
自走式高地隙菠萝催花机设计与控制*
2022-07-28 07:18张日红区建爽何凯均王志伟卢德贤
机电工程技术 2022年6期
张日红,张 权,区建爽,何凯均,王志伟,卢德贤
(仲恺农业工程学院机电工程学院,广州 510225)
0 引言
菠萝是深受消费者喜爱的热带水果之一,在世界上80 多个国家及地区广泛种植。我国的菠萝种植面积及产量均占世界总量的7%左右,是菠萝十大主产国之一[1]。菠萝是特色高效的热带经济作物,也是热区农民重要的经济来源。随着经济的快速发展和人民生活水平显著提高,菠萝消费的比重逐年增加[2]。2014—2018 年,国内菠萝消费量由134万t增长到166万t,年均增长4.7%。
自然状态下的菠萝抽蕾时间不集中致果实成熟不集中、管理难度大,而合理有效的催花可以调节菠萝的产期和上市时间,延长果实供应期,提高菠萝的品质和产量[3-4]。但目前传统催花方式存在作业劳动度大、催花效果差等缺点。为了减轻工人喷洒过程的工作量,降低劳动成本,同时减少人工喷洒过程出现的失误,2018 年云南大学公开了一种辅助人工的菠萝催花装置,通过分别操作储液桶导流阀门开关推动杆按钮和定量筒出口阀门盖推动杆按钮,完成将催花液缓缓注入菠萝植株株心,可以方便、精确地完成菠萝的催花过程[5]。2020 年广西壮族自治区亚热带作物研究所提出了一种适合菠萝催花的无人机均匀喷洒装置,增加催花枪的往复摆动和回转运动2 个自由度,扩大了喷洒装置的喷洒范围,使喷洒过程更加均匀[6]。
本文以地势平缓或环山等高、有良好的排水灌溉系统等种植环境的菠萝种植园作为催花作业环境,采用高地隙行走方案,保证了菠萝催花作业装备在菠萝植株上良好的通过性,作业过程中不会对菠萝植株造成伤害,在大部分作物的病虫害防治方面具有很高的实用价值[7-8],催花作业高度、作业行距和株距均可根据种植方式进行调整,自走式自动化催花作业的控制系统引入了PLC 逻辑控制器,保证了控制过程的实时性和稳定性。
1 功能方案
基于PLC 控制的自走式高地隙菠萝催花机,包括机架、动力系统、传动系统、喷洒系统、PLC 控制系统,转向系统等。车架一端安装有喷洒系统,动力系统与传动系统传动连接,传动系统安装在车架的底面;PLC 控制系统固定安装在车架,分别与动力系统、传动系统、转向系统和喷洒系统电性连接。喷洒系统在推杆电机的驱动下上下升降,调节喷头与喷洒位置的距离,喷头在水平方向也可进行调节,以适应菠萝种植行距的变化。PLC设置好车体前进方向和速度、催花液喷洒间隔时间、每次喷洒的时间、喷头竖直方向的高度以及车体行走最大距离。系统启动后,随着车体的匀速前进,催花液喷洒系统按照预设好的间隔时间向菠萝株苗喷洒催花液;直流永磁无刷电机通过前桥总成驱动前高地轮;液压转向系统驱动两个前轮支腿旋转实现转向。此机器具有机械化程度高、操作方便、喷洒效率高等优点。
1.1 行走与转向单元
如图1 所示,车体的转向和驱动均来源于前轮,直流永磁无刷电机通过前桥总成驱动前高地轮正转或反转,进而实现车体的前进或后退;两个前轮的动力支腿分别与液压转向油缸的两侧相连,在液压转向油缸的驱动下可实现前轮的转向控制[9]。
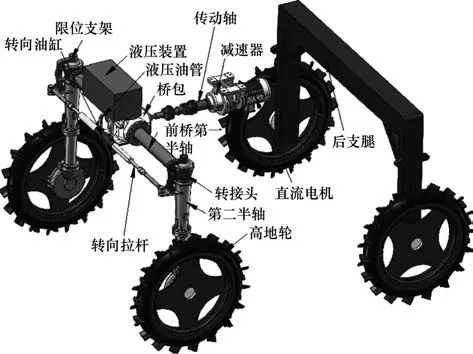
图1 行走与转向原理Fig.1 Schematic diagram of walking and steering
传动系统包括传动轴、前桥、高地轮和后支腿;传动轴一端与动力系统传动连接,另一端与前桥传动连接,前桥与高地轮传动连接,高地轮为主动轮,后支腿通过垫板与机架固定连接,后支腿两端分别与高地轮固定连接,对应高地轮为从动轮。
动力系统输出的动力经过摆线针轮减速器增大扭矩后通过传动轴传递给前桥,前桥经过锥型齿轮将动力给两端的第一半轴,第一半轴通过齿轮传递给第二半轴,最后将动力传递给主动高地轮,主动高地轮通过车架将动力传递给从动高地轮,从而使车体行走。
转向系统包括液压装置、转向油缸、转向拉杆、限位支架、液压进油管、液压回油管。液压装置固定在机架上,液压进油管、液压回油管的一端分别与液压装置连通,另一端与转向油缸连通,转向油缸的两端面各与一转向拉杆一端连接,转向拉杆另一端铰接在第二半轴上,第二半轴为回转体,液压缸内通过进油回油控制转向拉杆伸长缩短,从而使第二半轴回转体旋转,带动高地轮转向[10],限位支架一端固定在第二半轴上,另一端固定铰接在转接头上;限位支架限制转向角度,液压转向装置受PLC控制系统控制。
1.2 喷药单元
喷药单元原理如图2 所示。喷洒单元包括溶液箱、过滤器、双核隔膜泵、阀组、连接管道、升降部件和喷头等。水平滑轨上安装有4 个喷头,可在水平方向上自由调整,以便适应菠萝左右种植行距的规格,水平滑轨固接于竖直滑动板的底端,以便满足菠萝株苗的不同横距种植。电磁阀的启停由PLC控制。
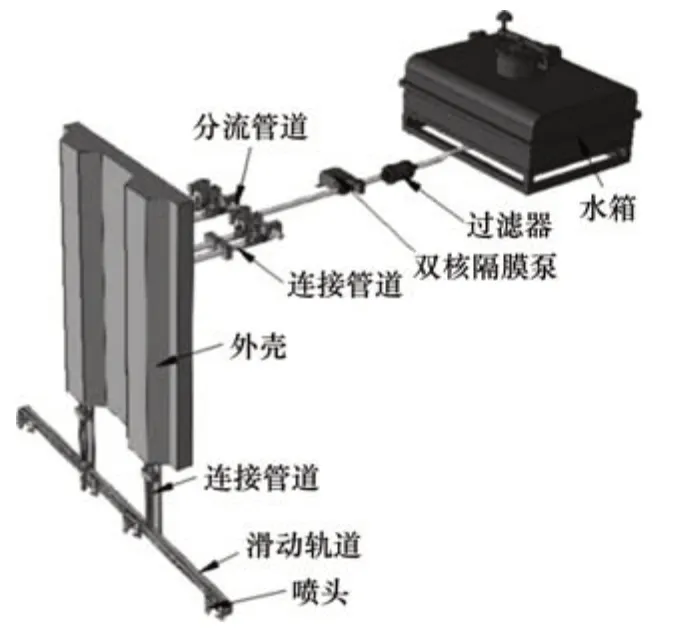
图2 喷药单元原理Fig.2 Schematic diagram of spraying unit
水箱固定安装于机架上,水箱通过连接管道与喷头连通。喷洒系统包括有过滤器和双核隔膜泵、分流管道和电磁阀;水箱出水管与过滤器的一端连通,另一端与双核隔膜泵的输入端连通,输出端连通分流管道,分流管道上开设有若干个连通孔,且每一连通孔均与一连接管道连通,电磁阀安装在连接管道前端。
存放在水箱里的催花药剂水溶液通过过滤器滤除杂质,然后通过双核隔膜泵加压后经管道流向电磁阀控制的分流管道,PLC 控制箱控制电磁阀阀门的开启,实现喷药动作控制。
1.3 升降单元
如图3 所示,升降单元包括框架板、外壳、推杆电机和滑动板,框架板竖直安装在机架的一端,推杆电机通过一对螺母与丝杠,将旋转运动转化成直线运动,利用电动机正反转完成推杆动作,丝杠端部固定在滑动板上,滑动板通过滚珠轴承滑动连接在滑动轨道柱上,丝杠上下运动带动滑动板沿轨道柱上下运动。
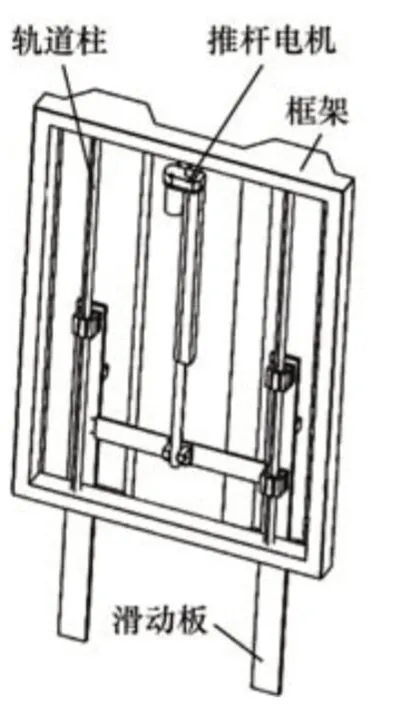
图3 升降单元原理Fig.3 Schematic diagram of lifting unit
2 电气控制系统
电气控制系统原理如图4所示。控制器、行走电机、液压电机、垂直电机和喷药泵电机的供电电源来自于DC48V 蓄电池。Y0、Y1 分别是行走电机的正、反转信号,最终实现车体的前进与后退; Y6、Y7 为液压转向电机的左、右转信号; Y10、Y11、Y12、Y13 分别控制4 个喷药电磁阀。行走电机的前进、后退速度由调速电位器控制。位置编码器用来反馈行走电机的转动方向、转动角位移和转动速度,间接获得车体行进位移、行进方向和行走速度。

图4 电气控制系统原理Fig.4 Schematic diagram of electrical control system
3 PLC程序设计
3.1 PLC的I/O分配表
表1 所示为高地隙菠萝催化机PLC 控制系统的I/O 分配表。输入信号主要涵盖安装在行走电机一端的编码器信号、启停信号、推杆电机上升和下降限位信号等。输出信号主要涵盖行走电机正、反转,液压转向电机控制、推杆电机垂直升降和4个喷药电磁阀启停控制等。

表1 PLC输入和输出地址配置表Tab.1 Input and output address of PLC configuration
3.2 控制程序设计
控制系统选用了信捷XD2-32 型PLC 作为控制核心,程序设计分为两部分,分别为自动模式和手动模式。自动工作模式中通过HD10 设定喷药时间,其数据储存在时间寄存器T0 中,在触控屏可输入喷药时间。HD20 为读取实时位置脉冲当量,通过C 语言编译可将脉冲当量转化为行走电机的间距,可直观地在触控屏上显示。寄存器D20 为喷药时的间距即两次喷药之间的距离,其数据可在触控屏上调整。寄存器HD2 为行走最大距离,可在触控屏中输入数值,若HD20 大于或等于HD2 系统急停。在输入喷药时间、喷药间距、行走最大距离,以及选定喷药电磁阀后即可启动自动模式,实现定时间间隔、定喷洒距离和定喷洒时长自动化喷洒作业。自动控制工作模式设计程序流程如图5所示。

图5 控制程序原理Fig.5 Schematic diagram of control program
3.3 惯性误差的补偿
由于本装置行走动力源采用的直流无刷电机无刹车功能,为延长电机的使用寿命没有采用反接制动方案。因此车体在电机停止输出动力后会受物理惯性影响继续前进一段距离,从而导致车体实际位置与理论位置存在误差。如不采取误差补偿,装置在持续工作时会使得绝对位置误差越来越大,进而影响作业的精度和效果[11-12]。为消除惯性误差,采用了惯性补偿算法,以达到精准作业的目的,该算法的核心思想是通过实时监控编码器实际位置差和车体催花行走间距预设值的差值来自动矫正车体行走位移。表2 所示为惯性误差补偿中所用到的设计变量,程序设计流程如图6所示。

表2 程序设计变量列表Tab.2 List of programming variables
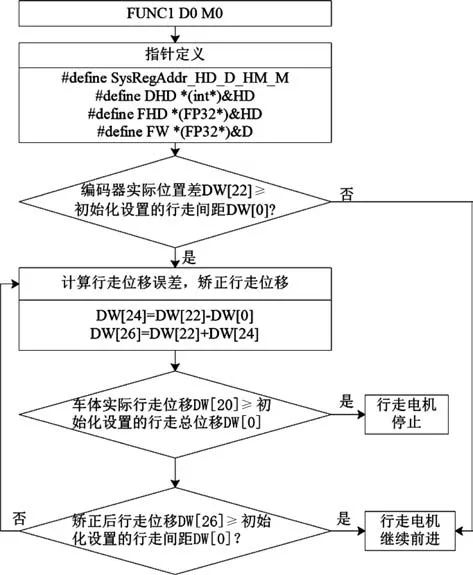
图6 惯性误差补偿原理Fig.6 Schematic diagram of inertial error compensation
4 结束语
菠萝抽蕾期的催花效果决定着菠萝果实的品质和产量,关乎菠萝种植户经济收入。针对现在菠萝催花主要以人工为主,但存在着人工喷洒劳动成本高、人工喷洒不精准、催花效果不理想等问题,本文以实现菠萝植株的准确催花作业为目标,设计了基于PLC 控制的自走式高地隙催花机。采用了高地隙行走与转向结构、喷射高度电动可调的总体结构,惯性补偿控制算法可有效消除行走车体行走过程中所产生的惯性误差。这种以PLC 控制为核心的高地隙自走式菠萝催花机是提高菠萝催花作业效率的有效途径之一。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
橡塑技术与装备(2022年6期)2022-06-02
现代装饰(2021年3期)2021-07-22
音乐天地(音乐创作版)(2021年5期)2021-07-16
——对2018年广州市一道中考题的研究
中学数学研究(广东)(2021年6期)2021-04-20
中国煤炭工业(2019年5期)2019-11-04
小猕猴智力画刊(2018年10期)2018-11-13
军民两用技术与产品(2017年13期)2017-12-18
专用汽车(2016年12期)2016-02-11
汽车实用技术(2015年8期)2015-12-26
