具有阶段结构、时滞和捕获的渔业捕食系统动力学分析
2022-07-14 06:40章培军惠小健
扬州大学学报(自然科学版) 2022年2期
章培军, 张 慧, 王 震, 惠小健
(1. 西京学院计算机学院, 西安 710123; 2. 西安理工大学土木建筑工程学院, 西安 710048;3. 西北工业大学数学与统计学院, 西安 710072)
第一次世界大战结束后, 人们发现亚德里亚海中捕食鱼的数量比战前大幅增加[1].然而, 战争在很大程度上破坏了渔业, 为什么这有利于捕食者而不是被捕食者呢? 为了解决这个问题, 美国生物数学家Lotka Alfred James和意大利数学家Volterra Vito分别于1925年和1926年提出了著名的Lotka-Volterra模型[2].很多学者[3-6]在此基础上研究了影响捕食-食饵模型动力学行为的因素, 如功能反应、时滞、阶段结构和收获等,特别是这些因素的共同作用.研究结果表明, 鱼类种群的阶段结构是决定鱼类种群增长率和渔业可持续性的重要因素, 这一研究成果已应用于单物种[7-8]和多物种种群.对于多物种种群, 阶段结构分别应用于捕食者种群[9]、食饵种群[10]和两个种群[11].对于具有阶段结构的捕食-食饵模型, Wang等[12]考虑到幼年捕食者由成年捕食者照顾, 不需要自己捕食猎物, 从而提出了只有成年捕食者才能捕食食饵的假设.而在很多种群中, 比如海鱼在产卵后会抛弃受精卵, 因此新生的幼鱼必须自己寻找食物.此外,有些鱼类成熟缓慢,如太平洋蓝鳍金枪鱼, 大约需要2~4 a才能成熟,如果没有捕食, 这些物种在未成熟阶段就不可能生存下来.Gerasimova[13]考虑了幼年和成年捕食者分别以不同速度吞食食饵的情况, 对格兰德河中毛鳞鱼的春季喂养行为进行了详细观察和研究,发现幼年和成年的毛鳞鱼都吃桡足类动物,但捕食数量不同,并且成年的毛鳞鱼可以吃其他物种(如幼虾),有时也吃幼年的毛鳞鱼.
时滞微分方程是具有时间滞后的微分方程, 常用于描述既依赖于当前状态又依赖于过去状态的系统,其特点是充分考虑到系统的历史对现状的影响.近几十年来,对时滞微分方程的稳定性和分支的研究引起了许多学者的关注[14-16], 尤其是时滞会引起模型产生分支从而诱发周期解.Boonrangsiman等[17]研究了幼年捕食者和成年捕食者以不同速度捕食食饵系统的动力学行为,从而推广了阶段结构模型.
1 模型建立
在Boonrangsiman模型的基础上,考虑幼年和成年捕食者的不同捕获率, 以及幼年捕食者转变为成年捕食者所产生的时间延迟效应,建立模型
(1)
2 系统动力学分析
2.1 平衡点及其稳定性分析
定理11) 模型(1)存在平凡平衡点E1(0,0,0);
2) 模型(1)存在捕食者灭绝平衡点E2(K(r-d)/r,0,0);

定理21) 对任意τ≥0, 平凡平衡点E1(0,0,0)不稳定;
2) 对任意τ≥0, 当R< 1时, 捕食者灭绝平衡点E2(K(r-d)/r,0,0)不稳定; 当R>1时,E2(K(r-d)/r,0,0)渐近稳定;
特征方程为F(λ,τ)=|λE-J|=0, 式中E为单位矩阵.
1) 在E1(0,0,0)处.F1(λ,τ)=(λ-r+d)(λ+d1+qE)(λ+d2+qE)=0, 特征根分别为λ1=r-d,λ2=-d1-qE,λ3=-d2-qE.由于r>d, 故平凡平衡点E1(0,0,0)不稳定.

F3(λ,τ)=λ3+p2λ2+p1λ+p0+(q1λ+q0)e-λτ=0,
(2)
2.2 Hopf分支及其周期解
设λ=iω是方程(2)的根, 令ω2=z,有
f(z)=z3+m1z2+m2z+m3=0,
(3)


当f(z)中的系数满足条件
时, 方程(3)至少有一个正根.不妨设方程(3)有3个正根z1,z2,z3, 得

所以, 如果条件(H3):f′(z0)≠0成立, 那么横截性条件满足.根据Hopf 分支存在定理[20], 可得到下列结论.
3 数值仿真
当R>1时,有
捕食者灭绝平衡点E2(K(r-d)/r,0,0)渐近稳定; 当R<1时,则
3.1 捕获系数qE对系统动力学行为的影响
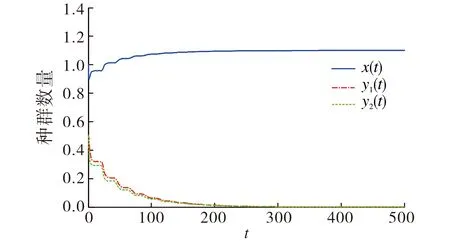
图1 当q=1, E=0.5时,捕食者灭绝平衡点E2渐近稳定Fig.1 When q=1, E=0.5 the predator extinction equilibrium E2 is asymptotically stable
3.2 时滞τ 对系统动力学行为的影响
当q=1,E=0.2时, 对系统(1), 容易验证,R=0.795 3<1, 系统(1)存在唯一正平衡点E3(0.829 1, 0.620 4, 0.464 1),p2=2.555 3>0,p2(p1+q1)-(p0+q0)=4.345 3>0, 即条件(H1)成立, 且p0-q0=0.856 0>0, 根据定理2(3)知, 对任意τ≥0,E3(0.829 1, 0.620 4, 0.464 1)局部渐近稳定.图2为τ取不同值时系统的轨线图.仿真结果显示, 轨线最终都趋于正平衡点E3(0.829 1, 0.620 4, 0.464 1).
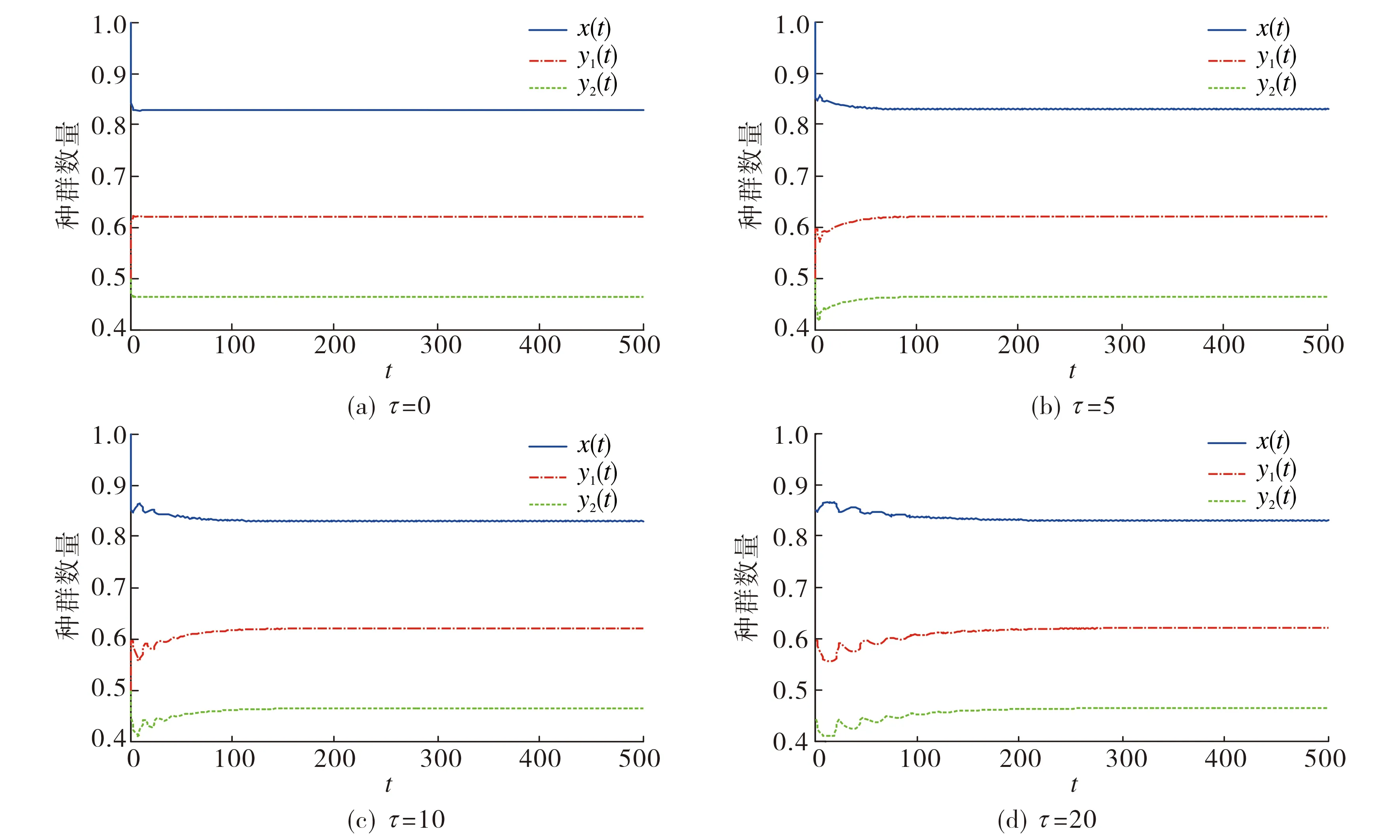
图2 τ取不同值时系统的轨线图Fig.2 Trajectory diagram of the system with different values of τ
当d1=0.3,d2=0.1,q=1,E=0.2时, 对于系统(1), 易验证,R=0.340 9<1, 系统(1)存在唯一正平衡点E3(0.375 7, 1.126 7, 0.875 3),p2=1.012 6>0,p2(p1+q1)-(p0+q0)=0.257 5>0,即条件(H1)成立, 并且p0-q0=-0.090 3<0, 可得方程(3)的系数m3=-0.024 7和唯一正实根z0=0.202 2, 从而有ω0=0.449 7,τ0=2.030 9以及f′(z0)>0.因此, 条件(H2)和(H3)成立.根据定理3, 取τ=2∈[0,τ0), 则系统(1)的正平衡点E2局部渐近稳定(如图3所示).
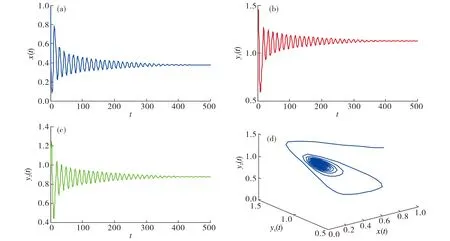
图3 当τ=20,τ0)时, 捕食者和食饵共存平衡点E3局部渐近稳定Fig.3 When τ=20,τ0), the equilibrium point E3 of the coexistence of predator and prey is locally asymptotically stable
取τ=2.3>τ0时, 系统(1)的捕食者和食饵共存平衡点E3将失去稳定性, 并产生Hopf分支, 在捕食者和食饵共存平衡点E3处分支出一簇周期解(如图4所示).
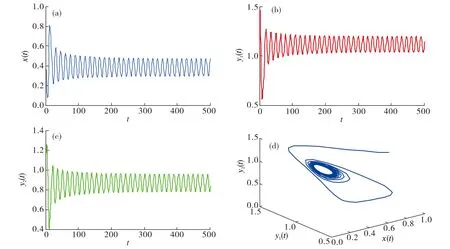
图4 当τ=2.3τ0时, 捕食者和食饵共存平衡点E3失去稳定性并且产生Hopf分支Fig.4 When τ=2.3τ0, the equilibrium point E3 of the coexistence of predator and prey loses stability and generates Hopf bifurcation
4 结语
对于只有1个食饵种群和2个捕食者种群(幼年阶段和成年阶段)的系统, 若存在从幼年阶段向成年阶段过渡的时滞,且2个阶段的捕食者捕食食饵的速度不同, 本文运用Holling Ⅱ功能性反应函数反映其消耗率, 建立了具有阶段结构、时滞和捕获的渔业捕食-食饵模型.通过对模型的动力学分析,得到了平凡平衡点、捕食者灭绝平衡点、捕食者和食饵共存平衡点等3类平衡点及其稳定性.

猜你喜欢
中北大学学报(自然科学版)(2022年4期)2022-09-23
吉首大学学报(自然科学版)(2022年1期)2022-08-11
吉首大学学报(自然科学版)(2022年1期)2022-08-10
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
百科探秘·海底世界(2020年11期)2020-12-31
初中生学习指导·提升版(2020年12期)2020-09-10
教育教学论坛(2019年27期)2019-07-30
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
上海师范大学学报·自然科学版(2018年3期)2018-05-14