高效残膜捡拾回收机的设计与试验*
2022-07-25 03:00王祎才席爱学李晓军孟学奇马海军马明义
机械研究与应用 2022年3期
杨 正,王祎才,席爱学,李晓军,孟学奇,马海军,马明义
(1.甘肃畜牧工程职业技术学院,甘肃 武威 733000; 2.甘肃洮河拖拉机制造有限公司,甘肃 定西 734001)
0 引 言
旱地全膜覆盖[1]技术的应用虽然达到了增产增收的目的,但随之而来产生了大量的废膜[2-3]。农田里面每年废弃的薄膜数量非常之大,如果不将之收集起来,每年会形成非常大的白色污染,而且回收的薄膜又可以重新制成薄膜,这对于节省资源意义非常重大[4]。
在白色污染日益严重的当下,农田残膜的回收一直是亟需解决的难题[5-6],国内外先后研制的滚筒式[7]、鼠笼式[8-9]、钉耙式[10-13]等都未能完美地解决。回收残膜一直是农业工作者未了的心愿。截止目前,市场上成型的残膜回收机具仍不能满足捡拾较高要求。
对旱地地表进行全膜覆盖,可有效接纳降水,增加地温,减少蒸发,并起到改善作物生长环境,提高水分利用率等效果。农业生产实践表明,全膜覆盖技术比不覆膜单产增幅超过30%,增产效果非常显著,经济效益良好,因而,在甘肃省得到非常广泛的推广。
“成也地膜,败也地膜”,曾经助推农业增产增收的地膜,如今却成了重要的土壤污染源。治理白色污染,刻不容缓。传统残膜捡拾回收机捡拾效率低、脱模困难。而人工捡拾,效率低,劳动强度大,费时费工。笔者在研制传统残膜捡拾机的基础上,通过校企合作共同研制开发,首次采用了反转旋齿式捡拾机构[14],模拟人工的作业过程,一次性捡拾率高达90%以上,可一次性完成残膜的捡拾、输送、卷膜等作业工序,是非常理想的捡拾机具。
1 整机机构与工作原理
1.1 整机机构
高效残膜捡拾回收机主要是由挑膜起膜机构、挂膜输送机构、卷膜卸膜机构等三大机构组成。其中挑膜起膜机构包括挑膜齿、挑膜架、挑膜板、起膜架、起膜定盘、起膜动盘等;挂膜输送机构包括输膜传动链、传动链轮、传动齿杆等;卷膜卸膜机构包括卷膜棍等。其具体结构如图1所示。

图1 高效残膜捡拾回收机组成
高效残膜捡拾回收机参数如表1所列。

表1 高效残膜捡拾回收机参数
1.2 工作原理
高效残膜捡拾回收机采用反转式起膜挑膜机构,模拟了人工使用钉齿耙勾拉动作,效率更高。人工使用钉齿耙勾拉时动作的方向是相反的,高效残膜捡拾回收机正好借用了人工的作业过程。具体的捡拾过程为:动力拖拉机带动机具不断向前运动,反转式起膜挑膜进行反转时挑膜齿插入土壤,挑起埋藏于土壤的农田残膜,由于挑膜齿的齿尖是尖锐的,能够将部分残膜挂起,并带动或拔起了另一部分残膜,并裸露于地表,随着反转时挑膜机构的不断挑膜,持续保持了残膜的捡拾过程。捡拾起的残膜输送至输送带,输送带上装有小钉齿,能够确保挂住残膜,并随着输送带的输送,将残膜上的土壤抖落,仅剩余残膜被输送至卷膜棍上[15-16],待卷膜棍卷入一定的残膜时,停机并将缠绕在卷膜棍上的残膜进行分离去除,由于卷膜棍为锥形,并加装液压脱模机构,所以很轻松就可以进行脱离。至此完成一个作业流程,如此往复进行捡拾残膜作业。
2 旋齿式反转挑膜机构
残膜捡拾机具的难点在于挑膜机构。人工利用钉齿耙挑膜时具有很好的捡拾率。反转挑膜机构就是模拟人工运动动作。利用平行四连杆机构将挑膜齿安装于齿杆上,并通过链轮传动反转,充分利用了挑膜机构里的“挑”,通过不断的挑起,保证了一次捡拾率90%以上,如图2所示。

图2 反转式起膜挑膜机构1.机架 2.轴承座 3.十字安装架 4.挑膜齿 5.挑膜架 6.挑膜架轴管 7.定盘固定杆 8.动盘 9.定盘 10.连杆
机架、挑膜架轴管两端设置安装架,安装架安装在机架中部,两个安装架之间安装挑膜架,挑膜架与挑膜架轴管平行,挑膜架轴管上垂直设置若干挑膜齿,一侧安装架上安装挑膜齿摆线运动装置,挑膜齿摆线运动装置使挑膜齿在机具前进时的运动轨迹为摆线运动并保持竖直向下,机架后下方倾斜设置送膜带。挑膜架和挑膜齿因与动盘、连杆的联动,在机具前进时挑膜齿的运动轨迹为摆线运动并保持竖直向下,达到挑膜齿完成挑膜、卸膜的运动,将地膜向前输送至送膜带,交错安装的挑膜齿能够有效提高残膜捡拾率。反转平行四连杆挑膜机构与输送带的安装位置如图3所示。

图3 反转平行四连杆挑膜机构与输送带的安装位置
2.1 运动分析
(1) 钉齿齿尖做余摆线运动,只要在满足反转挑膜机构的转速大于机具前进的速度的情况下,钉齿齿尖的运动轨迹才能形成余摆线的闭环曲线,闭环曲线的宽度E由垂直入土式穴播机沿x方向前进的速度Vm和钉齿齿尖绕着O点圆周运动的切线速度V之比值来确定,即有以下公式:
(1)
根据图4所示,只有λ值大于1时,余摆线轨迹才能相交,从而形成闭环曲线。满足挑膜轨迹密集要求,从而保证捡拾效果。

图4 不同λ值对应的曲线轨迹
钉齿齿尖垂直插入、拔出时:当B点运动至br时为插入行程,br点至bC点为拔出行程。闭环曲线上最大的圆弧brbC点的绝对速度Ur是垂直向下的。而bC点此时的绝对速度却是向上的。闭环曲线一半的高度应为挑膜深度S=50 mm,闭环曲线上最大的宽度E是B点在钉齿齿尖运动过程中Tr时刻至TC时刻沿着x方向上最大的移动量。
(2) 机具沿着x方向上前进的速度是Vm=500 mm/s,钉齿齿尖的切线速度则是V=Rω,此时钉齿齿尖的余摆线运动轨迹方程式为:
(2)
式中:R为钉齿齿尖铰接点至起膜架轴之间的距离(长连杆的长度为200 mm)。
(3) 闭环曲线最大宽度brbC的距离计算:
钉齿齿尖轨迹如图5所示。

图5 钉齿齿尖轨迹



推导后得:θr=π-arcsinλ
θC=arcsinλ
将θr和θC代入摆线方程式中,即:
xr=R(λ(C-θb)-cosθb)
xC=R(λθb+cosθb)
计算得闭环曲线最大的宽度E:
(4) 对钉齿齿尖插入土壤时进行分析。
如图6所示,钉齿齿尖插入土壤中,理想状态下穴形孔位呈现“V”字形,然而由于土壤的挤压或地膜的滑移等因素,使得成穴器的形状呈现不规则的穴形。
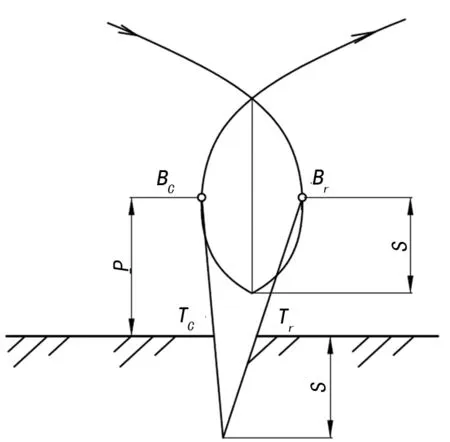
图6 轨迹穴形图
由于平行四连杆机构的连杆B、C、D在B点上会做相对的运动滑移,故成穴器穴形最大的宽度TrTC可以列入下列公式中:
(3)
式中:p为连杆长度=60 mm。
综上所述,采用平行四连杆机构控制的钉齿齿尖插入和拔出动作较好地模拟了实际垂直插入、垂直拔出,从而从设计思路上保证能够挑膜,达到了较好的捡拾率。
2.2 SolidWorks仿真分析
将建立好的样机实体模型在SolidWorksmotion中进行仿真分析。机具前进的速度Vm与反转机构转动的速度Vx存在以下关联公式。如图7所示。
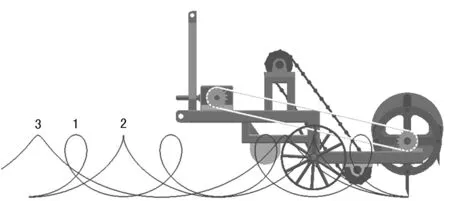
图7 轨迹穴形图
当λ=Vm/Vx<1时曲线为“3”号曲线,曲线无交叉,机具前进速度大于反转挑膜机构转速,会出现“漏捡”情况。
当λ=Vm/Vx=1时曲线为“2”号曲线,机具前进速度等于反转挑膜机构,处于临界状态;
当λ=Vm/Vx>1时曲线为“1”号曲线,有较大部分交叉,且闭环曲线宽度也较大,机具前进速度小于反转挑膜机构,能够更多地挑起埋藏土壤的地膜,增强捡拾效果。
基于以上分析得出:“1”号曲线为接近理想的捡拾曲线。
3 卷膜脱模机构
卷膜脱模是残膜捡拾机具的又一难点,基于传统卷膜脱模机构存在脱模困难的问题,设计了加装了伸缩管的卷膜脱模机构,如图8所示,在脱模时拉动伸缩管,致使前端收缩形成“前小后大”的锥形,达到轻松脱模的作用。如图9所示为现场脱模过程演示。

图8 卷膜脱模机构

图9 脱模过程
4 试 验
4.1 试验条件
高效残膜捡拾回收机试验地选在甘肃省定西市临洮县五里铺11号试验场内。实验环境温度23°,天气晴朗,田间条件如表2所列。

表2 试验地条件
4.2 试验结果
根据国家标准《GB/T 25413-2010农田地膜残留量限值及测定》,并结合实际情况确定试验指标[17-18],主要测试残膜回收净率等指标。试验结果如表3所示。图10为作业过程,图11为成果鉴定证书。

表3 试验地条件

图10 作业过程 图11 推广鉴定证书
5 结 论
文中重点对高效残膜捡拾回收机的平行四连杆反转旋齿式挑膜机构进行了研究分析。经过对机具的试验,得出如下结论。
(1) 试验验证高效残膜捡拾回收机较好地满足了农技农艺设计要求,机具各项主要设计参数合理,平行四连杆反转式挑膜机构的挑膜效果非常显著。
(2) 机具在田间的适应性较强,能很好地将玉米茬地表层以及耕层土壤中的残膜一起收集起来,作业时无缠膜现象。且脱模轻松、便捷。
(3) 机具集成的多样化功能,能够一次性实现残膜的捡拾、输送、卷膜、脱模等作业过程,同时反转式挑膜机构还能够疏松土壤,一定程度上改善和优化了土壤结构。
(4) 机具满足国家标准《GB/T 25413-2010农田地膜残留量限值及测定》的各项要求,生产率达82 kg/h,一次性捡拾率达到90%以上。
猜你喜欢
汽车实用技术(2021年23期)2022-01-05
模具制造(2021年8期)2021-10-20
中南大学学报(自然科学版)(2021年4期)2021-05-17
防爆电机(2021年1期)2021-03-29
今日农业(2020年16期)2020-12-14
环球时报(2020-03-30)2020-03-30
模具制造(2019年4期)2019-06-24
中西医结合心血管病电子杂志(2016年27期)2017-06-20
销售与市场·管理版(2014年8期)2014-09-15
汽车零部件(2014年2期)2014-03-11