
复杂背景下运动目标检测的ViBe改进算法*
2022-03-29 08:55侯宏录
西安工业大学学报 2022年1期
张 萌,侯宏录,苏 炜,涂 柯
(西安工业大学 光电工程学院, 西安 710021)
随着新型武器研究的快速发展,对靶场运动弹丸检测系统也提出了更高的精度要求[1-3]。但是由于靶场环境的复杂性[4],如场景变换、噪声以及鬼影等,使得算法对运动弹丸检测的准确度和完整度受到了影响。
常用的靶场运动目标检测算法有光流法,帧间差分法以及背景减除法[5-6]等。光流法准确性高,但是抗干扰性差。文献[7]对基于结构-纹理分解和建立光照变化模型的改进光流法进行实验分析,发现解决了传统光流法精度低和计算复杂度高等问题,但难以同时兼顾这些优势。文献[8]提出了一种动态背景下光流场分析的运动目标检测算法,构建马尔可夫随机模型的能量函数,获得目标函数能量最小化时的运动前景分割结果,提高了检测精度,然而易将背景中的晃动目标误检为前景目标。帧差法原理简单,检测速度快。文献[9]提出帧间差分融合灰度投影的运动目标检测算法,对三帧差图像的垂直和水平方向的灰度投影曲线进行互相关运算,获得曲线峰值坐标,实现运动目标的检测,增强了前景点的识别率,但是投影曲线峰值过多容易导致误检。文献[10]融合三帧差法和HSV(Hue-Saturation-Value)检测运动目标,能够有效去除阴影,但目标空洞现象明显。背景减除法检测准确且精度高,文献[11]根据连续多帧图像训练混合高斯背景模型,适应动态复杂背景检测,但仍存在大量噪音以及鬼影区域。文献[12]针对高斯混合模型 (Gaussian Mixture Model,GMM) 算法目标检测存在鬼影问题,利用RGB三通道帧间差分法消除鬼影区域,检测过程复杂且噪声问题仍未得到解决。由于以上算法无法同时有效解决抗干扰性以及伪目标等问题,文献[13]提出一种基于背景学习率α的视觉背景提取算法(Visual Background Extractor,ViBe),根据图像背景的变化自适应更新分割阈值,对相机抖动和晃动树枝等有较强的抗干扰性。文献[14] 针对ViBe算法对光照突变适应性差问题,根据Ostu算法获得最佳分割阈值,利用掩码mask更新背景帧,进而提高前景目标检测精度,然而消除鬼影时间较长。文献[15]构建YUV_Color双背景模型,增强提升了目标完整性和加快了鬼影消除速度,却延长了建模时间。文献[16]采用融合改进三帧差分自适应更新ViBe背景模型,检测精度和鬼影现象得到了有效解决,而前景目标内部空洞现象明显,算法过程复杂。
针对ViBe算法在复杂场景下检测精度低以及易出现鬼影的问题,提出一种基于边缘梯度特征的自适应阈值改进算法。根据场景的光线变化调整分割阈值,实时更新准确的背景模型并基于ViBe算法提取前景目标;通过判断前景区域与运动区域之间边缘梯度特征模型的相似度,消除鬼影区域。
1 ViBe算法原理
ViBe[17]算法是一种像素级背景建模方法。该算法具有建模速度快,对简单动态背景具有较强的适应性等特点,包含三个模块:背景初始化、前景检测以及背景更新。
1.1 背景初始化
基于第1帧图像邻域像素点具有空间相似性且不受时间历史性影响的特点,初始化背景模型。为每个像素点x建立N个样本,从该像素点8邻域中随机选取N个像素特征依次填充样本集,所有像素点x的样本集构成初始化背景模型M(x),表达式为
M(x)={Bx(i)|Bx(i)⊂Vx(g)},
(1)
式中:Bx(i)为在像素点x样本集中第i个像素值;i=1,2,…,N;Vx(g)为像素点x的8邻域采样值;g为像素点x的8邻域随机位置。
1.2 前景检测
背景初始化完成后,通过计算待检测像素点与其对应背景模型之间的欧氏距离,并统计小于阈值R的个数CNT.若CNT小于最小匹配阈Smin,表明该像素点与其背景模型不相似,属于前景点,反之属于背景点,判定模型为
F(x)=
(2)
1.3 背景更新
ViBe算法采用基于像素随机选取的保守背景更新策略,保留了像素点在时间和空间上的历史性,提高了算法在动态环境中的鲁棒性。更新流程如下:若当前像素点被检测为背景像素点或者连续多帧被判定为前景点,该像素点则有1/q的概率去更新自己和自身8邻域像素点的背景模型,q为时间采样因子。反之,若该像素点被判定为前景点时,不再更新背景模型。
2 运动目标检测的ViBe改进算法
在光线瞬变的场景中,ViBe算法建立的背景模型也时刻发生变化,若仍采用固定阈值分割前景点与背景点,误检率较高。并且视频首帧中如果存在运动目标,易产生鬼影,导致目标多检,故本文对ViBe算法提出以下改进。
2.1 基于自适应阈值的前景分割
GMM算法通过计算像素点与其在邻域的标准化偏差的匹配度,反映出当前帧图像背景与前一帧图像背景的变化差异,从而自适应更新高斯模型[18]。基于该思想,通过计算待检测像素点x对应的背景复杂度α(x),反映当前背景的亮度变化;比较α(x)与全局阈值s的大小调整参数R,获得更精确的分割阈值,同时实时更新更准确的背景模型。
(3)

(4)
式中:R0为全局分割阈值;s为衡量背景复杂度的全局阈值;∂为阈值调整参数。
2.2 基于梯度特征模型的鬼影消除
目标形状边缘是反映感兴趣目标的一种重要特征,通过建立图像中前景区域与其对应原图运动区域的边缘特征模型,并比较两个模型的相似性,可以筛选出鬼影区域并消除。
2.2.1 边缘梯度特征模型的建立
边缘梯度直方图特征是在边缘检测理论基础上提出的一种形状边缘特征的提取方法。相比其他梯度边缘检测算法,Canny算子[19-20]抗噪能力强、定位精度高。本文采用该算子建立特征模型过程为
(5)
(6)
(7)
式中:gx(x,y)和gy(x,y)分别为该图像的水平梯度和垂直梯度;θ(x,y)为梯度方向;f(x,y)为像素点(x,y)处的邻域图像;Sx(w,v)和Sy(w,v)分别为水平和垂直方向模板,其式为
(8)
(9)
将gx(x,y)和gy(x,y)进行直方图统计并归一化处理,完成特征模型的建立P和Q,其式为
(10)
式中:n为图像中前景区域的个数;P为前景区域特征模型;X为存储归一化参数xi*的向量,Q为原图运动区域特征模型;Y为存储归一化参数yi*的向量。
2.2.2 鬼影消除
通过计算向量X和向量Y的Tanimoto系数[21]来判断向量X和向量Y的相似度,进而反映前景区域特征模型Pi和原图对应运动区域特征模型Qi之间的相似程度,两向量之间的Tanimoto系数Ti(Xi,Yi)为
(11)
Ti(Xi,Yi)越接近1,说明向量Xi与向量Yi相似程度越高,进而反映特征模型Pi与特征模型Qi的相似性越高;反之,其值越接近0,说明Pi和Qi的相似性越低。
当Ti(Xi,Yi)大于等于Tanimoto系数阈值T0,则判断该前景区域为鬼影区域,将该区域内的所有像素点值置零;反之,则保持该区域内所有像素点值不变。
3 运动目标检测算法分析
为了验证算法的有效性,根据复杂背景下运动目标检测算法常受相机抖动,树枝扰动以及鬼影等问题干扰,采集三类不同场景视频序列,使用改进帧差法和GMM法以及ViBe法与本文的ViBe改进算法进行实验分析,结果如下所述。
3.1 实验结果定性分析
场景1为含有摄像机抖动和强边缘区域的复杂背景视频序列。其中,摄像机在拍摄第27帧时受到强烈晃动,且首帧中存在研究目标,实验结果如图1所示:GMM法检测出的目标较完整,但对抖动和强边缘产生的噪粒比较敏感且存在多检现象;改进帧差法和ViBe法对噪粒的处理效果比较好,但改进帧差法检测出的目标内部存在空洞并出现了目标丢失现象,ViBe法引入伪目标;最后通过对比视频原图1(a)的检测结果,可以发现 ViBe改进算法在保证目标数量和完整性的同时,几乎滤除了背景中所有的噪粒。

图1 抖动和强边缘区域视频检测结果
场景2为含有树枝扰动的复杂背景视频序列,视频首帧中存在研究目标,随机选择视频第26帧图像,实验结果如图2所示。可知GMM法和ViBe法将扰动树枝误检为前景目标并引入了伪目标;改进帧差法相比前两种算法树枝扰动问题得到了明显改善,但目标边缘不光滑;而ViBe改进算法采用的自适应阈值背景更新模型和鬼影消除策略,实时描述了每帧图像的背景,提高了目标检测的准确性。
场景3为阴雨天拍摄的复杂背景视频序列,首帧中不存在研究目标,随机选择视频第20帧图像,实验结果如图3所示。从图中可以看到,由于雨水对光线的吸收和漫反射,四种算法提取的目标完整性都比较低,改进帧差法效果最差。GMM法和ViBe法将雨滴和扰动树枝误检为前景目标;ViBe改进算法虽然由于漫反射引入了部分噪音,但相比前三种算法,整体检测效果仍然最好。
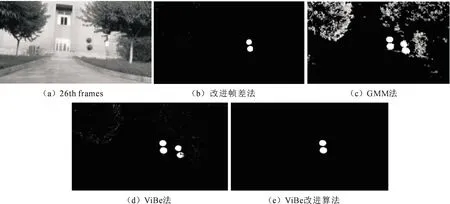
图2 扰动视频检测结果

图3 阴雨天视频检测结果
3.2 实验结果定量分析
为了精确比较以上算法性能,文中采用召回率(Re),精确率(Pre)和调和平均值F1等3个性能评价指标从定量角度对实验结果进行分析。其中,3个指标数值越接近1,表示算法的检测精度和目标完整度越高,指标公式为:
(12)
(13)
(14)
式中:TP为正检为前景像素点的个数;FN为将前景点错检为背景点的个数;FP为将背景点错检为前景点的个数。
4种算法总体性能结果比较见表1~表2。可以发现,文中的改进ViBe算法相比改进帧差法,GMM法以及ViBe法,调和平均值F1在场景1分别提高了13.22%,36.9%,13.83%;在场景2中分别提高了5.59%,41.81%,29.8%;在场景3中分别提高了38.95%,24.44%,22.74%。召回率Re在场景1中分别提高了19.89%,0.82%,3.79%;在场景2中分别提高了2.62%,0.96%,1.94%;在场景3中分别提高了42.7%,7.55%,27.84%。精确率Pre在场景1中分别提高了18.72%,58.8%,32.74%;场景2中分别提高了7.62%,55.43%,42.83%;在场景3中分别提高了34.43%,36.61%,16.56%。验证了文中算法有效抑制了鬼影区域,同时提高了运动目标的检测精度。

表1 改进帧差法和GMM法的性能比较
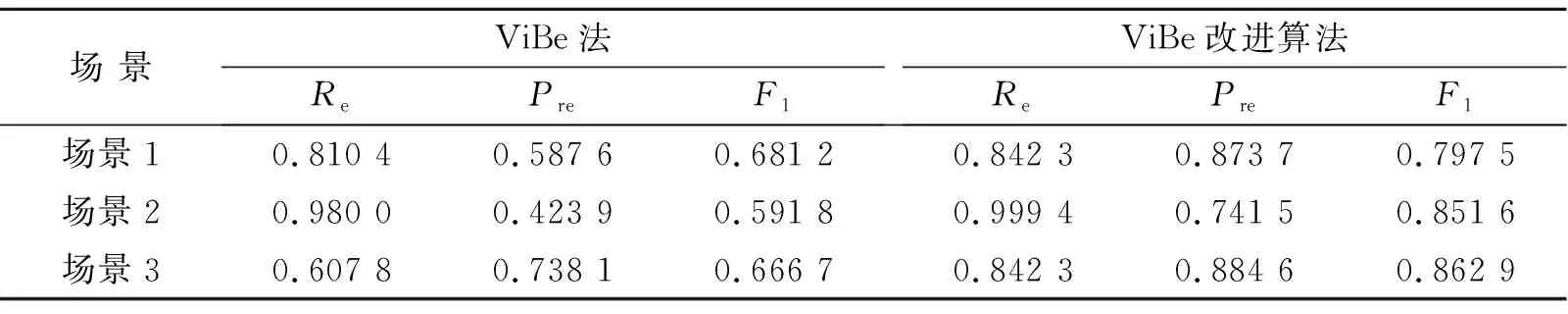
表2 ViBe法和ViBe改进算法的性能比较
F1分数是根据召回率和精确率之间的平衡点定义的新指标,解决这两个矛盾体指标无法达到双高问题,从而更有效评价运动目标检测算法的性能。故为了更直观体现文中算法的优越性,从三个场景视频图像序列中随机选取连续7帧图像进行实验, 采用F1对4种算法的实验结果进行评价。从实验数据图4可以看出,在不同场景中文中算法明显优于前三种算法,验证了文中算法的有效性和适用性。

图4 不同场景中4种算法性能比较
4 结 论
针对传统ViBe算法在复杂背景下抗干扰性差和出现鬼影等问题,提出一种基于边缘梯度特征的自适应阈值改进算法。根据待检测像素点在8邻域范围内像素值的离散度,表示出其背景集的复杂度并进行判断,从而自适应更新分割阈值R并提取前景像素点;建立前景区域与运动区域的边缘梯度模型,通过判断模型之间的相似度,筛选并消除鬼影区域。最后采用改进帧差法、GMM法、ViBe算法以及文中的ViBe改进算法处理3种不同场景的复杂视频序列图像,实验结果表明,文中算法有效抑制了鬼影问题,提升了对相机抖动性、强边缘区域、晃动树枝以及阴雨天的抗干扰性,同时,相比前三种算法,其调和平均值F1提高了23.52%,召回率提高了17.1%,增强了前景目标的检测精度与目标的完整性。下一步将开展运动速度对目标检测结果的影响分析研究,解决暗背景下目标检测的完整性低问题。
猜你喜欢
现代电子技术(2022年11期)2022-06-14
初中生学习指导·中考版(2022年4期)2022-05-12
建材发展导向(2021年19期)2021-12-06
现代计算机(2021年10期)2021-05-28
现代计算机(2021年3期)2021-03-24
当代陕西(2020年14期)2021-01-08
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
