科研成果融入实验教学的研究与实践
——以《船舶控制系统》课程为例
2022-06-15 08:38宋吉广梁利华吉明
教育现代化 2022年11期
宋吉广,梁利华,吉明
(哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨)
一 引言
科教融合的概念由德国教育家Wilhelm Humboldt 在十九世纪首先提出[1]。促进教学与科研的协同发展,增进教学与科研的有机融合是高等学校培养高素质人才的重要途径[2]。“学然后知不足,教然后知困”,教学和交流过程中会发现值得研究和急需解决的新问题和新对象,而科学研究也必然会为教学提供新观点、新内容。
2015 年5 月,国务院办公厅发布的“关于深化高等学校创新创业教育改革的实施意见”文中明确提出要推进教学、科研与实践的紧密结合,把最新科研成果和学术发展有机融入教学[3]。2019 年10 月,教育部发布的“关于深化本科教育教学改革全面提高人才培养质量的意见”文件中明确提出“强化科研育人功能,推动高校及时把最新科研成果转化为教学内容,激发学生专业学习兴趣”[4]。
在科教融合方面,教育工作者已经进行了理论和实践上的有益探索[5-9]。文献[6]分析了科研与教学之间内在的差异。为了科教融合,作者提出必须重新认理解和认识教学,使教学能够获得与科学研究一致的属性。文献[7]分析了三种不同的科研与教学的融合方法。文献[9]以相互促进一流学科建设和实验教学任务为目标,提出由教师设计开发实验教学所用设备。
作为“三海一核”人才的重要培养基地,哈尔滨工程大学很多专业课的设置与船舶与海洋相关。作为“自动化”专业的主干课,《船舶控制系统》以船舶的操纵性和耐波性为基础,讲授船舶的运动及姿态控制,是自动控制原理在船舶方面的典型应用。到目前为止,在《船舶控制系统》教学中,并未充分地将前沿的科研成果和科研思维融入教学中,未充分引导学生的科研兴趣,未充分调动学生的学习热情。形成这一现象的一个原因是教师从事的科研活动与教学课程没有实现较好的匹配。
受制于场地和经济因素,《船舶控制系统》的实验课几乎不可能在实船上进行。同时该课程的专业性决定了实验教学设备很难直接采购,而开发相关的教学仪器成本高、周期长。将科研成果应用于《船舶控制系统》实验课程教学,通过对科研样机的改造可以构建半实物仿真系统,能够有效地提高学生掌握船舶控制系统中典型装置的原理、结构和设计过程。将最新的科研成果融入教学,能够培养学生的科研兴趣,提高学生的科研能力,了解最新的科研和试验成果,扩宽自动化专业学生在该领域的视野,对未来走向全国各行业的自动化专业的学生的科研能力具有很好的促进作用。
二 实验课程要求
作为“自动化”专业的主干课,《船舶控制系统》以船舶的操纵性和耐波性为基础,讲授船舶的运动及姿态控制,是自动控制原理在船舶方面的典型应用。
船舶操纵性主要是指船舶在操纵人员手动或者自动操纵控制装置的作用下,保持或者改变其原来运动状态的性能。这里面包含相互制约的两个方面:一是船舶以一定的航行速度尽量保持直线前进。二是为了避免碰撞,保证船舶的航行安全,则需要船舶在控制装置的作用下按照操纵人员的要求及时、迅速、准确地改变其原来的航速或者航向。
船舶耐波性是指船舶在风浪等外力作用下产生摇荡和砰击、上浪、失速等现象时仍具有足够稳性和结构强度,并能保持一定航速安全航行的性能。剧烈的横摇运动会增加船舶航行阻力,增加燃料消耗;导致船上人员晕船,降低其工作效率;增大货物损失的风险,严重时甚至会导致船舶倾覆。
船舶控制系统的实验课程设置中,包含四个重要的实验即操纵性模型参数的获取、航向控制器的设计、横摇运动模型参数的获取和横摇控制器的设计。前两个实验属于船舶操纵性的内容,而后两个实验属于船舶耐波性的内容。由于不具备实船实验的条件,以往实验中操纵性模型参数的获取和横摇运动模型参数的获取均通过之前实船试验曲线进行计算。实船试验曲线有限,导致实验数据和实验报告雷同。同时,横摇控制器和航向控制器的结果通过数字仿真以曲线的形式显示。使得《船舶控制系统》课程的实验课,类似于理论课程的一次简单应用,不能锻炼学生的动手能力,不能有效加深学生对理论内容的理解,不能有效激发学生的科研兴趣。
在《船舶控制系统》实验教学中,如何培养学生的科研兴趣,提高学生的科研能力,了解最新的科研和试验成果,扩宽自动化专业学生在该领域的视野是比知识本身更重要的任务。
三 科研成果对实验课的融入
(一) 科研设施与科研条件
哈尔滨工程大学船舶减摇与控制技术研究所一直从事船舶减摇和船舶姿态综合控制技术的研究。通过多个预项目、科研项目的实施,目前实验室拥有四条船舶模型、两台六自由度船舶运动模拟台。同时具有自动舵和舵机、减摇鳍实物和样机、船舶运动试验小型水池、海洋环境仿真系统等,以往这些设施主要服务于科研工作。在项目和设施的支持下研究所在船舶运动模型的建立、船舶水动力导数的获取、环境扰动模型的建立与仿真、船舶操纵性、船舶耐波性、以及操纵性和耐波性的联合控制方面获得了丰富的科研成果[10-11]。
(二) 科研设施的改造
1.船舶操纵性实验
利用实验室现有的六自由度船舶运动模拟台、具有舵和螺旋桨的自航模、计算机构建操纵性实验半实物仿真系统(如图1 所示)。整个系统由以下四个部分组成:

图1 船舶操纵性实验装置组成框图
(1)环境仿真子系统
根据设定的环境扰动,如波高、浪向、风速、风向、流速、流向等条件和教师设置的船舶模型,计算六个自由度的干扰力和干扰力矩。
(2)船模子系统
船模放置在船舶运动模拟台之上,船模子系统由双桨、双舵、四个鳍及其各自的驱动器和伺服电机组成。船模控制器由小巧而坚固的工业化控制与采集系统NI-cRIO(National Instruments-CompactRIO)构成,通过WiFi 接收学生PC 机产生的控制指令,通过工业总线EtherCAT 和CANopen驱动舵、鳍、桨等执行器跟踪控制指令。同时NIcRIO 根据电机编码器反馈的执行器状态(舵角、鳍角和螺旋桨转速)和教师设置的船舶模型,产生六个自由度的控制力和控制力矩。
(3)船舶运动模拟台子系统
船舶运动模拟台子系统主要组成部分是一个六自由度并联Stewart 平台。该子系统的PC 机接收干扰力和干扰力矩、控制力和控制力矩、船舶模型参数、初始位置等信息,计算出船舶六个自由度的位置和速度,即经纬度、垂荡值、横摇角、纵摇角、首向角以及各个自由度的速度。
由于Stewart 平台的运动空间小,并不能够完整复现船舶在无限海域中的首向、纵向和侧向等运动运动状态。因此,在这几个自由上需要加入洗出算法[12-13],以便将船舶的运动姿态转换为平台可以实现的姿态,并尽量真实的模拟船舶运动。经过洗出算法获得的船舶姿态送入PMAC(Programmable Multi-Axes Controller),由PMAC 完成反解运动获得的六个伺服电动缸的位移,并实现伺服电动缸的闭环控制。
平台上除了安装船模外,中心位置还安装有IMU(Inertial Measurement Unit)测量船模的运动姿态,对Stewart 平台的反解计算进行验证。同时IMU测量的位置、速度融合船舶运动模拟台子系统对船舶位置的计算,给出经纬度、垂荡值、横摇角、纵摇角、首向角以及纵荡速度、横荡速度、垂荡速度、横摇角速度、纵摇角速度和首摇角速度发送给人机交互子系统的学生PC 和三维显示PC。
(4)人机交互子系统
人机交互子系统中的学生PC 和教师PC 均可设置和显示环境扰动参数,而船舶模型参数对学生是一个黑箱,由教师PC 进行设置。学生PC 可以接收船舶运动模拟台子系统给出的经纬度、垂荡值、横摇角、纵摇角、首向角以及纵荡速度、横荡速度、垂荡速度、横摇角速度、纵摇角速度、首摇角速度。也可以接收舵、鳍等执行器的角度和螺旋桨等执行器的速度。
在随动操纵模式下,学生PC(图2)可以通过舵轮和车种推杆对舵角和螺旋桨转速进行控制。在自动模式下,学生可以编写航向控制程序(自动舵)、减摇控制程序、Z 型试验程序、平行移船实验程序等完成对船舶模型姿态和执行器的控制。三维显示PC 同时可以接收船模子系统发送的执行器状态,驱动三维显示中的舵、鳍和螺旋桨产生相应的运动。

图2 学生PC 控制台与三维显示PC 界面
2.船舶耐波性实验设备
由于Stewart 平台可以模拟船舶的横摇运动,同时船模子系统配备了减摇鳍,上述实验装置可以进行船舶的耐波性实验。然而利用实验室的水池和船模(图3)可以更真实地进行耐波性实验。

图3 船舶耐波性实验设备
该实验设备可以通过PC 机采集安装于船模中的IMU 发送的横摇角和横摇角速度、控制干扰模拟装置使船模产生强迫横摇运动、控制减摇鳍的运动。
(三) 科研成果和科研思维的引入
将船舶控制的科研成果转化为《船舶控制系统》实验课教学内容,引入最新的研究成果,可以对实验课内容进行创新,拓宽课程内容,培养学生的科研兴趣。如将舵鳍联合控制的内容引入可以使学生更深入了解船舶运动之间的耦合,将自动控制原理中MIMO 系统的设计融入到操纵性和耐波性的综合控制问题,完成知识进阶。
科研的过程包含提出问题、分析问题并解决问题。科研思维符合元思维特征,是一种抽象了的思维[14]。通过将科研思维的内化,转换为教学元思维,从而实现从封闭的教学思维向动态教学元思维的变化。在实验课教学不要首先把科研过程和科研成果呈现给学生,而是要形成一种设疑思维,探讨为什么会提出这样的科研问题,以问题意识贯穿实验课过程。与此同时不断总结思考实验难题和问题, 凝练新的问题,从而使师生的思维共同发展。
四 实验的实施
(一) 船舶操纵性实验
操纵性实验首先要在无干扰的条件下获得船舶操纵性的野本模型参数,然后根据模型参数设计自动舵控制程序,加入海浪、海风和海流等环境干扰,验证自动舵控制程序是否达到了预期目标,如果没有达到,需要找出问题并解决问题。
如前所述,应以问题意识贯穿实验课过程。让学生自己选择是通过“Z 性操纵实验”或“平行移船实验”来获得模型参数,并给出选择的原因。学生可以更明确实验的实施条件和过程、模型的限制等,如“平行移船实验” 只能建立低频模型,并不适用于高频模型的建立,而要建立高频模型,可利用正弦操舵实验来进行。通过对这些问题的思考,使学生不仅知其然而且知其所以然,同时也培养了学生的问题意识。通过执行自己编写的实验程序来获得舵角和航向随时间变化的数据,根据这些数据获得了野本模型的参数。
相对于执行实验程序,很多学生更喜欢尝试以随动方式对舵和螺旋桨进行控制,同时观察三维显示PC 上船舶的姿态和航迹。通过随动方式,学生可以更深入了解操纵性方程的大惯性特点,对回转过程中的横倾和降速有更直观的了解。
海上航行的船舶不仅受到低频海风和海流的扰动的影响,还会受到高频海浪扰动的影响,因此在自动舵的设计中可以同时考虑这样的影响。通过实际船舶中自动舵对环境扰动的处理,引导学生将前面学习的知识贯通,了解船舶操纵性是一个惯性很大的低通特性环节。首向运动对低频扰动响应幅值比较大,而对高频干扰响应比较弱。因此在自动舵设计中,将海浪扰动参与控制,必然会引起频繁地动舵。导致增加了操舵引起的航行阻力,同时要求舵机有较高的响应频率,从而增加了功率的要求。
通过学生对包含高频干扰和不包含高频干扰的自动舵的设计、验证和对比,加深对实际工程问题的了解,避免知识的僵化。
(二) 船舶耐波性实验
耐波性实验首先要在无干扰的条件下获得船舶横摇运动模型的参数,然后设计减摇鳍控制程序。通过干扰模拟装置,强迫船舶产生横摇,再通过减摇鳍的运动来减小横摇运动。
首先让学生了解横摇衰减试验的原理,提出横摇角速度和阻尼力矩之间有什么关系?通过设疑思维,加深学生对实验背后理论知识的理解。然后使船模倾斜超过15 度进行衰减试验,通过PC 机采集的横摇角和横摇角速度随时间变化曲线,获得船舶的横摇运动参数。普通减摇鳍依靠升力来产生稳定力矩克服环境扰动力矩,只有船舶具有航速时才能够减摇,而且在设计航速之下,航速越高效果越好。在两项国家自然科学基金和科研项目的支持下,基于阻力原理的零航速减摇鳍在实船上已经获得应用。
从海洋工程船、科学考察船对零航速减摇的需求出发,通过学生了解零航速减摇鳍的科研过程,引导学生如何提出问题,分析问题和解决问题,培养学生的科研兴趣和科研素质。在建立横摇运动模型的基础上,根据零航速下鳍上稳定力的公式和减摇效果的要求,设计鳍运动控制程序。并在船模上对程序进行验证。PC 机可以采集减摇和未减摇时,船模的横摇角和横摇角速度随时间的变化数据,根据这些数据可以计算减摇鳍在零航速下的减摇效果。
五 科教融合的实施效果
在《船舶控制系统》实验课程的教学中,通过科教融合,不仅培养了学生的问题意识和科研思维。而且教学效果有了明显提升。
《船舶控制系统》课程在大四上学期进行,学生面临着找工作、考研复习、异地保研面试等很多占用学生精力与时间的事情,而实验课在理论课程完成后进行,通常距离考研日期只有半个月左右。导致教学效果尤其是实验课的教学效果不太理想,如何提高教学效果一直是课程组教师关注和希望解决的问题。
从2019 年开始,通过实验设施在实验课程中的应用,科研成果和科研思维的引入,最明显的感觉是实验报告的雷同率大幅下降。表1 列出了对两个班级的统计结果。
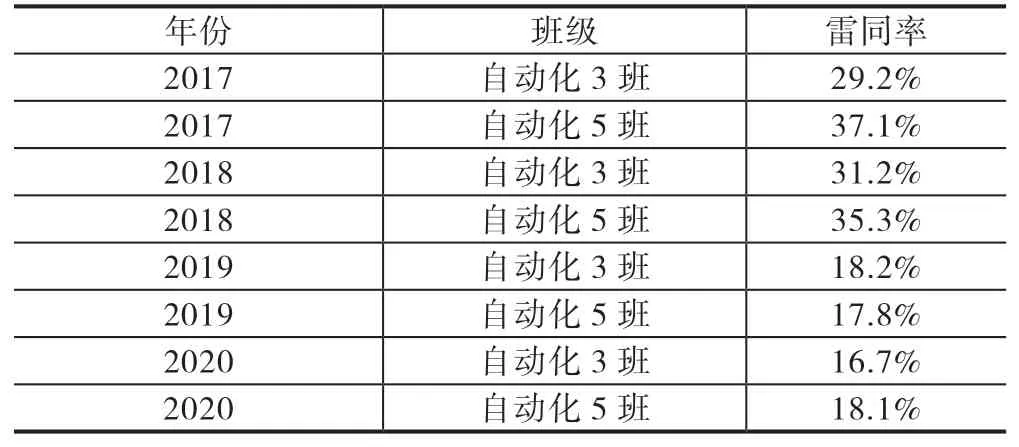
表1 实验报告雷同率统计
而专业课程达成度评价表(成绩定量分析法)中课程目标达成值分别由0.74 与0.75 提高到了0.79和0.80。
六 结语
将课题组的科研设备和大量科研成果融入到本科生《船舶控制系统》实验课程的教学中,是一次有益的研究与实践。通过科教融合,在实验教学中引入最新的科研成果,引入科研过程,使学生了解如何发现问题、分析问题并解决问题。可以开阔学生视野、增加学生对课程的兴趣。科研成果的融入,改善了课堂教学效果,提高了课程目标达成值。
相比于实验设施的构建和科研成果的引入,更重要的是科研思维进课堂。相比于低年级的教学中教师要具有设疑意识,用问题贯穿教学过程,高年级教学中更要重视培养学生的设疑意识,要敢于对老师的科研过程、科研成果和教学内容提出质疑。这对即将进入研究生阶段的学习的学生会有很大帮助。
由于《船舶控制系统》课程的专业性,如何更好地将科研成果和科研思维融入实验课教学是一个需要持续改进的过程。需要在教学互动中探索、实践和提高。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30
水运工程(2022年7期)2022-07-29
船舶(2021年4期)2021-09-07
新世纪智能(英语备考)(2020年3期)2020-08-11
小哥白尼(趣味科学)(2019年10期)2020-01-18
船舶标准化工程师(2019年4期)2019-07-24
中国船检(2017年3期)2017-05-18
中国卫生(2016年12期)2016-11-23
舰船科学技术(2016年1期)2016-02-27
中国舰船研究(2012年1期)2012-11-09