非线性动力学模型进行求解,分析相关系统的动力特性,发现啮合频率随外界激励的变化会使系统的状态发生变化,并且在低激励频率和高激励频率下进入混沌的运动和路径是不同的[12]。Ren F等采用Runge-Kutta算法计算了人字形行星齿轮系统的动态响应,得到了制造误差、部件浮动位移和不同浮动形式之间的关系,并发现制造误差和部件浮动对系统的动态浮动特性有显著影响[13]。
1.2.2 变步长Gill积分法
变步长Gill积分法是对经典四阶Runge-Kutta法的改进算法,具有可以减小计算舍入误差、提高计算精度等优点。Li S等用变步长Gill积分法求解了多级行星轮系非线性时变动力学模型,发现多级行星齿轮系统由于轮齿侧隙和时变啮合刚度的耦合,具有不同的非线性动力学行为,并且随着阻尼系数的增大,系统的动力学行为逐渐向稳定的周期运动过渡,这说明高阻尼系数可以抑制非周期运动,从而提高系统的动态响应[14]。向玲等采用变步长Gill积分法对风电齿轮箱两级行星轮系传动系统模型进行了求解,发现随着激励频率的增大,系统在混沌运动、拟周期运动和倍周期运动之间切换、变化,并且在保证系统传动效率的前提下适当提高系统的啮合阻尼比,可以明显弱化和抑制系统的混沌运动,减小振动幅度[15]。
1.2.3 Newmark积分法
Newmar积分法属于逐步积分法,常用于求解非线性系统和瞬态激励响应。Ahmed H等采用Newmark积分法求解考虑了齿间接触的非线性和时变载荷条件的行星齿轮集中参数模型,并通过实验台验证发现数值计算结果与行星齿轮实验台的结果一致[16]。Liu Z X等用Newmark积分法求解径向滑动轴承行星齿轮系统的集中参数模型,分析了系统在不同转速下的响应,发现在低转速下,重力效应起主导作用,重力效应引起了行星支承力的波动和行星轨道的扩大[17]。王成龙等采用有限元方法建立了行星齿轮传动系统柔性齿圈结构动力学分析模型,然后采用Newmark逐步积分法,计算不同载荷下内齿圈齿根动应力,发现行星轮啮合位置远离内齿圈支撑位时,啮合位置应力显著增大,齿槽结构对齿圈齿根应力影响显著[18]。
学者们对于行星齿轮传动系统的动力学特性开展了大量有意义的研究,但目前仍以简单的单级或两级传动作为主要研究对象。然而,在实际应用中多级行星齿轮传动或由行星齿轮组成的组合传动较多,这些传动的动力学表现较为复杂,如何建立适用的动力学模型,并选择合适的求解方法获悉相关动力学特性,需要深入研究。
2 行星齿轮传动系统均载特性
为保证行星齿轮传动系统的高效、安全和稳定运行,应尽可能保证中心轮与各行星轮啮合力相等,即行星轮间均载。但由于不可避免的制造安装误差、工作环境温度变化、部件磨损及弹性形变等诸多因素,导致中心轮与行星轮的啮合作用力发生变化,造成啮合作用力不均等现象,进而造成行星齿轮传动系统工作异常,严重的甚至造成生产事故。因此,提高行星齿轮传动系统的均载特性,不仅能提高设备的运行可靠性,还能延长设备的使用寿命。目前,针对行星齿轮传动系统均载特性的研究主要集中在静态和动态两方面,常用的分析方法主要有数值计算法、虚拟样机仿真法和实验法。
行星齿轮传动系统均载特性的研究最早可追溯至20世纪80年代,德国学者Jarchow等对全部构件的浮动支承进行实际测量,并比较了各种不同均载机构的均载系数[19]。随后Hayashi T等提出了一种行星齿轮均载性能测量方法,并发现实际行星齿轮的动态载荷分配情况与静态情况下的估计值有较大差异[20]。日高照晃等研究静态条件下行星齿轮中各种误差与载荷分配的关系,认为圆周方向的装配误差比行星架在半径方向的误差对载荷分配带来的不良影响更大[21]。Kahraman A首次对由于制作安装误差造成的行星传动齿轮偏差进行分类,得到不同偏差条件下均载系数与输入扭矩的关系,并采用动载系数、动态均载系数和静态均载系数描述均载效果,建立了动力学方法与静力学方法分析均载性能的联系[22]。Bodas A等分别采用二维有限元-接触模型和三维有限元-接触模型研究不同偏差与均载系数之间的关系,发现了偏差对均载系数的影响规律,并对结果进行了实验验证[23~25]。然而,由于制作安装误差随机性强,使得有限元-接触模型计算量过大,Ligata H等提出一种离散型模型,导出均载系数计算公式,通过有限元模型和实验验证发现导出的公式具有较好的准确性[26]。
随着相关研究的不断深入,关于行星齿轮传动系统的均载性能研究也逐渐由静态均载性能理论分析逐步向动态均载性能分析侧重。目前普遍认为时变啮合刚度、齿间间隙及齿轮误差等引起的动载荷均会影响行星齿轮传动系统的均载性能。Kim JG等实验分析了提高行星齿轮箱转矩和改变其旋转方向对行星齿轮间动态载荷分配的影响,发现当行星齿轮数为偶数时,三对行星齿轮中,一对行星齿轮比另两对行星齿轮表现出更高的载荷分担,并且增加行星齿轮箱的扭矩可以提高啮合载荷系数[27]。Xu X Y等研究了支承刚度、齿轮位置误差及外部输入载荷等因素对多浮体行星齿轮系统动态载荷分配的影响,发现中心齿轮和行星齿轮同时处于多浮动状态时,系统的载荷分担条件最佳,并且在行星齿轮位置误差保持不变的情况下,降低行星齿轮柔性销刚度或增加外部输入载荷可以有效改善载荷分配[28]。Zhang J等利用遗传算法结合浮动行星齿轮组的二维简化模型,从内部激励因素和外部激励因素出发,对行星齿轮减速器动态均载性能进行研究,并推导了平均负荷系数的计算公式,通过对行星齿轮组动态响应的数值计算,确定了影响减速器性能的几个设计参数[29]。
诸多学者研究了各种因素对机构静态和动态均载特性的影响,并提出许多有价值的数学模型。但计算均载系数的方法均比较繁琐,需要求解复杂的静态或动态方程组,显著增加了行星齿轮传动系统的设计时间。因此,研究简单快捷且精度高的行星齿轮均载系数算法非常必要。此外,目前关于行星齿轮传动系统均载特性的影响因素研究多集中在制造安装误差和弹性形变方面,而对于温度影响和部件磨损造成的均载性能变化的研究较少,相关研究有待进一步开展。
3 行星齿轮传动系统故障诊断
行星齿轮传动系统虽然具有诸多优点,广泛应用于各种领域,但由于其内部结构和受力情况复杂,且长期处于低速、高载荷和工况变动较大的恶劣应用环境,齿轮、轴承等系统关键部件易出现裂纹、凹坑、磨损或折断等问题,无法保证设备的安全稳定运行。因此,对行星齿轮传动系统进行状态监测,实施故障诊断至关重要。随着科技的不断发展,关于行星齿轮传动系统故障诊断的方法层出不穷,目前主要有动力学诊断、信号处理诊断及智能诊断等。
3.1 动力学诊断
行星齿轮传动系统的动力学诊断主要是通过建立模型获得故障响应仿真,进而根据实际信号验证,揭示出齿轮的损伤特性。Li G Y等为研究行星齿轮架板裂纹对行星轮系动态特性的影响,考虑时变啮合刚度、齿隙及粘滞阻尼等非线性因素,建立了行星齿轮传动系统的动力学模型,发现所建立的动力学模型在预测行星轮系动态特性方面具有良好的精度,并且从模型预测中提取的故障特征清楚地揭示行星齿轮架裂纹的振动特征与裂纹状态(长度和位置)之间的对应关系[30]。向玲等通过建立故障行星齿轮系统的动力学模型,获得故障行星齿轮系统的接触力变化规律,发现断齿故障的行星齿轮系统的接触力在时域中含有明显的周期性冲击,认为通过对故障行星齿轮系统动力学研究,可为行星齿轮系统故障诊断提供较为可靠的参考和依据[31]。杨之含等针对单级行星齿轮的裂纹故障问题,采用集中参数法建立了平移-扭转耦合动力学模型,分析不同裂纹程度和不同行星轮故障数量下系统的响应特性,发现当单个行星轮发生裂纹故障时,二倍频谱能量占比逐渐增大到97%,当行星轮故障数量增大时,频谱中二倍频能量占比逐渐减小到64%[32]。
动力学诊断是从早期正常情况下的行星齿轮箱模型研究向故障下的模型研究演变而来的。但行星齿轮传动系统较为复杂,而关于动力学研究需要对实际情况进行简化,并且需要引出较多假设,无法充分考虑自身轴承、摩擦片等相关结构件以及周围环境等外部因素的影响,并未准确地反映出行星齿轮箱在实际工作中的状态。
3.2 信号处理诊断
机械系统的振动可以反馈出许多信息,研究行星齿轮传动系统的振动信号,并采用不同的处理信号手段进行分析和提取,可以用于诊断故障的特征。Zeng Z J等提出一种基于变形传递路径的行星齿轮振动信号预处理模型,该模型以变形体传递路径为前提,将响应信号在频域中表示为激励信号的积分变换,变换核由传递路径的Fourier核与频率响应函数的乘积表示,与现有的以刚体传递路径为前提的模型和方法相比,该方法在频率、振幅和模态信息方面具有更强的信号预测精度[33]。 贺妍和王宗彦基于模式识别中Fisher准则判别函数构建了核函数尺度参数优化的数学模型,增强核主元分析法对于非线性问题的分析性能,并应用于行星齿轮的磨损损伤程度的识别和诊断中,发现该分析方法能改善特征空间内数据分布结构,在行星齿轮的磨损损伤程度识别中取得了较好的尺度聚类效果,可以有效解决复杂机械传动中损伤边界模糊、损伤程度难以识别的问题[34]。荆双喜等提出一种基于时变滤波与连续小波变换(CWT)结合的无转速计阶次跟踪行星齿轮传动系统故障诊断技术,利用CWT估算获得所有振动信号采样时刻的瞬时频率,在角域使用快速谱峭度算法判断故障齿轮所在轴的位置,再通过原始振动信号的阶次谱准确地判断出故障齿轮的位置[35]。
然而,工程机械设备通常处于恶劣的运行环境中,背景噪声严重,行星齿轮传动系统结构较为复杂,更是增加了大量的噪声元素。此外,当不同程度的故障发生在多个齿轮上时,相关信号会出现复合、混叠和抵消的现象。因此,对行星齿轮传动系统进行振动信号采集具有一定难度,对于信号的解析和故障的诊断更是困难。
3.3 智能诊断
智能诊断方法的原理是采用大量的数据训练合适的智能算法,使它具有自动判断后续输入的数据故障的能力。近年来,随着人工智能的高速发展,行星齿轮传动系统的故障智能诊断也逐渐由传统的机器学习向深度学习演变。传统机器学习主要有人工神经网络、支持向量机及聚类分析等。Popiołek K和Pawlik P采用多层感知器网络对行星齿轮传动系统损伤进行识别和分类,基于阶次分析结果和行星齿轮箱负荷测量结果,建立网络的学习矢量,分析了两层和三层单向人工神经网络在行星齿轮技术状态诊断中的应用[36]。张安安等提出了一种基于EMD-SVD与概率神经网络相结合的行星齿轮传动系统故障诊断方法,将去噪后的振动信号采用经验模态分解方法自适应分解为多个本征模函数,特征向量通过对本征模函数构成的矩阵进行奇异值分解得到,最后将特征向量输入概率神经网络进行故障诊断,通过实验表明该方法具有较高的可靠性[37]。
深度学习相比传统的机器学习更为智能和精确,可以对行星齿轮传动系统的运行状态进行学习,进而智能识别故障特征和故障类型。Zhang Z Z等提出了广义归一化稀疏滤波(GNSF)无监督式智能深度学习算法,并将该方法应用于复杂工况下滚动轴承和行星齿轮的故障诊断,发现它在训练样本较少的情况下,具有较高的诊断效率和准确性[38]。熊鹏等提出一种动态加权密集连接卷积网络的深度学习故障诊断方法,将行星齿轮箱振动信号的小波包系数二维矩阵输入到密集连接卷积网络作为网络的初始特征图,并通过动态加权网络层自适应提取不同频带内的故障特征信息进行行星齿轮箱故障诊断,通过实验验证发现该方法可以有效诊断变转速行星齿轮箱的故障[39]。张宁等根据行星齿轮箱振动信号的耦合、非线性的特点,提出基于局域均值分解的样本熵和极限学习机结合的行星齿轮箱故障诊断方法,并通过实验验证和与一般神经网络对比,证明了该深度学习方法的有效性[40]。
智能诊断与其他诊断方法相比具有不依靠人为经验判断、在一定数据量训练样本的情况下能获得较好诊断效果的突出优点。然而,行星齿轮传动系统故障样本数据及其应用环境的多样化制约了智能诊断的发展。
4 展望及建议
针对行星齿轮传动系统目前的发展现状及其特点,认为应该从以下几个方面深入开展行星齿轮传动系统的研究工作,以丰富现有的理论与技术,为行星齿轮传动系统的发展提供基础:
a.深入研究并建立适用范围更广的多级行星齿轮传动系统的动力学模型,获取多级行星齿轮系统参数、模型响应及齿轮接触等因素之间的相互关系,提高多级行星齿轮传动系统动力学模型精度以更好地匹配实际中运行的行星齿轮箱特性。
b.对现有均载系数计算方法进行优化,以期更简单、快捷且精确地获取行星齿轮传动系统均载特性。此外,深入开展部件磨损和温度影响对行星齿轮传动系统均载特性的影响研究,获得更为精确的均载特性。
c.整合行星齿轮传动系统的设计数据、实验数据、运行数据、故障及维护数据等多维度数据,结合大数据的优势和人工智能的发展,发展快捷且精准的行星齿轮传动系统故障诊断技术。
猜你喜欢
中国造纸(2022年8期)2022-11-24
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
内燃机工程(2021年6期)2021-12-10
百科探秘·航空航天(2020年6期)2020-07-09
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
读者(2018年20期)2018-09-27
电子制作(2018年10期)2018-08-04