
基于数字孪生的煤矿掘进机器人纠偏控制研究
2022-01-25 02:25薛旭升任众孚毛清华张旭辉马宏伟王悦
工矿自动化 2022年1期
薛旭升, 任众孚, 毛清华, 张旭辉, 马宏伟, 王悦
(1.西安科技大学 机械工程学院, 陕西 西安 710054; 2.西安科技大学 陕西省矿山机电装备智能监测重点实验室, 陕西 西安 710054)
0 引言
煤矿采掘作业面临采掘失衡的主要原因之一是掘进装备智能化水平远低于采煤装备,因此,掘进装备智能化成为提高掘进效率、确保掘进作业安全、降低作业人员数量与劳动强度、改善作业环境的重要技术手段和研究内容[1]。国家发展改革委、国家能源局等八部委联合印发的《关于推进煤矿智能化发展的指导意见》和国家煤矿安全监察局发布的《煤矿机器人重点研发目录》,均对煤矿开采装备智能化尤其是掘进机器人明确提出自主决策、智能控制和掘进环境可视化等关键技术突破的要求[2-3]。
自主纠偏控制是保证掘进机器人精确定向行走与巷道高质量成形截割的重要前提,可使掘进机器人保持最佳作业姿态,是掘进机器人智能化关键技术之一。近年来,许多学者利用PID控制[4]、区域栅格化[5]、偏差感知与控制[6]等技术研究掘进机器人位姿检测与偏移控制。宗凯等[7]研究了大倾角巷道掘进机截割过程整机滑移的力学模型,分析了掘进机偏移机理。杨健健等[8]提出了基于BP神经网络PID算法实现自主纠偏的智能化掘进机自主感知及调控技术。张旭辉等[9-13]采用人-信息-物理系统(Human-Cyber-Physical System,HCPS)交互机制、模糊PID算法、视觉导航、视觉测量、视觉伺服、遗传算法优化的BP神经网络等技术,研究掘进机器人纠偏控制和自主截割控制,研发了煤矿掘进机器人数字孪生远程操控系统,为虚拟现实、数字孪生等技术在掘进机器人机身定位及纠偏控制等方面的应用奠定了理论基础。受掘进巷道高粉尘、低照度等复杂环境限制,掘进机器人纠偏控制需进一步研究。
本文针对煤矿掘进巷道作业环境与掘进工艺特点,提出了一种基于数字孪生的煤矿掘进机器人纠偏控制系统。基于机器视觉和数字孪生技术,构建虚实同步的掘进巷道匹配模型,通过将采集的掘进机器人位姿、环境等信息与设计的理想巷道进行匹配,控制掘进机器人运行轨迹,确保掘进机器人按照掘进作业要求进行高精度截割作业;在保证巷道掘进质量的同时,通过虚实同步控制,实现掘进机器人自主远程可视化纠偏。
1 煤矿掘进机器人纠偏控制需求分析
1.1 掘进机器人偏移原因
掘进工作面环境恶劣,掘进过程中导致掘进机器人偏移的主要原因如下。
(1) 掘进机器人为大质量、大惯性装备,若巷道底板不平整或有积水、浮煤等,可能导致掘进机器人履带行走机构与巷道底板之间产生滑移,且掘进机器人移动速度较慢,对履带滑转率有较大影响,由此产生因巷道环境与掘进机器人结构造成的偏移。
(2) 采用人工结合视觉检测操作方式时,工作人员需要根据现场情况或传输的视频信号判断掘进情况,信号干扰源多、精度差,导致人工操控掘进机器人时产生偏移。
掘进机器人偏移会导致自主截割过程中的超挖、欠挖现象,导致巷道断面成形质量不理想[14]。本文在假设掘进机器人截割臂精准控制的基础上,将机身偏移距离及偏航角作为掘进机器人纠偏控制对象,研究偏移极限位置的纠偏控制参数,并采用数字孪生技术构建纠偏控制系统,实现掘进机器人位姿纠正,以减少超挖或欠挖现象。
1.2 掘进机器人纠偏控制功能需求
(1) 搭建掘进巷道及掘进机器人的数字孪生模型,实现掘进机器人物理实体与虚拟样机映射。
(2) 实时显示掘进机器人定位定向参数,解算掘进机器人位置与方向,判断当前掘进状态(正常、超挖、欠挖)并实时显示。
(3) 根据掘进状态及定位定向参数驱动掘进机器人,实现虚实协同自主纠偏控制。
(4) 通过人机交互单元实现掘进机器人的虚拟可视化远程控制。
2 系统总体方案
根据煤矿掘进机器人实际掘进作业流程与功能需求,建立基于数字孪生的掘进机器人纠偏控制系统,其由数字模型、物理模型和人机交互控制单元组成,如图1所示。数字模型主要包括巷道数字模型和掘进机器人数字模型;物理模型主要包括掘进机器人样机与视觉检测系统;人机交互控制单元主要包括监测监控界面、数据库与纠偏控制模型等。

图1 基于数字孪生的掘进机器人纠偏控制系统组成Fig.1 Composition of deviation correction control system of roadheader based on digital twin
采用Unity 3D搭建巷道与掘进机器人数字模型,如图2所示。考虑到复杂模型在虚拟仿真时对计算机资源占用较大,对掘进机器人运动原理及整体结构进行了合理简化。

(a) 巷道数字模型

(b) 掘进机器人数字模型

(c) 模型布局
视觉检测系统实时感知工作面环境信息。纠偏控制模型根据系统提取的掘进巷道空间特征参数与掘进机器人位置信息解算控制参数,并将其上传至数据库,通过虚实映射关系驱动数字模型,同时将虚拟现实环境中数字模型的控制同步映射到掘进机器人样机上。监测监控界面可实时显示图像及偏航角、偏移距离等信息,操作者通过操控掘进机器人数字模型实现对掘进机器人样机的远程纠偏控制。
3 掘进机器人纠偏控制方法
3.1 纠偏控制机理分析
煤矿巷道掘进过程中有整平和对中2种纠偏方式。整平是指控制掘进机器人的前后铲板及升降支撑,以调整掘进机器人角度;对中是指通过控制掘进机器人左右履带运动,使掘进机器人前进方向符合掘进巷道设计要求,可实现对机身偏航角的补偿。本文主要采用虚实同步控制技术实现掘进机器人对中纠偏控制,其机理如图3所示。图3(a)中,定义掘进机器人偏移巷道中线右侧为正,反之为负,偏移距离为l;图3(b)中,掘进机器人左右履带分别以速度vl,vr和补偿角(偏航角)θ行驶至如图3(c)所示位置,实现对偏移距离l的补偿,但仍存在偏航角Δθ;图3(d)中,掘进机器人左右履带分别以速度vl,vr对Δθ进行补偿,实现掘进机器人对中纠偏。

(a) 偏移

(b) 偏移距离补偿

(c) 偏航角补偿

(d) 对中纠偏
3.2 纠偏控制建模与参数分析
假设不考虑因截割头引起偏差而导致的巷道欠挖、超挖情况,简化掘进机器人与掘进巷道模型。理想的掘进巷道断面应达到设计宽度w及高度h,设置掘进机器人截割范围为宽w、高h。在截割过程中,掘进机器人偏移极限位置下的纠偏控制模型参数关系如图4所示。e为单侧偏移距离;a为极限位置超挖量;b为极限位置欠挖量。
掘进机器人以理想掘进状态运行时,视觉检测系统、掘进机器人中线与巷道中线重合。以视觉检测系统(安装在掘进机器人几何中心)为原点O′、视觉采集方向(与掘进方向相反)为Y′轴、掘进机器人在巷道断面上发生偏移的方向为X′轴,建立对中位置坐标系O′X′Y′,如图5所示。

图4 纠偏控制模型参数关系Fig.4 Parameter relationship of deviation correction control model

图5 对中与偏移位置关系Fig.5 Relationship between central and deviation positions
当掘进机器人由理想位置O′偏移至O″时,产生偏移距离l和偏航角θ。此时截割位置由理想位置A′偏移至A″,发生超挖、欠挖现象。由几何关系可得A″距Y′轴距离:
e=lO″A″sin(α-θ)-l
(1)

根据式(1),可推导出掘进机器人在巷道中的实际单侧偏移距离:
e=lO″A″sin(α±θ)±l
(2)
式(2)中,偏移距离±l和偏航角±θ由掘进机器人偏移方向决定。
经分析可得掘进状态阈值:欠挖,0
4 定位定向参数数据驱动
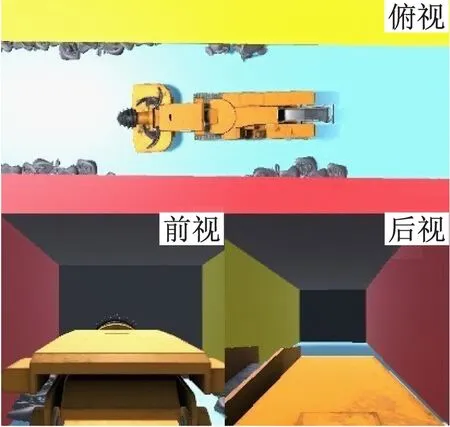
通过掘进机器人机尾携带的双目视觉传感器采集巷道空间图像,获取掘进机器人定位定向参数[15],如图6所示。以视觉检测系统为原点建立掘进机器人坐标系O′X′Y′Z′(Z′为巷道垂直方向),以视觉采集的巷道口及延伸巷道围岩图像为目标,提取巷道围岩图像特征,构建从巷道口至掘进位置的虚拟巷道环境。以巷道口断面几何中心为原点建立巷道坐标系OXYZ:X轴与X′轴同向;Y轴为掘进方向,与Y′轴反向;Z轴与Z′轴同向。空间坐标系如图7所示。根据掘进机器人作业情况,纠偏控制模型实时解算掘进机器人坐标系与巷道坐标系的位置和方向关系。

图6 掘进机器人定位定向参数采集Fig.6 Positioning and orientation parameter acquisition for roadheader

图7 空间坐标系Fig.7 Spatial coordinate system


(a) 巷道图像边缘特征提取

(b) 虚拟巷道环境重构
采用MySQL建立偏移距离、偏航角和巷道断面形状等参数数据库,通过Unity 3D数据库接口实现数字模型与数据库连接。通过Unity 3D平台导入掘进机器人和巷道数字模型,结合掘进机器人坐标系、巷道坐标系关系与数据库中的位置参数,确定掘进机器人与巷道环境的虚实映射关系。
5 掘进机器人纠偏控制流程
掘进机器人纠偏控制流程如图9所示。双目视觉传感器采集巷道图像数据,提取巷道口图像特征并建立巷道坐标系,结合掘进机器人坐标系,解算掘进机器人相对于巷道空间的位姿参数。将解算参数上传至数据库,系统读取数据库中位姿参数并显示在监测监控界面,经运算得到当前偏航角及偏移中线距离。采用式(2)计算当前掘进机器人的单侧偏移距离,将计算结果与超挖、欠挖及正常掘进状态阈值进行对比,判断当前掘进巷道断面的超挖、欠挖状态,并在相应的虚拟巷道围岩显示超挖或欠挖状况(超挖为红色,欠挖为黄色)。控制掘进机器人左右履带运动,补偿偏移距离和偏航角,完成掘进机器人对中纠偏。

图9 掘进机器人纠偏控制流程Fig.9 Deviation correction control flow of roadheader
6 纠偏控制实验
6.1 实验平台及环境模拟
以掘进机器人样机为研究对象,将双目视觉传感器安装于掘进机器人机身,建立掘进机器人纠偏控制实验平台,如图10所示。

图10 掘进机器人纠偏控制实验平台Fig.10 Experimental platform of deviation correction control of roadheader
在实验室模拟宽2 m、高3 m的矩形巷道环境,如图11(a)所示。采集环境图像后,提取图像特征,如图11(b)所示。
6.2 实验结果
为模拟掘进机器人偏移导致的超挖、欠挖工况,设置4种掘进机器人位姿参数,见表1。

(a) 模拟巷道

(b) 巷道特征提取

序号偏移距离/cm偏航角/(°)预期工况156右侧偏移2-2-3左侧偏移34-5左侧偏移4-67右侧偏移
煤矿掘进机器人纠偏控制系统监测监控界面可实时显示纠偏过程并预警,如图12所示。

(a) 位姿状态1
(b) 位姿状态2

(c) 位姿状态3

(b) 位姿状态4

(e) 监测监控界面显示
从图12可看出:当掘进机器人处于位姿状态1时,系统显示掘进机器人发生右侧偏移,造成右侧围岩超挖,而左侧围岩欠挖;当处于位姿状态2时,系统显示掘进机器人发生左侧偏移,造成左侧围岩超挖,而右侧围岩欠挖;当处于位姿状态3时,系统显示掘进机器人发生左侧偏移,造成左侧围岩超挖,而右侧围岩欠挖;当处于位姿状态4时,系统显示掘进机器人发生右侧偏移,造成左侧围岩欠挖,而右侧围岩超挖。显示结果均符合预期工况,且能够正确预警超挖与欠挖状态。当发生掘进机器人偏移后,根据监测监控界面显示信息,通过操作相关按键进行掘进机器人纠偏控制后,均能够恢复到如图12(e)所示的理想状态。
采用Matlab软件模拟掘进机器人在5 m×4 m(宽×高)的巷道内掘进作业。以外形尺寸为10.4 m×2.40 m×1.66 m(长×宽×高) 的EBZ160型掘进机器人为仿真对象,根据掘进工艺要求,规划掘进机器人纠偏控制路径,结果如图13所示。可看出掘进机器人在偏离巷道中线±0.4 m时,超挖和欠挖状态下分别行驶约9,12 m时实现对中,仿真结果符合实际纠偏控制工况,表明系统能够有效实现掘进机器人纠偏控制。

图13 掘进机器人纠偏控制路径规划Fig.13 Path planning of deviation correction control of roadheader
7 结论
(1) 针对煤矿掘进机器人受巷道环境等因素影响而难以实现自主纠偏控制的问题,提出了基于数字孪生的煤矿掘进机器人纠偏控制系统设计方案。
(2) 建立了掘进机器人和巷道数字模型、基于双目视觉图像信息的掘进机器人纠偏控制模型及定位定向参数数据库,通过数字模型与物理模型的虚实映射关系,实现了掘进机器人远程纠偏控制。
(3) 通过实验验证了基于数字孪生的煤矿掘进机器人纠偏控制系统能够有效补偿掘进机器人偏航角和偏移距离,可在定位定向参数驱动下实现虚实同步控制,掘进工况可实时显示在监测监控界面,为掘进作业提供控制决策依据,有利于提高掘进巷道成形质量。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
口腔医学(2021年10期)2021-12-02
军民两用技术与产品(2021年9期)2021-03-09
现代信息科技(2020年22期)2020-06-24
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
