拍频振动对直升机尾操纵系统的影响
2022-07-03 05:59王哲人沈安澜
中国新技术新产品 2022年6期
王哲人 沈安澜
(中国直升机设计研究所,江西 景德镇 333000)
0 引言
某型直升机的尾操纵系统采用硬式拉杆设计,主要由尾操纵拉杆、拉杆连接摇臂、脚蹬组件以及串、并联舵机等组成,构成了1 个三维多刚体系统。在尾桨、主旋翼等旋转部件的激励下,会产生一系列动力学问题。
为适应现代工业中航空航天器等产品的需要,多体系统动力学从经典力学发展而来,并形成了以拉格朗日法和迪卡尔法为代表的2 类建模方法。其所建立的动力学方程能够清晰地反映出各种因素对位移、速度、加速度等动力学响应的影响。在工程中,当2 个激励频率相差接近20%时,尾操纵系统有可能产生拍频振动。拍频振动是由几个频率接近、振幅相当的简谐运动重新调制合成的一种力学现象。拍频振动的产生,会使尾操纵系统本身的结构振动加剧。
该型机在某次训练试飞中,驾驶员脚蹬处出现了接近1次/s 的低频振动。该文通过建立尾操纵系统的多刚体动力学方程,发现该低频振动是由尾桨转速频率和主旋翼一阶通过频率在幅值接近的情况下引起的拍频振动。为了解决该问题,该研究通过数值分析,调整了该型机的尾桨安装角,降低了尾桨转速频率下的侧向振动的振动幅值。试飞后发现拍频振动消失,问题得到解决。
1 理论分析
1.1 多刚体系统动力学
该型直升机的尾操纵系统如图1 所示。
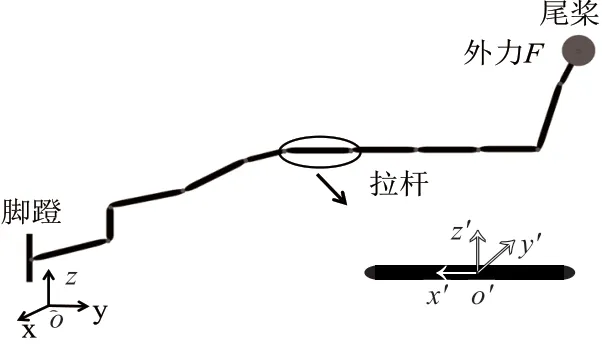
图1 某型直升机尾操纵系统示意图



以刚体数是3 时为例定义斜对称矩阵,如公式(2)所示。

对由个刚体构成的空间约束尾操纵系统,设全局坐标系为-,其中一点为,设欧拉参数为,则广义坐标如公式(3)、公式(4)所示。

进而得到公式(5)~公式(12)。

式中:为3×3 的单位矩阵。
因此得到个刚体构成的空间约束尾操纵系统,再考虑外力或外力矩下的运动方程,如公式(13)所示。

由公式(13)可知,该型直升机的尾操纵系统在任意一点处的位移都将受到外力及外力矩的影响。对该型直升机,其激励频率主要来自于尾桨、主旋翼和发动机等旋转部件产生的周期激励。尾操纵系统末端脚蹬处所产生的振动,则主要来自于尾桨和主旋翼。由其产生的激励会通过整个尾操纵系统传递至脚蹬处,构成了引起该型机脚蹬处振动的外力及外力矩。
1.2 拍频振动
对2 个简谐运动,如果频率接近、振幅相当,就会产生拍频振动。假设2 个简谐运动为、,如公式(14)、公式(15)所示。

式中:为时间参数;和、和以及和分别为2 个简谐运动的振幅、圆频率以及初始相位。
由公式(14)和公式(15)可知叠加后的拍频振动信号(),如公式(16)所示。

由三角函数关系整理所得,如公式(17)、公式(18)和公式(19)所示。
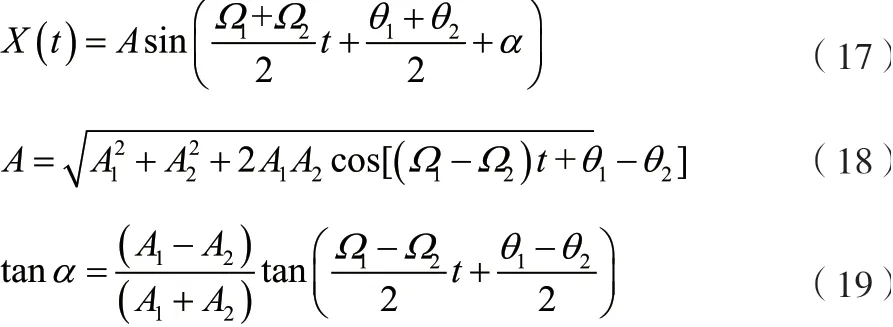
式中:为一个过渡量,其正切值如公式(19)所示。
根据圆频率与激励频率的关系,即如公式(20)所示。

由公式(18)可知,拍频振动的幅值介于2 个简谐运动幅值的和、差之间,如公式(21)所示。

由公式(18)和公式(1)可知,其受低频(-)/2调制,调制后拍频的周期如公式(22)所示。

设该型机尾桨的转速频率为,其中脚标w 为尾桨;主旋翼的一阶通过频率为,其中为主旋翼桨叶数。当这2 个相近频率的振幅也相近时,便会产生拍频振动现象。根据公式(20)可知,此时的拍频如公式(23)所示。

即产生频率为1.3 Hz 的拍。
2 数值分析
由公式(16)可知,在频率一定的情况下,拍频振动受2 个简谐运动的幅值和初始相位的影响。由于该型机通过尾操纵系统传递到脚蹬处旋转部件的激励频率和较为接近,所以在幅值和相位满足一定条件的情况下,驾驶员会在脚蹬处感受到拍频振动,即周期可数的低频振动,从而影响飞行舒适性。由这2 个频率产生的拍频振动信号如图2 所示。
其中,图2(b)和图2(c)的简谐运动方程,如公式(24)、公式(25)所示。

由图2(a)中点和点的时间差可知,1 个拍的周期如公式(26)所示。

由周期与频率之间的关系可知,此时的拍频如公式(27)所示。

图2中的算例给出了2 个幅值与相位相同的简谐波重新调制合成的拍频振动曲线。此时,设备和人所感受到的振动来自于调制合成后的外围包络线。由于在工程实际中拍频振动多会带来不利的影响,因此如何消除或者降低拍频振动是值得研究的。
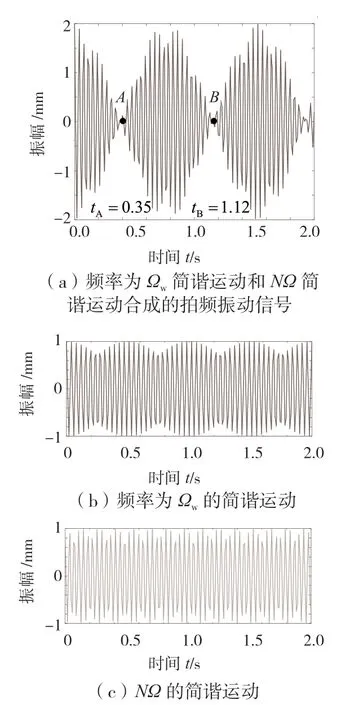
图2 拍频振动信号
保持频率为的简谐运动(以下称简谐运动)的幅值和相位不变,改变频率为的简谐运动(以下称简谐运动)的幅值,其拍频振动情况如图3 所示。
其中,2 个简谐运动的相位均为π/2 不变,简谐运动的振幅为1,简谐运动的振幅如图3(a)~图3(d)所示,分别为0.1、0.5、0.7 和0.9。
保持简谐运动的幅值和相位不变,改变简谐运动的幅值所形成的简谐运动的幅值和拍频振动情况,如图4所示。其中,2 个简谐运动的相位均为π/2 不变,简谐运动的振幅为1,简谐运动的振幅如图4(a)~图4(d)所示,分别为0.1、0.5、0.7 和0.9。
比较图3 和图4 可以发现,2 个简谐运动的幅值在相差50%以上时,拍频振动现象很弱。随着幅值的接近,拍频振动现象逐渐增强。当2 个简谐运动的幅值相差30%以内时,拍频振动现象相当强烈。且根据图3 和图4 还可知,调整任意某个频率的幅值,都可以消除或者减弱拍频振动现象,而具体调制哪个频率对拍频振动减弱的程度均无明显影响。因此,可以通过降低任意某个频率的幅值来消除或者减弱拍频振动。
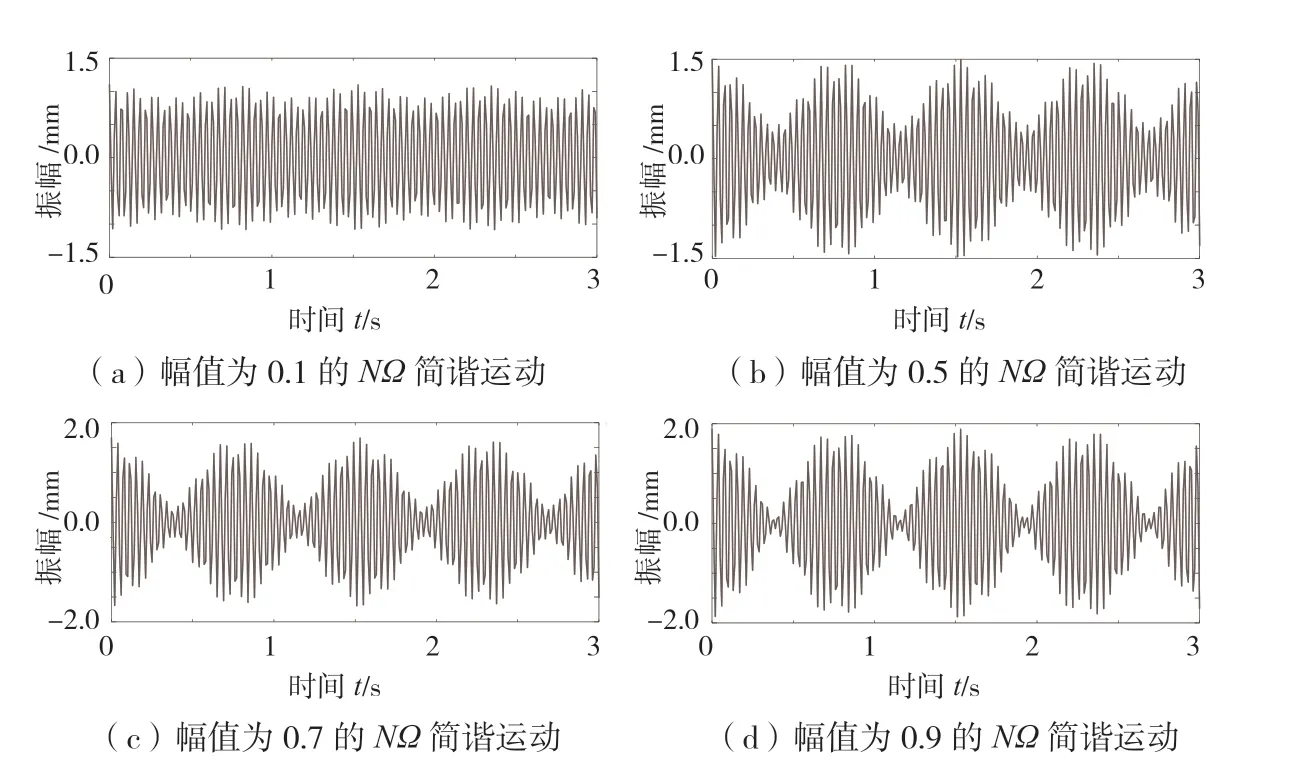
图3 相位相同情况下,NΩ 简谐运动不同幅值对拍频振动的影响
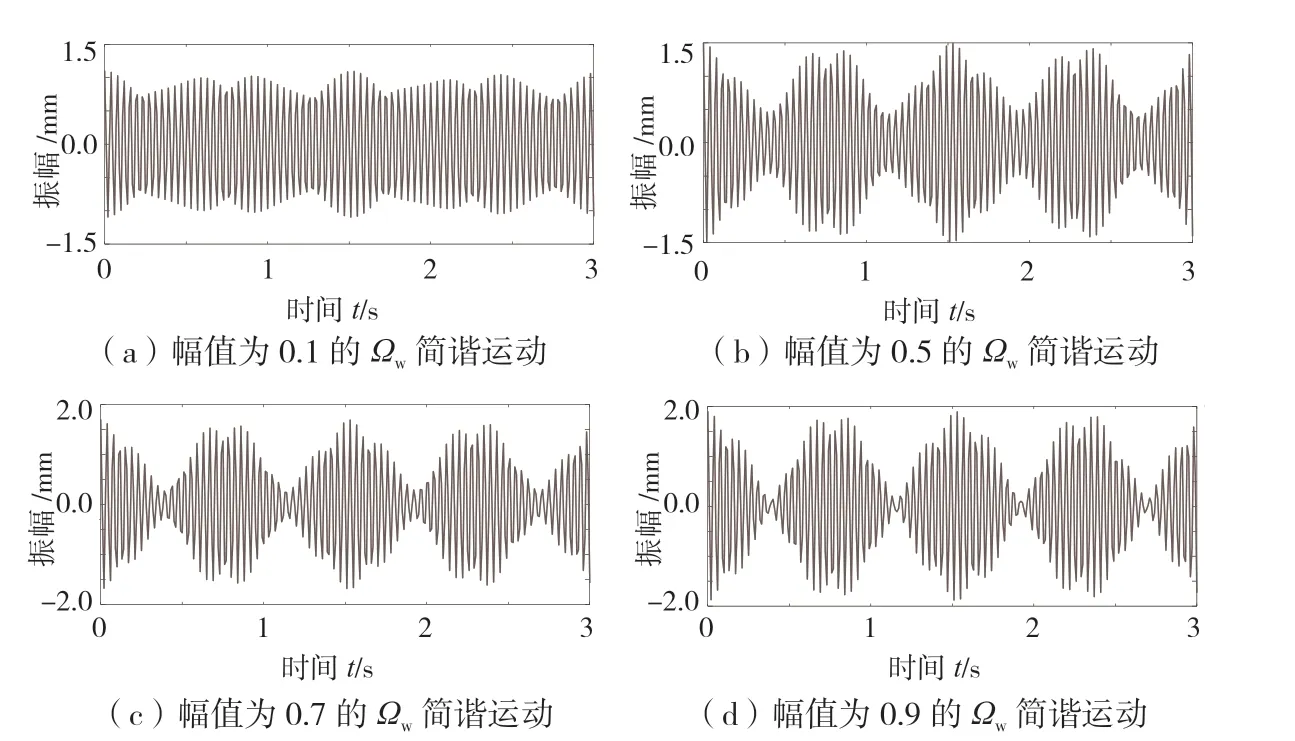
图4 相位相同情况下,Ωw 简谐运动不同幅值对拍频振动的影响
在简谐运动的幅值和相位不变的情况下,改变简谐运动的相位,所形成的拍频振动情况如图5 所示。
其中,2 个简谐运动的幅值均为1 不变,简谐运动的相位为π/2,简谐运动的相位如从图5(a)~图5(d)所示,分别为0、π/6、π/4 和π/2。
由图5(a)~图5(d)可知,在幅值不变的情况下,2个简谐运动的相位差由小到大变化时仅改变了波形的初始相位,对拍频振动的形成没有影响。当简谐运动的幅值和相位不变时,仅改变简谐运动的相位,规律一致,不再赘述。因此,若要消除或者减弱拍频振动的影响,通过改变简谐运动的相位是不能实现的。
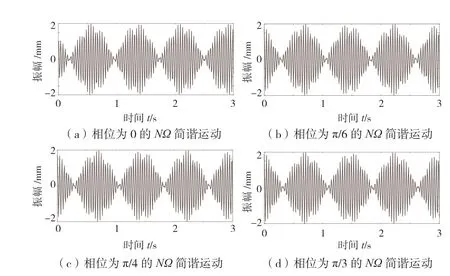
图5 幅值相同情况下,NΩ 简谐运动的不同相位对拍频振动的影响
3 试飞验证
该型直升机在训练试飞过程中,脚蹬处出现了接近1 次/s 的低频振动,对飞行员的飞行造成了一定的困扰。脚蹬处于尾操纵系统的末端,受尾桨的转速频率和主旋翼一阶通过频率的激励。当2 个相近频率的幅值相当时,尾桨处产生的振动响应通过尾操纵多刚体系统传递到脚蹬处,很容易产生拍频振动现象。因此,需要在脚蹬处布置三向振动传感器,监测脚蹬处的振动情况。对该振动,飞行员感受到的最直接的是垂直于脚面方向的振动,即脚蹬航向的振动。
该文选取某次产生低频振动飞行架次的脚蹬航向时域信号,根据第1 节和第2 节的分析可知,引起此次低频振动的可能是和形成的拍频振动现象。因此,该文在24 Hz~28 Hz 的频率下进行了巴特沃斯滤波处理,得到关心频率范围内的时域响应,发现存在较为明显的拍频振动现象。如图6 所示。
在图6 所示的10 s 的时间内有12 个周期完整的简谐波和2 个周期不完整的简谐波,可以近似认为在10 s 内产生了13 个周期完整的简谐波。所以,此时1 个完整简谐波的周期近似为0.77 s,频率为1.30 Hz,与公式(26)和公式(27)相一致。即引起此时拍频振动的频率为尾桨转速频率与主旋翼一阶通过频率。
为进一步分析2 个简谐波的幅值对拍频振动的影响,该文继续对图6 中的时域信号做傅里叶变换,进行频域分析,如图7 所示。由图7 可以看出,点和点的频率和的幅值相差29%。根据第2 节的数值分析可知,当2 个简谐波的幅值相差30%以内时会形成拍频振动现象。由此可以进一步断定,引起此次低频振动的原因为尾桨转速频率与主翼一阶通过频率在振幅接近的情况下形成的拍频振动。
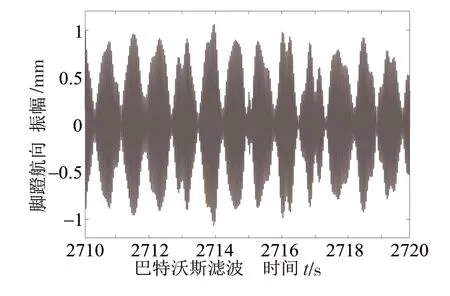
图6 脚蹬航向的巴特沃斯滤波
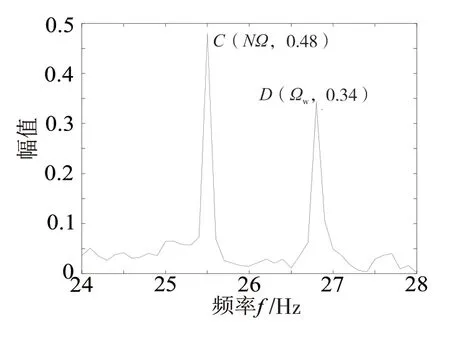
图7 频谱分析
而对拍频振动的2 个影响因素,幅值决定了拍频运动的剧烈程度,相位决定了合成运动的初始位置。因此,消除拍频振动影响的最好方式就是降低某一频率的振动幅值。然而通过对该直升机的尾桨地面动平衡、主旋翼的动平衡和空中椎体进行检查,发现各指标均在标准范围内。于是,该研究根据该直升机的特点,调整尾桨的安装角,降低了尾桨转速频率下的侧向振动幅值,从而降低了频率为的振动幅值。
调整后进行试飞,飞行员反映该次飞行低频振动现象明显消失。该研究继而选取相关的飞行数据,在24 Hz~28 Hz 的频率下进行巴特沃斯滤波处理,选取了一段时域信号,如图8(a)所示。发现在时域信号中已无明显的拍频振动。并对该段时域信号进行傅里叶变换,得到的频域信号如图8(b)所示。结合第2 节、第3 节的数值分析可知,点和点的频率和的振幅相差67%,不会形成拍频振动。
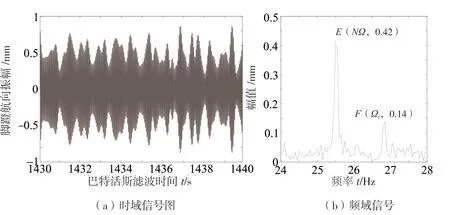
图8 调整后试飞的时域信号与频域信号
因此,对脚蹬处产生的拍频振动现象,可通过调整尾桨安装角,并降低尾桨转速频率振动幅值的方法,使2 个频率接近的简谐运动的振动幅值远离,从而实现消除拍频振动的目的。由于在直升机领域振源频率接近是一个常见现象,因此对设计人员及飞行员来说,应该时刻予以关注,以免因为拍频振动的产生而增加不必要的风险。
4 结论
某型直升机在训练试飞时,脚蹬处会产生接近1 次/s 的低频振动。该文通过建立直升机尾操纵系统动力学方程,找出引起脚蹬振动的振源为尾桨转速频率和主旋翼一阶通过频率。由于2 个频率较为接近,容易经过调制产生拍频振动现象。继而该文通过数值分析,提出了消除拍频振动的方法,并通过调整试飞得以验证。因此该文的主要结论如下:1) 直升机尾操纵系统是多刚体系统,其传递到脚蹬处的振动来源于尾桨与主旋翼的旋转激励。2) 当2 个简谐运动的频率接近、振幅相当时,会产生拍频振动现象。而通过调整任意某个频率的振动幅值,可以消除拍频振动。3) 通过调整直升机尾桨安装角,降低侧向振动幅值的方式,可消除在直升机脚蹬处产生的拍频振动现象。
猜你喜欢
航空学报(2022年2期)2022-03-29
教练机(2022年4期)2022-03-13
北京航空航天大学学报(2021年9期)2021-11-02
南京航空航天大学学报(2021年2期)2021-05-06
军民两用技术与产品(2021年9期)2021-03-09
新生代·上半月(2019年6期)2019-09-10
电子制作(2019年9期)2019-05-30
中国自行车(2018年7期)2018-08-14
北京航空航天大学学报(2016年8期)2016-11-16
海军航空大学学报(2015年1期)2015-11-11