
微型客车防侧翻底盘集成控制策略
2022-03-07 02:38李胜琴冯新园
江苏大学学报(自然科学版) 2022年2期
李胜琴, 杜 鹏, 冯新园
(东北林业大学 交通学院, 黑龙江 哈尔滨 150040)
车辆行驶过程出现的交通事故一般分为正碰、侧碰、侧翻、追尾和坠车5种,其中侧翻事故的危险性最大,伤亡率最高.据相关数据[1]表明,在全部单车交通事故中,车辆侧翻事故约占5%,侧翻会导致严重的人员伤亡,因此,如何提高车辆防侧翻能力已成为车辆安全领域的研究热点.微型客车由于质心位置较高,悬架刚度相对较小,极易在转向时产生较大横向载荷转移,导致车辆侧翻[2].目前城郊地区或农村大部分校车仍然采用微型客车,且所发生的校车交通事故中,大多数为微型客车的侧翻,所以有必要对微型客车进行有效的防侧翻控制.
为提高车辆的防侧翻能力,研究人员做了大量研究.LUO J. W.等[3]、LI P. S.等[4]提出了基于四轮主动转向和主动悬架的集成控制策略,设计车辆动力学状态反馈跟踪器,在紧急状况下对车辆施加侧向力及载荷传递比来改善车辆性能.T. HAMID等[5]为了能够跟踪驾驶员的期望路径,设计了差动制动与后轮主动转向的MPC(modle predictive control)控制器,有效防止了车辆偏离驾驶员预期行驶路线.邵可[6]为了研究侧翻机理,建立了载荷转移系数模型,对侧翻影响因素进行了分析,分别对重型车辆和乘用车的主动转向防侧翻控制进行了研究,提出了车辆主动防侧翻自适应鲁棒控制,结果表明,所提出的控制器可以保证侧向加速度快速收敛到期望值.陈松等[7]为了研究车辆侧翻控制,将差动制动控制与主动横向稳定杆控制进行联合,利用全轮差动制动控制提高了车辆的横摆稳定性,同时利用主动横向稳定杆控制车身侧倾角,通过紧急工况下的仿真试验,证明了控制系统的有效性.
综合看来,对车辆侧翻进行集成控制,多数是将主动转向和主动/半主动悬架、主动转向和差动制动等进行集成[8-9],集成主动悬架和差动制动进行防侧翻控制的研究还相对较少.笔者针对微型客车防侧翻问题,提出主动悬架和差动制动分层集成控制策略,上层控制器依据车辆运动状态协调下层控制器动作,下层控制器依据上层指令分别实施主动悬架控制或差动制动控制,降低车辆侧翻发生的几率.
1 微型客车参数化模型的建立
针对某款微型客车,利用CarSim软件进行参数化建模.车辆参数如下:整车质量为1 988 kg;簧载质量为1 663 kg;前悬架非簧载质量为45 kg;后悬架非簧载质量为35 kg;前悬架垂直刚度为4 900 N·m-1;后悬架垂直刚度为4 700 N·m-1;前悬架阻尼为3 570 N·s·m-1;后悬架阻尼为3 760 N·s ·m-1;质心到侧倾中心距离为0.50 m;轮距为2.72 m;前、后轴到质心距离分别为1.15、1.43 m;整车绕x轴转动惯量为753 kg·m2;整车绕y轴转动惯量为4 510 kg·m2;整车绕z轴转动惯量为4 510 kg·m2;轮胎径向刚度为138 kN·m-1;前、后轮胎的侧偏刚度均为35 kN·rad-1.
2 防侧翻下层控制系统建立
2.1 主动悬架防侧翻控制策略
由于车轮所受的侧向力和纵向力都是车轮垂向载荷的函数,而车轮的垂向载荷又可以通过主动悬架系统来调节,所以为了能够更加有效地对微型客车进行防侧翻控制,提出主动悬架防侧翻控制策略,设计主动悬架控制子系统.
在车辆侧翻相关研究中,有很多可表征车辆是否发生侧翻或有侧翻趋势的指标,例如车辆侧向加速度、车身侧倾角以及横向载荷转移率等,其中横向载荷转移率[10]为
(1)
式中:Flz为车辆左侧车轮所受垂直载荷之和;Frz为右侧车轮所受垂直载荷之和.
当车辆直线平稳行驶时,两侧车轮垂直载荷相等,即LTR为0;当车辆转向行驶或受到路面激励导致车辆产生侧倾运动时,左、右侧车轮的垂直载荷将发生转移,LTR不再为0;随着侧倾运动的加剧,当车辆一侧车轮离开地面时,该侧车轮的垂直载荷将变为0,此时车辆发生侧翻,LTR的绝对值为1.因此,利用LTR作为车辆侧翻指标充分运用了车辆发生侧翻时内侧车轮先离开地面的原理,具有通用性.一般设置小于1的侧翻阈值作为触发控制系统的指标,侧翻阈值过小会导致控制系统对驾驶员操纵意向的干预过于频繁;侧翻阈值过大会加大车辆发生侧翻的风险,系统不能及时对车辆进行控制,一般设置侧翻阈值|LTR|=0.8~0.9[11],本研究设定|LTR|=0.8.当|LTR|≥0.8时,判定车辆有发生侧翻的危险,控制系统被激活,对车辆进行控制.PID控制器控制精度较高,模糊控制鲁棒性强,可对复杂的被控对象进行有效控制.结合2种控制器优点,设计主动悬架模糊PI控制器,其原理如图1所示,其中:ke、kec为量化因子;Kp、Ki为输出.
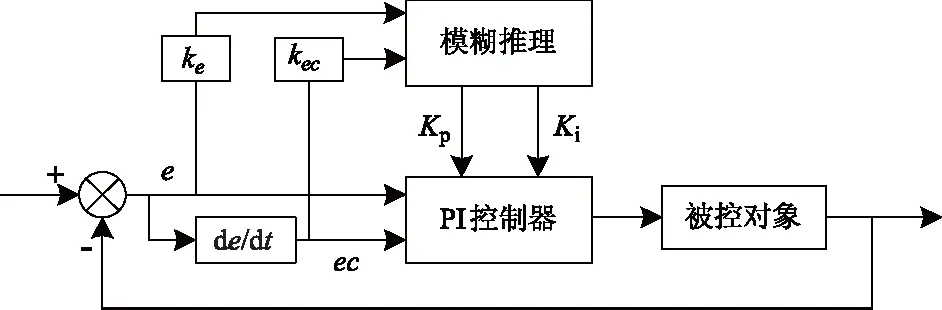
图1 模糊PI控制原理图
以能够及时反映车辆侧倾状态的车身侧倾角与理想车身侧倾角的偏差e及其偏差变化率ec作为控制器的输入,对应的模糊量以E、EC表示,输出量为主动悬架控制力.E、EC、Kp、Ki的模糊子集均用{NB,NM,NS,ZO,PS,PM,PB}表示,输入变量与输出变量的模糊论域均为{-6,-4,-2,0,2,4,6},输入变量和输出变量与对应模糊子集的隶属关系分别选用高斯型隶属度函数和三角形隶属度函数表示,如图2-5所示,其中f(E)、f(EC)、f(Kp)、f(Ki)分别为E、EC、Kp、Ki的隶属度函数.
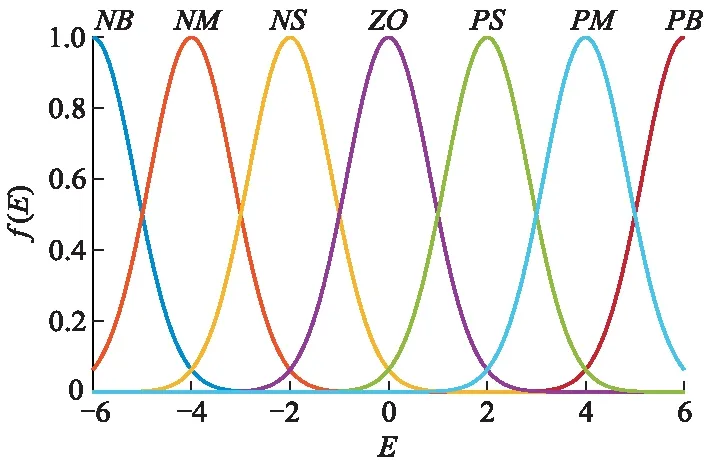
图2 输入变量E的隶属度函数

图3 输入变量EC的隶属度函数

图4 输出变量Kp的隶属度函数

图5 输出变量Ki的隶属度函数
Kp、Ki的模糊控制规则分别如表1、2所示.
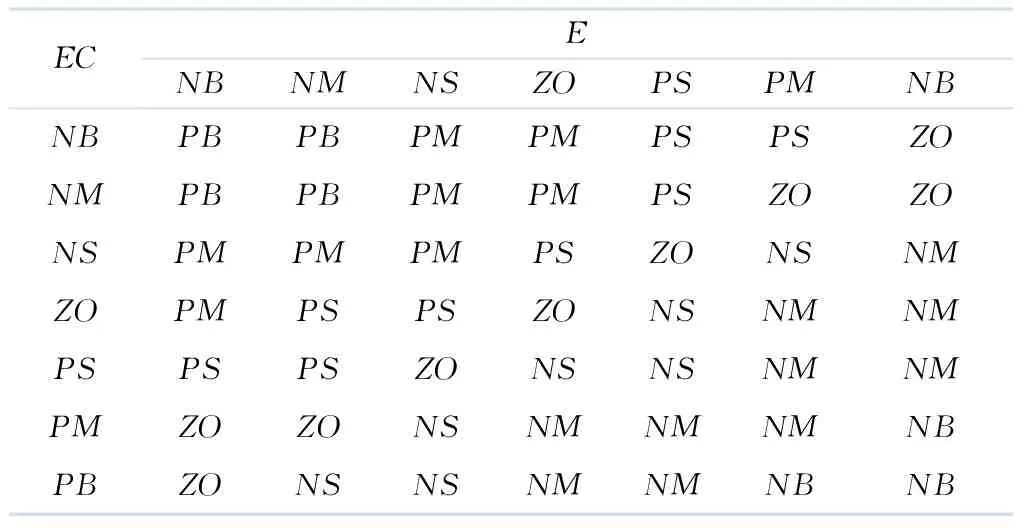
表1 Kp模糊控制规则

表2 Ki模糊控制规则
依据模糊PI控制器的设计原理及控制规则,利用Matlab/Simulink软件,建立主动悬架模糊PI控制器, 如图6所示,用于计算悬架控制力.依据所设计的控制器以及提出的主动悬架防侧翻控制策略,建立主动悬架控制系统模型,如图7所示.控制系统依据LTR值,分别对车辆前后及左右悬架施加相应控制力.系统中的信号选择器通过识别LTR的符号来判断车辆的侧倾方向,如果LTR大于0.8,则说明此时车辆有向左侧翻的危险,需要对左侧悬架施加适当的正向控制力.同理,如果LTR小于-0.8,车辆就会有向右侧翻的危险,需要对右侧悬架施加正向控制力.控制力的大小由模糊PI控制器计算,然后通过分配器将控制器产生的主动悬架力分配给对应的悬架,进而对车身施加相应的垂向力,抑制侧翻的发生.

图6 主动悬架模糊PI控制器
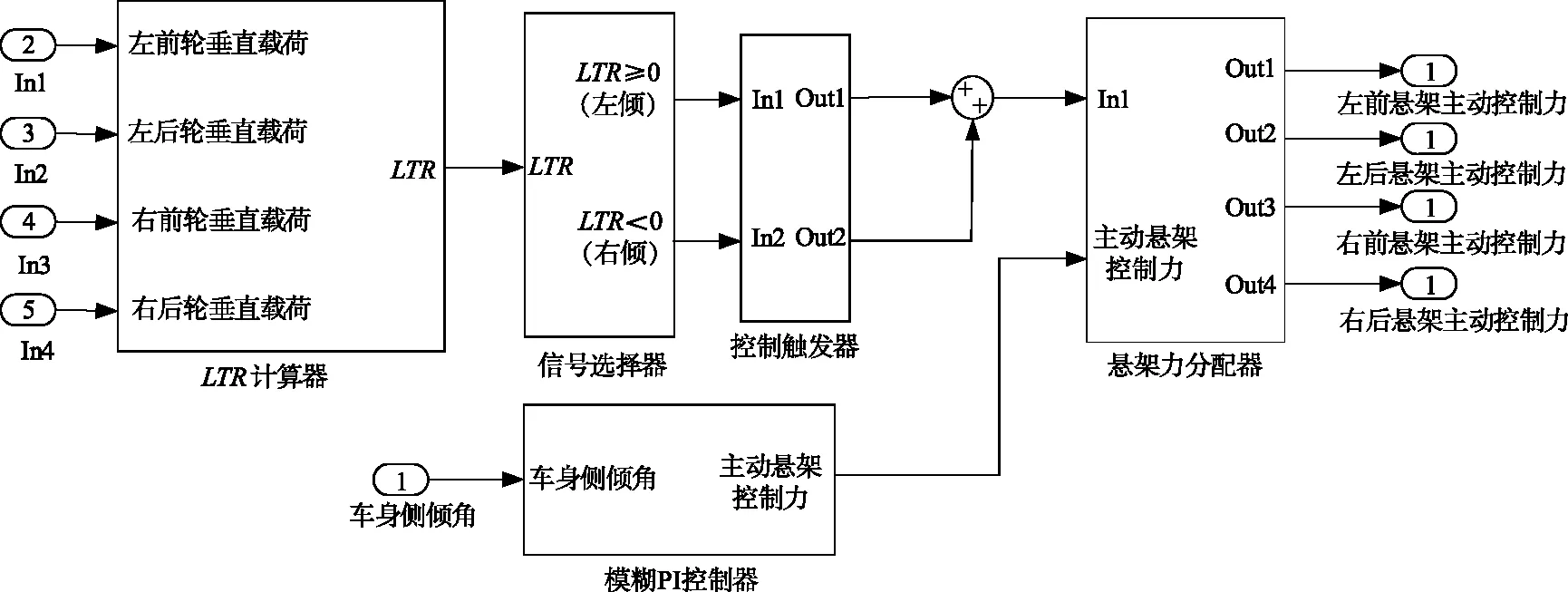
图7 主动悬架控制系统模型
2.2 差动制动防侧翻控制系统的建立
差动制动可通过对车轮单独施加制动力以改变车辆转向特性,以不足转向为代价防止发生侧翻.
2.2.1参考模型
忽略空气阻力影响,认为车辆只做平行于地面的运动,建立车辆二自由度参考模型,如图8所示,用来描述车辆理想的横摆角速度和质心侧偏角状态.

图8 理想线性二自由度参考模型
由图8可知,车辆在质心处的侧向加速度为
(2)
式中:v为车辆侧向速度;ωr为车辆横摆角速度;u为车辆纵向速度.
对应的车辆运动方程为
(3)
式中:k1为车辆前轮的侧偏刚度;k2为车辆后轮的侧偏刚度;β为车辆的质心侧偏角;m为整车质量;a为车辆前轴到质心的距离;b为车辆后轴到质心的距离;δ为车辆的前轮转角;Iz为车辆绕z轴的转动惯量.
将式(2)、(3)联立,得到稳态响应下车辆的横摆角速度期望值,即
(4)
同时为了防止车辆发生侧滑,侧向加速度ay不得超过轮胎与路面附着系数所决定的最大侧向加速度,即
(5)
式中:μ为路面附着系数;g为重力加速度.
极限横摆角速度为
(6)
综合考虑乘坐舒适性和安全性,通常ωr≤ωrmax,由于在不同附着系数路面上稳态横摆角速度与极限横摆角速度大小不同,所以理想横摆角速度为
ωr0=min(|ωrmax|,|ωr|).
(7)
同理,理想质心侧偏角为
βr0=min(|β|,|βmax|),
(8)

1 资料来源 回顾性调查分析新生儿疾病筛查系统投入使用前和使用后1年间的疾病筛查资料和其他业务指标:新生儿疾病筛查病种包括先天性甲状腺功能减低症(CH)、葡萄糖-6-磷酸脱氢酶(G6PD)缺乏症、苯丙酮尿症(PKU)。疾病筛查资料包括初筛率、复筛率、随访率。系统投入使用前(2015年)为对照组,使用后(2016年)为研究组。
2.2.2控制策略
采用模糊PID控制进行控制器的设计,选取车辆实际横摆角速度与其期望值的差值eω和车辆实际质心侧偏角与其期望值之差eβ为控制器的输入,
对应的模糊变量以Eω、Eβ表示,控制器输出的变量为车辆的附加横摆力矩M.设输入变量模糊子集为{NB,NS,ZO,PB,PS},由于控制器是双输入单输出,为了保证控制系统的精确性与稳定性,输出变量选用7个模糊等级,即模糊子集为{NB,NM,NS,ZO,PB,PM,PS},输入输出模糊论域均取[-1,1],隶属度函数如图9所示,其中f(Eβ)、f(Eω)、f(M)分别为Eβ、Eω、M的隶属度函数.

图9 Eβ、Eω和M的隶属度函数
M的模糊控制规则如表3所示.

表3 M的模糊控制规则
根据上述模糊PID控制器的设计原理以及所提出的差动制动防侧翻控制策略,建立差动制动控制系统模型,如图10所示.系统中信号选择器根据LTR的正负来判断车辆侧倾的方向,然后制动力矩分配器将控制器产生的附加横摆力矩施加给对应车轮,当LTR大于0.8时,对左前轮施加制动力矩;当LTR小于-0.8时,对右前轮施加制动力矩,从而防止侧翻的发生.

图10 差动制动控制系统模型
3 防侧翻集成控制系统的建立
提出基于差动制动和主动悬架的防侧翻集成控制策略,利用差动制动控制来弥补主动悬架控制响应速度慢、实时性较差的缺点,而针对车辆一侧车轮即将离开地面的情况,同时为改善差动制动对车辆横摆稳定性所产生的不良影响,利用主动悬架控制对车身姿态进行调整,进而使车辆的横向载荷转移率被控制在允许的范围内.
根据主动悬架控制和差动制动控制的优点与不足,建立协调控制系统,如图11所示.

图11 集成控制系统示意图
系统输入为前轮转角及车速,输出为车身侧倾角、横摆角速度、质心侧偏角、行驶速度以及各车轮垂向力等参数,根据各车轮的垂向力计算出横向载荷转移率LTR,同时根据LTR的大小来判断是否触发控制系统,当LTR超过侧翻阈值时,触发集成控制系统;将LTR以及状态参数输入到上层协调控制器中进行任务分配逻辑处理,把状态参数的输入信号转化为对应控制子系统的选择信号;将选择信号传递给下层2个不同的控制子系统,从而改善车辆的侧翻稳定性.
4 仿真试验验证
4.1 鱼钩试验工况
鱼钩试验工况可以准确反映驾驶员在连续躲避障碍物或因操作失误而造成过度转向等实际情况,是车辆侧翻试验中最为恶劣的行驶工况之一.转向盘转角输入曲线如图12所示.选用干燥沥青路面,路面附着系数设为0.85,设置初始车速为100 km·h-1,分别用主动悬架控制、差动制动控制以及集成控制3种控制方法对车辆进行仿真试验.车辆在主动悬架控制、差动制动控制以及集成控制情况下各性能指标仿真结果对比如图13-15所示,其中:δ1为转向盘转角;α为车身侧倾角.

图12 鱼钩试验转向盘转角输入曲线
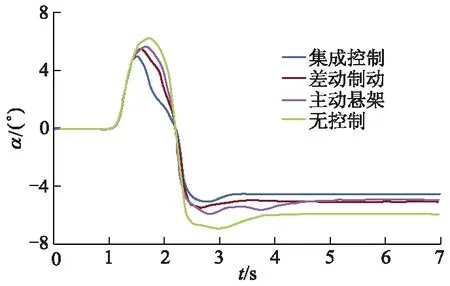
图13 鱼钩试验车身侧倾角对比图
从图13可以看出:车辆在无控制情况下,车身侧倾角在2.5 s后达到了负向最大值-7.0°,对车辆施加控制后,3种控制方法均降低了车身侧倾角(绝对值)的大小,但在集成控制下,车身侧倾角(绝对值)减小的幅度最大,最后稳定在-4.1°左右,控制效果最好.从图14、15可以看出:通过集成控制后,车辆横摆角速度的峰值和波动幅度也明显减小,最小值减小到了-39 (°)·s-1,质心侧偏角也在1.5 s以后有所减小,提前进入稳定值,在2.5°左右.

图14 鱼钩试验横摆角速度对比图

图15 鱼钩试验质心侧偏角对比图
4.2 角阶跃试验工况
角阶跃试验工况下转向盘转角输入曲线如图16所示.

图16 角阶跃工况转向盘转角输入曲线
从图16可以看出:当车辆前轮转角达到最大值时会出现瞬间停顿,车辆在这种工况下高速行驶时极容易发生侧翻危险,所以采用角阶跃输入对所提出的主动悬架防侧翻控制策略的有效性进行仿真验证.选用干燥沥青路面,路面附着系数设为0.85,初始车速为80 km·h-1,分别利用主动悬架控制、差动制动控制以及集成控制对车辆进行仿真试验.
角阶跃试验工况中,车辆在主动悬架控制、差动制动控制以及集成控制情况下各性能仿真结果对比如图17-19所示.从图17可以看出:未对车辆施加控制时,车身侧倾角在2.0 s后达到了8.4°,7.5 s后维持在7.1°左右;施加控制后,无论是采用集成控制还是主动悬架和差动制动单独控制,车身侧倾角均在2.0 s后明显减小,车辆趋于以较为安全的侧倾角度行驶,但相比其他2种控制方法,集成控制下的车身侧倾角减小的幅度更大,始终维持在6.0°以内,曲线的波动幅度也较小.从图18、19可以看出:集成控制下,车辆横摆角速度在1.5 s后控制在40 (°)·s-1以内,质心侧偏角(绝对值)也大幅度减小,从-7.5°变到了-3.7°,5.5 s后车辆达到了较为平稳的状态,而由主动悬架和差动制动单独控制时,横摆角速度和质心侧偏角的减小幅度并没有集成控制明显.

图17 角阶跃工况车身侧倾角对比图

图18 角阶跃工况横摆角速度对比图

图19 角阶跃工况质心侧偏角对比图
5 结 论
1) 基于主动悬架及差动制动的工作原理,提出微型客车主动防侧翻下层控制策略,分别建立以车身侧倾角为反馈的主动悬架防侧翻控制器,以横摆角速度和质心侧偏角为反馈差动制动防侧翻控制策略.
2) 提出防侧翻集成控制策略,上层协调控制器根据横向载荷转移率LTR判断车辆的运行状态,实时选择合适的下层控制子系统,对车辆进行控制.
3) 选取鱼钩试验和角阶跃试验工况,对所提出的防侧翻集成控制策略进行仿真验证.对无控制、主动悬架控制、差动制动控制以及集成控制下车辆的横向载荷转移率、车身侧倾角、侧向加速度、横摆角速度以及质心侧偏角等性能指标进行比较.结果表明:集成控制下车身侧倾角、横摆角速度等运行参数的极值减小的程度更大,曲线波动幅度更小,车辆可以提前进入稳定行驶状态.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
科技创新导报(2021年12期)2021-08-10
科学导报·科学工程与电力(2019年8期)2019-09-10
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
科学与财富(2017年33期)2017-12-19
