基于嵌入式传感装置的数控机床颤振实时补偿研究
2022-09-15 05:12蓝立俊刘朝涛
机床与液压 2022年13期
蓝立俊,刘朝涛
(重庆交通大学机电与车辆工程学院,重庆 400074)
0 前言
在机床加工时,颤振是仅次于热变形对加工精度影响最大的因素。颤振是在使用机床的过程中,材料和工具之间突然产生的相对振动。而这种振动是严重影响待加工材料质量的一个因素,也是导致工具和机器损坏的原因。
因此,有必要消除颤振,以确保可加工性和稳定性。目前颤振主要可以通过2种方法来降低:一个是宏观检查工具在工作时振动的程度,并建立一个数据库,以便颤振不会再次发生;另一种是用加速度传感器采集数据,用选择加工条件的方法来防止下次产生颤振。
本文作者使用CAN总线构建车间机床工作状态信息采集网络,然后用加速度传感器来采集机床各轴的数据信息,颤振检测和预测模型的部分将被嵌入并制成装置,再通过无线网络通信模块将数据上传至上位机,上位机软件采用C语言基于KEIL平台开发,实现对数控机床颤振误差实时补偿;最后,通过加速度传感器信息和颤振误差补偿模型来计算机床颤振补偿值,并且以加工工件表面粗糙度作为系统性能指标。
1 数控机床颤振信号采集及分析
颤振是机床在特定条件下产生的。为了阐明产生颤振的条件,文中以加速度信号作为研究对象,通过使用加速度传感器分别连接到、和轴来对机床信息进行采集。颤振测试及信号采集装置如图1所示。
加工过程通过改变进给速度、加工深度和主轴转速来测量每个轴的加速度信号。为了分析机床的颤振特性,把加工深度固定为0.8 mm,主轴转速固定为500 r/min,然后分别以500、1 000、2 000和3 000 mm/min的进给速度对机床信息进行测量,结果如图2所示。
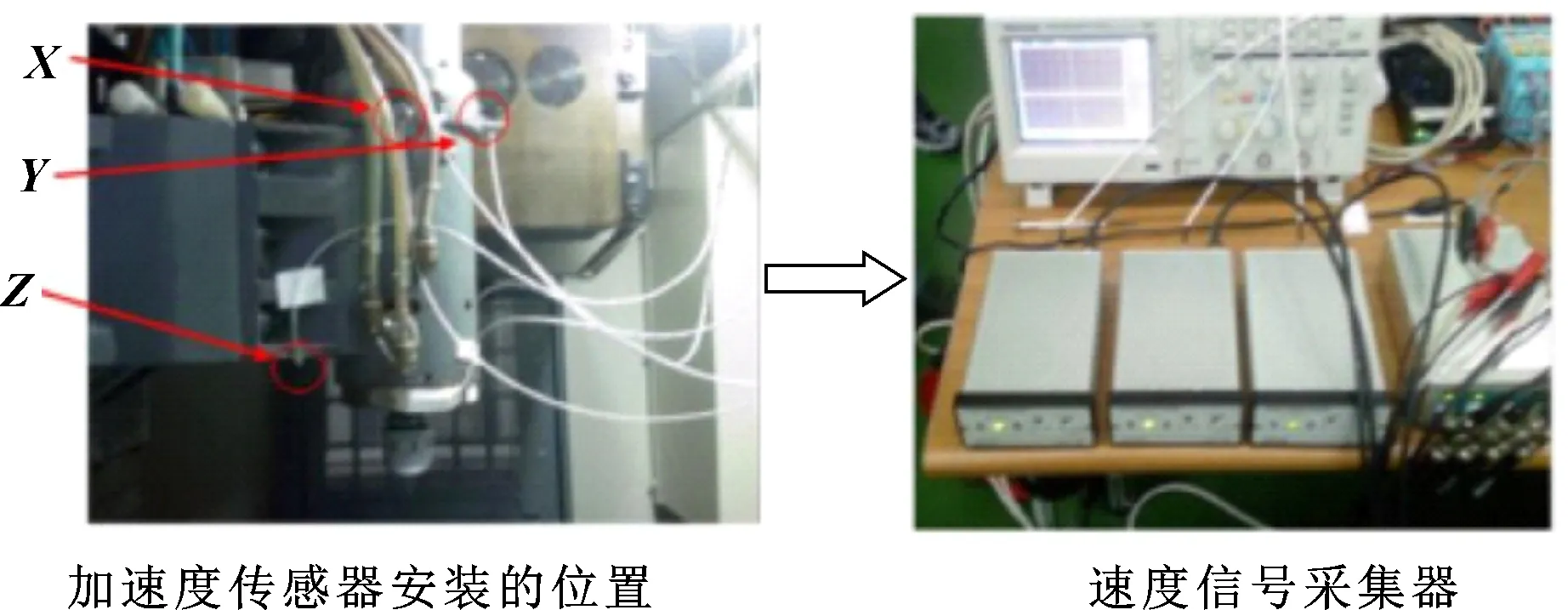
图1 机床颤振测试以及信号采集
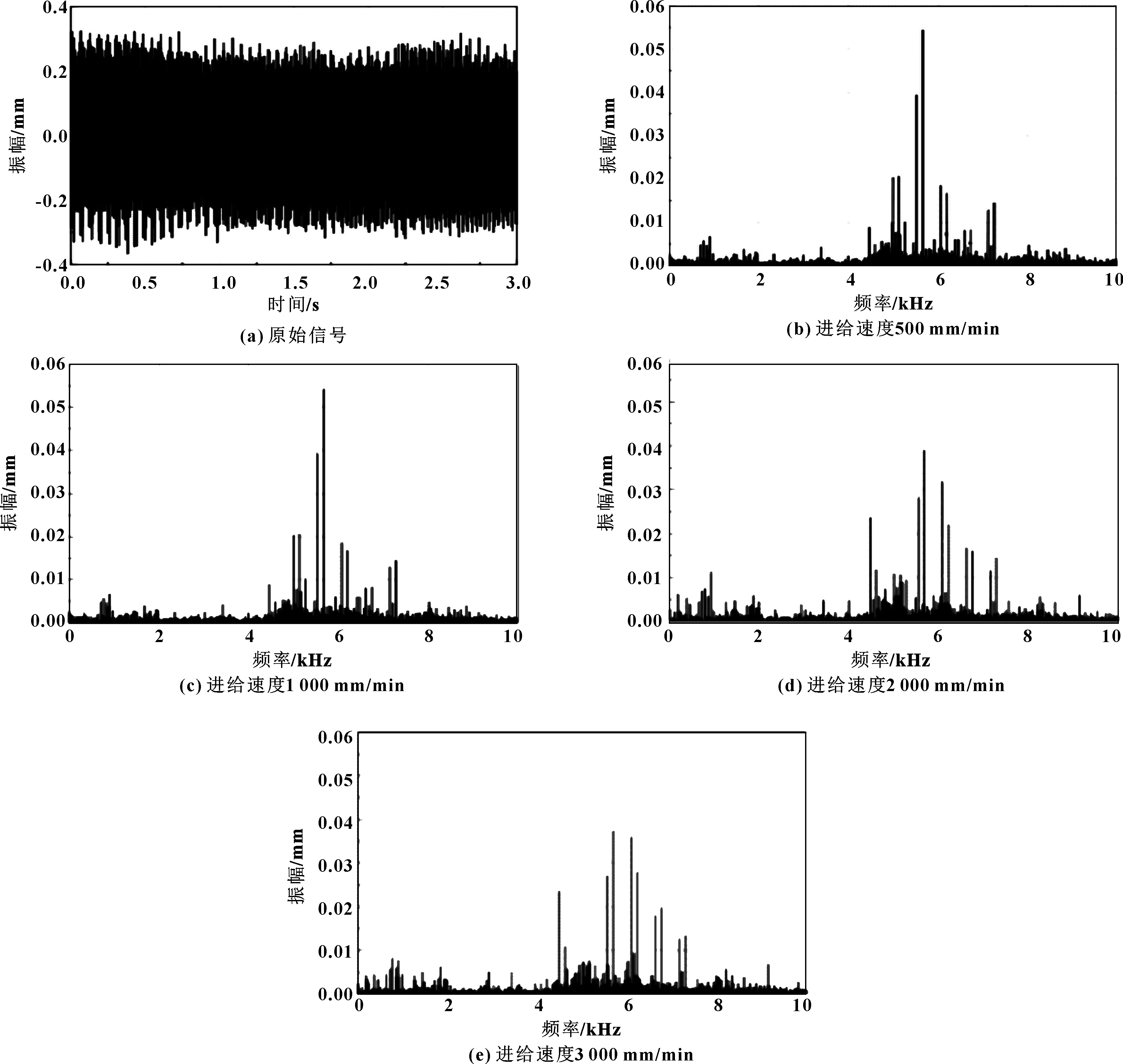
图2 原始信号和频率特性曲线
从图2可以看出:在加工深度为0.8 mm、主轴速度为500 r/min的情况下,随着进给速度的增加,发现理想频率大多集中在4 000~8 000 Hz之间,但振幅值逐渐减小。其中在3 000 mm/min的进给速度时,振幅值趋于稳定,此时机床达到最佳的运行状态。
2 系统总体方案的设计
2.1 嵌入式系统网络设计
嵌入式设备性能比较单一,若是模型参数改变就需要重新烧写程序,此操作比较麻烦。基于此,文中采用上位机作为颤振误差补偿建模服务器,可保证建模性能以及模型的扩展。与此同时,上位机服务器可以对整个车间机床进行管控,可以实现集中控制,颤振误差补偿系统示意如图3所示。
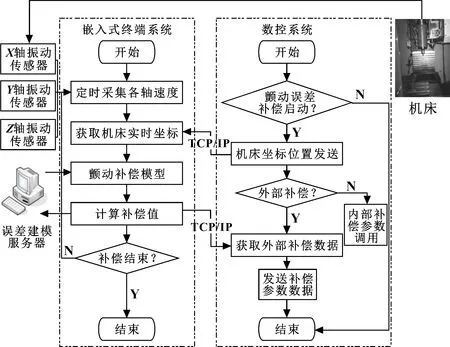
图3 系统网络示意
在图3中数控机床系统和嵌入式终端系统通过TCP/IP协议进行了有效的信息交互,同时嵌入式终端系统和误差建模服务器通过CAN通信协议也联系了起来。这样不仅扩展性强,还具有稳定性高等特点。颤振误差补偿系统功能划分如表1所示。
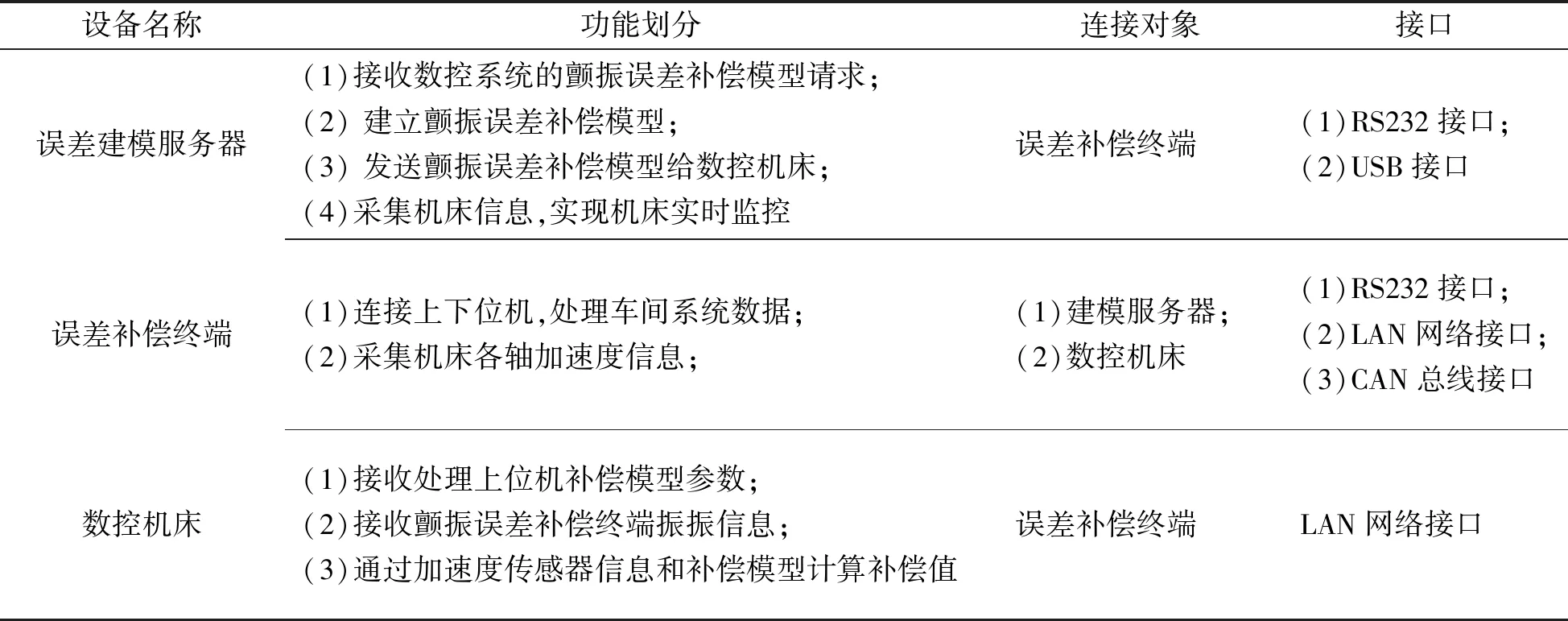
表1 颤振误差补偿系统功能划分
2.2 嵌入式传感器装置硬件设计
整个硬件系统的前端是由加速度传感器进行机床的数据采集,然后通过由9个引脚组成的连接插孔将电源连接到加速度传感器中给传感器供电,同时通过蓝牙模块和LAN网络模块把机床加工状态信息和加速度信号发送到CAN总线上。将数据打包通过无线网络通信模块或CAN总线模块上传至上位机,上位机服务器系统则通过数据筛选、分析和解包,显示相关信息。整体示意如图4所示,硬件实物如图5所示。
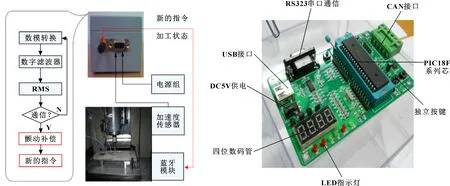
图4 系统总体设计结构 图5 系统硬件设计实物示意
2.3 嵌入式传感器装置软件设计
嵌入式终端芯片选用PIC18F系列芯片,这种类型的芯片都内置了CAN接口,并且该协议是为了噪声环境设计的,所以在机床中使用可以提供可靠的通信。由于内置了局域网控制器,则只需要一个局域网收发器(如PCA82C250)就可以连接到局域网CAN总线上。
嵌入式终端使用以太网与数控系统通信,需要遵从TCP/IP协议。LWIP作为一种开源代码,包含TCP/IP开源协议栈。通过在PIC单片机上移植LWIP构建客户端,实现数据采集系统与机床数控系统的通信。嵌入式终端监测机床信息流程如下:
(1)初始化嵌入式终端,开启TCP/IP协议,等待数控系统连接;
(2)数控系统和嵌入式系统连接,连接成功以后创建多个任务;
(3)连接成功以后,通过TCP/IP协议发送数控机床信息到嵌入式终端;若是连接断开,则信息中断,如此循环;
(4)机床等待接收嵌入式终端数据,并且处理接收到的数据,若没有嵌入式终端数据,则机床进入休眠状态,如此循环;
(5)嵌入式终端接收到数据后,采集机床各轴的加速度信息,传输至上位机判断是否出现颤振情况,依次循环。
2.4 CAN总线通信
控制器局域网CAN网络属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络,具有高传输速率可靠的传输性能、简单的接口方式、低廉的安装和维护成本等优势。其信号传输采用短帧结构,每一帧的有效字节数为8个,因而传输的时间短,受干扰的概率低,每帧信息均有CRC校验和其他检错措施,所以一般通信误码率极低。图6为CAN总线模块流程。
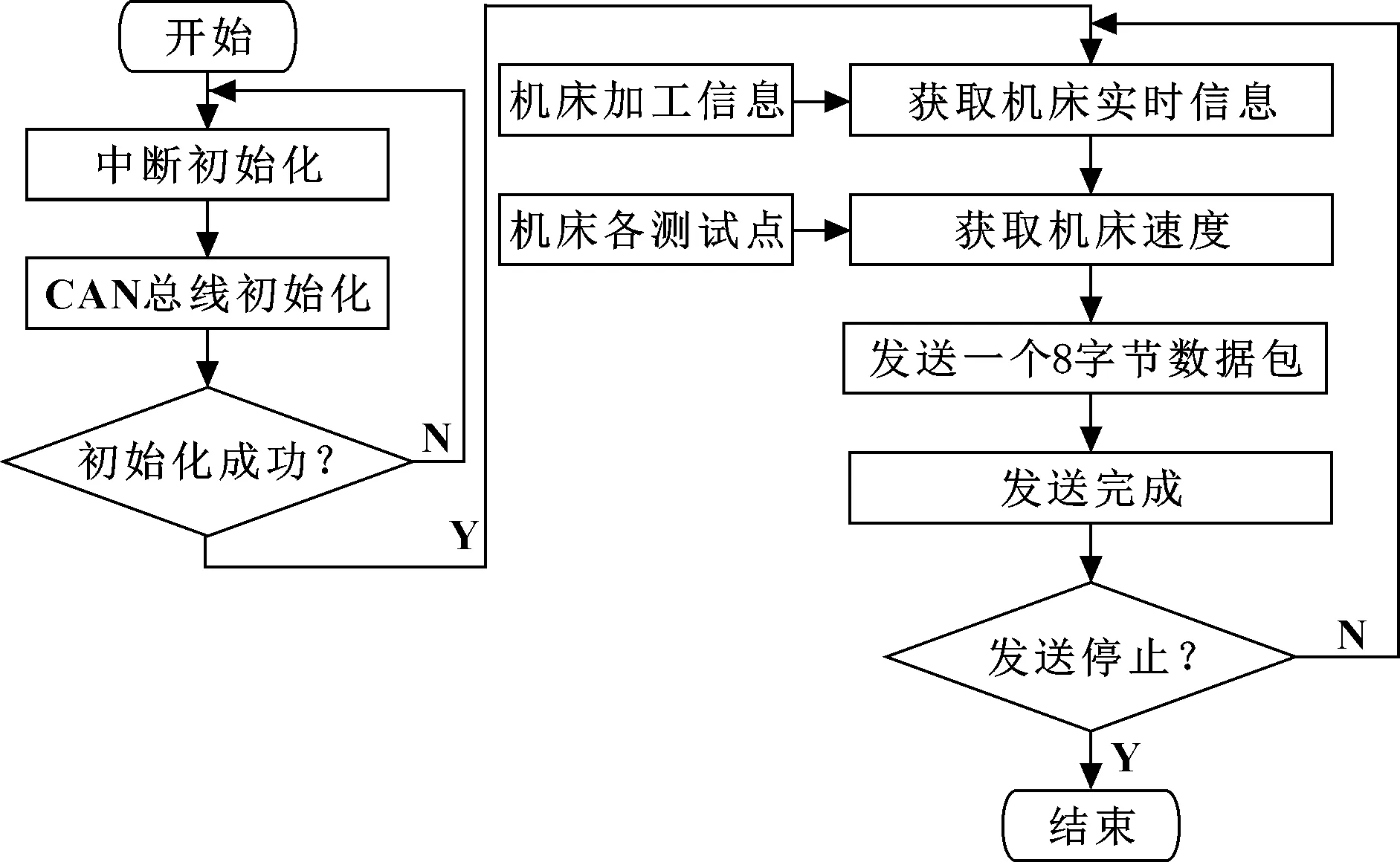
图6 CAN总线模块流程
3 颤动误差补偿系统测试与验证
3.1 测试环境的搭建
以图7所示数控机床为例,每一个数据采集终端都是以HN600A加速度传感器分别安装在机床、和轴上进行数据的采集;然后将终端采集的数据传送到CAN总线上,CAN总线上连接USB采集卡;最后把USB采集卡连接到计算机上就完成了硬件平台的搭建。

图7 硬件测试环境
3.2 颤动补偿验证
在上位机中实时提取机床工作所需要的测量数据相当困难,所以文中以工件加工表面粗糙度作为实验验证的指标。
采用日本三丰公式生产的粗糙度测量仪SJ-210进行了补偿前后的误差测量。经过多次的实验,工件表面粗糙度有了明显的改善,文中所研究的方法也得到了验证。机床颤动振动补偿前后的数据对比如表2所示。
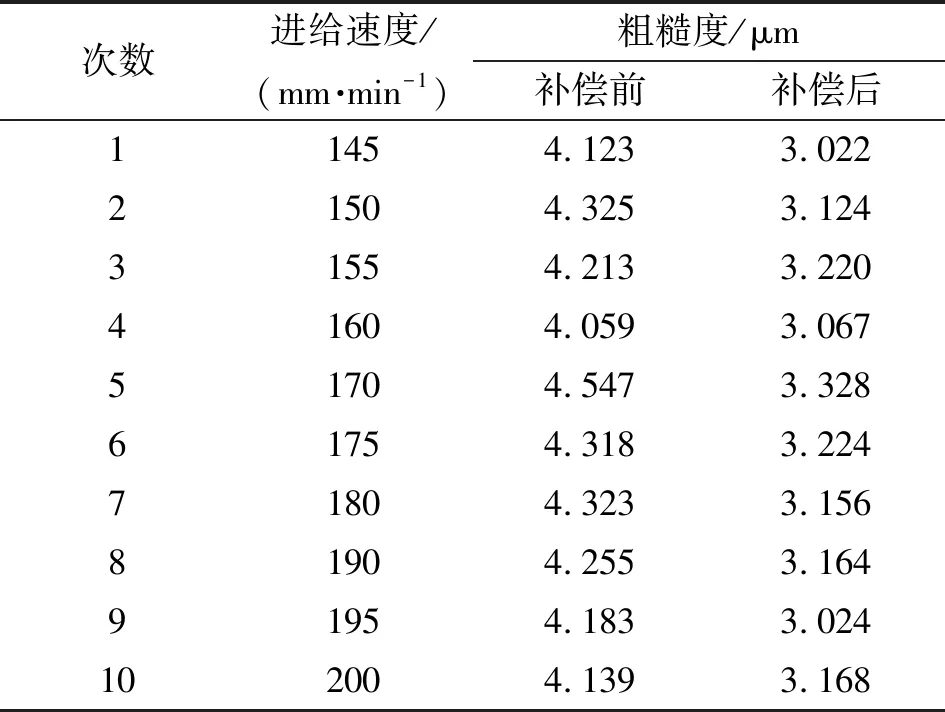
表2 颤动振动补偿前后对比
4 结束语
针对机床加工过程中出现的颤振误差补偿问题,提出采用嵌入式传感装置对其进行实时补偿。采用机床各轴加速度信息,通过颤振补偿模型计算补偿值,同时通过以太网与机床进行信息交互,并且使用CAN总线实现了和上位机服务器的通信,最后以工件加工表面粗糙度作为实验性能指标。实验结果表明:文中研究的方法能够有效采集机床状态信息,同时实现对机床颤振误差的实时补偿。
猜你喜欢
科学家(2021年24期)2021-04-25
中国质量与标准导报(2018年8期)2018-09-10
科学与财富(2018年11期)2018-06-11
智能制造(2015年5期)2015-05-29
中国信息化·学术版(2013年4期)2014-01-03
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05
现代电子技术(2009年6期)2009-05-31
计算机教育(2006年3期)2006-03-24
电子设计应用(2004年7期)2004-09-02