城镇立面改造项目测绘的新技术应用实践
2022-05-09 02:08李照永侯至群何江龙
城市勘测 2022年2期
李照永,侯至群,何江龙
(昆明市城市地下空间规划管理办公室,云南 昆明 650041)
1 引 言
2 原理及关键技术
Pegasus:Backpack移动背包扫描系统是徕卡测量系统发布的全新移动实景测量背包,它集成了定位定姿系统和数据采集系统。配置了5个相机和2个激光扫描仪,结合了GNSS技术、惯导技术(INS)和实时定位与地图构建(SLAM)技术[1],具备真正意义上的融合导航定位功能。其中GNSS可接收目前全球可用的四大卫星系统导航定位信号,IMU可修正在背负获取数据过程中的身体晃动姿态误差,SLAM会对在采集过程中无GNSS或GNSS信号弱的环境的轨迹进行优化,可使用于各种复杂导航定位需求环境[1]。“水平+垂直”双激光扫描仪能实现全方位、无接触、快速、高精度地对建筑物或其他实体目标进行三维彩色点云数据的采集[3]。
2.1 INS技术
惯性导航系统(Inertial Navigation System),即INS技术,是一种利用陀螺和加速度计测量载体角运动和线运动,经过积分运算求出载体瞬时姿态、速度和位置的导航技术。它完全依靠自身的敏感器件完成导航任务,无须依赖任何外界信息,也不向外辐射任何能量,是一种完全自主的导航系统,具有数据更新率高、短期精度高和稳定性好的特点。惯性导航体系归于推算导航方法,即从一已知点的方位依据接连测得的运动体航向角和速度推算出其下一点的方位,因而可接连测出运动体的当前方位[11]。
2.2 SLAM技术
SLAM技术(Simultaneous Location and Mapping)是一种在测量环境的同时获取在该环境中位置信息的方法,实现了在无GPS信号的环境下进行位置测量,将它与移动测量相结合实现了各种复杂环境下地理信息数据的获取[11]。SLAM技术无须初始化,开机后可由操作员背载采集设备在测区范围内进行扫描,大大提升了点云处理的效率。所以基于实时定位与地图构建的移动测量技术具有扫描效率高,数据精度高的特点[11]。SLAM技术的理论模型如图1所示。
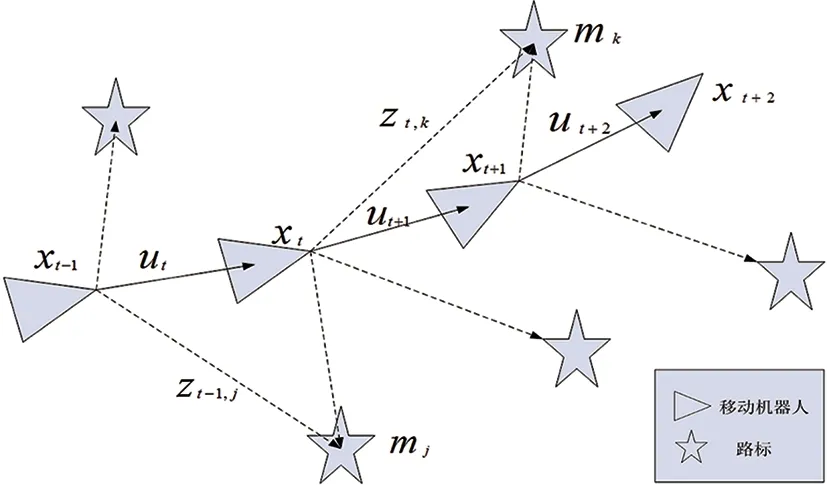
图1 SLAM理论模型
3 数据获取与处理
3.1 项目概述
本次应用研究的目的是为某县城立面改造区提供精细的立面基础数据,满足旧城立面改造设计需求。测区分布于峡谷地带,呈带状分布,是典型的喀斯特地貌。城镇楼宇多建于山坡,街道狭窄,建筑物间距窄小,且树木遮挡严重,通视条件差。这样的客观环境下,传统作业方式和一般架站式三维激光扫描仪实测困难,难以满足旧城立面改造项目数据需求。测区范围示意如图2所示:

图2 测区范围示意图
3.2 数据获取方案设计与准备
根据项目立面改造设计的具体要求收集相关资料,并到实地去勘察测量现场,了解测区计划轨迹路线的沿线对空条件,分析轨迹路线不同对空条件下的数据获取模式和方法,计划采用的方法和基准站设置位置等,房屋的平面位置定位、门、窗台等关键要素应在路线规划范围内能完整获取,并以扫描盲区最少为原则确定合理的最终移动背包扫描路线轨迹,制定数据扫描和处理方案[3]。
(1)在控制点上架设基准站并进行静态观测,其中基站距离测区最远不宜超过 5 km,但条件不具备时可通过增设基站数量的方法进行优化。GNSS接收机采样间隔需为1秒,基站须为多星座系统,并使基站和测区整体走向相对垂直,保持坚强的几何图形结构。此外,基站采集时间必须完全覆盖背包任务的采集时间[9],且宜架设在已知WGS-84准确经纬度的控制点上[3]。
(2)选择采集区域内对空条件良好位置进行设备的静态和动态初始化。将背包放置在平地上,设备主机和控制平板开机,打开平板中的Redmin Viewer远程桌面软件进行传感器及系统激活;检查控制软件参数设置及参数变化情况至完成初始化与系统调试[1]。
创业教育在促进创业意愿和帮助有创业精神的公民进一步发展方面发挥了重要作用。Asliza et al.(2016)针对农业企业家教育,从农业这个角度出发,旨在探讨农业创业教育对马来西亚农业学生的创业倾向和创业意向的影响,结果初步表明地方高校提供的农业创业教育对学生创业技能和创业意向的培养有充分的促进作用,深刻揭示了创业教育的重要性。
3.3 数据获取
数据获取主要包括:静态校准、动态校准、获取数据与下载,工作流程为:静态校准→动态校准→获取数据→动态校准→静态校准→数据整理下载[1]。
(1)静态校准。在设计点位进行设备系统安置,结合点位的GNSS观测环境要求及实地条件确定校准时间长度,通常不少于5分钟,本次实践项目地处低洼山谷地区,观测条件一般,选择平均校准时间为20分钟,每个位置再依据点位情况将观测时间适当延长。此部分工作类似GNSS静态相对定位数据的获取,数据质量与点位选择有着至关重要的联系。
(2)动态校准。在系统完成静态校准后,缓慢背起背包进行动态校准初始化,即惯性导航纠正。背起背包后不能转身,直接快速走直线至INS status(IMU激活的状态)为INS Aligning后开始以顺时针或逆时针方向走方形,每走1分钟停5秒,然后变换绕行方向,当INS status为INS Good状态时,动态校准工作完成。此时,还可适当延长动态校准时间,进一步修正和提高惯性导航的精度。
(3)获取数据与下载
由于背包系统的背负载体为技术人员,载体的姿态相对稳定程度、实时观察路径环境并控制行走速度、依据控制程序参数变化情况适时做零速校正都较为关键,也是决定获取数据质量的关键因素。本次应用实践采用fused SLAM方法模式[3],主要过程为:对空条件较好的起始位置Start REC→一般对空条件缓慢行走→对空条件较差或室内无GNSS信号时在两端处分别做零速校正,校正的时间依据GNSS系统与IMU实时的匹配精度做参考→对空条件较好的起始位置Stop REC→分轨迹获取起点……→Deavtivate[4]。
数据获取完成后应及时完整地将项目文件内全部数据下载,包括背包系统数据及基准站数据下载[4]。
3.4 数据处理
数据处理主要包括:拷贝原始扫描数据、添加基站数据、解算模式与参数设置、轨迹解算、SLAM解算与轨迹优化、点云生成及成果输出等[1]。
(1)数据添加与预处理。首先采用GNSS配套数据处理软件将基站静态观测历元数据进行格式转换,导出通用格式数据(Rinex 3.0及以上),并拷贝至背包系统获取数据工程文件目录。其次采用Inertial Explorer软件将基站数据和背包POS数据等进行转换成Pegasus Manager软件可识别数据格式[10],并对必要解算条件进行检查。
(2)轨迹解算。轨迹解算在软件Inertial Explorer中进行。在添加基站数据时须确定精确的基准站经纬度和椭球高,并采用WGS-84坐标系统;然后检查基站天线类型和仪器高。最后通过添加背包POS数据完成轨迹的初始解算,解算后的局部轨迹线图如图3所示。

图3 测区局部解算轨迹图
(3)SLAM解算。初始轨迹解算完成之后,使用Pegasus Manager软件的SLAM processing模块进行SLAM的解算,首先进行SLAM的时间检测,后在SLAMQC Tool中进行分层平面化处理、检查SLAM质量、编辑SLAM时间和重新计算SLAM等工作;SLAM处理后,使用Multipass进行重复路段的匹配。当轨迹路线存在GNSS观测环境不良或无GNSS信号时,应依据情况进行多次解算,将轨迹质量优化至最佳,才能得到精度优良的成果[3]。
(4)点云的生成与成果输出。检查和分析轨迹文件,无异常并达到最优效果后,在Pegasus Manager软件环境逐一设置参数和选项(可依据工作需要进行全景照片的处理选择),就可挂机自动解算和成果输出,成果点云、全景照片等成果资料输出后,应做必要检查,包括点云厚度、分层情况等,如质量不佳,还可再次返回SLAM解算阶段再次进行分段轨迹优化[3],直至成果达到预期要求。输出的三维彩色点云局部数据如图4所示:
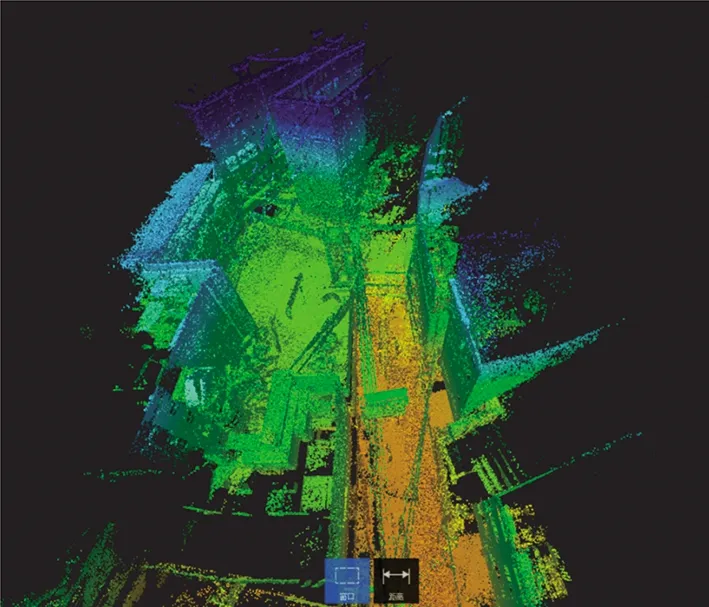
图4 局部点云
3.5 数据去噪与输出
点云数据噪声来源于扫描设备本身、人员操作、目标实体表面材质和采集环境等因素,作业所得的海量点云不可避免存在或多或少的噪点和离群点,严重影响最终的数据直观度、应用和建模效果。故此,采集所获的海量数据并不适合直接使用,点云去噪已然成为点云数据应用之前不可或缺的工作[8]。可采用点云后处理软件Autodesk ReCap的点云编辑及智能清理功能,运用人机交互的方式去除冗余点和噪声点[4]。选取局部点云去噪情况如图5所示:
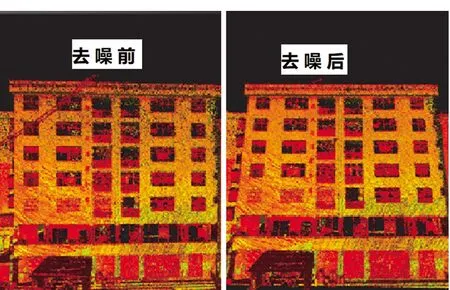
图5 局部点云去噪处理
4 立面图绘制与应用
建筑物立面图主要包含建筑物表面的外貌和外部结构信息、建筑各部分垂直方向的高度,外部装饰造型等等。依据原始点云数据,采用Undet软件,结合Sketch Up强大的三维单体模型构建能力,通过数据预处理将原始点云数据处理后进行立面图的绘制和三维模型的建立,实现建筑物表面的纹理和结构特征精确呈现[7]。
4.1 数据导入与特征提取
生成的*.las、*.pts、*.rcs等格式点云数据可通过Undet插件在Sketch Up直接导入,借助Undet插件的点云数据特征点、线、面拾取功能,特别是平面特征提取与平面交线特征提取两种特征提取功能,对建筑物各特征数据逐一提取。由于点云数据量十分庞大,可通过拉伸限制框的大小减少点云数据的显示,以此达到节约计算机内存资源的目的,并可提高操作速度和刷新速率[4]。如图6所示两栋楼房的立面点云导入数据。
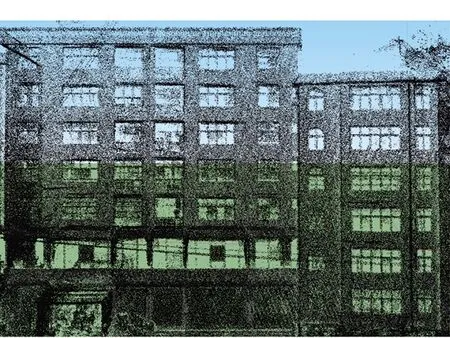
图6 局部立面点云导入数据
4.2 立面绘制
在Undet for Sketch Up环境中正射显示,然后依照建筑物的立面特征,提取特征点,描绘出建筑物的特征线,或者利用Undet角线提取功能逐一获得建筑物特征点、线、面,还可利用Sketch Up平台软件的强大三维构建功能进行面操作,可方便绘出建筑物的立面图或者立面三维模型。为了能够对建筑物的特征点进行准确、全面的拾取,可参照背包系统一同生成的全景照片显示的建筑物外貌特征同步操作,这样可绘制出精细的、较高精度的立面图形[5],如图7所示两栋楼房的临街一侧立面矢量数据。

图7 局部临街一侧立面矢量数据
4.3 立面图应用
在Undet for Sketch Up环境中绘制完成立面图后,可导出DWG矢量图形数据文件直接交付委托方进行设计,也可通过纹理映射功能及插件对三维模型进行纹理贴图进行立面改造后的效果展示。还可通过测区现场拍摄的数码影像、遥感影像等信息对三维模型进行纹理映射贴图,进行改造前后的效果对比分析[7]。如图8所示改造前局部立面模型。

图8 局部立面模型
5 精度检测与效益分析
5.1 精度检测
为验证成果数据的精度,进行了部分数据边长检测,利用经鉴定的钢尺采用常规测量手段对建筑物立面尺寸进行抽查检测,重点抽取楼房的临街立面,从立面图量取各特征点间边长与检测边长作对比分析,边长检测互差中误差为 ±1.8 cm,楼房高度大于 35 m的高空部分边长检测互差中误差为 ±3.5 cm,精度良好,能很好地满足改造设计需求,部分检测数据如表1所示。

部分边长检测数据 表1
5.2 效益分析
(1)传统测量方式只能获得反光片或棱镜所在位置的单点坐标,对棱镜难以到达的区域无法准确获取待测物体信息;无人机能很好地获取建筑物顶面信息,但对于部分被遮挡的立面就会出现数据空洞现象;而移动背包三维激光扫描不需要接触被测物体就可以工作,能实现随走随测。有效解决一般架站式三维激光扫描仪受限于架设位置、设站数与扫描盲区成反比关系的不足,很好的实现高效数据采集、精细全面的数据采集[6]。
(2)项目前期分别采用全站仪测绘方法及低空无人机测绘方法进行施测。全站仪施测共投入8人,内外业用时3天;低空无人机测绘投入3人,内外业用时1.5天,但扫描盲区较多,加之修补时间,实际用时接近3天;移动背包系统扫描投入2人,内外业用时接近1天。从上述内容可知,移动背包系统进行立面测绘应用不但精度优良,能较好满足改造工程的需求,作业效率上也明显优于其他测量手段和方法。众所周知,人力资源成本和时间成本是测绘项目的生产成本的重要组成部分,使用移动背包系统进行立面测绘能很好地降低人力资源成本和时间成本,从而提高了经济效益[6]。
6 结 论
项目实践证明,移动背包三维激光扫描系统高度集成与融合了GNSS、IMU、、INS和SLAM等先进技术,具有作业方式灵活,受场地条件限制小,工作效率高等特点,它改变了城市立面测量的传统作业方法和作业模式,实现了城市建筑物立面信息的快速获取和精细化建模,有效降低了测绘项目实施成本,提高了经济效益。未来,随着移动背包三维激光扫描技术的研究与发展,其应用领域必将会越来越广泛,发展潜力巨大。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
科技创新与品牌(2022年4期)2022-05-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
西部资源(2018年1期)2018-11-01
建筑建材装饰(2017年6期)2017-07-04
作文周刊·小学一年级版(2016年42期)2017-06-06
发明与创新·大科技(2017年5期)2017-05-16
建筑工程技术与设计(2015年12期)2015-10-21