无人机倾斜摄影技术三维建模及精度分析
2022-01-23 11:50邓连生张国武张云飞田金泽
湖北理工学院学报 2022年1期
薛 雷,邓连生,张国武,张云飞,田金泽
(湖北理工学院 电气与电子信息工程学院,湖北 黄石 435003)
近年来,智慧城市基础建设“实景三维中国建设”项目全面启动。随着实景三维模型构建事业迅速发展,业内对地物三维模型在实际应用场景中的质量要求也越来越高,全自动精细化实景三维模型构建成为遥感和计算机视觉领域研究的热点之一[1]。目前,实景三维数字模型构建方法主要以下有4种。①基于二维数据的三维建模。该方法虽然节约生产成本,但时间周期长、模型整体精度低、后期处理工作繁杂。②基于三维激光扫描的三维建模。该方法虽然不受自然环境条件限制,但工作量较大。③航空摄影测量技术建模。该方法虽然精度和处理速度可以满足实际作业要求,但数据获取的成本较高,需要解决视角限制等问题。④倾斜摄影测量建模。该方法利用无人机倾斜摄影测量技术获取影像,可以较好地提高三维模型的真实度、精度以及建模效率,具有作业高效、成本低等众多优势[2]。
无人机倾斜摄影测量技术打破了传统摄影测量只能搭载单相机从垂直角度拍摄获取数据的局限性,可以利用多台传感器(搭载多台相机)从不同角度获取地物的三维数据,进而更加直观、真实地反应实景地物的真实面貌和纹理。另一方面,该技术借助无人机作业的全自动模式,可以大大提高人工效率,缩短作业时间,把原本大量的外业工作转变为内业工作,降低了外业劳动强度[3]。无人机倾斜摄影测量技术使地理信息产品的生产过程更为快速和简便。与人工作业相比,其高度自动化的操作模式在构建三维数字模型上有着高性价比、高精度、高效率的优势,可以广泛满足各行业的应用需求。
以湖北理工学院医学院教学楼及周边区域为例,通过外业数据采集及内业数据处理,利用无人机倾斜摄影测量技术构建该区域的实景三维模型,并对模型结果进行精度验证。在此基础上,探讨模型建立过程中由于外业自然环境、内业处理流程等因素可能引起的结果变化,为实景三维模型的构建提供参考。
1 无人机倾斜摄影技术
无人机倾斜摄影技术是借助航测系统获取目标地物位置及姿态信息的一门技术[2]。无人机倾斜摄影三维建模技术流程如图1所示,其主要步骤如下。
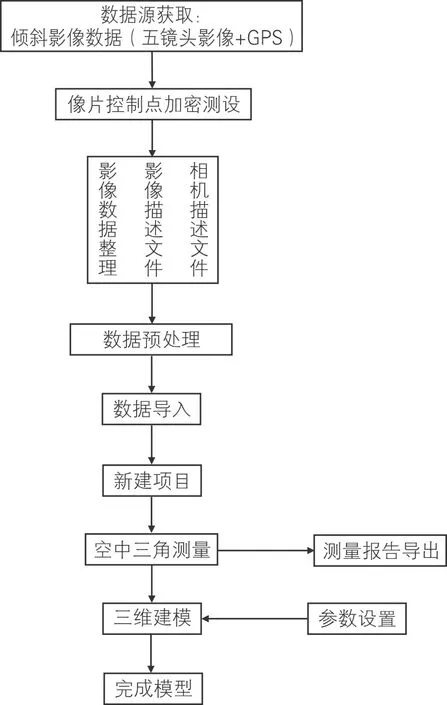
图1 无人机倾斜摄影三维建模技术流程
1)通过计算机操控搭载高分辨率航测摄影设备的无人机,使其在规定的航线上同时从5个不同的角度(1个垂直、4个倾斜)获取目标物的高分辨率遥感影像。
2)通过多视影像的地表地物的同名点坐标实现密集匹配,生成密集点云,并在此基础上对不规则三角网进行构建。
3)借助数据处理软件利用影像数据等实现三维重建。
2 数据采集
2.1 测区概况
原始影像数据获取测区为湖北理工学院医学院教学楼,是湖北理工学院校园内较大的独立建筑之一,邻近湖北理工学院西门体育场,总占地面积约为5.8×104m2。测区地形基本无起伏、建筑单一、植被较少、人流量较小。
2.2 数据获取
在理想环境条件下对目标进行拍摄,获取有价值的原始影像资料。利用南方测绘·天鸿-T610六旋翼无人机搭载五镜头传感器,获取湖北理工学院医学院主楼及周边小范围航片数据。飞行按作业需求设定有效参数为:航向重叠度82%,旁向重叠度78%,飞行高度100 m,飞行速度8.5 km/h。选取主楼拐角、井盖中心等10个控制点备用,并在其中一点架设基准站,利用GPS接收机进行静态数据采集。
3 数据处理与分析
3.1 外业数据预处理阶段
外业获取实地航拍影像后,需要对影像数据进行预处理,包括检查数据是否有缺失、是否符合作业标准和摄站坐标预处理等。首先,检查外业获取的数据(影像数据、POS数据)是否有明显缺失,确定无误后打开影像数据检查其属性信息中曝光率等指标是否达到作业要求。然后,利用GPS辅助空中三角测量原理对摄站坐标进行预处理,即对地面RTK接收机获取的GPS数据和无人机在拍摄点获取的摄站坐标信息进行平差处理,解算得到高精度的加密点三维坐标[4]。摄站坐标预处理是利用安装在无人机上的传感器和地面架设的基站接收同步且连续的GPS卫星信号,通过GPS载波相位测量差分定位技术数据处理后,获取曝光时刻摄站的三维坐标进行空三解算。部分摄站点坐标GPS辅助平差结果见表1。
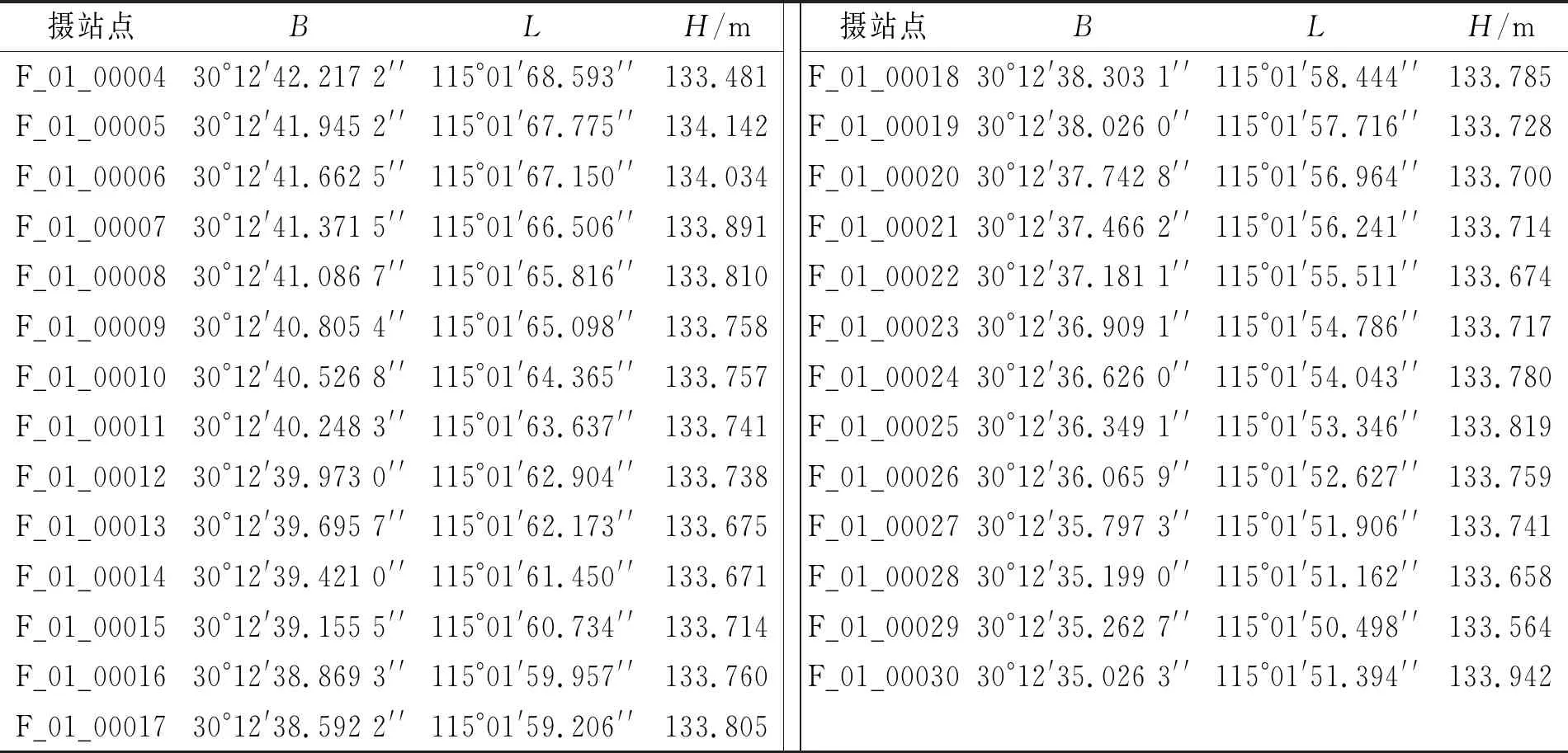
表1 部分摄站点坐标GPS辅助平差结果
3.2 内业数据处理阶段
经过外业数据的初步检核和预处理后,对其进行内业数据处理,包括空中三角测量处理和三维数字模型构建两部分。解析空中三角测量是合理地利用较少的控制点来计算大量的地面控制点(定向点),最终获取测区中所有影像的外方位元素和待定点的测量坐标,主要方法有独立模型法、光束法区域网等[5]。本文通过利用GPS辅助空三加密技术,改变了传统摄影测量先航摄、后外业像控测量、再空中三角测量加密的作业流程,减少了工序,降低了工作环境要求,提高了工作效率且保证了测量精度。原始数据空三处理信息和空三处理结果质量概述分别见表2和表3。

表2 原始数据空三处理信息

表3 空三处理结果质量概述
在完成空三解算后,通过分析相关参数,对其结果进行合格性检验。由于无人机搭载的光学相机传感器会出现镜头畸变,影响空中三角测量匹配点精度,所以需控制重投影均方根误差在1 p以内,以确保最后生成的模型在精度上符合要求。生成连接点的质量度量指标见表4。由表4可知,本次空三处理结果重投影均方根误差为0.58 p,满足精度要求。

表4 生成连接点的质量度量指标
位置不确定性表示空间实体的真实位置与实际位置之间的差别[6]。空三处理结果连接点和影像位置不确定性分别如图2和图3所示。
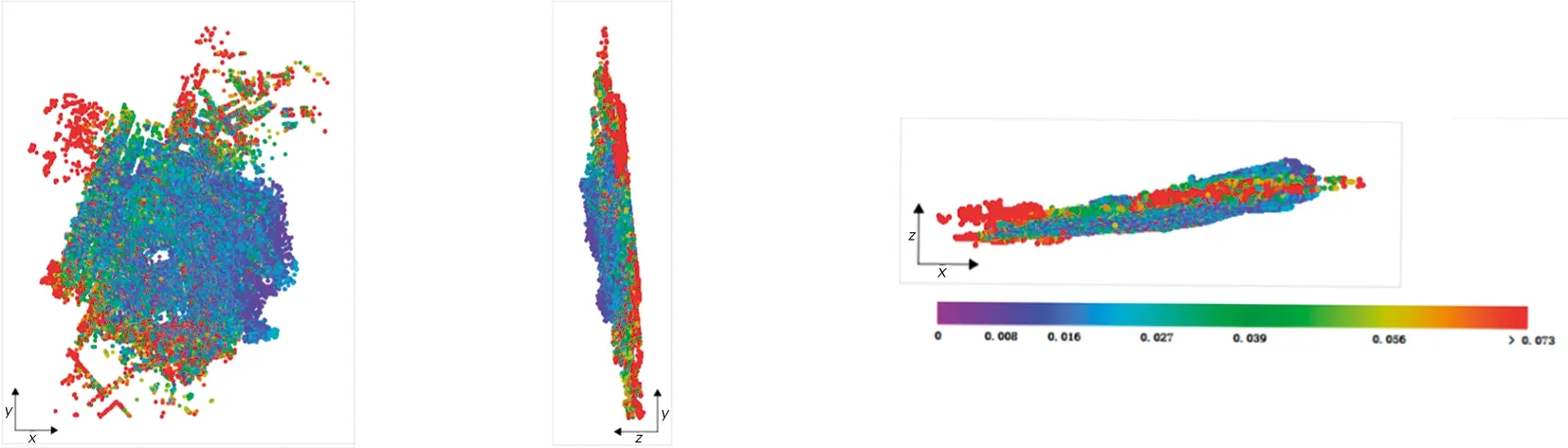
(a) 顶视图 (b) 侧视图 (c) 前视图
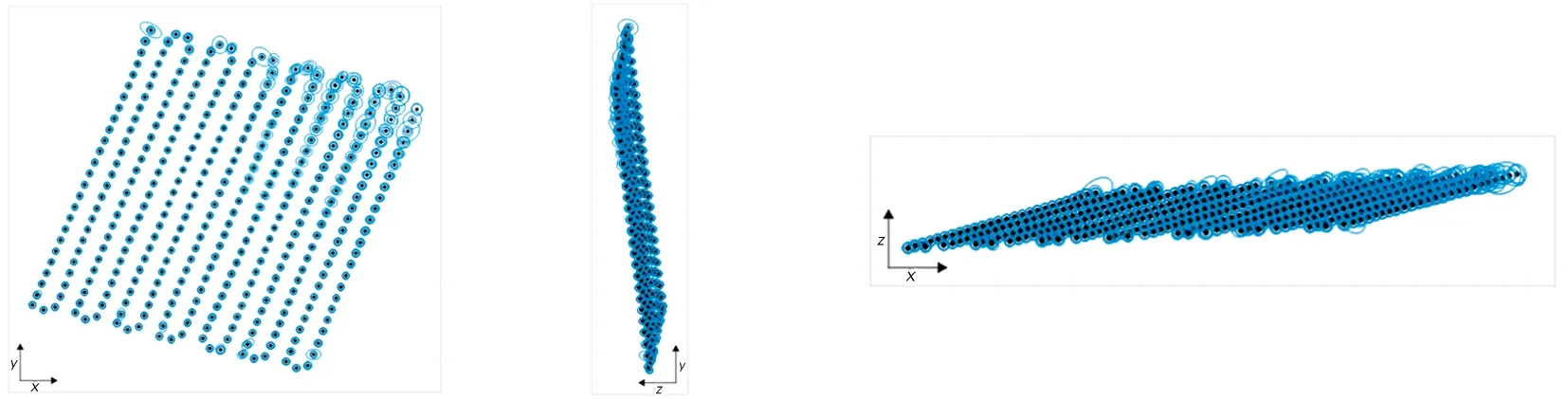
(a) 顶视图 (b) 侧视图 (c) 前视图
由图2可知,最小不确定性为0.000 6 m,最大不确定性为0.357 6 m,中位位置不确定性为0.015 6 m。图3中黑点为计算出的影像位置,蓝色椭圆表示位置不确定性,为了便于理解进行了缩放。
通过以上参数确定空中三角测量结果精度符合要求,进而可以进行三维建模处理,即利用已有的点云数据在Context Capture中进行三维模型生产,通过空中三角测量解算结果,采用多视影像匹配技术构建不规则三角网,最终进行纹理映射[7]。在三维模型生产时设置参数精度为超高(最高级别),输出坐标系为CGCS2000投影坐标系。考虑研究区域地形较为平坦,结合计算机性能将切块模式设置为规则平面网格,并分为225个瓦片。三维模型效果如图4所示。

(a) 整体效果 (b) 局部放大-1 (c) 局部放大-2
由图4可知,基于无人机倾斜摄影技术得到的湖北理工学院医学院教学楼三维模型可以立体、真实、完整地表达其实景建筑特征,且模型的细节层次清晰。
4 模型精度验证
为了保证模型的可靠性,对三维模型结果进行精度验证。以各方向及平面的中误差作为精度评价指标,公式为:
(1)
(2)
(3)
(4)
式(1)~(4)中,Mx,My,Mz,M分别为X,Y,Z方向的中误差和平面的中误差;n为检算值数目。
通过影像位置的不确定性计算出影像位置与实测坐标之间的差值Δx,Δy,Δz,进而进行结果精度的分析与研究。影像位置与实测坐标之间的差值见表5。将表5中的数据代入式(1)~(4),计算可得:

表5 影像位置与实测坐标之间的差值 m
Mx=0.0097 m,My=0.0087 m,Mz=0.0080 m,M=0.0131 m。
通过以上分析可知,X方向的最大误差为0.016 8 m,中误差为0.009 7 m;Y方向的最大误差为0.015 1 m,中误差为0.008 7 m;Z方向的最大误差为0.013 8 m,中误差为0.008 0 m;平面的最大误差为0.022 5 m,最小误差为0.000 4 m,中误差为0.013 1 m。通过无人机倾斜摄影技术搭建目标区域的三维模型精度较高,达到了《城市三维建模技术规范》(CJJ/T 157—2010)的相关标准。
5 结论
1)基于无人机倾斜摄影测量技术,借助Context Capture 软件构建的三维模型与真实的建筑物有着高度的一致性,其精度符合规范要求,验证了无人机倾斜摄影测量技术构建三维模型的可行性。
2)GPS辅助空中三角测量技术实行动态平差,较传统控制点测量的精度更高,处理更为简单有效,验证了GPS辅助空三加密技术处理的优势性。
3)三维模型X,Y,Z方向最大误差分别为0.016 8 m,0.015 1 m,0.013 8 m,达到了《城市三维建模技术规范》(CJJ/T 157—2010)的相关标准,验证了其在构建三维模型中的可靠性。
猜你喜欢
一重技术(2021年5期)2022-01-18
西部交通科技(2021年9期)2021-01-11
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
智能建筑与智慧城市(2018年11期)2018-11-28
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年11期)2018-08-04
中国资源综合利用(2017年2期)2018-01-22