脑卒中患者手部康复机器人的设计及其运动轨迹分析
2022-07-27 09:13刘世贤杨福芹
青岛科技大学学报(自然科学版) 2022年4期
刘世贤,王 春,杨福芹
(青岛科技大学 机电工程学院,山东 青岛266061)
脑卒中患者的手部康复相对其他部位更困难, 康复机器人是一种有效的康复方式[1-5]。过去有研究[6]设计了2自由度手部康复外骨骼,分别控制拇指和其他四指,利用机械结构限位保护关节。CONTI等[7-8]通过3D 打印制造出一款外骨骼康复机械手,每个手指由1个自由度控制,绳索驱动。除了利用刚性杆件完成机械结构,软体机器人也可被用作手部康复[9-10]。KANG 等[11]开发出一种柔软材质的康复机械手,可完成对拇指、食指和中指的训练。RANDAZZ等[12]开发出一款可同时训练五个手指的康复器械,驱动部分为鲍登线,动力和控制部分集中在一个控制箱中。
目前手部康复机器人研究集中在结构创新领域,关节运动模式为等速运动,缺乏正常人手指运动状态的模仿。促进脑卒中患者偏瘫侧手指恢复正常人运动模式是康复重要目的,因此本工作设计一款新型手部康复机器人,基于该结构,提出一种新的轨迹设计方法,使手部康复机器人带动患肢实现对正常人手部运动模仿。
1 手部康复机器人结构设计
本工作设计的手部康复机器人包括执行机构、机架、鲍登线和控制箱(图1)。手部康复机器人对食指、中指、无名指和小指进行康复,4根手指由执行机构牵引,锻炼掌指关节(metacarpophalangeal point,MCP)和近侧指间关节(proximal interphalangeal point,PIP)。鲍登线通过鲍登线接口连接执行机构,控制箱内有步进电机和控制单元,为鲍登线提供动力和控制信号。
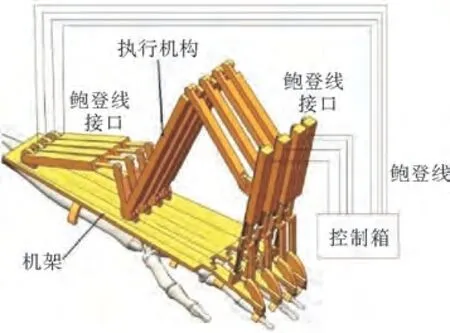
图1 手部康复机器人机械部分组成Fig.1 Mechanical components of hand rehabilitation robot
1.1 执行机构的结构及工作原理
执行机构的结构如图2所示,鲍登线1通过鲍登线接口1牵引滑块直线运动,通过连杆EF带动位于弧形导轨中的FH弧形滑块绕G点完成圆形轨迹运动,从而完成手指PIP伸展,鲍登线2通过鲍登线接口2 牵引JK杆,JK杆通过BAJ杆带动CB杆,CB杆牵引CGD杆运动,从而实现手指MCP伸展。关节G和D处安装了扭簧,扭簧产生被动力矩完成手指PIP和MCP关节的弯曲。执行机构有6个活动件(不包含机架),8个低副(7个转动副,一个移动副),2个主动件,自由度计算公式为
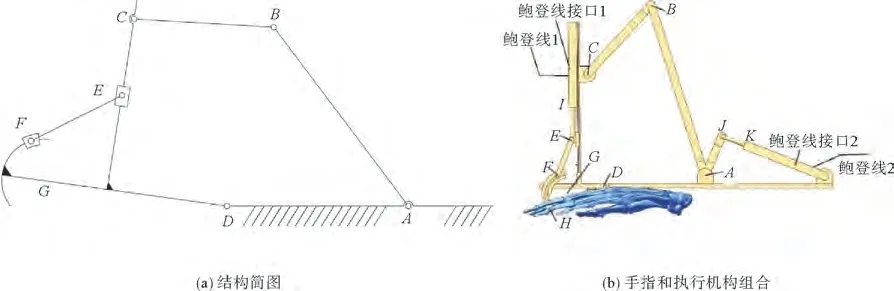
图2 手部康复机器人执行机构的结构Fig.2 Structure of hand rehabilitation robot actuator

根据式(1),机构自由度为2,满足设计要求。同时,机构自由度等于主动件的个数,机构具有确定的运动。本工作设计的执行机构由于采取鲍登线驱动,动力和控制器件外置于控制箱,所以可以产生更大的速度、加速度以及牵引(阻抗)力矩。在脑卒中患者具有一定自主活动的时期,该结构可以满足患肢运动速度更快,自主产生的肌肉力更大的情况。
1.2 执行机构的运动尺寸
根据文献[13](见表1和表2),设计执行机构的关节D伸展范围为0~45°,弯曲范围为0~90°,关节G伸展范围为0°,弯曲范围为0~90°。执行机构的HG和GD两部分长度取一般成人指骨长度的最大值,带动食指的执行机构HG+GD=105 mm,为了防止GD部分被人手指骨干涉,GD部分相比HG部分长度更长,因此取HG=37 mm,GD=68 mm。
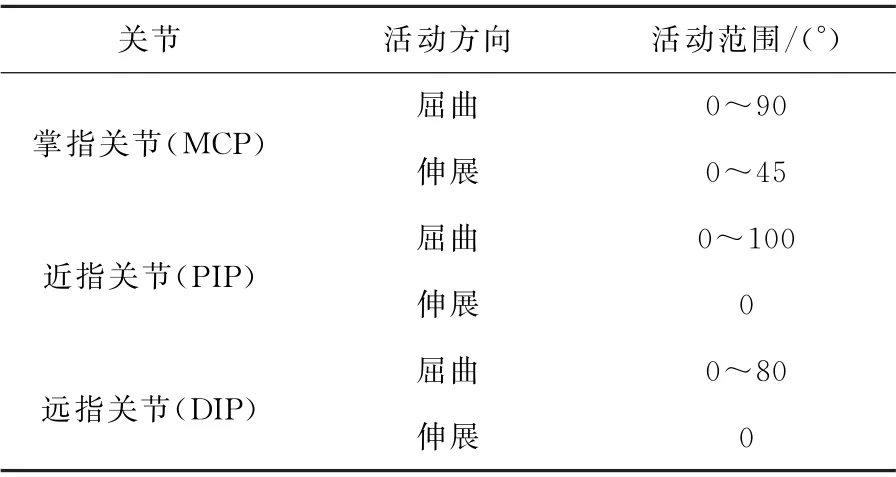
表1 食指、中指、无名指和小指的活动角度范围[13]Table 1 Range of active angles of index,middle,ring and small fingers[13]

表2 一般成人手指指骨长度及相应指间关节直径[13]Table 2 Phalanx length and corresponding interphalangeal joint diameter in general adults[13] /mm
2 手部康复机器人运动轨迹设计
2.1 数据采集
实验设备为Motion Analysis动作捕捉系统(图3),该设备使用高亮反光球(mark点)粘贴在人体各主要关节部位,通过发出LED 照射光经高亮反光球反射到高速镜头上,进行高亮反光球的检测和空间定位。Motion Analysis的系统精度可达0.1 mm,可以满足本次数据采集的要求。实验招募1名男性受试者,年龄23岁,手部没有外伤,可以灵活抓握和伸展。实验采集右手食指位移数据,共放置3个高亮反光球,在食指指尖位置粘贴1个高亮反光球,在掌骨靠近MCP关节处和掌骨靠近腕关节处各放置1个高亮反光球。要求受试者手掌保持与地面平行,掌心向下,记录受试者食指进行弯曲和伸展动作,连续进行若干次。实验要求受试者食指需要运动到在人体最舒适状态下所能伸展到的最大范围,该运动边界对该受试者来说相对固定,有较高重复性。数据的后续处理包括调整反光标记球的标签和补充轨迹线,轨迹线锯齿比较明显的需要平滑处理。

图3 动作捕捉系统实验记录Fig.3 Experimental records of motion Capture System
2.2 跟随模式轨迹设计
标定mark3初始位置为原点,计算mark3相对mark2的位移,经MATLAB 处理后数据如图4所示。
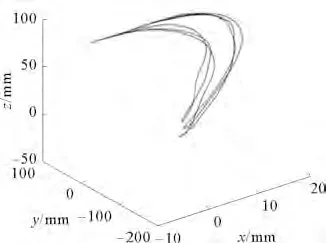
图4 食指末端轨迹的空间离散点Fig.4 Spatial discrete points of the end track of the index finger
利用随机抽样一致性算法(random sample consensus,RANSAC)对数据降维。RANSAC算法通过大数定理对样本随机抽样,假设所选样本数据正确,用正确数据建立模型,计算剩余点相对模型的误差,对结果评分,经过多次迭代,满足误差阈值点最多的平面即为最优拟合平面。RANSAC 算法流程见图5,迭代次数设置为1 000次,误差阈值根据结果调整,设置为16。最佳拟合平面的一般形式为

图5 RANSAC算法流程图Fig.5 Flow chart of RANSAC algorithm
将数据集绕z轴正向逆时针转动θ角度,再绕x轴正向逆时针转动φ角度,使最佳拟合平面与xoy平面重合。实验记录的初始方向与标准x轴方向有偏转角,记为γ,让数据集绕y轴正向逆时针转动γ角度。图6为处理后的标准位移数据,也是跟随模式的运动轨迹。通过逆向运动学仿真,可以取得电机的输出位移变化曲线,使用该曲线完成对正常人的指尖相对掌骨运动的模仿。
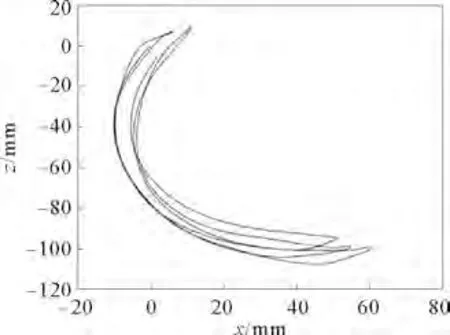
图6 标准位移数据Fig.6 Standard displacement data
2.3 牵引模式轨迹设计
跟随模式运动轨迹完成对正常人运动方式的模仿,牵引模式运动轨迹则按照固定速度运行,帮助手指进行连续被动运动。图6 数据使用椭圆方程拟合,椭圆的一般形式为
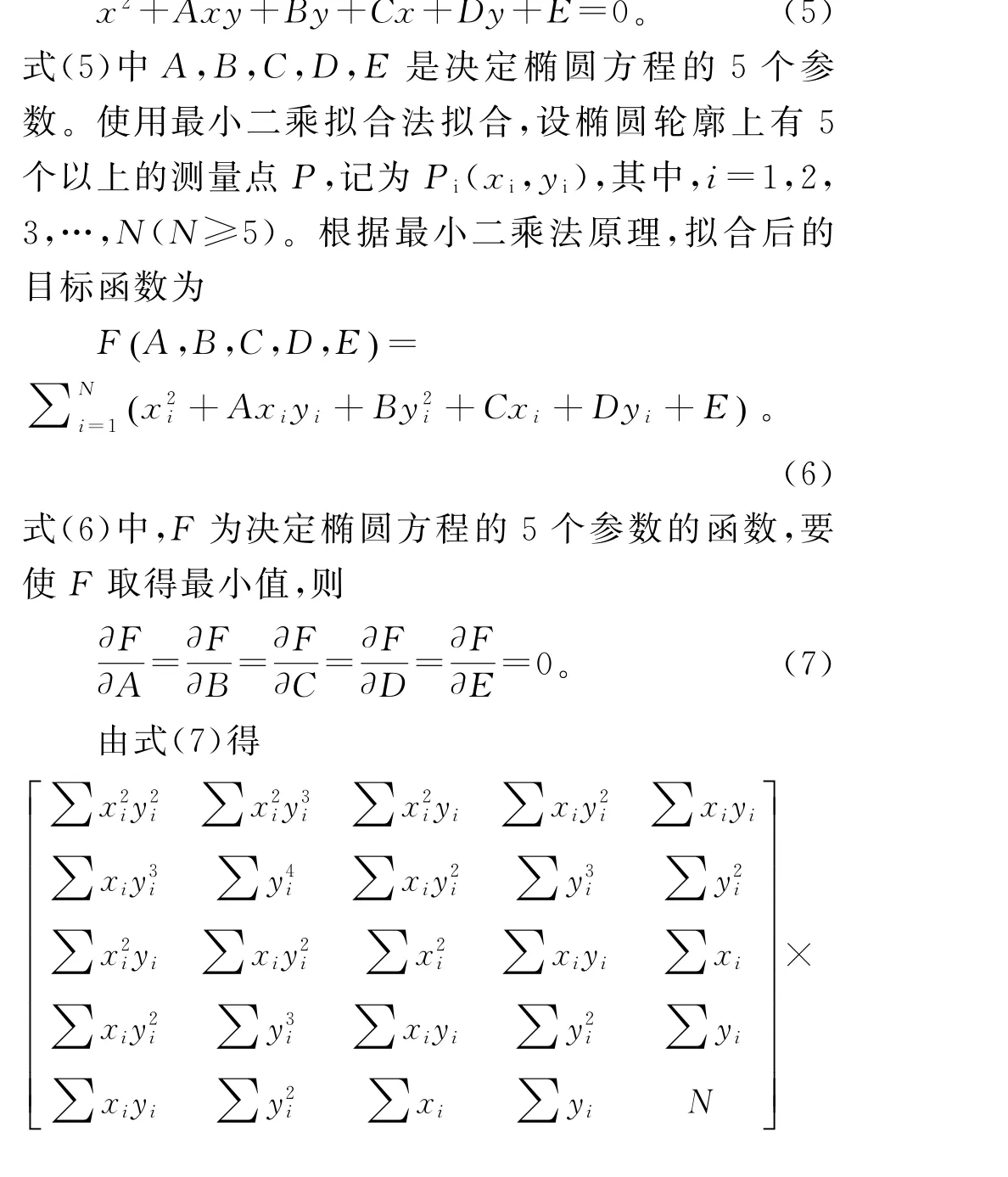
式(9)即为椭圆的一般形式。图7表示实际曲线和拟合曲线,为便于评估拟合优度,将拟合曲线进行分割,分割点根据观察选择。经计算,拟合模型分割点上半段的均方误差(MSE)=43.775 6,相关系数(R2)=0.999 4,下半段的MSE=8.058 4,R2=0.997 5,拟合程度较好。
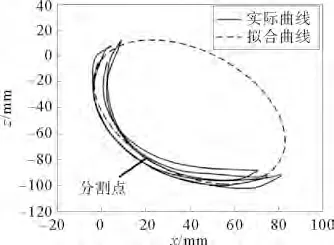
图7 标准实验数据与拟合数据Fig.7 Standard experimental data and fitted data
拟合曲线为连续函数,在实际使用时需离散化。通过固定步长的抽样获取采样点,设运动速度为v,假设v=100 mm·s-1,第1个采样点设为第0 s,抽样间隔设为1 mm,第i个抽样点对应的时刻ti和v之间的关系为

式(10)中,i为整数,且1<i≤N,N为抽样点总数。第i个抽样点的x轴坐标为xi,y轴坐标为yi。
3 手部康复机器人的仿真分析
3.1 逆运动学仿真
以式(10)计算结果作为驱动使用Recur Dyn软件对牵引模式下弯曲阶段进行仿真,驱动形式为点驱动,驱动点为H点,仿真前进行简化(图8)。逆运动学仿真得到EI和JK的相对位移变化(图9),EI和JK的相对位移就是鲍登线1和2的相对位移,它们也代表外置控制箱中对应的电机1和2的输出位移变化曲线,可以看出,电机1和2输出位移平稳。图9中鲍登线张紧的方向为EI和JK相对位移变化的正方向。
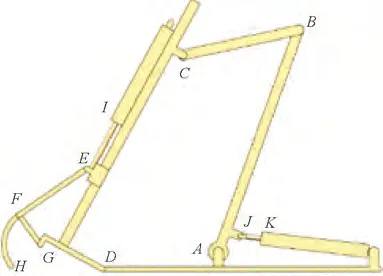
图8 手部康复机器人简化模型Fig.8 Simplified model of hard rehabilitation robot
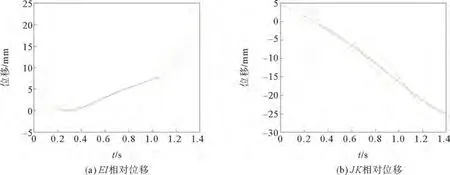
图9 相对位移变化Fig.9 Relative displacement change
3.2 正运动学仿真
利用EI和JK的相对位移变化驱动模型完成正向运动学仿真,得到关节G和关节D的角位移变化曲线如图10所示,关节G和关节D的角位移正方向均为手指弯曲的方向。
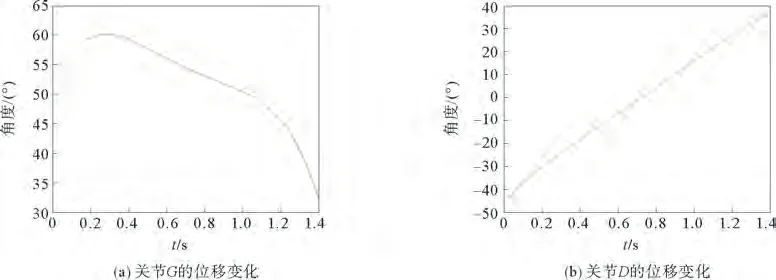
图10 关节的位移变化Fig.10 Displacement of the joint
由图10可以看出,关节G的角位移范围为(30~60)°,对应人的PIP 关节,关节D的角位移范围为(-45~35)°,对应人的MCP 关节。执行机构的关节安装时和手指有一定夹角,关节G呈弯曲状态安装,弯曲角度为60°,关节D呈伸展状态安装,伸展角度为25.5°。根据对图10的观察,手部康复机器人的关节变化范围位于执行机构的理论运动范围之内,运动轨迹符合机器人结构的设计要求。关节G和关节D的角度变化平缓,说明运动轨迹设计合理。
4 数学模型验证
4.1 人手指空间坐标系
运用数学模型描述手指指尖和机器人执行机构末端的运动边界,将机器人执行机构末端运动边界的理论计算结果与上文仿真分析结果相对比。首先运用D-H 法建立人手指的理论空间运动范围描述,如图11所示。根据D-H 法,DIP 和PIP 分别由1个自由度代替,MCP由2个自由度代替。连杆0长度为0 mm,连接MCP的2个关节,连杆1~3分别代表近节指骨(PP)、中节指骨(MP)和远节指骨(DP)。设基础坐标系x-1-y-1-z-1固定在手掌,定义连杆0与手掌间关节在x-1-y-1-z-1端为关节-1,在x0-y0-z0端为关节0,关节1连接连杆1与连杆0,关节2连接连杆2与连杆1,关节3连接连杆3与连杆2。x0-y0-z0固定于连杆0,相对x-1-y-1-z-1转动,设x0-y0-z0原点O0与x-1-y-1-z-1原点O-1重合,y0轴与y-1轴重合,z0轴与z-1轴重合且相对z-1轴转动,转角为θ0,x0轴方向重合于连杆0 轴向,按照右手坐标系建立。x1-y1-z1固定于连杆1,相对x0-y0-z0转动,转角为θ1。原点O1重合于关节1轴线,x1轴沿连杆1轴向朝内,z1轴方向沿关节1轴向朝掌外侧,y1轴方向符合右手坐标系。坐标系x2-y2-z2和x3-y3-z3建立方式与x1-y1-z1类似。连杆运动学参数见表3。
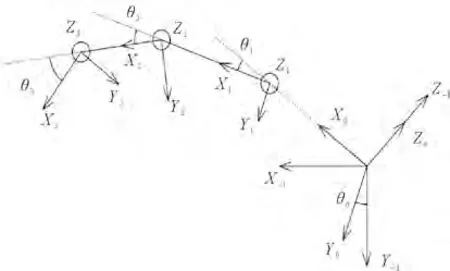
图11 手指的空间坐标系描述Fig.11 Spatial coordinate system description of finger
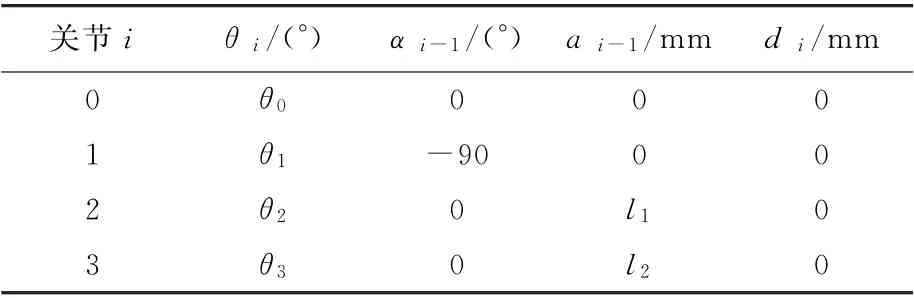
表3 手指空间坐标系连杆运动学参数Table 3 Kinematic parameters of connecting rod in finger spatial coordinate system
4.2 机器人执行机构末端空间坐标系
机器人执行机构末端运动边界的描述如图12所示,设基础坐标系A-1-B-1-C-1固定在DA杆上,定义连杆GD杆与DA杆间关节为关节0,定义连杆HG与连杆GD间关节为关节1。定义连杆GD的长度为l’0,连杆HG的长度为l’1。坐标系A0-B0-C0固定在GD杆上,坐标系A1-B1-C1固定在HG杆上,两坐标系的建立方式和人手指坐标系x1-y1-z1类似。执行机构末端的运动学参数描述见表4。
4.3 人手指运动边界的数学模型
通过正向运动学求解,获得指尖末端在基础坐标系下的坐标表达:
式(11)中:l1、l2和l3来自实验受试者,θ1、θ2和θ3在表1中给出。将上述参数带入式(11)进行抽样计算,抽样点为1 030 302个,结果如图13所示。文献[14]也采用该方法计算了指尖相对掌骨的运动边界,与本文结果类似但有变化,原因是受试者存在个体间差异。图13和图7对比可以发现受试者实验记录数据在该受试者理论计算运动范围之内,出现这一状况的原因是理论计算时的关节转角参照人体能够运动到的极限位置,但是在实验数据采集过程中,食指处于放松状态。
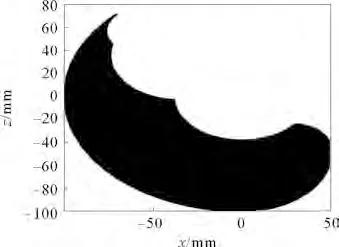
图13 受试者指尖相对掌骨运动的运动边界Fig.13 Motion boundary of fingertip of the subject relative to metacarpal bone
4.4 机器人执行机构末端运动边界的数学模型机器人执行机构末端运动边界的数学模型为
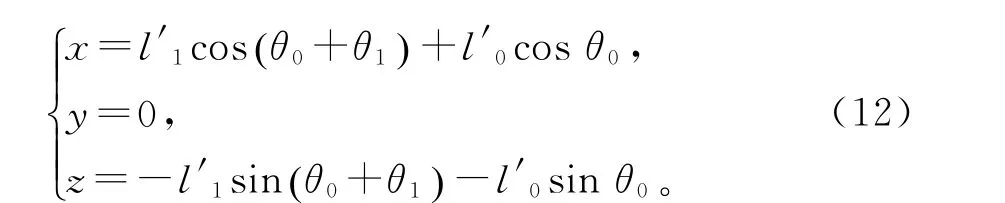
式(12)中:l’0=68 mm,l’1=37 mm,θ0的取值范围为-45~90°,θ1的取值范围为0~90°,同样进行抽样计算,绘制边界范围为图14。由图14 和图7比较可以看出,由拟合算法得到的运动轨迹在理论计算的机器人执行机构末端运动边界范围内,拟合算法得到的运动轨迹具有现实意义。
图14 机器人执行机构末端运动边界Fig.14 End motion boundary of robot actuator
5 结 语
本工作设计手部康复机器人机械结构,通过运动捕捉技术设计运动轨迹。其次进行运动学模拟验证运动轨迹和机械结构是否匹配,数学模型计算验证运动轨迹设计是否合理。研究结果表明:基于运动捕捉系统的运动轨迹设计方法具有可行性,可以实现脑卒中患者偏瘫侧手指对正常人运动特点的模仿。在未来的工作中可以进行动力学模拟分析性能,并尝试制造实物进行实验。
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
中国高新技术企业(2015年17期)2015-05-18