
配电网多太阳能光伏系统分布式协调控制策略
2022-04-22 06:25高冰周文博王正平
电力电容器与无功补偿 2022年2期
高冰,周文博,王正平
(1.国网河北省电力有限公司衡水供电分公司,河北 衡水 053000;2.国网河北省电力有限公司,石家庄 050000)
0 引言
近年来,随着国家大力推进生态环境保护和加强可再生能源发展战略布局,可再生能源在电力系统中的整合应用受到越来越多的关注[1-2]。其中,太阳能光伏发电系统被认为是未来电网最有价值的可再生能源之一[3-4]。但随着光伏发电系统的大量增加与普及,光伏发电系统对配电网的电压控制产生了较大影响[5]。由于光伏发电具有间歇性,其系统的发电量变化较大,容易导致电力系统电压的快速变化[6]。
因此,解决光伏发电中配电系统的电压波动问题是提高配电网电压稳定性的关键因素,也是光伏发电技术的重要研究方向[7]。近年来,针对光伏发电系统中配电网的电压波动问题,众多专家学者开展了大量研究。文献[8]提出了一种以模型为中心的配电网控制策略,能够有效解决光伏并网引起的电压变化问题。文献[9]提出了一种基于灵敏度的优化策略,可减小光伏发电系统高度集成所引起的电压变化。但是上述控制策略均为集中式控制策略,需要有强大的中央控制器来收集全局信息,并处理复杂的优化算法,实际应用较为复杂且灵活性较差。
与集中式方法相比,分布式方法可以实现并行计算,并将通信任务分配到本地控制器之间,具有更高的灵活性、可扩展性,且不受单点故障的影响[10]。文献[11]提出了一种基于两层控制框架的实时自适应控制方法,可有效提高光伏穿透率配电系统的设定点跟踪精度和控制稳定性。但该方法没有考虑PV逆变器之间的无功功率比例分配,可能导致某些PV逆变器之间的无功功率循环。文献[12]提出了一种三级鲁棒控制策略,能够减少能量损失和减小电压偏差,但该方法中只有第3级控制可实现分布式控制,对于第1级和第2级控制方法仍然需要集中式控制器来处理复杂的通信和计算任务,其灵活性和鲁棒性不足。
随着智能体的不断发展,Agent系统逐步被应用到光伏配电网中,文献[13]针对光伏发电并网产生的电压波动问题,结合多Agent技术建立基于多Agent的分布式协同光伏并网发电控制系统,依靠Agent技术特点实现对光伏并网问题的预测和保护,从而确保光伏发电并网安全运行。文献[14]针对分布式电源接入配电网后配电网故障情况变得更加复杂等问题,提出了一种基于多Agent系统的配电网故障处理方法。文献[15]提出了一种基于多Agent的微网分区保护方案,通过将微网划分为若干区域,运用各Agent之间的分布式处理和协作能力实现微网保护。然而,上述研究仅适用于电压变化缓慢的情况,当电压变化过快时Agent分布式控制将受到一定的限制。
针对上述分析,为提高光伏集成配电网的电压稳定性,提出了一种包括下垂控制级和基于Agent分布式递阶控制策略,通过PV逆变器的协调控制来解决配电网的电压波动问题。首先,基于下垂度的初级电平控制,利用局部测量信息快速调节PV逆变器的电压,克服电压的快速变化。其次,基于Agent的次级控制,通过相邻智能Agent之间的分布式通信,确保PV逆变器之间的平均母线电压恢复和无功功率按比例分配。最后,通过构建具有5个住宅太阳能光伏发电系统的配电网络,对本文所提控制策略进行仿真分析,验证所提控制策略的可行性和有效性。
1 住宅光伏发电系统的配置
图1所示为配电网中多个住宅太阳能光伏发电系统的总体系统架构。由图可知,太阳能光伏发电系统通常包括多个光伏电池板阵列、DC-DC转换器、电网接口逆变器、DC链路电容器和集成控制系统,各屋顶光伏阵列所产生的电能通过逆变器汇总传送至配电网中,并进行统一分配管理。
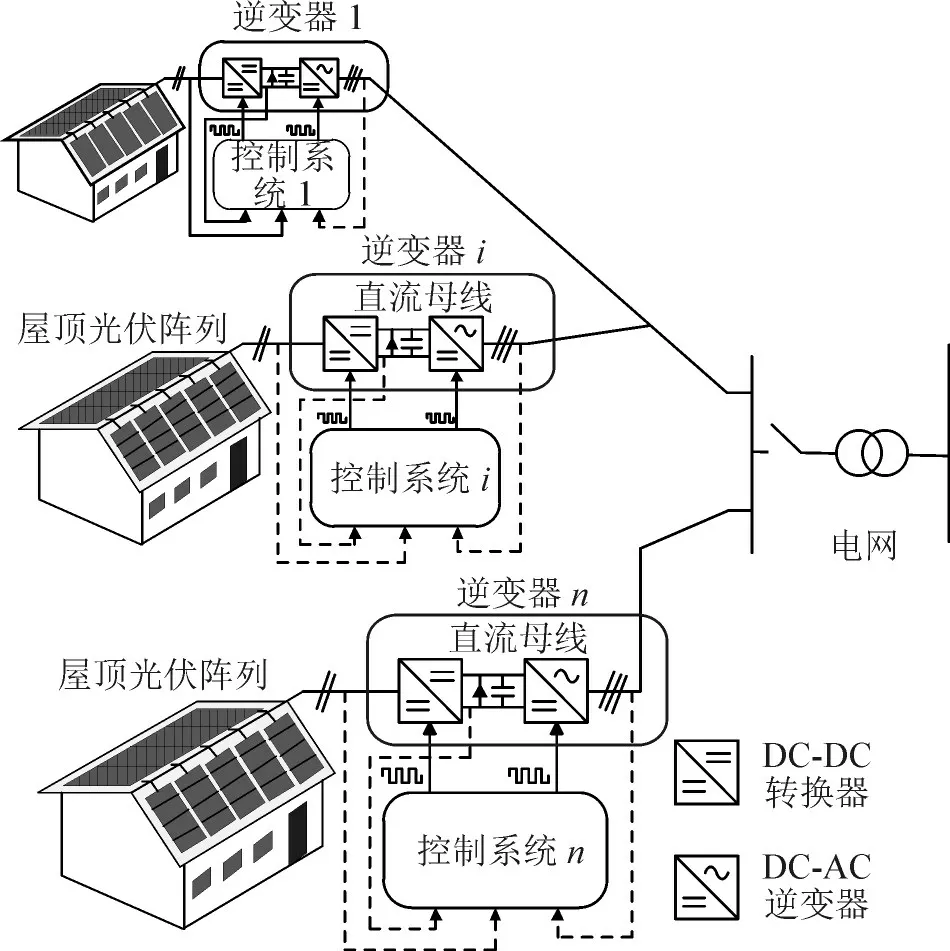
图1 多个住宅太阳能光伏发电系统的系统架构Fig.1 System architecture of multiple residential solar photovoltaic power generation systems
图2 所示为家用太阳能光伏发电系统的系统配置和常规控制方法。由图可知,为了实现PV逆变器的电压控制,需要获取vpv、ipv、vdc、vdcref等必要的系统变量。其中,vpv和ipv表示屋顶光伏阵列输出端的电压和电流;vdc和vdcref表示测量的直流链路电压及其参考值;va、vb、vc和ia、ib、ic分别表示三相电网交流电压和电流,其在d-q域中对应的电压和电流为vd、vq和id、iq;Q和Qref表示光伏系统产生的测量无功功率及其参考值。
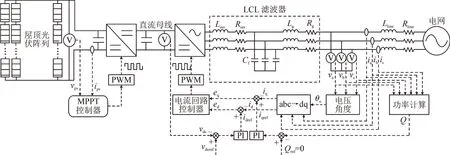
图2 家用太阳能光伏发电系统的常规控制图Fig.2 Conventional control diagram of household solar photovoltaic power generation system
通常,对于传统的PV逆变器控制策略,光伏系统无功发电参考值Qref设置为零。因此,若采用传统的控制策略,PV逆变器将无法处理配电系统中的电压波动问题。此外,PV逆变器的配置容量通常高于光伏发电系统,使得PV逆变器具有灵活的无功支持空间。
2 多太阳能光伏系统的分布式控制策略
为提高光伏集成度配电网的电压稳定性,本文提出了一种分布式递阶控制策略,通过实时调节快速响应PV逆变器的注入或消耗无功功率解决电压波动问题,图3所示为所提出的控制策略的架构。
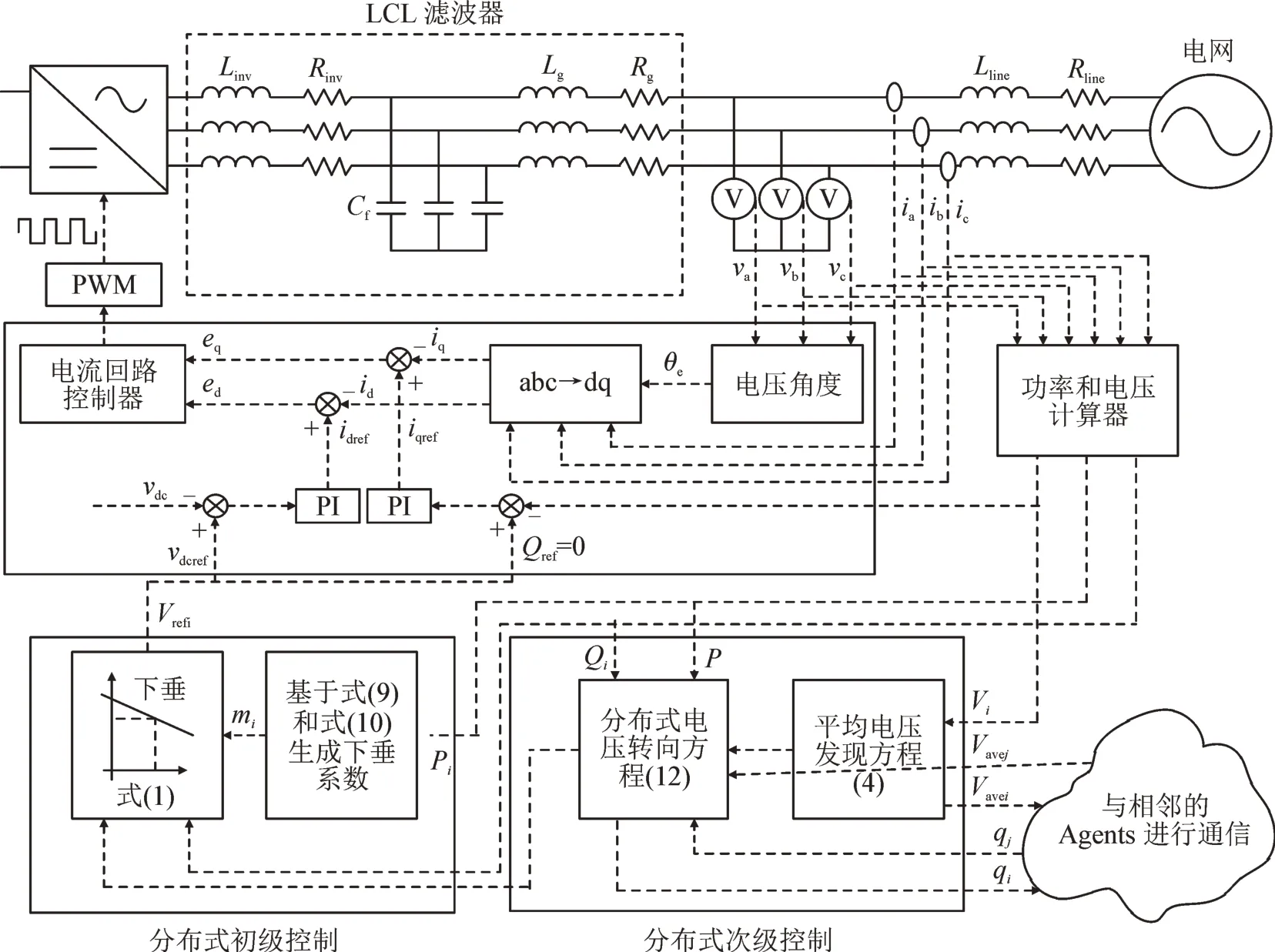
图3 分布式递阶控制策略图Fig.3 Distributed hierarchical control strategy diagram
由图3可知,所提出的控制策略是在传统的内部控制回路基础上增加了一个基于下垂度的分布式初级控制回路,以及一个基于Agent的分布式次级控制回路。其中,分布式初级控制回路中,利用分布式的初级电压和无功功率下降控制策略,通过局部测量信息调节PV逆变器的电压,克服电压的过快变化;分布式次级控制回路中,利用分布式次级电压无功协调控制方法,保证PV逆变器之间的平均母线电压恢复和无功功率按比例分配。
2.1 分布式初级电压和无功功率下降控制
为解决变负荷需求和光伏发电引起的配电系统电压快速变化问题,在初级控制中采用局部无功电压压降法,利用无功功率实时调节PV逆变器的电压。其中,第i个PV逆变器的无功电压降函数如式(1)所示。

式中:i为PV逆变器指标;Vnom为交流配电系统的标称电压;Vrefi为逆变器的输出电压参考值,该参考值被用作本地电压控制回路的指令;mi、Qi分别为无功功率-电压下降系数和本地测得的无功功率;ΔVi为一个附加的调节项。
应该注意的是基于下垂的初级控制可以仅利用本地信息来调节PV逆变器的输出电压,这也意味着其中不需要任何通信。然而,基于下垂的控制方法不能保证PV逆变器之间的比例无功共享。为了解决这个问题,提出了分布式次级电压和无功功率协调控制算法。通过分布式调节式(1)中的附加项ΔUi,所提出的次级控制可以克服常规下垂控制的缺点,即稳态偏差和不正确的无功功率分配。
2.2 分布式次级电压与无功协调控制
为解决基于下垂的初级控制策略的缺点,提出了分布式次级电压和无功协调控制策略的目标:第一,将配电系统的平均母线电压恢复到其标称值Vnom;第二,确保PV逆变器之间的准确无功功率分配与功率额定值成比例。
与传统的基于下垂方法不同,所提连续时间分布的次级控制算法旨在恢复平均母线电压并确保按比例分配负载,以产生附加的调节项ΔVi。将式(1)进行微分可得到ΔVi的导出函数如式(2)所示。

式中,Vrefi的数学表达如式(3)所示。

式中:Vavei为第i个PV逆变器的平均母线电压;kV表示调整恢复平均母线电压的收敛速度的因子。
由式(3)可知,如果微分项Vrefi在稳态下收敛为零,则PV逆变器的平均母线电压将恢复到其标称值Vnom。
由此,根据动态共识算法[12],设计了分布式平均母线电压发现算法,如式(4)所示。

式中:Vi为第i个PV逆变器的本地测量输出电压;c>0为调节平均母线电压发现收敛速度的积分因子;aij为第i个Agent与第j个Agent之间的信息交换系数;Ni为第i个Agent包含邻居的索引集。其中,信息交换系数aij如式(5)所示。
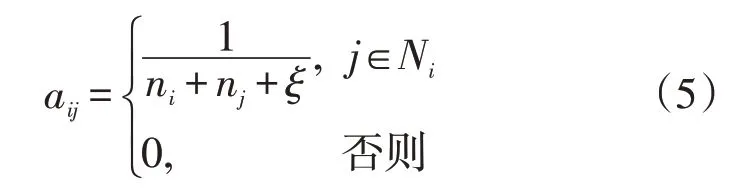
式中:ni和nj分别为第i个Agent和第j个Agent的邻居总数;ξ为两个Agent之间的互相关性,取值范围为[0,1]。通常,初级下降控制的响应速度比次级控制策略快,由此可知Vi≈Vrefi,同时V i≈Vrefi。
考虑Vi≈Vrefi,将式(3)代入式(4)的微分方程,可推导出如式(6)所示的微分方程为

为满足第2个目标,确保与PV逆变器的额定功率成比例地准确无功功率共享,提出了式(7)所示设计方程。

式中:kQ>0为调节比例无功功率分配收敛速度的因子;qi为无功功率利用率。
由(7)可知,若在稳定状态下,微分项mi·Q i收敛为零,则每个PV逆变器的无功功率利用率将收敛到相同的值。
其次,为了确保PV逆变器在稳态下与额定功率成比例地准确分配无功功率,将式(7)中的无功利用率qi定义为式(8)所示。

式中,Qcapi为可用无功功率容量。
通常,PV逆变器的最大视在功率容量是恒定的,可通过式(9)计算得到。

式中,S和P分别表示第i个PV逆变器的最大视在功率容量和测得的输出有功功率。
此外,为了快速正确地调节PV逆变器的电压,将式(1)中的无功-电压下降系数mi定义为式(10)所示。

式中,ΔEmax>0为PV逆变器的最大允许输出电压波动。
将式(8)和式(10)代入式(7),得出qi的导数,如式(11)所示。

最后,基于上述设计过程,将式(3)和式(7)代入式(2),得出附加电压转换项ΔVi的数学表达如式(12)所示。

3 分布式控制策略收敛性及算法
3.1 分布式次级控制的收敛性
为验证所提分布式次级控制的收敛性,定义Lyapunov函数如式(13)所示。

其中,J的时间导数如式(14)所示。

根据信息交换系数a i,j的定义可知,ai,j=a j,i。因此将式(6)、(11)代入式(14),可以得出式(15)所示等式。
由于Lyapunov函数J是全局正定的,而函数的时间导数是全局负定的,由此可知所提出的分布式控制策略是渐近稳定的。此外,在稳态下函数的时间导数将收敛为零,因此式(15)中的次级项将收敛到零,其稳定状态如式(16)、式(17)所示。

由式(16)和式(17)可以得出,无功功率将根据无功功率容量成比例地分配,且配电网的平均交流电压将同时收敛到标称值。
3.2 算法实现
通常,在具有较大时标的控制或优化方法中,会考虑光伏的不确定性,而对于具有快速响应的实时控制和优化方法,光伏的不确定性通常未被考虑。本文提出的方法是一种实时控制方法,能够快速补偿光伏发电的不确定性。
图4所示为分布式协调控制策略的实现架构图。由图可知,为实现配电网系统分布式控制,每个PV逆变器均配备了可以与其相邻通信的Agent,每个Agent都能采样其本地PV逆变器的信息,通过与相邻Agent进行通信来交换本地信息,并通过执行来生成初级控制器的电压校正项。
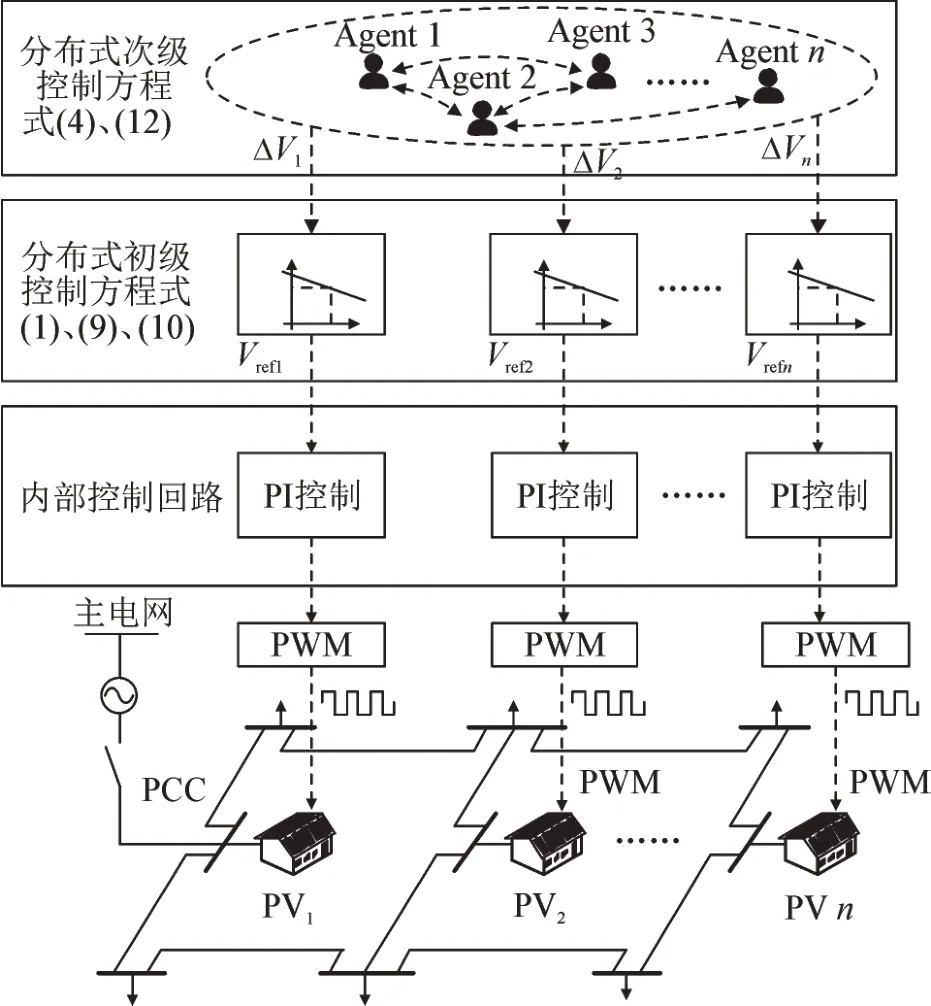
图4 本文提出的控制策略的实现架构Fig.4 Implementation architecture of the control strategy proposed in this paper
所提分布式策略中,初级下降控制器、内环电压和电流控制器具有较快的响应速度,时间范围约为10 ms,对于次级控制器,响应速度低于初级控制器,其时标约为0.1 s。因此为了在初级和次级控制器之间进行协作,将采样和通信间隔设置为10 ms,以权衡Agent的通信负担和次级控制器的响应速度。
为提高控制策略的性能,针对通信链路故障的鲁棒性,提出以下设计规则。首先,将Agent的通信拓扑设计为在失去任何一条通信链接的情况下,分布式控制策略仍然可以正常工作。其次,每个Agent定期向其所有邻居发送心跳数据包(包括时间戳和工作状态信息)从而确认多个Agent是否连接正常,并在通信拓扑变化的情况下更新ai,j信息。根据上述2个设计规则,每个Agent均可获取有关邻居Agent的可用和可达信息,有助于处理通信故障或拓扑更改的情况。此外,本文所提控制策略中基于下垂的初级控制仅依赖于本地信息,且不需要任何通信,在极端通信延迟或故障的情况下,所提控制策略将退化为下垂控制。因此,在出现严重的通信延迟或故障的情况下,所提分布式控制策略仍然可以保证系统的稳定性和初级电压调节。
4 实验结果与分析
在Matlab/Simulink中,构建具有5个住宅太阳能光伏发电系统的配电网,对图4所示的控制策略进行仿真验证。其中,配电网络传输线的阻抗设置为r=0.235Ω/km和x=0.073Ω/km,传输线长度见图5。每个住宅太阳能光伏发电系统都配有智能Agent,可通过与其对应的邻居交换数据来实现所提控制算法。如图5所示,住宅太阳能光伏发电系统中PV逆变器的最大视在功率容量分别为18、24、36、48、30 kVA,逆变器输出电压的标称值Vnom设置为400 V,PV逆变器的最大允许输出电压波动ΔEmax设置为50 V。同时,将控制参数c,kV和kQ用作积分器的增益,其值分别设置为20、10和200,并可应用比例积分(PI)控制器调整这些参数。
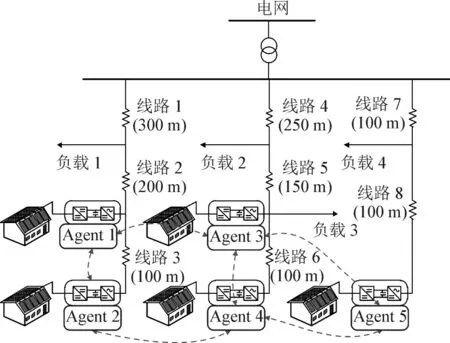
图5 具有多个住宅太阳能光伏发电系统的配电网Fig.5 Distribution network with multiple residential solar photovoltaic power generation systems
4.1 验证分布式平均母线电压发现算法
分布式平均母线电压发现算法在所提分布式控制策略中起着重要作用,其主要用于生成附加电压转向项δVi。因此,首先对分布式平均母线电压发现算法的收敛性进行测试,其中将发现的Agent平均母线电压设置为本地测量的输出电压,分别为388.62、389.29、389.96、391.29、387.01 V,结果见图6。由图可知,在t=2 s时刻前,未应用平均母线电压发现算法;在t=2 s时刻,启用平均母线电压发现算法,且每个Agent的平均母线电压收敛到实际平均值具有短暂的瞬态过程。
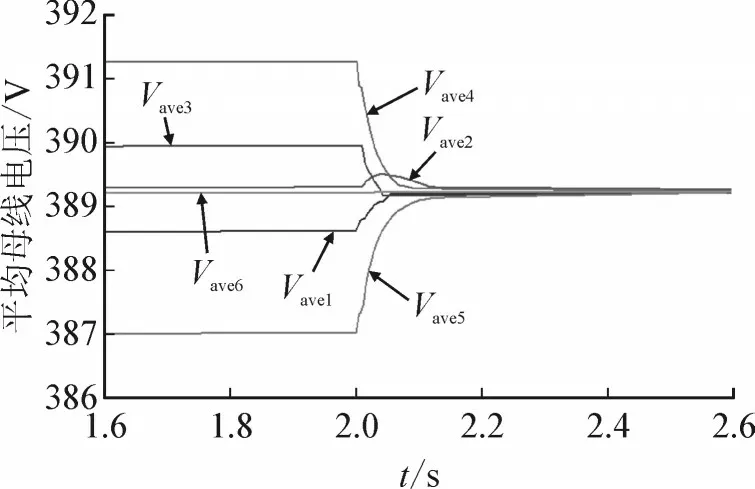
图6 分布式平均母线电压发现算法的收敛性检验Fig.6 Convergence test of the distributed average bus voltage discovery algorithm
4.2 性能比较
选取集中式控制策略与自适应控制策略两种常规控制策略与本文所提分布式控制策略进行综合性能比较,其具体方案设置见表1。
表1 两种控制策略综合性能比较参数Table 1 Comprehensive performance comparison parameters of two control strategies
如表1所示,在t=4 s之前,将每个PV逆变器的无功功率设置为0,且设置平均母线电压不受控制,配电网的总负载需求为70 kW、28 kvar,主电网保持电力平衡;在t=4 s之后,启用所提电压控制策略;在t=8 s时,总负载需求从70 kW、28 kvar降低到50 kW、7 kvar;在t=12 s时,总负载需求恢复至70 kW、28 kvar。
图7为3种控制策略性能比较结果。图7(a)为本文所提控制策略仿真结果;图7(b)为集中式控制策略仿真结果;图7(c)为自适应控制策略仿真结果。由图7(a)所示结果可知,在执行分布式控制策略前,即t=4 s时刻之前,平均母线电压为389.23 V,小于标称值400 V,每个PV逆变器的输出无功功率为0;在t=4 s之后,启用本文所提分布式控制策略,配电网络的平均母线电压恢复到其标称值400 V,并正确分配了每个PV逆变器的无功功率为配电网络提供无功功率补偿。
相比分布式控制策略,集中式控制策略需要中央控制器与所有PV逆变器进行通信,在每个通信间隔中,中央控制器基于集中通信向所有PV逆变器分配平均母线电压和比例无功功率参考指令。随后每个PV逆变器的本地控制器都可以满足从中央控制器获取的正确指令来恢复平均母线电压和按比例分配无功功率的要求,如图7(b)所示。
将本文所提分布式控制策略仿真结果与集中式控制策略仿真结果比较可知,对于本文提出的控制方法,集中式控制策略可收敛到相同的稳态结果,且集中式控制策略的瞬态性能略优于分布式控制策略,即过冲较低,如图7(a)和图7(b)的无功利用率局部放大图。另外,就单点故障的耐受性而言,因为本文提出的控制策略中Agent采用的是分布式控制,当其中某一个Agent发生故障时,不会造成整个系统瘫痪。相比之下,在集中式控制系统中,当某一个Agent出现故障时将直接影响整个系统。因此总的来说两种控制策略下,集中式控制策略具有更好的暂态性能,但分布式控制策略具有更好的单点故障耐受性,且具有较高的灵活度。
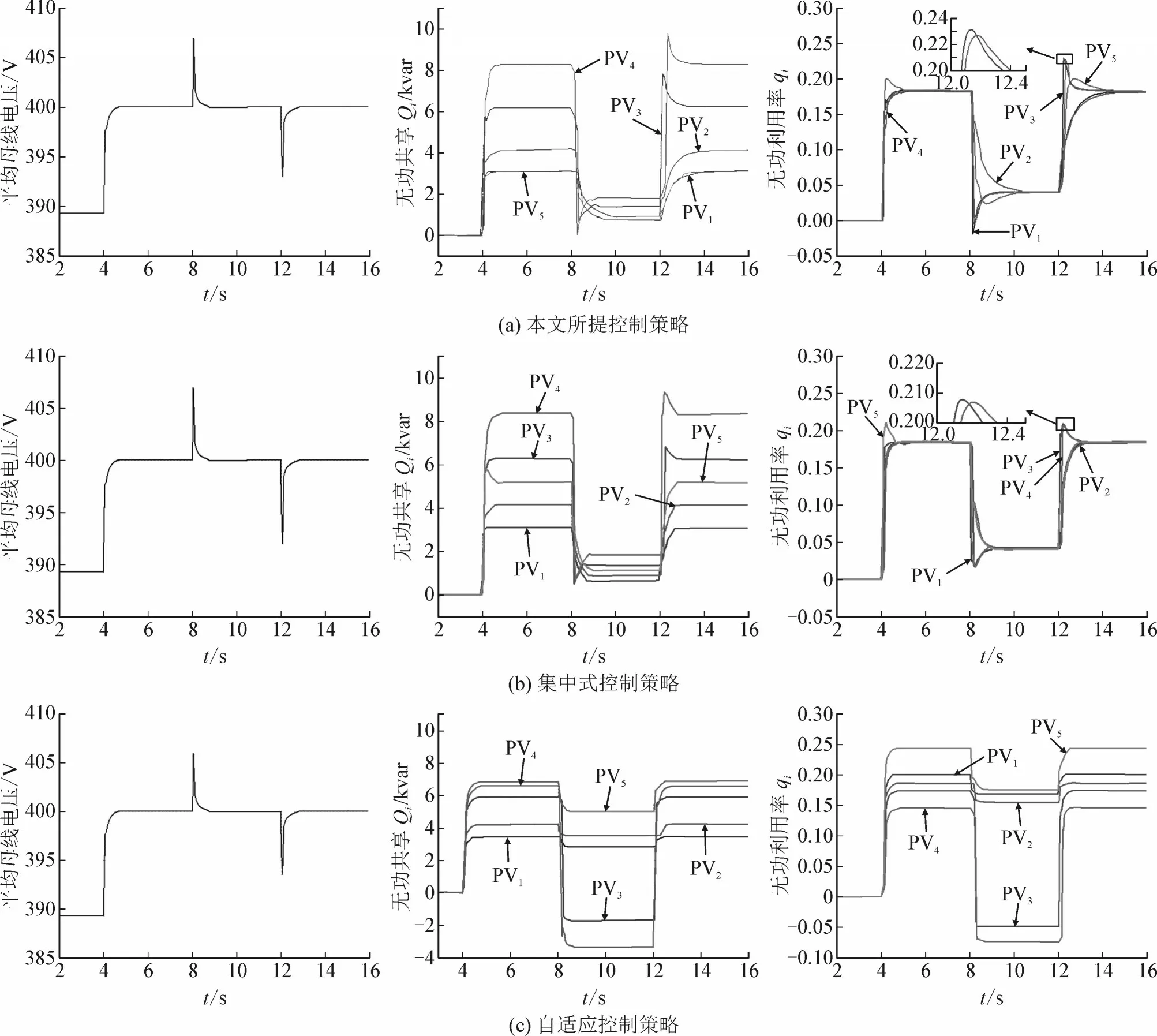
图7 3种控制策略性能比较结果Fig.7 Performance comparison results of three control strategies
由图7(c)所示的自适应控制策略仿真结果可知,该控制策略尽管可以在稳态下恢复平均母线电压,但不能保证比例无功功率分配。从图中可以看出,在t=8~12 s时刻内,一部分PV逆变器产生正无功功率,而另一部分PV逆变器产生负无功功率。由于该策略未考虑比例无功功率共享的目的,则自适应控制策略将可能导致PV逆变器之间的无功循环,并由此增加功率损耗。因此与自适应控制策略相比,本文所提分布式控制策略具有保证比例无功功率共享的优势。
4.3 负载变化较大时的性能评估
为能够在负载变化较大的情况下验证所提分布式控制策略的性能,设置如表2所示的仿真验证场景。
表2 仿真验证场景参数Table 2 Simulation verification scenario parameters
如表2所示,在t=16 s时,总负载需求从70 kW、28 kvar增加到220 kW、160 kvar;在t=20 s时,总负载需求恢复到70 kW、28 kvar。
为防止PV逆变器超过额定容量,采用如下技术方法。首先,在PV逆变器的本地电压和电流环路控制中,使用限流方法;其次,在PV逆变器的初级回路和次级回路控制中,若PV逆变器达到最大容量,将禁用式(12)中所示的积分操作,当光伏逆变器具有足够容量时,则再次启用积分操作以更新积分器的值。
图8所示为本文所提分布式控制策略的性能测试结果。由图可知,在负载需求较大时,即t=16~20 s时刻之间,每个PV逆变器均会根据负载容量产生最大无功功率。由于容量的限制,PV逆变器禁用了平均母线电压恢复功能。因此在t=16~20 s时刻期间,平均母线电压不同于其标称值,且母线电压由主电网维持。在t=20 s时刻之后降低负载时,平均母线电压恢复到其标称值,且可通过短期瞬态过程按比例重新分配PV逆变器的无功功率。由此可知,即使在负载变化较大的情况下,本文所提分布式控制策略同样具有良好的时效性和稳定性。
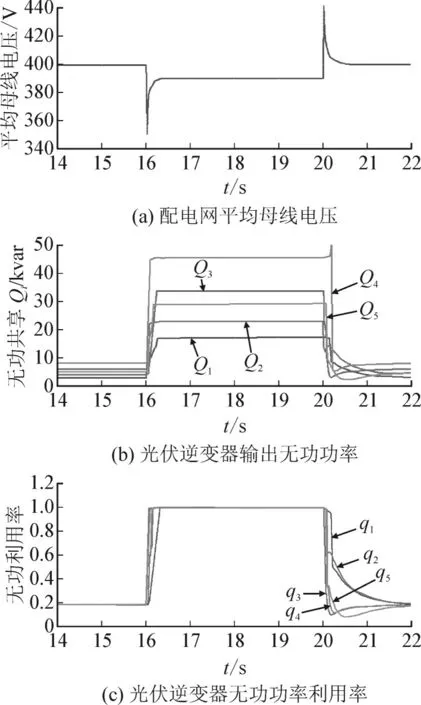
图8 负载变化下协调控制策略性能测试Fig.8 Performance test of coordinated control strategy under load variation
4.4 光伏有功功率变化情况下的性能评估
由于PV逆变器的有功功率取决于辐照度和温度,但辐照度和温度是随机变化的。因此,为验证所提分布式控制策略在PV有功功率发生变化情况下的性能,表3所示为仿真方案具体参数。
表3 仿真方案具体参数Table 3 Specific parameters of the simulation scheme k W
如表3所示,在t=24 s时,PV逆变器输出的有功功率P1、P2、P3、P4、P5从6、8、12、16、10 kW分别增加到9、12、18、24、15 kW;在t=28 s时,将其分别减少至P1=3 kW、P2=4 kW、P3=6 kW、P4=8 kW、P5=5 kW。
图9所示为在光伏有功功率变化的情况下本文所提分布式控制策略的性能测试结果。由图9(a)可知,在暂态过程中由于光伏系统有功发电量的增加与减少,平均母线电压分别在t=24 s升高和t=28 s时降低。采用本文所提控制策略在所有时变有功功率产生条件下,平均母线电压都可以恢复到其标称值。由图9(c)可知,在t=24~28 s期间,有高功率有功功率输出时,减小了可用无功功率容量,且降低了下垂系数,PV逆变器输出的无功功率减小。反之亦然,在t=28~32 s内,PV逆变器的输出无功功率随着有功功率输出的降低而增加。此外,在所有随时间变化的有功发电条件下,可通过合理的短期暂态过程按比例分配PV逆变器的无功功率。因此由上述分析可知,在时变有功功率输出条件下,本文所提分布式控制策略仍具有良好的时效性。
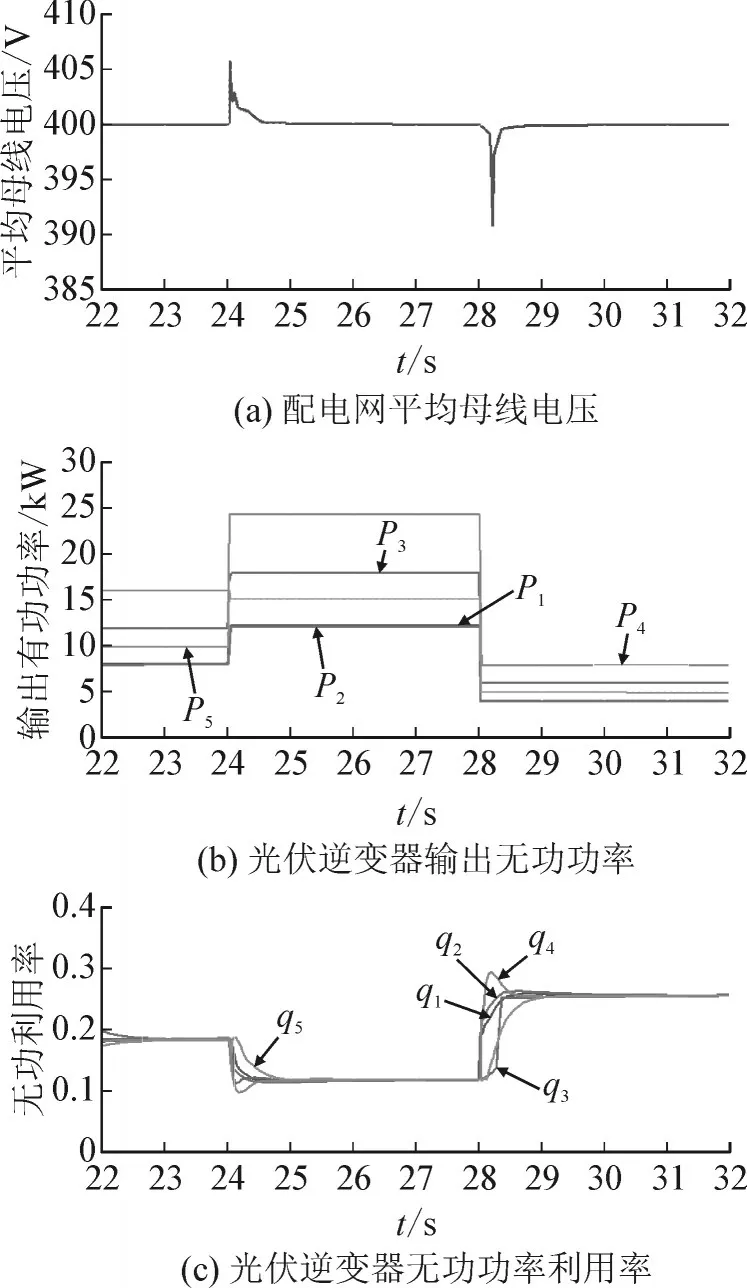
图9 功率变化下控制策略性能测试Fig.9 Performance test of control strategy under power variation
4.5 丢失Agent 2情况下的稳态性评估
为验证本文所提控制策略在Agent丢失情况下的性能,对仿真方案做方案设置如下:
1)在t=32 s时刻,Agent 2丢失。
2)在t=36 s时刻,恢复Agent 2。
图10所示为本文所提分布式控制策略在失去Agent 2的情况下的鲁棒性测试结果。由图可知,在t=32 s之前,平均母线电压已经恢复到其标称值和无功功率,且PV逆变器已正确调度。由于多Agent系统的通信拓扑与Agent 2丢失有关,且在丢失代理2的情况下,可以基于Agent之间周期性更新的心跳包,根据式(5)更新信息交换系数aij。另外,当Agent 2丢失时,其对应的PV逆变器的无功功率参考指令设置为0,其发现的平均母线电压设置为本地输出电压。由此可知,当Agent 2丢失时,平均母线电压可以恢复到其标称值,且还可通过允许的短期瞬态过程按比例分配PV逆变器的无功功率。因此,由上述分析可知,本文所提出分布式控制策略对代理损失具有良好的鲁棒性。
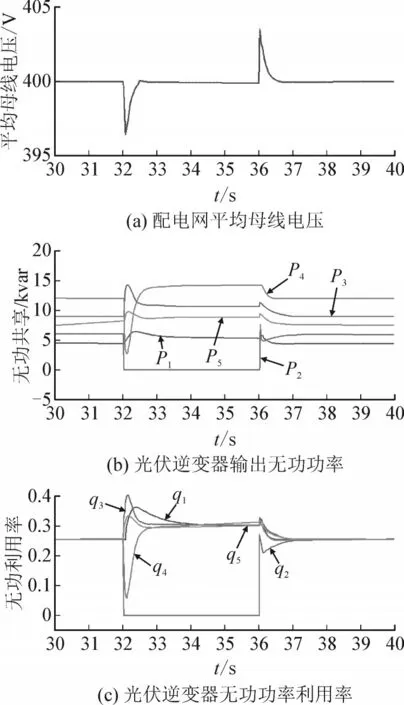
图10 丢失Agent 2情况下控制策略性能测试Fig.10 Performance test of control strategy in loss of Agent 2
4.6 失去所有Agent时的稳健性评估
为了进一步验证本文所提分布式控制策略的鲁棒性,对丢失所有Agent的极端情况进行仿真测试,并设置如下仿真验证场景:
1)在t=40 s时,丢失所有Agent。
2)在t=44 s时,所有Agent恢复。
在丢失所有Agent的情况下,本文所提出分布式控制策略的鲁棒性测试结果见图11。由图可知,本文所提分布式控制策略中,基于下垂的初级控制仅依赖于本地信息,不需要任何通信,在丢失所有Agent的极端故障情况下,本文的控制策略将退化为下降控制。因此在失去所有Agent的期间,即t=40~44 s时刻期间,基于本地初级下垂控制来调节PV逆变器的无功功率。如图11所示,在t=40~44 s期间,配电系统的平均母线电压在稳定状态下仍偏离其标称值,且由于下垂特性无法保证PV逆变器之间的比例无功功率分配。但在t=44 s时刻,即恢复Agent后,平均母线电压又恢复到其标称值,且还可通过允许的短期暂态过程,按比例分配PV逆变器的无功功率。由此可知,在失去所有Agent的极端情况下,所提控制策略仍然可以保证系统的稳定性和初级电压调节,表明所提分布式控制策略具有良好的鲁棒性。
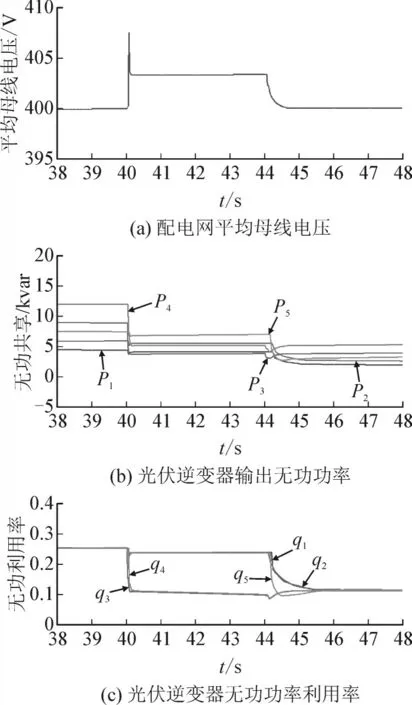
图11 丢失所有Agent情况下控制策略性能测试Fig.11 Performance test of control strategy in loss of all Agents
5 结语
针对配电网中光伏系统大量增加所引起的配电系统电压快速变化问题,提出了一种针对多住宅太阳能光伏系统的分布式递阶控制策略,并通过仿真实验与对比分析得出以下结论:
1)本文所提控制策略即使在大负载变化情况、时变有功功率输出条件下,具有良好的时效性和稳定性。
2)本文所提控制策略在失去部分Agent或失去所有Agent的极端情况下,具有良好的系统稳定性和初级电压调节性,并具有良好的鲁棒性。
猜你喜欢
科学与财富(2021年35期)2021-05-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
中国纤检(2016年10期)2016-12-13
中国医药科学(2016年9期)2016-07-25
现代经济信息(2016年4期)2016-06-20
中国当代医药(2015年25期)2015-10-21
卫星电视与宽带多媒体(2009年17期)2009-10-13
农家顾问(2009年7期)2009-08-14
