丘陵山地农机具快速换接装置设计与试验
2022-05-24 07:22赵武云辛尚龙陈伯鸿
干旱地区农业研究 2022年3期
杨 天,赵武云,辛尚龙,陈伯鸿,曲 浩
(1.甘肃农业大学机电工程学院,甘肃 兰州 730070;2.甘肃农业大学园艺学院,甘肃 兰州 730070)
我国果园种植面积约1.19×107hm2,水果产量2.57×108t,主要集中在山东、陕西、甘肃等地的丘陵山地地带[1-2],传统的轮式拖拉机由于转弯半径大、爬坡能力差及动力匹配不合理等问题无法适用于丘陵山地果园中,应用广泛的三点悬挂装置需要操作人员将挂接销轴插入球铰及上悬挂点孔内,由于机具悬挂点位置固定,使得挂接难度高、效率低、费时费力[3-6],四点刚性悬挂由于每次换装机具均需人工拆装螺丝,换装效率也无法保证。因此有必要设计一款基于履带式动力底盘的农机具快速换接装置,以提高丘陵山地果园的农机具换接效率及作业质量,进而提升果园机械化水平。
国内目前对于农用快速换接装置的研究较少,贾朝阳等[7]设计了一种基于三点式悬挂的快速挂接器,该挂接器仍沿用三点式悬挂方式,无法有效解决动力自动对接问题。王延宏等[8]设计的机具换接装置作业过程省去大部分人工操作,但仍需操作人员将机具输送至换接机架并手工安装传动轴。高巧明等[9]设计了履带式动力底盘的四点刚性悬挂系统,需要人工运送机具、接合动力、连接螺栓,并未实现真正的快速换接。对于目前应用较为广泛的果园多功能田园管理机,动力结合大都为齿轮连接,更换机具后动力结合即可完成,但机具更换及锁紧均需2人左右配合作业才能完成,耗时费力。这些产品及设计虽然提高了农机具的配套率,实现了一机多用,但并不能实现多种机具的快速换接,在实际生产过程中均需要多人配合才能有效完成机具调整及换装。
本文在充分研究现有农机具挂接方式的前提下,以自行研制的果园履带式动力底盘为基础,拟设计一种农机具快速换接装置,确定其结构及关键参数,通过理论分析与静力学分析确定方案可行性,并进行快速换接试验及田间试验,以期实现不降低农机具挂接稳定性与作业质量的前提下提升多种农机具的换接效率的目的。
1 整体结构及工作原理
1.1 快速换接装置整体结构
快速换接装置整体结构由提升架与挂接架组成,如图1所示。提升架与履带式动力底盘尾部变速箱连接,提升架动力输入链轮与变速箱输出轴同轴连接,挂接架固定于各类作业机具上部,快速换接过程由提升架与挂接架之间的配合悬挂与脱离完成,挂接架结构简单,便于安装在各类农机具上部以实现机具与提升架的挂接,从而实现多种农机具的快速换接。

1.提升架;2.挂接架;3.机具
提升架由主机架、升降液压缸、锁紧液压缸、锁紧导向机构、定位爪具及联轴器等组成,如图2所示。机具架由两个平行的侧板通过矩管连接组成,两个侧板前端均设有挂接槽;升降液压缸一端铰接于履带式动力底盘,另一端与主机架一侧侧板后端的铰接孔连接,对置侧板设置传动装置,传动装置输入端与履带式动力底盘变速箱输出端同轴连接;锁紧液压缸一端与传动链一侧的侧板连接,另一端通过销轴与锁紧爪具连接;锁紧爪具与锁紧液压缸平行,锁紧爪具爪头与机具架侧板平行;定位爪具前端设置两块定位槽对锁紧爪具进行限位;联轴器输入端设置花键槽倒圆角,方便机具传动轴花键进入联轴器花键槽以完成动力结合。
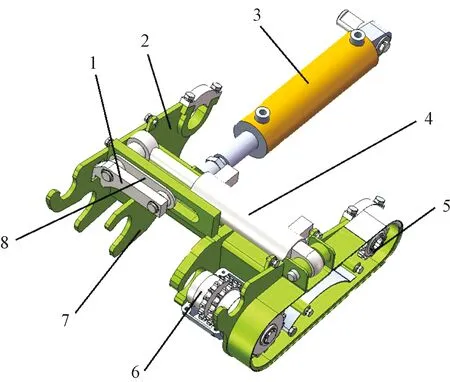
1.锁紧爪具;2.主机架;3.升降液压缸;4.锁紧液压缸;5.传动装置;6.联轴器;7.定位爪具;8.锁紧机构
挂接架由上挂接杆、下挂接杆、挂接板等组成如图3所示。上挂接杆与下挂接杆平行,将各挂接板连接固定并垂直于作业机具上部,下挂接杆同时作为机具传动轴保护套管。机具传动轴输入端花键倒圆角,便于进入联轴器花键槽内。

1.上挂接杆;2.挂接板;3.下挂接杆;4.传动轴
1.2 工作原理
图4为履带式动力底盘通过快速换接装置挂接不同农机具的示意图。快速换接装置提升架安装在履带式作业车变速箱输出轴上,挂接架固定在各作业机具上部。挂接机具时,升降液压缸伸长至行程最远处配合履带作业车行走,并尽可能使提升架挂接槽与挂接架挂接板平行,锁紧爪具爪头与挂接架挂接板对正,此时收缩升降液压缸并倒车使挂接槽进入上挂接杆正下方后伸长升降液压缸,通过提升架挂接槽带动上挂接杆上升,并使下挂接杆在重力作用下进入主机架定位板定位槽内并贴合,此时位于中部的挂接板已进入锁紧爪具爪头内,收缩锁紧液压缸,锁紧爪具带动机具传动轴花键进入联轴器内部花键槽内,继续收缩锁紧液压缸使下挂接杆上的锁定圆面进入定位槽内,实现动力结合的同时完成机具锁定。机具拆卸过程与上述过程反顺序操作。
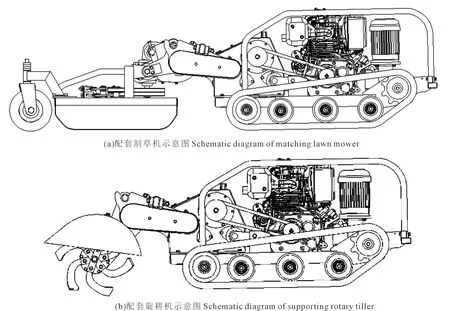
图4 果园履带式动力底盘挂接机具示意图
2 快速换接装置关键部件设计
2.1 主机架架体与挂接架设计
快速换接装置提升架的主机架由侧板为8 mm厚的钢板通过两根50 mm×30 mm×4 mm的矩管焊接而成。整个提升架重量轻、综合力学性能好,满足换接过程及作业过程中的力学条件。如图5所示。
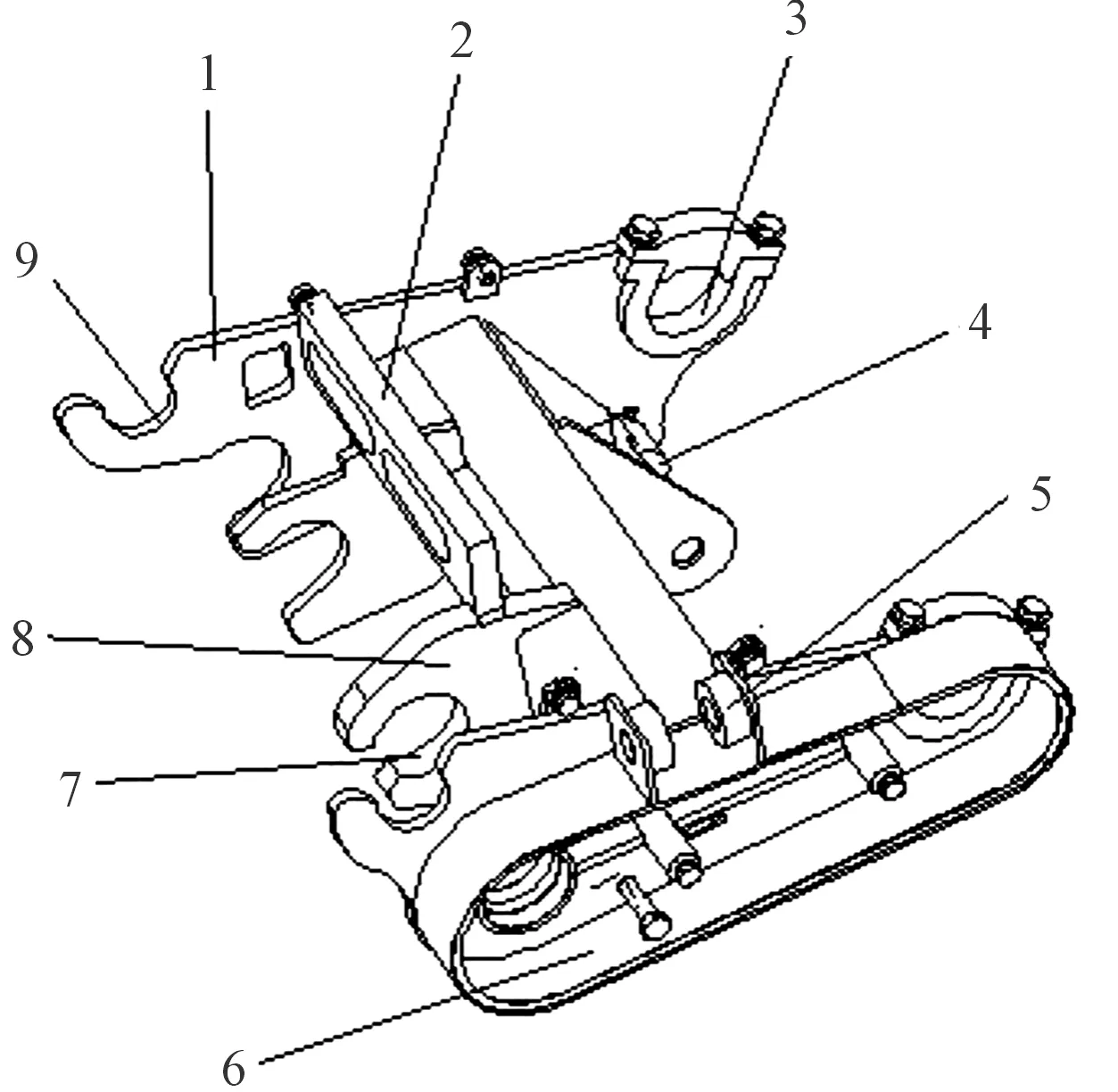
1.侧板;2.锁紧导向板;3.悬挂环;4.升降槽;5.锁紧铰接端;6.传动盒;7.定位槽;8.定位板;9.挂接槽
挂接架上挂接杆为40 mm×5 mm圆管,下挂接杆为60 mm×7 mm圆管,挂接板为8 mm厚钢板,整体重量轻,下挂接杆内部安装机具动力输入轴。如图3所示。
挂接过程由主机架的两个挂接槽挂接上挂接杆,提升后两个定位槽挂接下挂接杆完成对农机具的挂接过程,由于不同的机具上部已固定了挂接架,因此可完成不同农机具的快速换接。相比于传统三点悬挂与四点刚性悬挂采用的孔对孔连接方式,采用挂接槽与圆管进行农机具挂接可增大挂接过程中的容差性,有效减少由于操作误差和环境因素引起的挂接困难和效率较低等问题,对作业环境的适应性更强。
2.2 升降液压缸与锁紧液压缸选取
选取升降液压缸需要对其承担的举升推力进行校核,快速换接装置主要部件质量为:提升架40 kg、割草机86 kg、旋耕机38 kg、还田机80 kg,故所设计快速换接装置与农机具最大重量为126 kg,升降液压缸推力仅考虑最大重量情况。当快速换接机构保持平衡时,作受力分析图,如图6所示,对o点取矩可得:
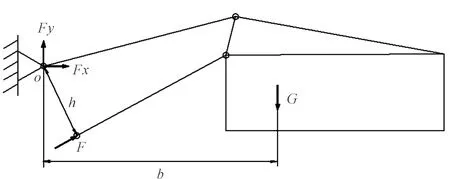
图6 升降液压缸举升受力分析
F·h=G·b
(1)
式中,F为升降液压缸推力,N;h为升降液压缸顶推点到变速箱与快换机构铰接处距离,mm;b为机具重心到到变速箱与快换机构铰接处水平距离,mm;G为机具与快换机构自身重力,N;Fx,Fy为快换机构与变速箱铰接处支反力,N。
要使升降液压缸推动机具上升,需保证液压油缸推力对于o点的力矩大于机具本身重力对o点产生的力矩,即
(2)
通过已建立好的虚拟样机模型应用Solidworks软件的测量功能可以得到式(2)中数值分别为:h=114 mm,G=1 234.8 N,b的数值在升降液压缸伸缩过程中介于492.97~561.79 mm之间,取最大值bmax=b=561.79 mm,带入式(2)可得:F≥6 085 N。
计算可得升降液压缸最小推力F=621 kg,考虑到液压缸活塞杆稳定性及购买便捷,选用压力8 MPa、Ф63/40-150油缸,该油缸最大推力2 500 kg,满足使用要求。
锁紧液压缸仅需克服机具与主机架的摩擦力,所需拉力较小,选用市面常见的压力8 MPa、Ф40/25-100油缸即可满足使用要求。
2.3 锁紧爪具及锁紧机构设计
农机具锁紧机构如图7所示。锁紧爪具、滑动板、锁紧液压缸保持平行,锁紧液压缸筒端与提升架侧板通过销轴连接,杆端与锁紧机构移动主轴一端相连,移动主轴中间套接滑套穿过锁紧导向板中一个腰型孔并与锁紧爪具爪头端相连,滑动轴中间套接滑套穿过锁紧导向板另一个腰型孔与锁紧爪头尾端相连,两个滑动护板对置并与锁紧导向板切合。当锁紧液压缸收缩时,移动主轴带动锁紧爪具、滑动护板、滑动轴及滑套沿锁紧导向板腰型孔向联轴器方向水平移动,动力花键轴进入联轴器花键孔,实现机具动力结合及机具锁定;当锁紧液压缸伸长时,移动主轴带动锁紧爪具、滑动护板、滑动轴及滑套反向运动,动力花键轴退出联轴器花键孔,实现机具动力分离及机具解锁。动力花键轴及联轴器花键孔均设倒角,增加锁紧过程容差性,使动力结合过程更便捷,无需人员手工干预[10-12]。
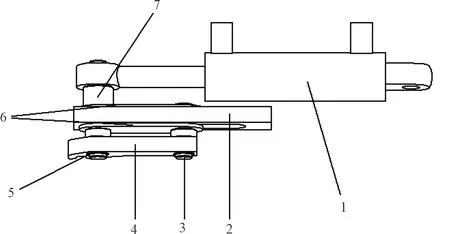
1.锁紧液压缸;2.锁紧导向板;3.滑动轴;4.锁紧爪具;5.轴用弹簧挡圈;6.滑动护板;7.移动主轴
锁紧爪具采用16 mm厚的Q235钢板加工制成,爪具爪头内侧设置Y型倒角,方便对机具挂接板进行抓取及锁定。
2.4 联轴器选取
联轴器分为刚性联轴器与挠性联轴器,由于快速换接装置为全机械操作,快速换接过程受到机具的制造精度与人员操作水平的影响,因此履带式动力底盘与农机具的动力结合选用有补偿性能的挠性联轴器。本装置选用KC5018型滚子链联轴器内置带倒角的花键槽,滚子链联轴器结构简单、尺寸紧凑、质量小、拆装方便、维修容易,具备一定的补偿能力和缓冲性能,且价格仅为三点悬挂常用的万向联轴器的1/20左右[13]。它能够很好地完成快速换接机构中的动力结合与脱离,有效传递履带式动力底盘对各农机具的动力输出。
3 有限元分析
3.1 快速换接装置工作过程受力分析
快速换接装置提升架与挂接架架体均采用Q235钢制作,材料性能如表1所示。

表1 材料性能表
如前所述,在快速换接装置挂接作业机具过程中,提升架与挂接架受力主要分为两种情况:(1)提升架悬挂槽完成对挂接架上挂接杆的挂接,而挂接架下挂接杆尚未进入提升架定位板,此种情况称为初步挂接阶段;(2)提升架悬挂槽及定位板同时对挂接架上挂接杆与下挂接杆完成挂接,此种情况称为稳定挂接阶段。两种挂接情况的受力情况不同,初步挂接阶段提升架悬挂槽受到上挂接杆的压力,上挂接杆受到提升架的提升力及机具自身重力;稳定挂接阶段受力则是安装了挂接架的机具受到提升架悬挂槽的提升力、定位槽的提升力及机具自身重力;提升架受到上挂接杆的压力、下挂接杆的压力、升降液压缸以及变速箱铰接点的支撑力。
3.2 快速换接装置有限元分析
在进行有限元分析之前运用Solidworks软件完成对快速换接装置及相关作业机具的虚拟样机建模,为降低模型的求解难度和提升精准度,在导入前将不必要的倒角、螺纹孔、螺栓等删除,将已经处理好的模型导入ANSYS WORKBENCH软件中进行静力学分析,对快速换接装置换接过程中出现的初步挂接阶段与稳定挂接阶段分别进行有限元分析,检查其强度与刚度是否满足使用要求[14-15]。选用自身质量最重的割草机挂接架为分析对象,初步挂接阶段和稳定挂接阶段分析结果分别如图8和图9所示。
由图8可知,在初步挂接阶段,快速换接机构的提升架最大位移变形量位于一侧悬挂槽端头,数值为0.06 mm,最大等效应力位于主机架与变速箱铰接处,数值为18.19 MPa,挂接架最大位移变形量在挂接机具端头处,数值为0.05 mm,最大等效应力在中部矩管与侧板连接处,数值为89.04 MPa。由图9可知,在稳定挂接阶段,快速换接机构的提升架最大位移变形量在定位板端头,数值为0.05 mm,最大等效应力位于中部对扣矩管的下方,数值为21.21 MPa,挂接架最大位移变形量在挂接机具的端头处,数值为0.02 mm,最大等效应力位于中部矩管与侧板连接处,数值为57.46 MPa。
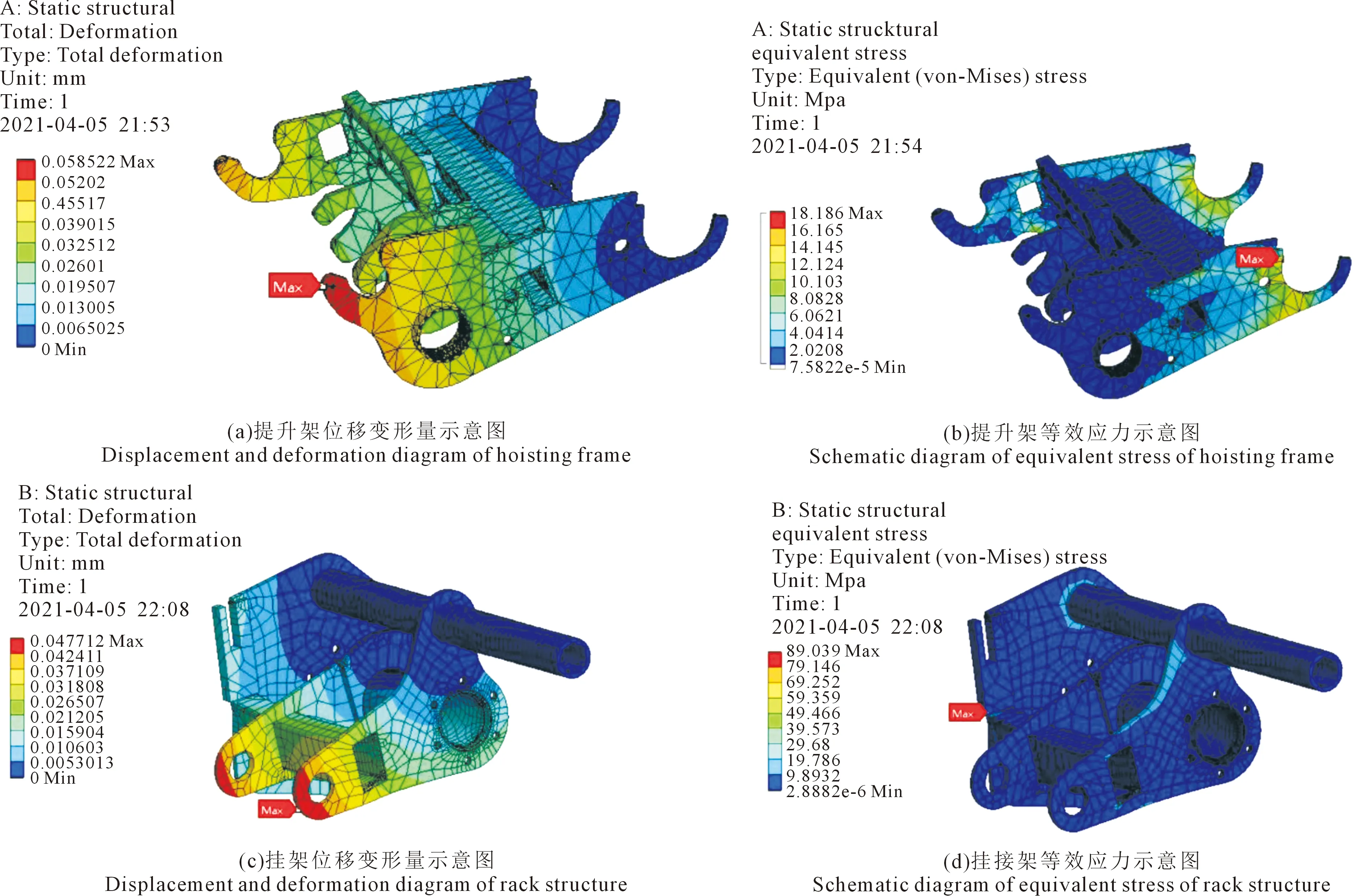
图8 初步挂接阶段分析结果

图9 稳定挂接阶段分析结果
由于快速换接装置可悬挂机具种类较多,选用自身重量最大的割草机作为分析对象能更具代表性得得到快速换接装置在挂接过程中的受力情况及变形情况。由分析结果可知,两种情况下快速换接装置提升架与挂接架最大变形量为0.06 mm,最大等效应力为89.04 MPa,远远小于Q235材料需用应力,可确保农机具换接过程稳定、安全、可靠。
4 快速换接试验与田间试验
4.1 快速换接装置样机试制
通过对快速换接装置的设计计算、虚拟样机建模及有限元分析,能够基本确定所设计快速换接装置能够满足使用要求,将所设计的三维模型整理后,在陕西省咸阳市西安奥拉机械科技有限公司共计加工制造两套样机。提升架与挂接架主体如图10所示。
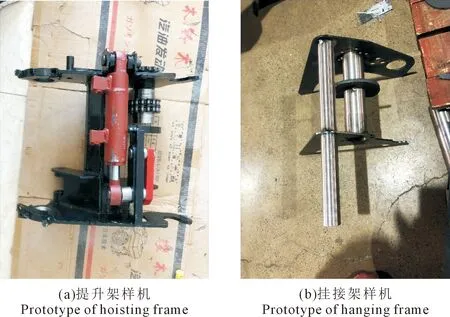
图10 快速换接装置样机
4.2 快速换接装置换接试验
快速换接制造制作完成后在陕西省咸阳市西安奥拉机械科技有限公司场地内进行快速换接试验,检测快速换接装置的可靠性适用性、挂接时间效率,试验采用自主研发的履带式动力底盘配合完成,整个换接过程均未遥控操作。
本次试验对割草机、旋耕机、还田机3种不同类型的农机具进行测试,试验开始前首先将快速换接装置安装于履带式动力底盘变速箱输出轴上,连接好升降液压缸及锁紧液压缸油路,使锁紧液压缸伸长至导向机构最远处。试验开始后,操作员遥控操作履带式作业车伸长液压缸,配合动力底盘倒车至机具正前方,尽可能将锁紧爪具爪头与机具挂接板对正(图11a),待挂接槽靠近机具时收缩升降液压缸,使悬挂槽位于液压缸下侧时停车(图11b)。此时遥控操作升降液压缸伸长使提升架抬升(图11c),挂接槽悬挂机具上挂接杆带动机具上升,机具下挂接杆依靠机具自身重力进入提升架定位槽中,待下挂接杆外壁与定位槽内壁完全贴合后停止升降液压缸伸长,此时锁紧爪具完成对挂接板抓取(图11d)。遥控操作锁紧液压缸收缩,锁紧爪具抓取挂接板带动机具向联轴器方向水平移动(图11e),机具动力输入轴进入联轴器内花键完成动力结合的同时,下挂接杆外侧锁紧环与定位板定位槽内壁完成紧配合以保证机具锁紧(图11f),完成机具挂接作业。由于锁紧爪具爪头内侧及挂接板外侧设置倒角,联轴器内花键槽与机具动力输入轴花键头设置倒角,所以允许操作员在操作履带式作业车的过程中有一定的操作误差,保证快速换接装置作业顺利。快速换接装置脱离机具按上述过程反向操作。
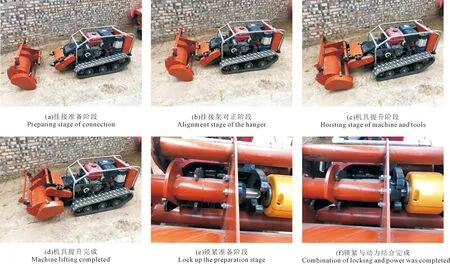
图11 挂接过程示意图
对安装了挂接架的割草机、旋耕机、还田机进行基于快速换接装置的挂接与脱离。试验中挂接与脱离过程均顺利完成,安装了快速换接装置的履带式动力底盘整体状态稳定、挂接可靠、动力结合顺畅。挂接效率的试验测试参照JB/T 6714.2-2007《农业拖拉机液压悬挂系统试验方法》[16]进行,挂接时间指操作遥控手柄开始升降液压缸伸长直至锁紧液压缸带动机具完成动力结合与锁紧所经历的时间,共测定3次,取平均值。选取挂接架结构较为复杂的还田机进行测试,挂接时间分别为3.2、3.5、4.3 s,取平均值为3.67 s。当多功能作业车靠近机具后,从启动履带式动力底盘到完成挂接作业最长用时不到15 s,完成一次快速换接作业总用时不足40 s,全程未出现需要操作人员手工干预的状况。
4.3 田间试验
田间试验地点在陕西省咸阳市西安奥拉机械科技有限公司附近一处樱桃园,试验环境温度24 ℃,本次田间试验配套割草机进行,采用自主研发的履带式动力底盘配合完成,以验证快速换接装置在作业过程中的可靠性及机具作业质量。
试验时履带式动力底盘行走速度设定为4 km·h-1,割草机割茬高度设定为70 mm,每次试验前进5 m,共进行5次试验。以碎草率为评价指标,每试验段取一处0.5 m×1 m的样方进行草段长度统计,割草机作业后草段长度≤70 mm的草段定义为碎草,全割幅范围的碎草重与该范围内已割下的杂草重之比为碎草率,碎草率按下式计算[17-18]:
(3)
式中,SSC为碎草率,%;GS为碎草重量,kg;Gyg为已割杂草重量,kg。
每行程的割幅利用系数按下式计算:
(4)
式中,Kf为割幅利用系数;Ags为平均实际割幅,mm;Ag1为理论割幅,mm。
4.4 田间试验结果分析
田间试验过程中,履带式动力底盘及割草机工作稳定,快速换接装置挂接稳定,动力传输可靠,验证了快速换接装置在实际田间作业过程中的可靠性。割草机碎草效果如表2所示。
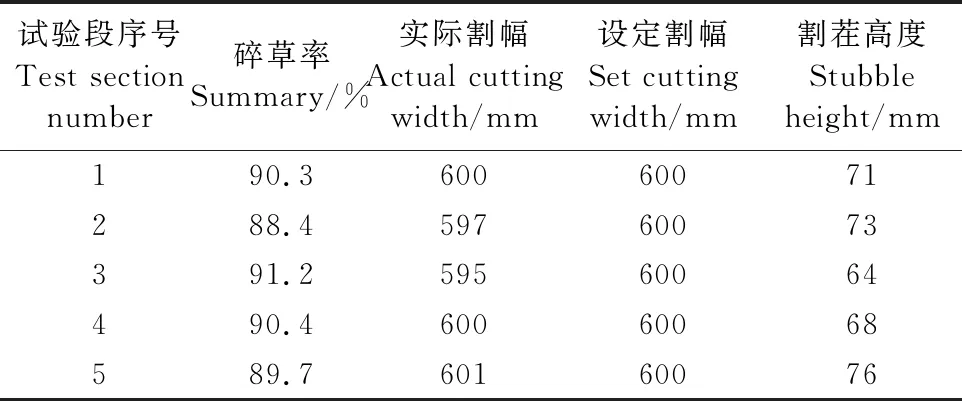
表2 碎草率试验结果
试验表明,快速换接装置配套割草机进行果园碎草时碎草率可达到88%以上,割幅稳定,割茬高度基本稳定在设定高度70 mm,主要作业指标满足DB 13/T 2729-2018《果园碎草机通用技术要求》[19]中规定的碎草率≥85%的要求,能够满足果园碎草作业需求。与河北农业大学所设计的采用三点式悬挂的果园垄面割草机与自走式果园割草机进行对比[20-21],采用快速换接装置进行田间作业并未影响机具作业性能,能够在满足作业需求的前提下提升机具换接效率。
5 结 论
1)应用ANSYS WORKBENCH软件进行静力学分析,得到初步挂接与稳定挂接阶段时提升架最大变形量分别为0.06 mm和0.05 mm,挂接架分别为0.05 mm和0.02 mm,提升架最大等效应力分别为18.19 MPa和21.21 MPa,挂接架分别为89.04 MPa和57.46 MPa,满足使用要求。
2)结合自主研发的履带式多功能动力底盘对快速换接装置进行换接试验,根据实验结果可知,完成机具单次挂接时间为3.67 s,完成一次农机具快速换接全过程用时小于40 s,挂接过程安全可靠,挂接质量高,极大提高了换接效率。
3)快速换接装置配套割草机田间试验表明,整机作业稳定,碎草率、割幅稳定性、割茬高度稳定性均在设计规范要求内,主要作业指标碎草率高于88%,满足田间作业要求。
猜你喜欢
机床与液压(2022年18期)2022-10-13
广东造船(2022年3期)2022-07-09
民间故事选刊·上(2022年4期)2022-04-17
民间故事选刊(2022年7期)2022-04-15
矿山机械(2022年2期)2022-03-02
科学与生活(2021年16期)2021-11-25
时代文学·上半月(2019年6期)2019-12-13
环球时报(2019-06-11)2019-06-11
中国高新技术企业(2017年11期)2017-07-08
中国机械(2015年1期)2015-10-21