
某型混凝土泵车臂架系统的平顺性分析*
2022-01-14 05:39卞青青马雪洁柳英杰
机械研究与应用 2021年6期
卞青青,马雪洁,柳英杰,苏 江
(广东科学技术职业学院,广东 珠海 519090)
0 引 言
混凝土泵车臂架系统是混凝土泵车运送混凝土的关键部件[1-2],其功能是将搅拌好的混凝土浆料输送到预定的浇筑点进行浇注,这要求泵车臂架系统的展开和收拢运动过程平稳,便于控制。但混凝土泵车臂架系统采用多冗余度悬臂梁结构,在其工作过程中,臂架会不可避免地产生振动[3-4],对系统运行的平顺性及可靠性带来挑战。
混凝土泵车臂架系统组成复杂,包含了机械、液压和控制等多个模块,从研发到产品成型往往要耗费巨大的人力、物力和财力,并且周期较长。为了实现对现有产品的改进,提高研发效率,笔者基于MWorks平台的Modelica多领域建模仿真技术,对某型混凝土泵车的臂架系统进行了机械、液压多领域建模。为提高仿真的精确性,笔者首先建立了混凝土泵车臂架柔性模型,然后在联动工况下进行仿真,通过分析臂架系统中各节臂架刚度、液压系统阻尼等对臂架运动平顺性的影响,最终提出了相应的优化方案。
1 某混凝土泵车臂架建模
1.1 构件刚性体模型
泵车车臂架多刚体模型由多节臂架模型、伸缩油缸模型和输料管、转台等组成,首先在Creo软件中创建实体模型,如图1所示,然后将模型导入动力学仿真软件MWorks中,按照各部件的运动关系施加相应的约束副。臂架与连杆、油缸和转台施加旋转副约束,油缸缸体和油缸活塞之间施加圆柱副约束,其它连接施加转动副。

图1 泵车臂架结构示意图1.1#臂架油缸 2.1#臂架 3.铰接轴 4.连杆一 5.2#臂架油缸 6.连杆二 7.2#臂架 8.3#臂架油缸 9.连杆三 10.连杆四 11.3#臂架 12.4#臂架油缸 13.连杆五 14.连杆六 15.4#臂架
在MWorks中分别建立泵车臂架转台模型、第一、二、三、四、五节臂架刚体模型。模型通过机械接口固定在车身,并通过多个一维平动接口与液压系统的油缸相连接,完成构件刚性体的建模。
1.2 构建柔性体仿真的数学模型
为计算构件弹性变形对其大范围运动的影响,使用混合坐标来描述柔性体变形矢量。首先对柔性体构件构建浮动坐标系,假设构件位形变化为浮动坐标系大范围运动与相对于该坐标系变形的叠加,构建大范围浮动系的刚体坐标于柔性体的节点坐标(或模态坐标)建立动力学模型。具体过程如下:先将构件的浮动坐标系固化,弹性变形按照某种理想边界条件下的结构动力学有限元进行离散,然后模仿多刚体系统动力学的方法建立离散系统数学模型[5-6]。
1.2.1 柔性体的表示
用离散化的若干个单元有限节点自由度来表示物体任意多个自由度,这些单元节点的弹性变形可用少量模态的线性组合来表示[7]。假设物体的坐标系的位置用它在惯性坐标系中的笛卡尔坐标x=[xyz]T和反映刚体方位的欧拉角φ=(φθφ)来表示,模态坐标用模态坐标qi(i=1,…,M)(M为模态坐标数)来表示。考虑节点P变形前后的位置、方向和模态,则柔性体的广义坐标可选为:
ξ={xyzφθφqi(i=1,……M)}T
={xφq}T
(1)
1.2.2 柔性体模态中性文件的生成
柔性体上的任一节点位置向量可以表示为:
rp=x+GAB(sp+up)
(2)
式中:rp为臂架上任意一点P点在惯性坐标系中的位置矢量;x为柔性体的浮动坐标系原点到惯性坐标系的向量;sp为柔性体B浮动坐标系到点P的位置矢量,为一个常数;GAB为柔性体浮动坐标系到惯性坐标系的方向余弦矩阵;up是节点P在浮动坐标系中的平动变形的矢量。
变形矢量由模态坐标来描述:
up=Φpq
(3)
式中:Φp是从模态矩阵中关于节点P平动自由度的切片;Φp为3×M大小的矩阵,M为模态阶数;模态坐标qi(i=1,…,M)为柔性体的广义坐标。
根据Modelica规范,设计柔性体ModalFlexibleBody模型的层次结构如图2所示。首先输入模态中性文件MNF(Modal Neutral File)文件名和阻尼系数等参数,由外部C函数MNFParser解析出柔性部件所需数据,包括模型质量、惯性张量、特征值、模态矩阵、界面点等信息,并计算柔性体所需的九个时的不变量。结合柔性体内部参数和模态坐标及一阶、二阶导数,构建模型的力平衡、力矩平衡及运动微分方程。然后对模型进行封装,以Multibody库中的Frames作为外部组件的接口。

图2 Modal Flexible Body模型层次结构图
综上,根据柔性体原理,以模态叠加方法模拟零部件的变形,建立柔性体模型图标及组件,最终用柔性体模型替换泵车臂架系统多刚体模型中的各节臂架,得到臂架刚柔耦合多体动力学模型。
2 建立液压系统模型
泵车臂架的液压系统模型主要由流量源、溢流阀、多路阀、以及液压油缸等模型组成。臂架液压系统的流量源为系统提供所需的液压油,采用HyMo模型库中FlowSource模型,可以根据输入信号的变化提供相应的液压流量;溢流阀采用HyMo模型库中的ReliefValve元件,起到液压系统安全阀的作用;系统中采用的三位十三通的多路流量控制阀,通过外部输入信号移动滑阀阀芯的位置,可以控制通过特定油口液压油的流量;臂架液压系统的油缸模型,基于HyMo模型库建立,其内部包含阻尼孔以及单向阀元件。根据某企业提供的臂架液压缸参数如表1所列。

表1 臂架液压油缸相关参数
3 某混凝土泵车臂架联动仿真
为了保证臂架在布料范围内平滑运动,对臂架的联动工况分析,需要根据臂架的装配关系确定各部件的连接,按照各油缸的行程参数完成控制(某企业给定的液压缸参数如表1所示)。控制系统将控制信号传送至泵车臂架的液压系统中,以控制伸缩油缸运动,进而影响各节臂的运动。
在布料过程中,关节臂的联动运动最为复杂。在MWork仿真中设置3#臂架、4#臂架与5#臂架(如图1所示的臂架号)联动工况时的运动状态。各油缸的运动状态如下:1#和2#臂架液压支路关闭,管道中没有油液流动,液压缸仅在很小的范围内进行振动伸缩;而3# 、4#和5#臂架液压缸中有油液推动活塞移动,实现展开和收拢动作。
根据某企业给定的实测数据输入各个油缸的状态、系统参数(如图1所示)、运动副初值(如表2所列)等。

表2 系统参数设置 /(°)
4 仿真结果与分析
在该工况下,泵车臂架系统模型的仿真初始状态如图3所示。仿真时间设为250 s,则3#、4#和5#液压油缸的位移曲线以及臂架末端的运动情况如图4~6所示。

图3 泵车臂架初始状态 图4 泵车臂架3#、4#和5#油缸位移曲线
由仿真结果曲线可知,在12~70 s和134~190 s时,3#、4#和5#臂架油缸活塞处于缩回或伸出运动状态,这段时间臂架末端的速度和加速度曲线的变化都比较平稳;而在0~12 s、70~134 s以及190~250 s时,3#、4#或5#臂架油缸处于停止状态,此时臂架末端的速度和加速度均有较大抖动,加速度的峰值甚至可达到12.5 m2/s。在这种情况下,不仅会导致泵车布料的位置控制不精确,而且对泵车臂架的安全性和寿命也将产生较大影响。

图5 泵车臂架末端速度曲线(单位:m/s) 1.x方向速度 2.y方向速度 3.z方向速度
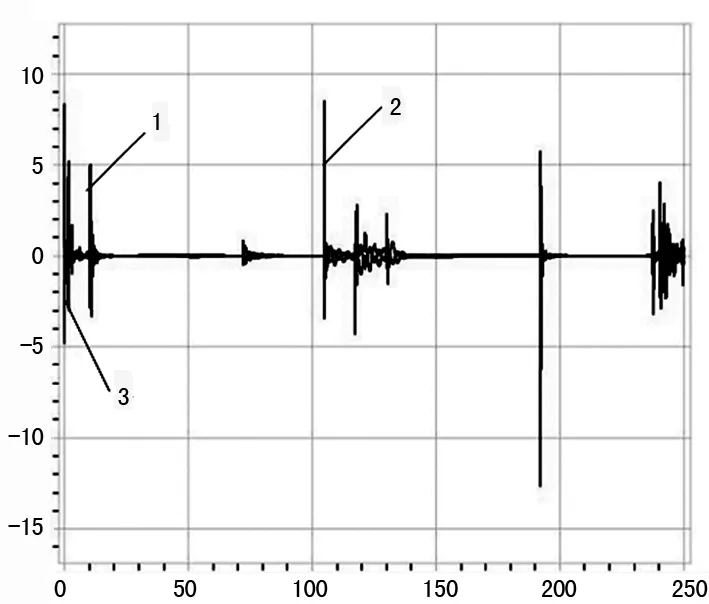
图6 泵车臂架末端加速度曲线(单位:m2/s)1.x方向加速度 2.y方向加速度 3.z方向加速度
5 结 语
基于MWorks平台建立的机械刚柔耦合模型、液压系统模型对泵车臂架各节臂架联动工况下平顺性影响因素如刚度、液压系统阻尼等进行仿真分析,机械与液压联动情况下,当前设计在刚启动、中后段时臂架运动平顺性不足,抖动剧烈,无法准确布料,需要更改机械结构设计。结果表明,该仿真技术较为高效,成本更低,本文提出了无需制造物理样机用于实体实验的方法,为企业改进某型混凝土泵车臂架系统提供了高效的研发途径,大大缩短研发周期,降低了研发成本,具有推广价值。
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
科学与财富(2021年35期)2021-05-10
中国工程机械学报(2019年6期)2019-12-31
进出口经理人(2016年15期)2017-05-10
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
大连理工大学学报(2016年5期)2016-10-12
长江大学学报(自科版)(2016年29期)2016-03-25
筑路机械与施工机械化(2015年5期)2015-06-15
商用汽车(2012年8期)2012-11-06
