
自动化测斜仪在地铁基坑水平位移监测中的应用研究
2022-02-22 03:25谢长岭冯立力彭自强
能源与环保 2022年1期
郦 亮,谢长岭,冯立力,彭自强
(1.宁波市轨道交通集团有限公司,浙江 宁波 315101; 2.浙江华展工程研究设计院有限公司,浙江 宁波 315000;3.基础设施安全监测与评估国家地方联合工程研究(江西飞尚科技有限公司),江西 南昌 330200)
现行基坑内部水平位移监测主要有传统的人工监测方法和在线监测方式。传统的人工监测存在监测频率有限、工作效率低、受气候和时间限制、无法实现全天候实时测量等不足;自动化在线监测能实时采集数据分析数据并实时预警[1-2]。为了研究自动化测斜技术在地铁基坑墙体深层水平位移监测中的效果与可行性,现以某地铁基坑围护连续墙变形监测为依托,通过与传统人工测斜监测的数据进行对比分析,了解基坑墙体深层水平位移的变形规律,评价固定式测斜自动化监测技术应用在地铁基坑墙体深层水平位移监测中的效果与可行性,对固定式测斜自动化监测技术和传统人工测斜监测技术应用在地铁基坑墙体深层水平位移监测中的表现效果与规律进行对比分析评价。
1 工程背景
宁波市轨道交通4号线白鹤站车站主体基坑宽19.7~24.5 m,长约346.17 m。东端头井基坑深为18.93 m,类矩形盾构接收井处基坑深为19.89 m,单圆盾构接收井处基坑深为19.79 m,宽9.9~10.1 m;标准段基坑深16.70~17.01 m,宽5.8 m。采用局部盖挖顺作法施工,围护型式为地下连续墙围,83351部队招待所房屋前采用厚1 000 mm的地下连续墙,其余均采用厚800 mm的地下连续墙。沿基坑深度布置1道钢筋混凝土支撑+4道钢支撑,端头井加深段增设1道钢支撑。基坑开挖断面如图1所示。
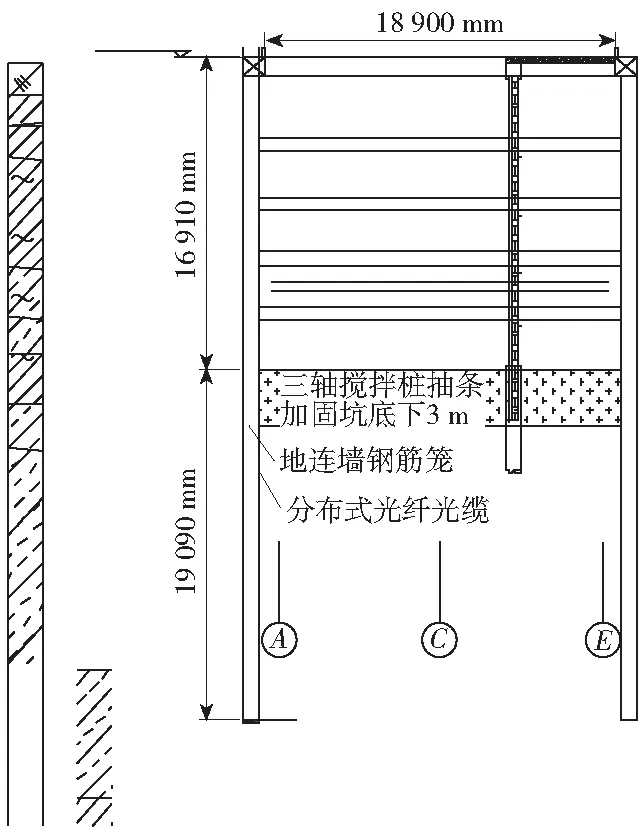
图1 基坑开挖横截面Fig.1 Cross-section drawing of foundation pit excavation
2 自动化监测系统
2.1 测点布设及传感器选择
在白鹤站车站主体基坑北侧中部选取地连墙(WN-45)作为试验段,该区域周边环境简单,无暗浜等不良地质,受施工机械影响较小,是较为理想的监测段[3-4]。在WN-45中布设人工监测点CX8和自动化监测点孔1。监测点布置如图2所示,自动化监测中围护墙深层水平位移监测采用导轮式固定测斜仪,人工监测采用手持式导轮式测斜仪,地下连续墙编号WN-45(CX8),深度为36 m,观测垂线上测点的间距为1 m,布设测点35个,人工监测测量间距为0.5 m,传感器选择见表1。
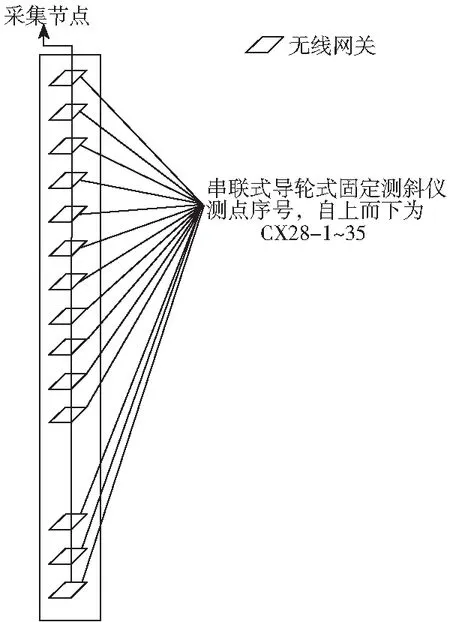
图2 深层水平位移测点布设立面Fig.2 Deployment elevation of deep horizontal displacement measuring points
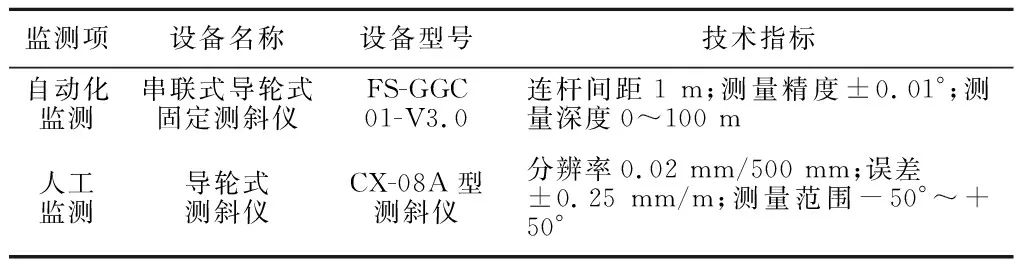
表1 设备技术指标Tab.1 Technical index of the equipment
2.2 采集传输系统
现场导轮式固定测斜仪安装采用串联连接形式。完成导轮式固定测斜仪安装测点布设后,需要安装无线节点、中继节点和无线网关,使定时采集到的数据通过ZigBee网络和GPRS传输至云平台,然后使用计算机或手机登录相应账号实时查看每个测点的深层水平位移值。数据采集时间为30 min。无线节点定时唤醒后采集的数据通过ZigBee网络传输到网关中,网关通过GPRS把数据无线传输至云平台进行存储和分析,然后就可以在云端查看钢支撑轴力的实时连续数据。
2.3 监测周期及频率
项目监测周期约为6个月,自基坑土方开挖开始至支撑拆除完成。采集频率见表2。
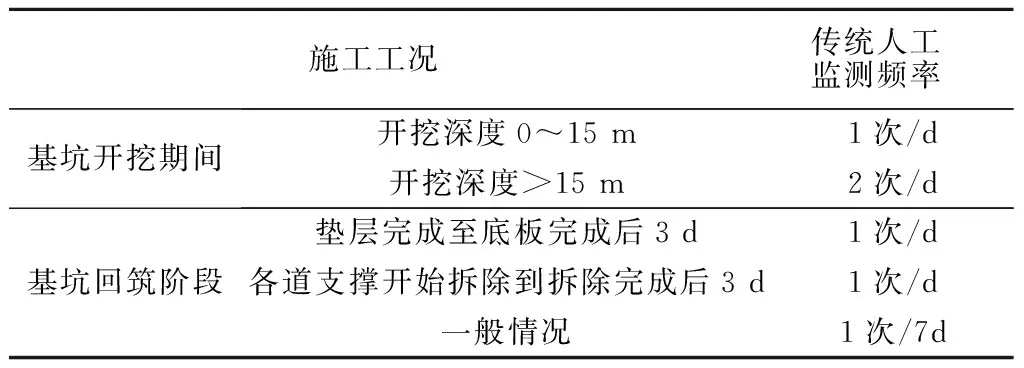
表2 采集频率Tab.2 Acquisition frequency
其中,固定式测斜自动化监测为全天候实时自动化采集。
3 监测结果与数据分析
3.1 孔1自动化与孔CX8人工监测测斜分析
3.1.1 孔1自动化监测数据分析
孔1在Y方向不同深度的位移变化趋势如图3所示,孔1在Y方向不同深度位移变化箱型如图4所示。
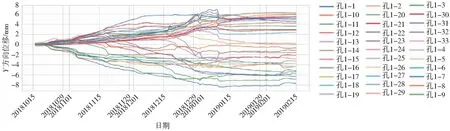
图3 Y方向位移变化趋势Fig.3 Change trend of displacement in Y direction
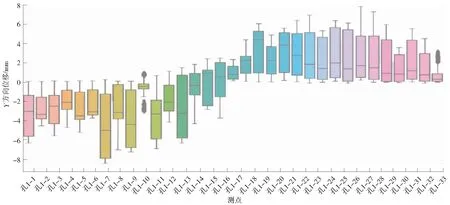
图4 Y方向位移箱型Fig.4 Displacement box diagram in Y direction
从图4中可以看出,孔1-1—孔1-13单个测点数据全为负值、孔1-13—孔1-17监测数据有正有负、孔1-17—孔1-33数据全为正。单个传感器从孔口到孔底呈现先为负、再负正,再全为正的整体规律,说明单个测点监测数据的有效性。即单个传感器监测数据正常,确保了单个测点累加后累计位移的有效性。
孔1 在Y方向每个测点的累计位移变化趋势如图5所示,从图5中可知,每个孔的累计位移值趋势均相近,累计位移变化值大多数均为非负数,即每个测点的累计位移在不断增大,除了极少数时间段外,累计位移变化率均小于2 mm/d,大多数时间段累计位移变化率在1 mm/d。累计位移变化率在2018年10月19日—10月25日增大后有趋于平稳;2018年11月2日—11月6日累计变化率有所增大,并大于1 mm,然后又开始减小;2018年11月15日—11月20日累计位移增大并大于1 mm,之后又趋于稳定。2018年12月1日—2019年1月5日,累计位移变化率大于1 mm/d;从2019年1月5日后,位移变化率逐渐趋于稳定,最后接近0。每个测点累计位移箱线如图6所示,从图6中可以看出,最终孔1-17位移变化最大,孔1-32及孔1-33位移变化最小,根据箱型图的1/4分位点、1/2分位点3/4分位点可以看出地下连续墙随着开挖的变化趋势,即随着基坑开挖,连续墙最大水平位移点在不断下移,最终在开挖面达到最大(此时开挖面的数据分布最为发散)[5]。
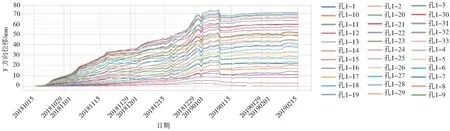
图5 Y方向累计位移变化趋势Fig.5 Variation Trend of accumulated displacement in Y direction
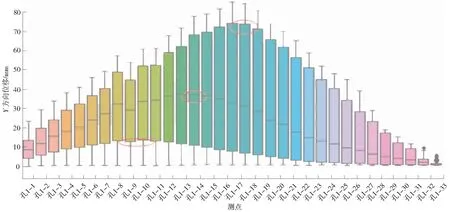
图6 Y方向累计位移箱型Fig.6 Box diagram of cumulative displacement in Y direction
3.1.2 孔1与孔CX8数据分析
本次自动化固定测斜仪深层水平位移监测的可行性验证中设置了人工测斜孔进行对比[6-7]。自动化测斜孔孔1对应的人工测斜孔为CX8,人工监测孔内传感器按0.5 m间距计算,自动化监测孔1内传感器按1 m间距布设计算,为了计算的一致性与对比的参考性,将人工孔CX8按1 m取值进行累计计算。人工孔CX8传感器间距为0.5 m,将人工孔CX8按1 m取值进行累计计算,按1m取值计算后,自动化监测和人工监测最终累计位移曲线如图7所示。从图7中可以看出,自动化监测与人工监测累计深度位移曲线相似,均在-16~-18 m处出现最大水平位移,人工测斜监测最大水平位移为53.6 mm,孔口-1 m处水平位移为1.53 mm,孔底-33 m水平位移为-3.2 mm,自动化测斜监测最终最大水平位移为64.5 mm,孔口-1 m处水平位移为5.9 mm,孔底-33 m水平位移为-3.25 mm,人工监测测斜孔CX8与孔1数据散点如图8所示,从图8中可以看出,孔CX8与孔1相关性高[6],相关系数R2为0.914 1。
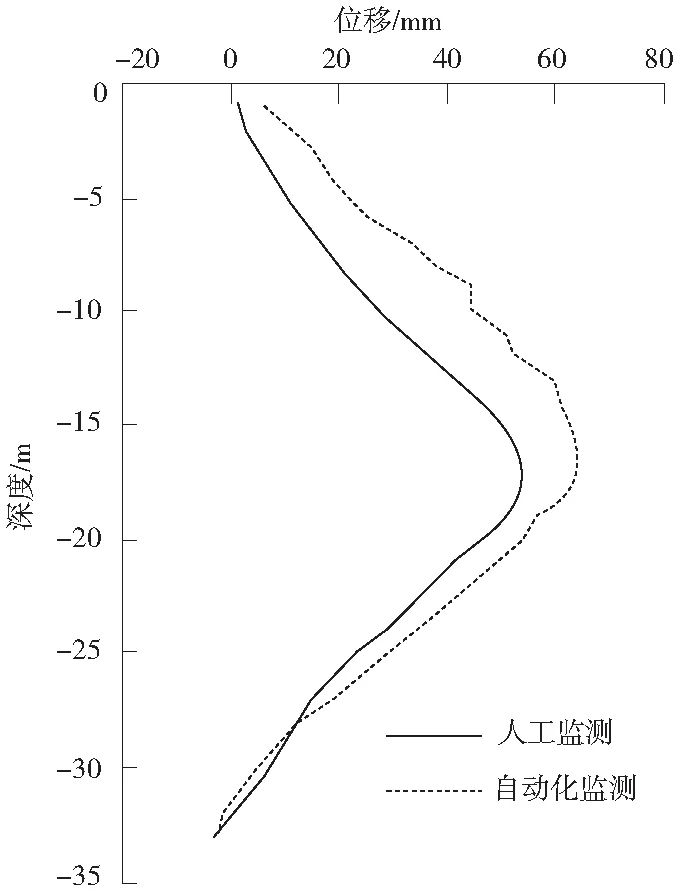
图7 自动化人工测斜对比Fig.7 Comparison of automatic manual inclinometer
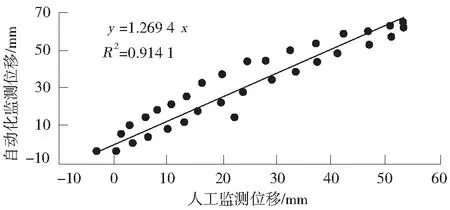
图8 自动化人工测斜关联Fig.8 Automatic manual slope measurement correlation
3.2 现场工况匹配
自动化测斜孔孔1布设间距1 m,能较好地反映地下连续墙水平位移变化,因此对孔1及其附近人工测孔CX8进行施工工况匹配分析,根据每层钢支撑的支撑时间,进行5次工况匹配分析。
3.2.1 第1次支撑后开挖水平位移变化
自动化测斜孔孔1和人工测斜孔CX8在2018年10月23—27日各测点的累计水平位移曲线如图9所示。从图9中可以看出,自动化监测与人工监测表现出相同变化规律。在2018年10月23—27日各测点累计位移日变化率均为正值,在10月23—24日日变化量最大,最大变化率为2 mm/d,到10月25日后,变化率变小并小于1 mm。自动化监测最大累计位移为8.1 mm,人工监测最大累计位移为9 mm,均在-9 m左右深度。自动化监测与人工监测均在10月24日变化率最大,并在-9 m处左右达到最大累计位移。这与第1次开挖后支撑工况相匹配。
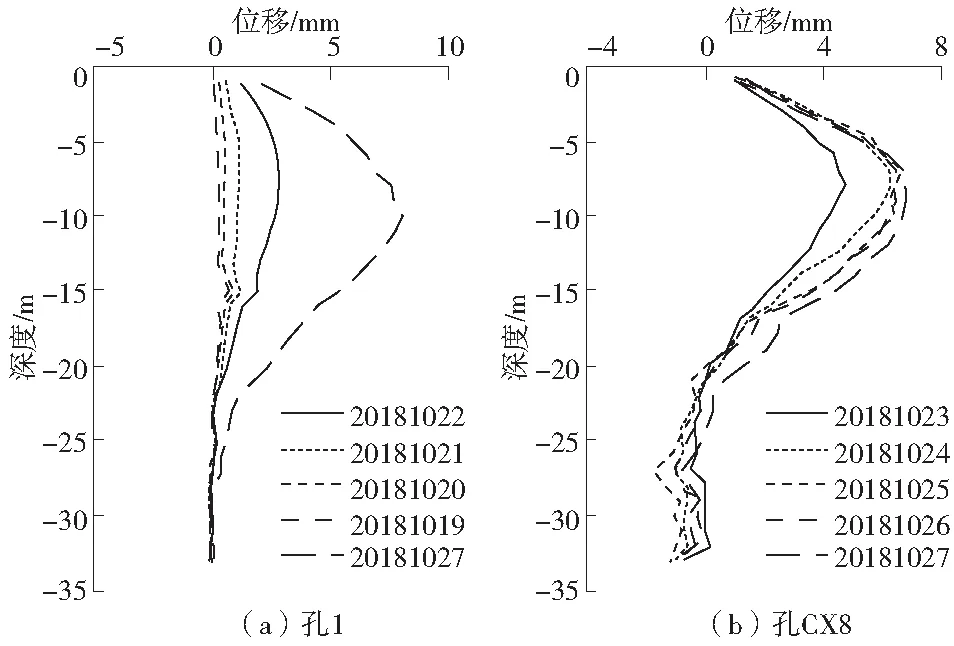
图9 第1次支撑后孔1与孔CX8累计位移变化Fig.9 Cumulative displacement changes of hole 1 and CX8 at the first steel support
3.2.2 第2次支撑后开挖水平位移变化
自动化测斜孔孔1和人工测斜孔CX8在2018年11月2—6日各测点的累计水平位移深度曲线如图10所示。从图10中可以看出,自动化监测与人工监测每天变化规律相同。在2018年11月2—6日施工期间,在11月4—5日变化量最大,最大变化率为2.5 mm/d,至11月5日后,变化率变小并小于1 mm。自动化监测最大累计位移为19.29 mm,人工监测最大累计位移为16.58 mm,均在-10~-11 m深度。自动化监测与人工监测均在11月5日变化率最大,并在-10~-11 m处达到最大累计位移。这与第2次开挖后支撑工况相匹配。
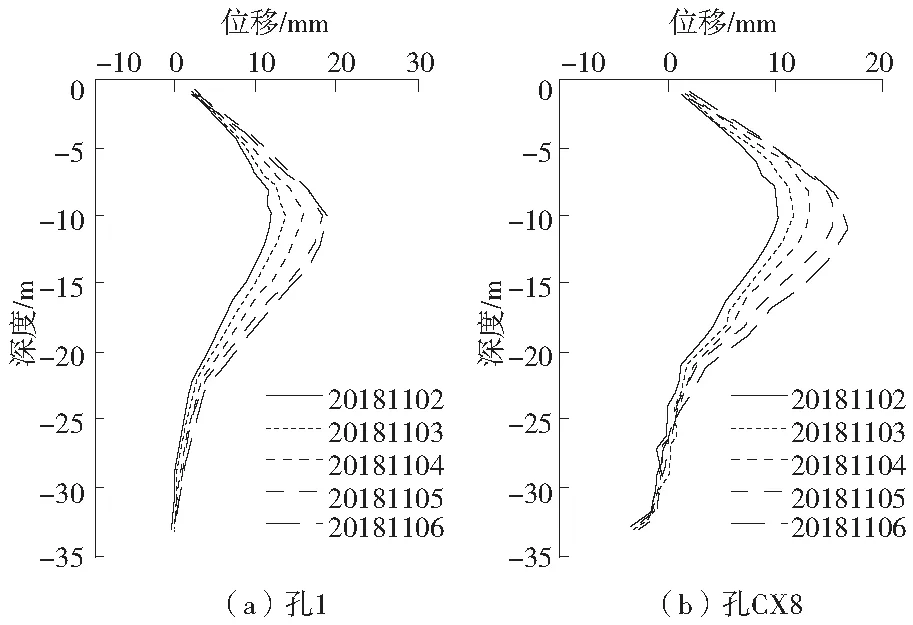
图10 第2次支撑后孔1与孔CX8累计位移变化Fig.10 Cumulative displacement changes of hole 1 and CX8 at the second steel support
3.2.3 第3次支撑后开挖水平位移变化
自动化测斜孔孔1和人工测斜孔CX8在2018年11月15—19日各测点的累计水平位移深度曲线如图11所示。从图11可以看出,自动化监测与人工监测每天变化规律相同。2018年11月15—19日施工期间,11月17—18日日变化量最大,最大变化率为2.8 mm/d,至11月18日后,变化率变小并小于1 mm。自动化监测最大累计位移为32.5 mm,人工监测最大累计位移为29.97 mm,最大累计位移均在深度-12~-13 m。自动化监测与人工监测均在11月18日变化率最大,并在深度-12~-13 m处达到最大累计位移。这与第3次开挖后支撑工况相匹配。
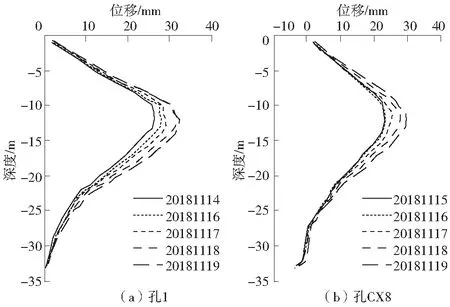
图11 第3次支撑后孔1与孔CX8累计位移变化Fig.11 Cumulative displacement changes of hole 1 and CX8 at the third steel support
3.2.4 第4次支撑后开挖水平位移变化
自动化测斜孔孔1和人工测斜孔CX8在2018年12月19—23日各测点的累计水平位移深度曲线如图12所示。从图12可以看出,自动化监测与人工监测每天变化规律相同。在2018年12月19—23日施工期间,12月20—21日日变化量最大,最大变化率为3 mm/d,至12月21日后,变化率变小并小于1 mm。自动化监测最大累计位移为52 mm,人工监测最大累计位移为45.6 mm,最大累计位移均在深度-15~-16 m。自动化监测与人工监测均在11月18日变化率最大,并在深度-15~-16 m处达到最大累计位移。这与第4次开挖后支撑工况相匹配。
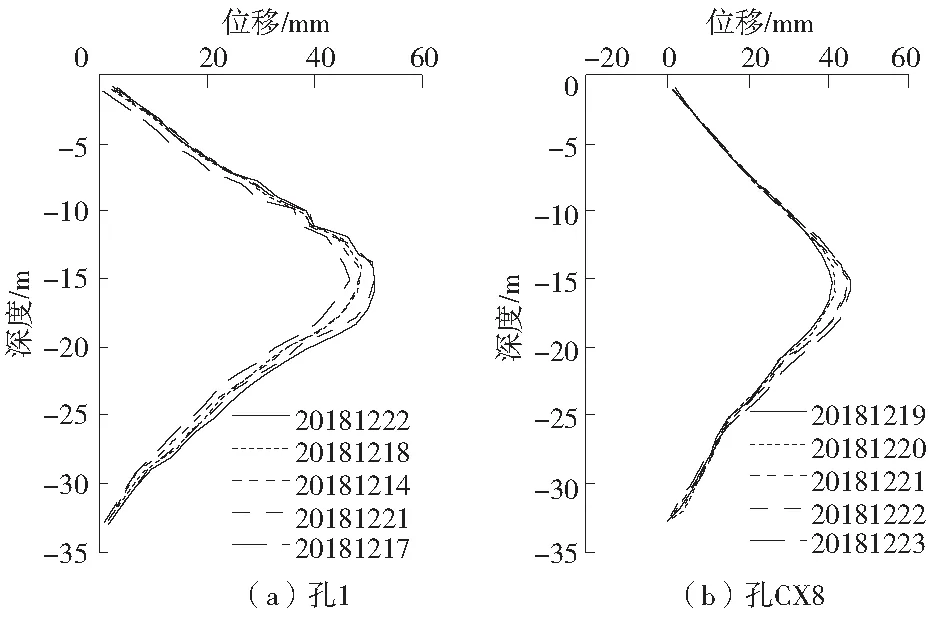
图12 第4次支撑后孔1与孔CX8累计位移变化Fig.12 Cumulative displacement changes of hole 1 and CX8 at the fourth steel support
3.2.5 第5次支撑后开挖水平位移变化
基坑底板浇筑后各测点累计位移变化如图13所示。
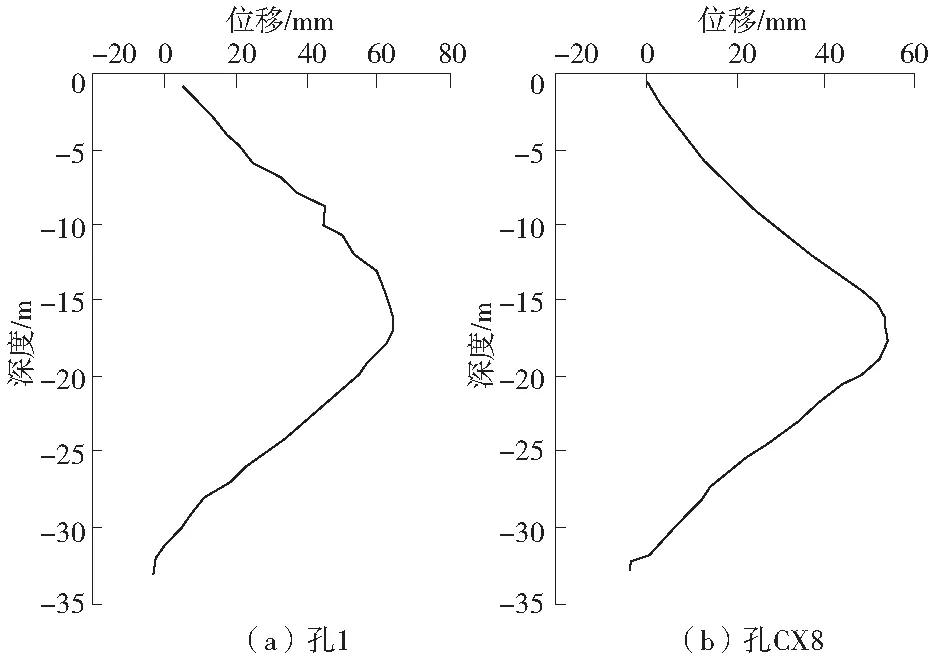
图13 孔1与CX8最终累计位移变化Fig.13 Final cumulative displacement variation of hole 1 and CX8
从图13中可以看出,自动化监测与人工监测累计深度位移曲线相似,均在深度-16~-18 m处出现最大水平位移,人工测斜监测最大水平位移为54 mm,自动化监测最大水平位移为64.5 mm,最大水平位移相差10 mm,相对误差为15.5%。因为人工孔CX8是测量地下连续墙变形,而孔1是监测附近软土变形,导致最终最大水平累计位移有所不同,这也与结构物的变形情况类似。人工监测及自动化监测测斜最终累计位移变化曲线均呈“啤酒肚”形,最终累计位移深度曲线形成中间大、上下两端小的特点,均在最终开挖面(-17 m左右)处达到最大水平位移,这与实际受力、工况相匹配。
自动化监测孔1与人工监测孔CX8线性拟合关系好,拟合系数为0.912。自动化监测和人工监测均能很好地反映了基坑地下连续墙水平位移变化趋势,说明人工测斜和自动化固定测斜仪在基坑深层水平位移监测中的可行性,由于孔CX8和孔1呈线性关系,且相关性好,整体趋势相似,说明了自动化监测能代替人工监测进行基坑连续墙位移监测。
4 结论
(1)通过对孔单个测点数据分析,单个传感器从孔口到到孔底呈现先负、再负正、再全为正的整体规律,说明单个测点监测数据的有效性;对测点累计位移分析,地下连续墙最大水平位移一直在开挖面附近达到最大,最终在深度-17 m处达到最大。
(2)人工监测和自动化监测深层水平累计位移曲线均能及时、准确地反映各种工况条件下引起的基坑水平位移,说明自动化监测能较好地反映深层水平位移的变形情况,进而验证了固定测斜仪在基坑深层水平位移监测中的可行性。
(3)自动化测斜和人工测斜最终深度水平位移曲线均呈“啤酒肚”形,最终形成中间大、上下两端小的特点,即传感器间距为1 m的自动化测斜仪深层水平位移监测与人工0.5 m间距的测斜仪深层水平位移监测规律类似。
猜你喜欢
制造技术与机床(2022年2期)2022-02-22
湖南电力(2021年4期)2021-11-05
建材发展导向(2021年7期)2021-07-16
汽车实用技术(2021年10期)2021-06-04
初中生世界·九年级(2020年9期)2020-09-21
天津城建大学学报(2020年4期)2020-09-10
马克思主义哲学研究(2020年2期)2020-07-21
水利规划与设计(2020年1期)2020-05-25
热带农业科学(2020年1期)2020-03-21
火力与指挥控制(2016年8期)2016-09-21
