针对ASR系统防误触的复杂路面识别算法*
2022-06-08 02:09李希宸解晓天汪博文王新宇
汽车工程 2022年5期
李希宸,张 虹,解晓天,汪博文,王新宇
(北京理工大学机械与车辆学院,北京 100081)
前言
在21 世纪,能源已经成为人类不可忽视的关注对象。在各国政府节能、减排的政策号召下,电动汽车成为了传统燃油汽车的替代品,是当今工业界的重要发展领域。与燃油汽车不同,电动汽车机械结构简单,更依赖于准确的电子控制系统,因此电动汽车的安全控制问题成为了车辆动力学研究的新发展方向,驱动防滑系统(acceleration slip regulation,ASR)便是关键技术之一。
以滑移率为控制目标的驱动防滑系统是将车轮滑移率控制在当前路面的最优滑移率附近来获得峰值路面附着系数,以满足车辆动力性与稳定性需求。当汽车行驶在不平路面时,驱动轮存在悬空的特殊状态导致滑移率迅速攀升,传统的ASR 将被错误开启使驱动轮输出动力受阻汽车不能尽快脱离不平路面,动力顿挫感影响舒适性。因此,有必要优化传统的电子控制系统,以提高汽车行驶在特殊路面的控制精度。
文献[1]中提出了基于车轮加速度的路面识别方法,建立了沟坎、减速带工况下的ASR 控制模型,并采用车轮加速度门限逻辑控制方法解决了汽车行驶在高附着不平路面上时ASR 系统被错误激发的问题。文献[2]中针对受不平路面影响防抱死制动系统(anti-lock braking system,ABS)产生错误动作的问题,提出了基于多级穿越门限、多级不平累加值及自减参数的ABS 路面不平度实时识别算法,实现了不平路面条件下的防抱死制动控制。文献[3]中通过分析车辆在不平路面上的纵向动力学,验证了利用纵向加速度识别不平路面的可能性,采用了能量比重法与穿越计数法来识别崎岖道路,解决了双参数换挡控制在不平路面上循环换挡问题。文献[4]中通过分析对比汽车行驶在颠簸路面和长直路面的车速与发动机转速的变化趋势,提出基于发动机转速变化率的路面不平识别方法,有效改善汽车行驶在不平路面的循环换挡问题。文献[5]~文献[7]中采用先进的激光雷达传感器,通过提取不平路面的边线、高度、矢量等数据,计算边线与不平路段的平均高度偏差实现对于不平路面的识别,该方法对于硬件提出了更高的要求。
本文中以后驱电动汽车行驶在不平路面的侧倾角和滑移率为输入,结合能量比重法和穿越计数法判定路面不平状况,根据路面特征值计算结果判定路面条件,选择是否关闭ASR,解决电动后驱车受不平路面影响而错误触发ASR 的问题。采用门限逻辑方法,通过提取不同组对车轮行驶在沟坎工况的滑移率变化,识别沟坎不平路面,为沟坎路面条件下的电动汽车动力系统控制提供理论基础。
1 路面不平度时域模型
根据ISO 8608-2016(E)标准,通过比较多种来源的垂直道路剖面测量数据将路面分为8 级,路面不平度系数根据标准选取,采用滤波白噪声生成法,以汽车匀速行驶的车速作为输入,路面不平度高程可表达为

式中:为下截止空间频率;G为路面不平度系数;()为均值为零的Gauss白噪声;()为路面随机不平度位移;为参考空间频率,表征路面不平度的相关系数,公式推导见文献[8]。路面不平度系数分级标准如表1所示。
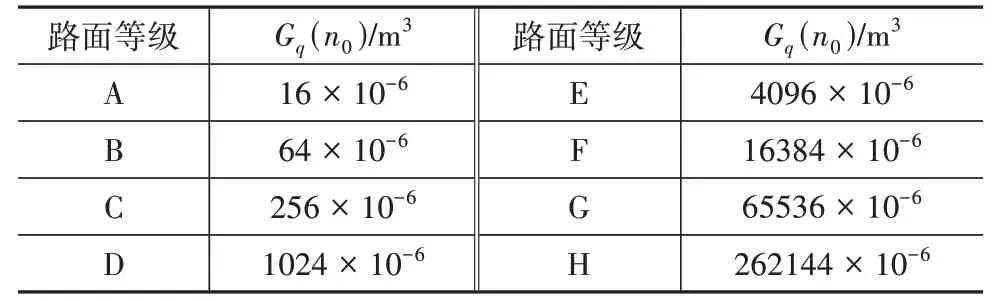
表1 路面不平度分级标准
路面不平度利用Matlab/Simulink 白噪声输入得到的车速为40 km/h 的A、B、C、D 级不平路面如图1所示。由图可见,A、B、C级路面平整度较为相近,适用于模拟城市不平路段;D 级不平路面存在的显著变化,可反映道路破损与未修建路段,适用于城乡结合路面。

图1 40 km/h下的不平路面激励
2 ASR错误触发原因
2.1 沟坎不平路面触发ASR系统
路面不平分两种类型:一种是以减速带为代表的沟坎不平路面,多出现在人口密集的城镇街道;另一种是以坑洼路面为代表的连续不平路面,多出现在城乡结合路段。
电动汽车行驶在不平路段,受震动影响采集的信号将产生大量噪声尖刺,直接影响控制效果。本文采用实验室开发的基于H的滤波方法,轮速与车速信号滤波效果如图2所示。

图2 滤波效果对比图
研究条件为后驱车以恒定的踏板开度,车速在平直路面驶向沟坎路面,轮速信号由传感器采集,行驶车速由前期提出的状态估计方法获得。前桥车轮接触沟坎时受突变阻力,运动姿态的变化将影响(见图4)前桥轮速下滑,根据式(2)滑移率发生“负”跳变。后桥驱动轮接触沟坎分3 个阶段:第1 个阶段,同前桥车轮相同发生滑移率“负”跳变;第2 个阶段,驱动轮悬空轮速上升而车速受阻下降,滑移率发生“正”跳变;第3 个阶段,驱动轮落地,由于车体的俯仰运动,前后桥载荷产生波动,前后轮的滑移率也随着垂向载荷的变化而发生波动。为简化计算,滑移率采用绝对值,后驱车行驶在沟坎工况的滑移率变化如图3所示。

图3 减速带工况下的滑移率变化图
受沟坎路面影响,汽车的运动姿态发生变化,如图4所示。其中为车轮滑移率,为车轮角速度,为汽车实际行驶方向速度,为汽车纵向速度,为车轮半径。

图4 减速带工况下的车轮运动示意图
根据滑移率计算公式,即

汽车实际行驶方向速度与纵向行驶速度之间存在夹角,两者关系为

为通过状态估计获得的车速,接触沟坎时车轮实际行驶速度相对纵向行驶速度将产生偏差,并且车轮的角速度受突变阻力和车轮悬空两种状态影响而发生变化。根据式(2),车轮滑移率发生跳变,以滑移率为控制目标的ASR 系统将被错误触发产生主动制动以消除车轮“打滑”现象。
2.2 连续不平路面触发ASR系统
与汽车行驶在沟坎工况不同,汽车行驶在连续不平路面时存在着实际车速与估计车速不一致的现象,同时还存在着左右侧车轮发生不同时刻车轮悬空的特殊工况。汽车行驶在连续不平路面的运动示意图如图5所示。
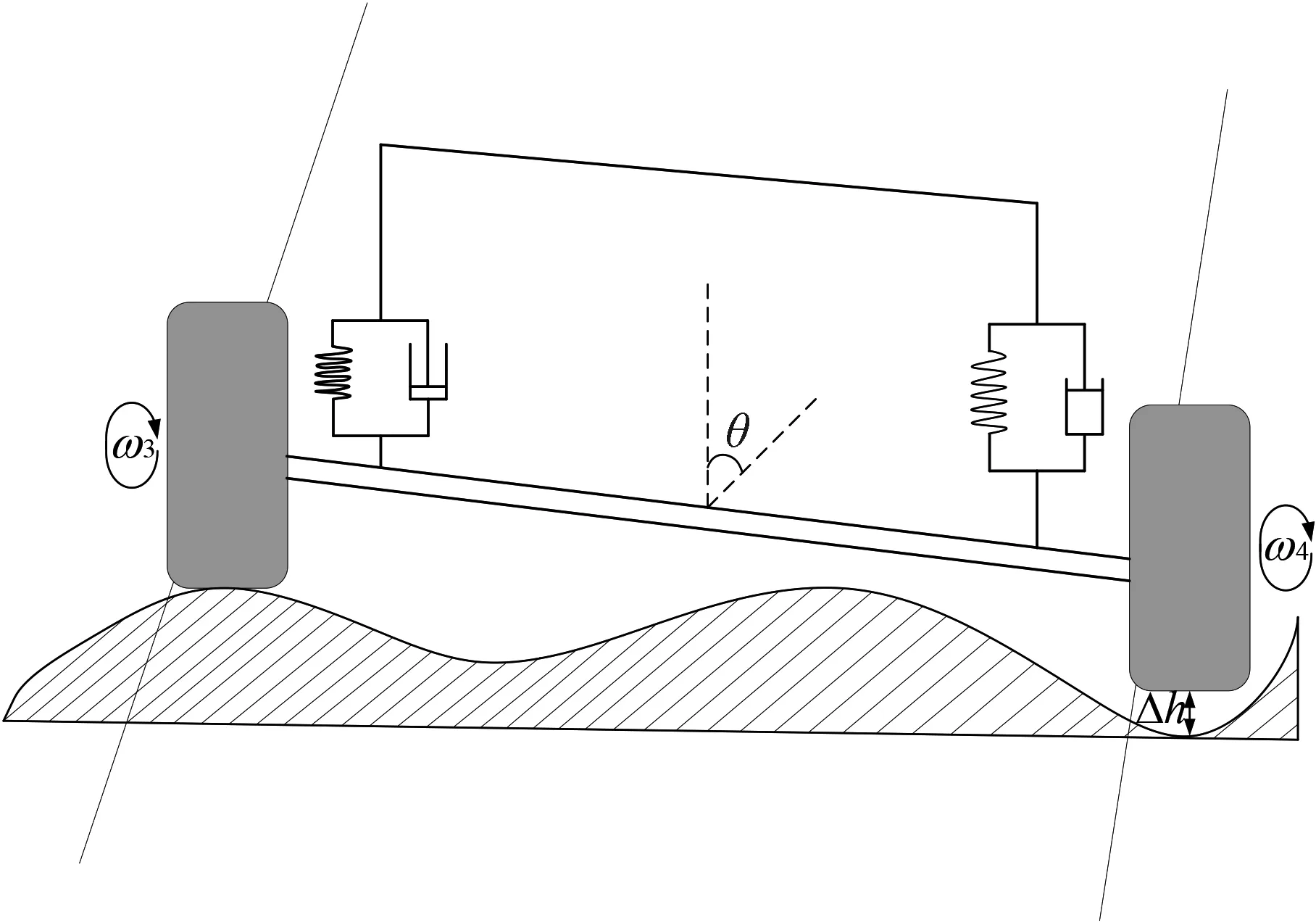
图5 连续不平路面下的车轮运动示意图
以后桥车轮为例,左侧驱动轮接触凸起路面,受坡度阻力的影响左侧车轮角速度下降为Δ。右侧驱动轮车轮处于悬空状态,受电机驱动力作用右侧车轮角速度升高Δ,即

根据滑移率计算方法,将出现右侧车轮滑移率突破阈值而错误触发ASR。后驱车行驶在连续不平路面的路面激励如图6所示。
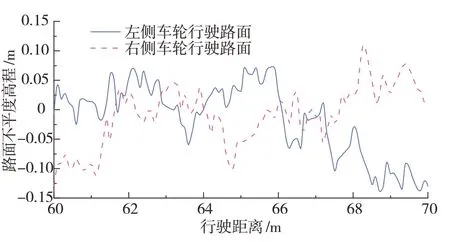
图6 不平路面激励
3 不平路面识别
3.1 沟坎不平路面识别
为优化动力系统的控制效果,需要对减速带为代表的沟坎不平路面进行识别。采用激光雷达对路面进行扫描,可以实现对于沟坎路面的精确识别。由于激光雷达成本高昂,实时性较差,当前普遍应用于实验研究,难以应用推广。采用基于门限的沟坎路面识别逻辑,对硬件的依赖性小、实时性强,可用于工程实践当中。
根据图2 所示的汽车行驶在减速带的滑移率变化图,选择车轮滑移率、整车侧倾角作为输入,其计算公式为


减速带识别算法基于同轴、同侧车轮的滑移率变化,汽车行驶过沟坎路面时,前桥车轮先接触沟坎,此时计算判定车轮(左前、右前车轮)滑移率与5个采样点(50 ms)之前的差值是否超过0.1(实际滑移率)。若同侧前后桥车轮差值滑移率大于0.08,则认为是前桥车轮接触减速带而后桥车轮未经过减速带;若后桥两车轮滑移率差值大于0.05,则判断为行经对开路面,差值小于0.05 判断为均一路面。整车侧倾角变化小于5°时认为路面特征符合沟坎路面需进一步判别,前桥车轮信号满足条件时进入驱动轮信号条件判定。当驱动轮滑移率较5 个采样点前差值达0.1,且同侧前后桥车轮滑移率之差大于0.08、前桥两车轮滑移率差值变化小于0.05 时,认为车辆经过沟坎路段,在后桥条件判定的Enable 区间内,信号符合条件即判定为行经沟坎不平路面。在整个控制阶段都需判别同轴两侧车轮滑移率差值的变化,以识别沟坎路面是否位于对开路面,行经对开路面以保证驾驶员安全为优先,ASR 正常启动。沟坎路面识别逻辑框图如图7所示。
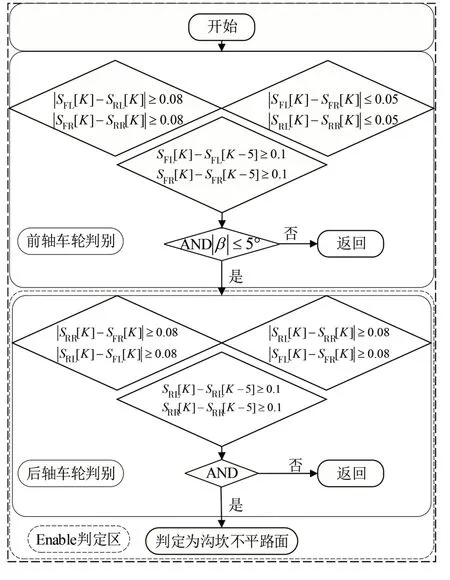
图7 沟坎路面识别逻辑框图
3.2 连续路面不平路面识别
3.2.1 不平事件判别
汽车行驶在高附着连续不平路面时,受不平路面影响车轮发生频繁的径向抖动,受限于悬架及传感器的布置,整车垂向位移较小无法准确反映出车轮径向跳动的变化,故选取合适的不平路面观测量成为难点。采用“能量比重法”将传感器采集的时域信号经过傅里叶变换转化为频域信号,通过计算不同频率区间信号的相对密度来判别路面的不平程度,但算法存在信号类型的转换无法直接应用,通过调整算法后可应用于工程实践中。
结合能量比重法和穿越计次法,以汽车行驶在不平路面的侧倾角作为输入,提取侧倾角大于5°的信号,计算该信号占比30 个采样点信号的能量比重,占比超过30%时判别为路面不平,求解公式为

式中:()为侧倾角信号;为采样时间。
汽车行驶在D 级别的路面时的穿越计次法统计规律如图8 所示,A、B、C、D 级不平路面侧倾角变化如表2 所示。穿越计次法具备响应速度快、区分度高、判别准确的优势,能够反映出不平路面的不平程度。
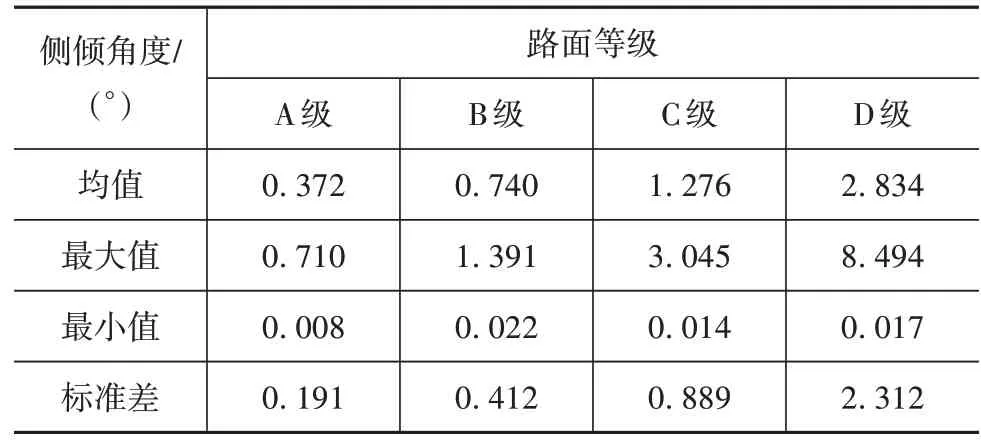
表2 整车侧倾角变化

图8 穿越计次法统计规律
3.2.2 路面条件识别
连续不平路面的识别分两个阶段,不平路面判定与路面条件识别。不平路面判定用于决策是否采用优化后的路面不平控制算法,而路面条件识别的意义在于识别路面条件选择是否正常启用ASR。如行驶在低附着路面上ASR 正常开启时,表明驾驶员安全性需求优先于动力性需求。
路面条件识别需要高精度的路面特征模型作为支撑,BURCKHARDT 通过大量的路面试验,总结了7 种典型路面的-(路面利用附着系数-滑移率)曲线,其表达式为

式中:、、为动力学模型系数,通过试验得到;为车轮滑移率;为路面利用附着系数。其中、、参数如表3 所示,典型路面-变化规律如图9所示。
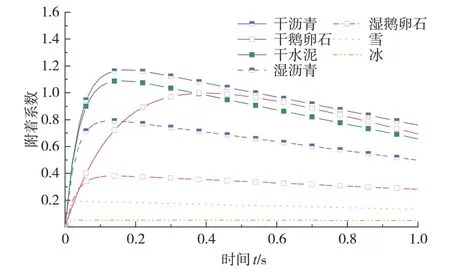
图9 不同路面条件下的μ - s曲线

表3 路面条件参数表
综上所述,以典型路面滑移率和附着系数变化规律为经验库,通过定义“路面状态特征值”评价不平路面下的路面条件,其表达式为

式中()为路面条件判定阶段滑移率对应路面的附着系数。的计算结果如图10所示。路面状态特征值通过计算当前行驶路面的最优滑移率和峰值附着系数所包围的封闭面积的大小区分不同路面条件。受控制器保存数据精度影响,将求解计算得出的理论特征值进行放大作为路面特征值门限来进行路面条件区分。

图10 路面状态特征值τ
如表3 所示,低附着路面如冰、雪路面对比高附着路面如干沥青、干水泥路面,在峰值路面附着系数相差明显,可通过特征值的计算来进行区分,但在高附着路面最优滑移率和峰值附着系数所包围的面积相差不大时,特征值求解差异不明显,故特征值可视为区分低附着和高附着路面条件的判定条件。
通过设置合适的特征值区间,结合不平路面判定结果,可有效解决汽车行驶在高附着不平路面上ASR 错误开启的问题。路面状态特征值区间如表3所示,特征值区间参考我国高等级公路B、C 级不平路面修正,适用城乡地区不平路段。
3.2.3 ASR阈值调整
以滑移率为控制目标的ASR 系统,通过对打滑车轮采取主动制动,以消除车轮打滑现象,若汽车处于路面等级较高的高附着不平路面时便关闭ASR系统。车轮的打滑状况只能由摩擦阻力进行消除,汽车易产生非理想横摆,在中高车速下不利于汽车安全行驶,可通过设置合适的ASR 系统门限值以提高汽车安全性,减少ASR误触发。
当车轮滑移率为∈[0,0.2]时,ASR 系统关闭,汽车处于稳定状态;当车轮滑移为∈[0.2,0.3]时,调整ASR 主动制动压力为30%,限制滑移率的继续攀升;当车轮滑移率为∈[0.3,0.4]时,提高主动制动压力至60%;当车轮滑移率为∈[0.4,1]时,表明汽车处于不稳定状态,仅通过车轮与路面接触消除打滑现象时间较久,须提高主动制动压力至90%,以尽快消除打滑状态。控制效果如图11所示。

图11 ASR阈值调整对比图
调整后的ASR 系统降低非理想横摆效果明显,它降低了由于左右侧车轮制动力不等所带来的非理想横摆,同时对消除车轮打滑现象与ASR 系统全面启动控制效果相当。具体算法为:以车轮滑移率、路面利用附着系数、整车侧倾角为输入量;当有滑移率较5 个采样点前滑移率差值达0.1 时进入沟坎路面判定模式;若不同组对车轮滑移率符合沟坎路面判定条件,且整车侧倾角小于5°,则进入后轴车轮信号逻辑判定,在进入后轴条件判定的2 s 内,有信号符合条件则认为是汽车行驶在沟坎路面,不符合则退出沟坎不平路面判定模式。当整车侧倾角变化超过8°时进入连续不平路面判定模式;若“不平”事件概率突破阈值就进入路面条件判定区。通过计算路面状态特征值,并以进入路面条件判定区后采集的最大路面附着系数,选取合适的特征值输出通道(不同输出通道影响滑移率计算区间)。路面状态特征值根据表3 参数落入不同的判定区间,当路面等级判定大于等于4 时,通过ASR 阈值分区调整主动制动压力。当整车控制器采集到连续5 个采样点的低路面利用附着系数时,退出不平路面识别算法,ASR系统正常开启,控制算法流程如图12所示。
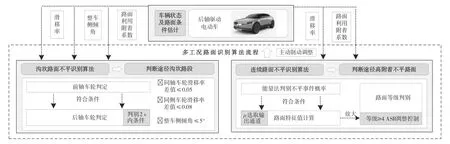
图12 控制算法流程框图
4 仿真算例
4.1 沟坎不平路面仿真结果分析
通过CarSim 设置沟坎路面模型,汽车做起步加速运动,行经35 m处经过减速带。
从图13 可以看出,行经35 m 处,前轴车轮先发生滑移率阶跃进入后轴车轮滑移率变化判定区,待后轴车轮滑移率波动符合沟坎路面特征后,整车控制器识别出沟坎不平路面,这与算法预期相符。自适应的Enable 判定区间取决于行驶车速,可有效解决判定时间过长、多次触发沟坎路面识别的问题。
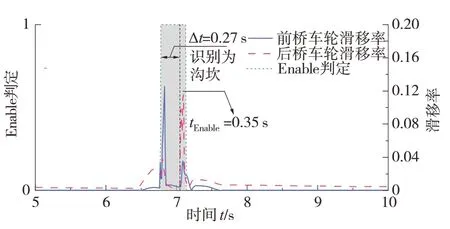
图13 沟坎路面识别效果图
4.2 对接连续不平路面仿真结果分析
为了验证控制效果采用CarSim/Simulink 联合仿真。利用CarSim 软件环境模拟城乡结合路段,设置汽车行驶在500 m长的直路段,将Simulink生成的基于白噪声的不平路面模型导入CarSim 路面模型中。算例模拟汽车从停车状态启动,加速踏板保持恒定,汽车行驶到60 m 处后行经10 m 的D 级不平路面,路面最优滑移率为13%,峰值附着系数为0.8。
从图14 可以看出,汽车行驶9.6 s 后进入连续不平路段,侧倾角变化突破阈值进入不平路面判定,10.1 s 判断路面不平,进入路面条件判定,并选择ASR工作模式。特征值计算通过取左右侧车轮的最小特征值作为“检测特征值”,特征值落入特征区间的等级序号为7,判定路面为高附着连续不平路面,ASR 采用阈值调整控制,特征值变化特性如图15 所示。如图16 表明,对比行驶在平直路段,连续不平路段受不平阻力和主动制动影响,车速有明显的下滑趋势,通过调整ASR 控制阈值,缩短主动制动时间,有助于快速脱离不平路面,同时减少ASR 频繁开启和关闭导致的制动系统负担。图17 表明优化ASR 控制在制动压力上的效果,优化后ASR 主动制动压力具有幅值小、作用时间短的特性,这也是整车动力性得到保障的根本所在。
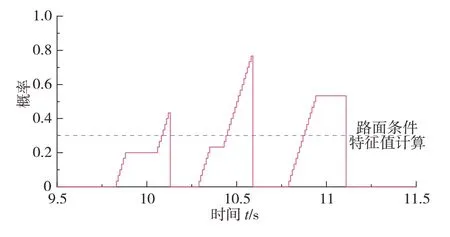
图14 不平路面判定效果图
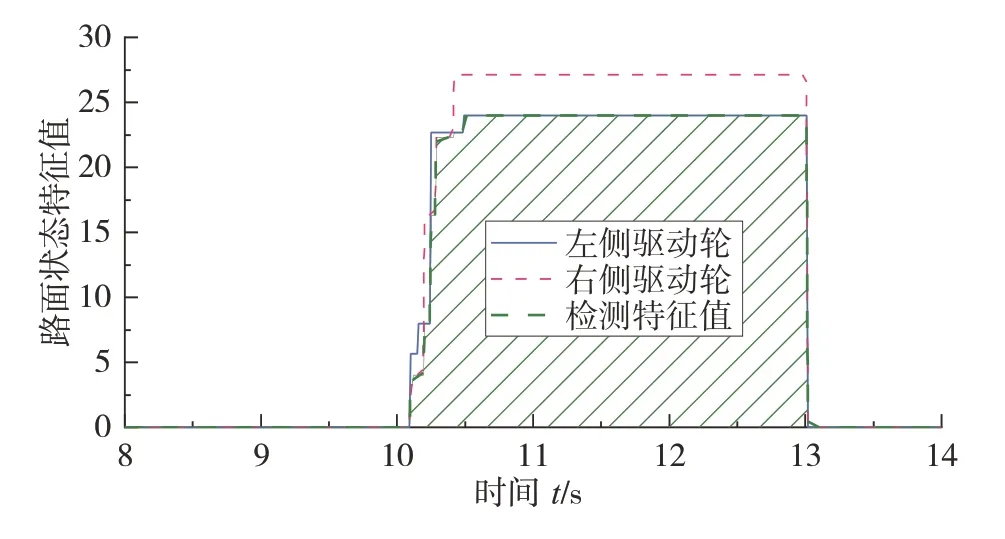
图15 连续不平路面特征值检测结果图
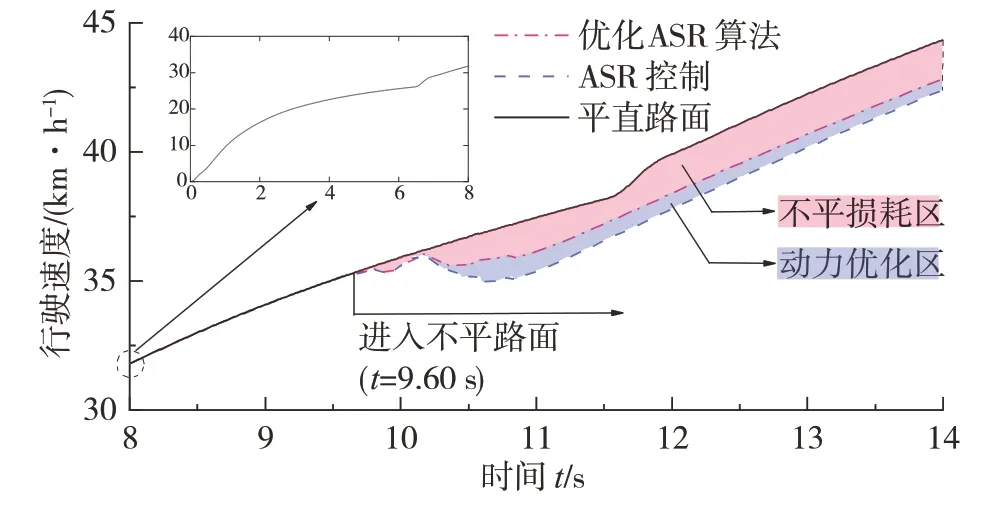
图16 车速对比效果
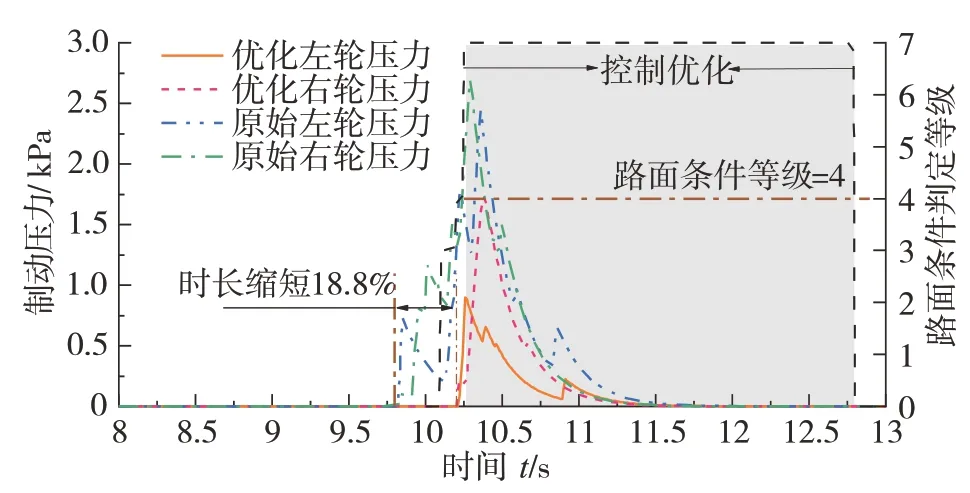
图17 制动压力对比图
5 结论
(1)经算法验证,基于白噪声的路面激励模型可良好体现路面的不平度和随机性,具备汽车控制技术在不平路面条件进行仿真模拟的可行性。
(2)文中采用基于路面特征值的识别方法对于路面不平度干扰具有较高的鲁棒性,可以优化以滑移率为控制目标的驱动防滑系统。
(3)文中提出的ASR 阈值调整控制有助于消除受主动制动压力不等所带来的非理想横摆,同时可以快速消除车轮悬空导致的打滑现象,有效缩短主动制动时长18.8%,减少汽车在高附着不平路面上的动力损失,提高驾驶体验。
(4)文中提出的基于以滑移率阶跃门限值的单次激励类路面识别方法能够有效判断沟坎、减速带等特征路面,进而减少驱动防滑系统误触发,保证车辆正常动力输出。
猜你喜欢
杭州(2021年22期)2021-12-15
中学生理科应试(2021年11期)2021-12-09
考试与评价·高二版(2021年4期)2021-09-10
数学大王·低年级(2021年2期)2021-02-21
东坡赤壁诗词(2019年5期)2019-11-14
求学·文科版(2019年3期)2019-03-30
小猕猴智力画刊(2018年7期)2018-08-08
今古传奇·故事版(2017年12期)2017-07-27
课程教育研究·新教师教学(2016年18期)2017-04-12
数学学习与研究(2016年19期)2016-11-22