
基于电磁力的转子不平衡-不对中振动靶向抑制
2022-06-08 07:33暴一帆国玉林姚剑飞
轴承 2022年3期
暴一帆,国玉林,姚剑飞
(北京化工大学 机电工程学院,北京 100029)
旋转机械是现代工业的重要设备,其稳定性直接影响企业的生产安全和经济效益。旋转机械转子系统运行环境恶劣,受多种激励源的作用,振动故障耦合严重,振动成分复杂且噪声较大,若不及时有效抑制转子振动,故障会进一步恶化,从而导致事故的发生。
主动磁轴承因具有无接触、无摩擦、无润滑、无密封、低功耗等特点,常作为执行机构用于转子振动的主动控制[1]。国内外学者在利用电磁力抑制旋转机械转子系统振动方面做了大量研究。转子不平衡振动(以工频振动为主)抑制方面:文献[2]提出一种结合新型自适应陷波滤波器的前馈控制策略解决磁悬浮离心压缩机转子不平衡问题;文献[3]设计实时变步长多边形迭代搜寻算法的不平衡补偿器抑制转子振动;文献[4]提出一种基于幅值和相位特征的不平衡力快速寻优前馈算法;文献[5]提出了一种基于电磁作动器(Active Magnetic Actuator,AMA)的比例-微分(Proportional Differential,PD)反馈控制算法抑制转子不平衡引起的基频振动。转子不对中故障(以工频、二倍频为主的复合振动)或多频振动抑制方面:文献[6-7]通过变步长寻优策略得到电磁作动器所需的最佳电流,向转子施加多频率成分电流实现转子多频振动前馈抑制;文献[8]通过电流补偿算法有效抑制了转子系统的多频振动;文献[9]参考不平衡试算法,从理论仿真方面提出了一种不对中故障的试算方法。
文献[2-4]均基于前馈算法对转子不平衡故障进行主动抑制,抗扰动能力及控制稳定性差,文献[5]PD反馈控制算法稳定性优异,但在恶劣工况及全频随机噪声的影响下控制精度较低,缺少振动抑制的靶向性,此外,PD算法主要用于单一频率、单一故障抑制,有必要考虑PD算法抑制转子振动的靶向性,对其在多频率、多故障的振动抑制进行研究。
振动靶向抑制方面:文献[10]提出靶向抑制概念,即通过分析故障的机理和特征,找准故障靶点,以采取相应措施精准抑制转子振动;文献[11]阐述了透平机械系统中的振动靶向抑制,分析了透平机械转子-轴承系统中转子的多频率成分振动的靶向抑制;文献[12]针对旋转机械气压液体式不平衡振动故障,利用气压液体式自动平衡装置搭建了靶向自愈调控系统。
本文基于文献[10-12]的靶向抑制思路,将其应用到基于AMA的PD控制策略,以抑制转子不平衡和不对中耦合故障。采用AMA作为控制执行机构,设计了基于电磁作动器的PD算法控制器,以抑制旋转机械转子系统不平衡-不对中耦合故障引起的周期振动。
1 系统建模
1.1 动力学建模
基于有限元法建立转子-轴承-AMA系统(图1)动力学模型,即
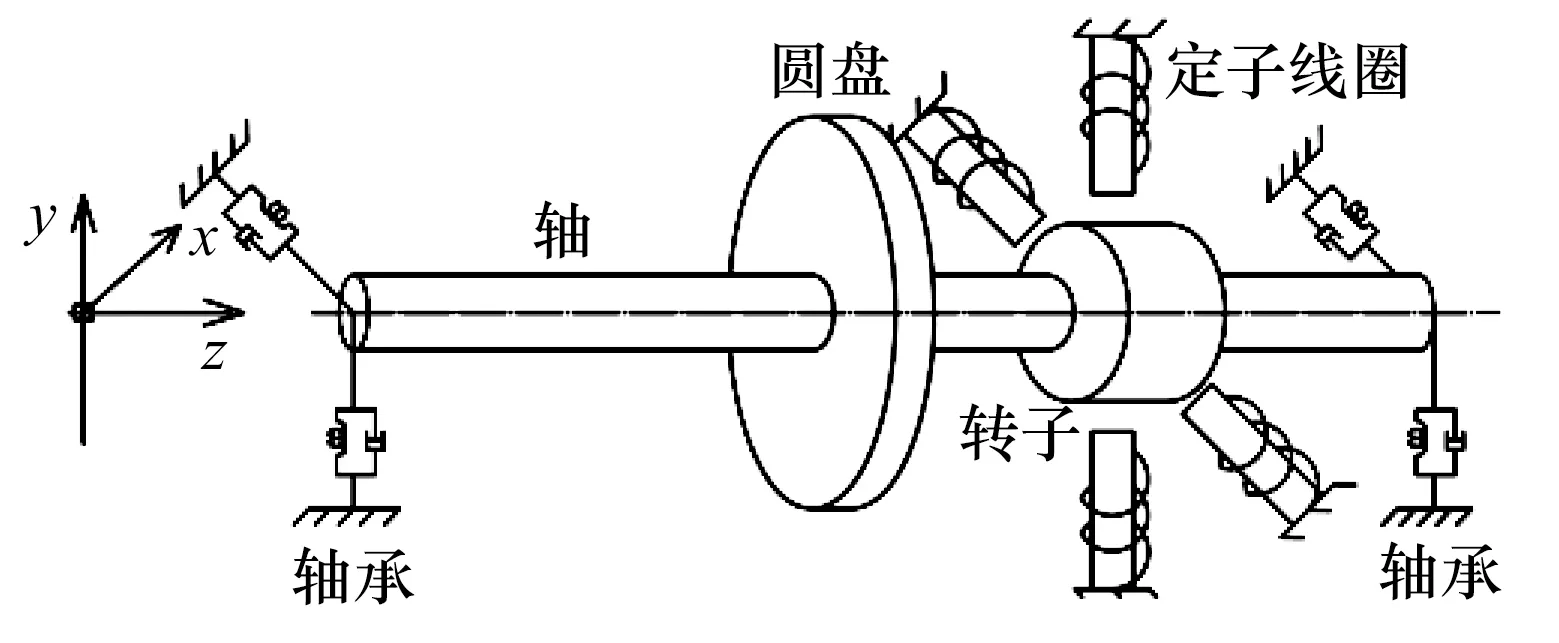
图1 转子-轴承-AMA系统示意图Fig.1 Diagram of rotor-bearing-AMA system
(1)
式中:M,C,K分别为系统的质量矩阵、阻尼矩阵和刚度矩阵;Z为位移列向量;F1为广义干扰力,包含不平衡力Fd和不对中力Fc;F2为主动控制力,包含电磁力Fmag。
圆盘结点处所受不平衡力如图2所示,O为转轴形心,O1为圆盘形心,不平衡力可表示为
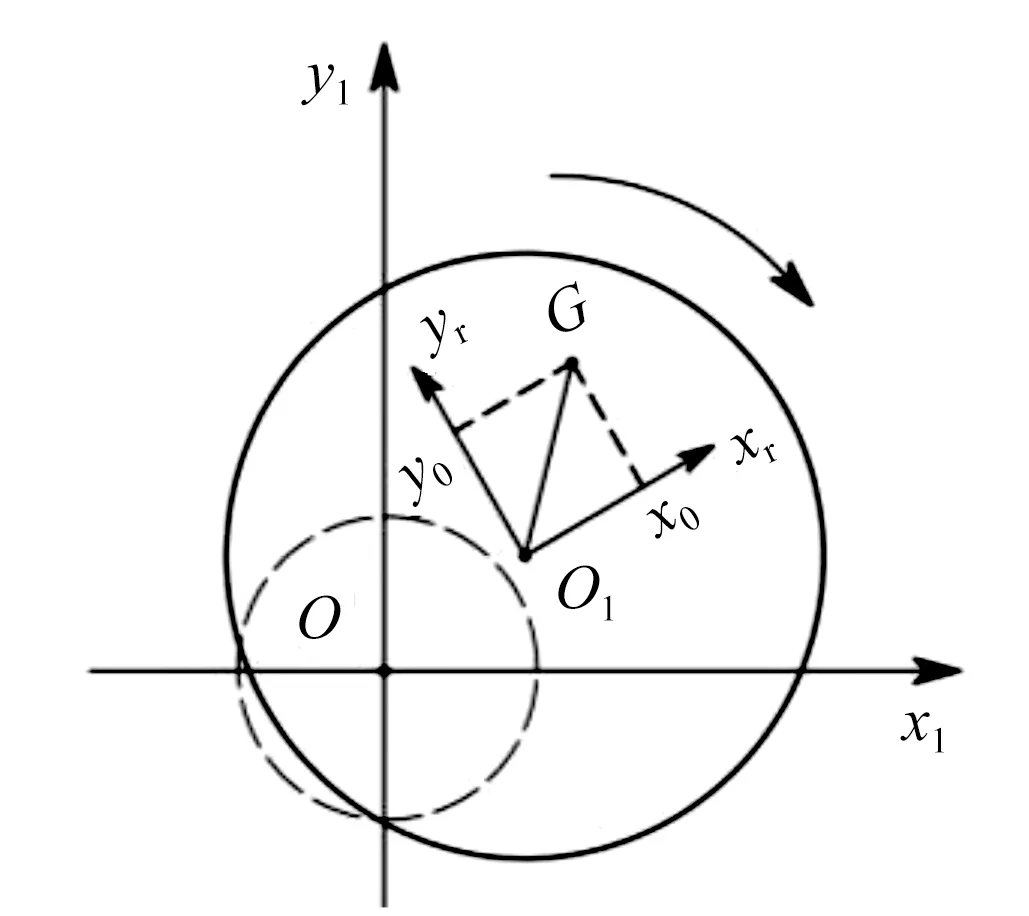
图2 转子不平衡示意图Fig.2 Diagram of rotor unbalance
(2)
式中:md为圆盘偏心质量;ω为转子角速度;t为时间;(a0,b0) 为质心坐标。
考虑轴系连接处的平行不对中力,以二倍频为主,采用等效轴段法建立联轴器模型,如图3所示,O2为转轴对应半联轴器的形心,O3为电动机对应半联轴器的形心,A为半联轴器和联轴器中间轴的螺栓连接点。令不对中偏差量坐标为(δx,δy),联轴器径向刚度取Kc,不对中力可表示为[13]

图3 联轴器平行不对中示意图Fig.3 Diagram of coupling parallel misalignment
(3)
采用12极E型结构AMA,其y方向结构如图4所示,y方向上下电磁力合力可表示为
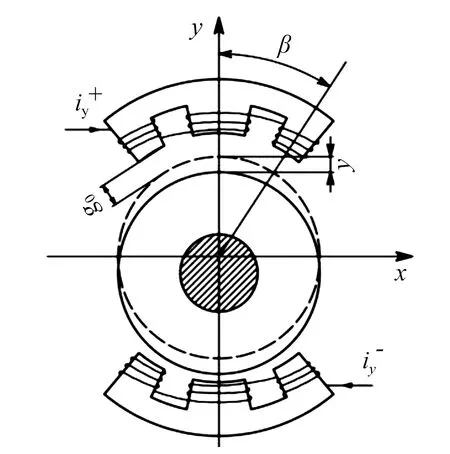
图4 AMA y方向结构图Fig.4 Structure diagram of AMA along y direction
(4)
ka=49μ0N2A02(1+cosβ)/128,

(5)
Ks=4kai02/g03,
Ki=4kai0/g02,
式中:Ks为位移刚度;Ki为电流刚度。
假设x,y方向气隙均匀,磁极面积相同,忽略2个方向的磁场耦合和漏磁,可认为2个方向位移刚度和电流刚度相等,则
-Ksza+Kiic,
(6)

干扰力和控制力需要通过变换矩阵将局部坐标系下的力转换至整体坐标系下,即变换成与 (1) 式阶数相同的矩阵。以电磁力为例,通过变换矩阵Tc可得
(7)
对(1)式变化可得
(8)
新的刚度矩阵可表示为
(9)
1.2 状态空间方程
为便于求解运动方程的瞬态解,将上述的有限元方程转换为状态空间方程,定义状态空间向量为
(10)
(11)
将(11)式转化为一阶微分方程形式,代入(10)式可得
(12)
Bsu=[0M-1]T,
式中:As为系统矩阵;Bsa,Bsu分别为电磁作动器电流和干扰力的输入矩阵。
2 控制律及滤波器设计
考虑旋转机械系统的多频振动,将振动故障的靶点表示为[11]
Θ(EN1,EN2,…,ENn;IN1,IN2,…,INn;QN1,QN2,…,QNn),
(13)
式中:EN为能量流层面的特征参数(如执行机构的驱动能量等);IN为信息流层面的特征参数(如控制系统中的参数信息等);QN为物质流层面的特征参数(如系统中的介质等)。
结合旋转机械中能量流、信息流和物质流的特征,搭建旋转机械实时状态监测系统,采用多频振动响应的特征频率、幅值、相位等参数来表征振动故障靶点,针对试验台实时频谱瀑布图中较为突出的工频和二倍频,分析其机理,准确定位靶点,有针对性地选择和设计控制律和滤波器,抑制不平衡和不对中故障引起的多频振动。
2.1 控制律设计
比例积分微分(Proportional Integration Differentiation,PID)控制属于经典线性控制器,是最早应用于磁轴承的控制技术。以y方向采样序号为n时的位移信号y(n)为例,设期望输出为yd(n),系统偏差e(n)=yd(n)-y(n),则PID控制算法的时域控制律为
(14)
式中:kP为比例系数;Ts为采样时间;kD为微分系数;t为采样时刻。
考虑到实时控制系统对(14)式离散并整合调整参数后得到离散PID表达式为
(15)
式中:KP为比例增益;KI为积分增益;KD为微分增益。
积分控制主要用于消除系统静态误差选取不当易引起的超调或积分饱和,考虑多倍频周期振动的主动抑制,采用PD控制算法,即令Ki=0,则 (6) 式中局部坐标系下的控制电流为
(16)
式中:KP为比例增益二阶对角矩阵;KD为微分增益二阶对角矩阵。
将(16)式整合到系统运动方程(8)式中,得到基于PD控制律的系统刚度矩阵K0、阻尼矩阵C0为
(17)
(18)
此时,系统运动方程为
(19)
根据(17)—(19)式,通过调整比例增益和微分增益改变系统刚度和阻尼,以实现控制系统振幅。
2.2 滤波器设计
陷波滤波器采用二阶(N=M=2)无限脉冲响应数字滤波器,其递归方程为
(20)
式中:ak和bl为多项式系数,考虑到多转速控制以及精确靶向抑制的需要,多项式系数通过实时转速和陷波带宽实时查表确定;yf(n)为n时刻对位移信号y(n)的滤波处理值。
3 仿真分析
3.1 有限元模型
转子-轴承-AMA系统模型主要参数见表1,根据第1节系统建模公式建立有限元模型,将整个系统划分为11个Timoshenko梁单元,如图5所示。设不平衡力作用在圆盘(9#节点)处,平行不对中力作用在联轴器(3#节点)处,主动电磁控制力施加于AMA(7#节点)处。

图5 转子-轴承-AMA系统模型Fig.5 Model of rotor-bearing-AMA system

表1 转子-轴承-AMA系统模型主要参数
3.2 算法控制效果
仿真过程中,取系统采样频率fs=10 kHz,转
子转频f=100 Hz,比例增益KP=4×107,微分增益KD=10,基于MATLAB仿真分析得到AMA 7#节点控制前后的轴心轨迹和频域曲线如图6所示:1)在控制器激发后,经过衰减振荡(收敛过程),轴心轨迹更趋向坐标原点且保持稳定;2)振幅减小,工频和二倍频成分得到显著抑制。说明该算法对不平衡-不对中耦合振动具有较好的抑制效果。

图6 AMA 7#节点控制前后的仿真结果Fig.6 Simulation results before and after AMA 7#node control
4 试验验证
建立转子-轴承-AMA系统试验台如图7所示, 1#,2#测点分别装有2套电涡流位移传感器,3#,4#测点分别装有1套电涡流位移传感器。可倾瓦滑动轴承五瓦均布,且采用瓦块上承载、中心支承的方式。系统采样频率fs为10.24 kHz,其他参数同表1。

图7 转子-轴承-AMA系统试验台Fig.7 Test rig of rotor-bearing-AMA system
(16)
式中:FG为AMA提供的y方向支承力。偏置电流i0=1 A,试验中取im=0.1 A。
在多个转速下对转子振动进行实时主动抑制以验证所提算法对转子不平衡和不对中振动抑制的有效性。采用试凑法选取PD控制器参数:比例增益KPx=KPy= 2×104,微分增益KDx=KDy=15。得到1#测点y方向多转速控制前后振幅如图8所示,该算法对不同转速的转子振动均有较好的抑制效果,各转速下转子振幅降低幅度在43.8%~56.0%之间。当转速大于1 350 r/min时,振动抑制率减小,说明PD控制算法鲁棒性不强。
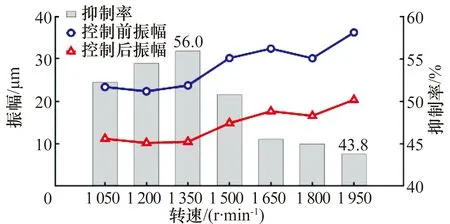
图8 1#测点y方向振幅多转速控制对比图Fig.8 Comparison diagram of amplitude multi speed controlin y direction of 1# measuring point
在转速为1 950 r/min时各测点试验结果如图9所示, 由图9a、图9b、图9c可知在第10 s施加电磁控制力后,转子-轴承-AMA系统各测点振幅均得到抑制,说明了该算法的有效性,由图9d可知经陷波滤波器滤波后噪声现象得到明显抑制。

图9 各测点试验结果Fig.9 Test results of each measuring point
转速为1 950 r/min时1#测点y方向频域瀑布图如图10所示:1)陷波滤波器对噪声的滤波效果显著,各频段内噪声明显,虽然每个频率下噪声都不大,但累计之后对控制效果影响较大,这也是采用陷波滤波器的原因。2)在恶劣工作环境下转子系统噪声明显,在第10 s施加控制后,振动一二倍频成分得到抑制,说明该算法能有效抑制不平衡和不对中故障引起的振动。

图10 1#测点y方向瀑布图Fig.10 Waterfall diagram in y direction of1# measuring point
5 结论
针对转子-轴承-AMA系统的不平衡-不对中耦合故障,设计了基于AMA的PD控制算法,建立控制系统仿真模型。在试验中设计陷波滤波器,以振动的工频和二倍频成分作为耦合故障的靶向抑制目标,对转子振动进行主动抑制试验。根据仿真和试验结果得出以下结论:

1)从时域和频域控制结果来看,离散PD控制器对多自由度、多转速运动转子轴系的不平衡-不对中耦合振动有较好抑制效果。
2)针对靶向抑制所选用的离散PD控制器结构简单,鲁棒性较差,随转速增大,其振动抑制率可能会减小。
3)陷波滤波器能有效提取相应倍频,抑制振动信号的噪声,且可根据实时转速改变陷波频率,满足多转速运行的需求。
猜你喜欢
心理学报(2022年10期)2022-10-12
中老年保健(2022年1期)2022-08-17
广西医科大学学报(2022年6期)2022-07-13
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
保健医苑(2022年5期)2022-06-10
中国典型病例大全(2022年7期)2022-04-22
湖北大学学报(自然科学版)(2021年5期)2021-08-20
北京航空航天大学学报(2021年6期)2021-07-20
西江文艺(2017年15期)2017-09-10
