
一种用于悬挂升降自动平衡系统及其控制方法的开发与应用
2022-10-10 12:38岑秋仪
农业开发与装备 2022年8期
荆 毅,岑秋仪
(广东皓行科技有限公司,广东佛山 528300)
0 引言
随着智慧农业、无人驾驶农机技术在农业领域的使用和纵深发展,智能农机已成为实现无人驾驶技术发展的必要条件,只有农机实现了智能化控制,才能确保智慧农业以及无人驾驶技术的推广使用。农业场景主要涉及耕、种、管和收四个环节,拖拉机作为农业场景中应用最为广泛、用途最多的农机动力源,通过挂接不同的农机具实现农业场景中的耕整地、播种和运输环节。耕、种环节的作业质量直接影响到农作物后期的生长、生产和产量,主要是利用拖拉机通过后三点悬挂升降系统完成牵引作业,其作业质量与拖拉机悬挂升降平衡位置系统关系极为密切。
传统拖拉机的三点悬挂升降是通过升降油缸、上拉杆总成、左右两侧提升杆总成、左右两侧下拉杆总成的左右限位杆,完成农机具的挂接和升降作业。除悬挂升降由油缸实现外,其余都是依靠手工进行反复多次调节来完成农机具前后、左右的水平控制,调节后,在作业过程中由于地形和工况变化不能实时调整农机具的左右、前后水平,农机具无法实现仿形作业和平整作业的需求,因此不具备自动驾驶控制技术。
1 主要内容
针对传统拖拉机三点悬挂在实际作业过程中无法实时进行前后、左右自动调整平衡所挂接农机具的缺陷,根据拖拉机三点悬挂牵引挂接农机具实际作业的质量需求,通过改变原有悬挂结构设置,利用液压油缸替代原有机械拉杆,配以双轴角倾角传感器实时采集数据,控制器融合算法解析,把控制信号输入到电控液压阀组,从而控制油缸的伸缩来完成农机具的平衡和实际作业需求。
2 关键技术
1)悬挂升降依靠安装在提升臂的角度传感器进行监测,并将实时监测位置反馈到MCU,MCU根据监测位置下发控制指令给电控阀,电控阀控制油缸准确升降。
2)左右两侧机械式提升杆总成改用液压油缸左右控制,在挂接的农机具上安装双轴角倾角传感器监测农机具左右水平位置。通过传感器监测的左右两侧倾角,实时控制农机具既可以实现仿地形作业,又可以实现平地作业,实现整地平整,播种深度一致。
3)机械式上拉杆总成改用液压油缸左右控制,两个油缸的进油方式为:左侧油缸有杆腔和右侧油缸无杆腔为同一路;左侧油缸无杆腔和右侧油缸有杆腔为同一路。左侧油缸提升时,右侧油缸下降,该过程可实现左右平衡,也可实现左侧比右侧高或右侧比左侧高,实现仿形作业。
4)在农机上安装双轴角倾角传感器,监测农机具左右、前后位置,使农机具在作业过程中具备地形仿形和平整度作业需求。
3 控制逻辑及实施方案
3.1 控制逻辑
农机具前后、左右控制系统逻辑架构流程(图1、图2)。

图1 农机具前后控制系统逻辑架构流程

图2 农机具左右两侧控制系统逻辑架构流程
3.2 实施方案
左侧升降油缸7、右侧升降油缸8,左侧平衡油缸5、右侧平衡油缸6一端通过销轴连接到提升摆臂50,左侧升降油缸7、右侧升降油缸8的另一端连接到拖拉机本体支座上。左侧平衡油缸5的另一端连接到左侧下拉杆总成2、右侧平衡油缸6的另一端连接到右侧下拉杆总成3;前后平衡油缸4的一端连接到拖拉机本体,另一端连接到农机具300的上悬挂200上。双轴角倾角传感器1安装到农机具变速箱上表面平整的位置,电控阀组10和MCU11安装到拖拉机本体上。农机具300上的左支座201通过销轴100与左侧下拉杆总成2连接,右支座202通过销轴100与右侧下拉杆总成3连接,上悬挂200通过销轴40与前后平衡油缸4连接(图3、图4、图5、图6)。

图3 拖拉机悬挂升降自动平衡系统主视图

图4 拖拉机悬挂升降自动平衡系统剖视图

图5 拖拉机悬挂升降自动平衡系统剖视图
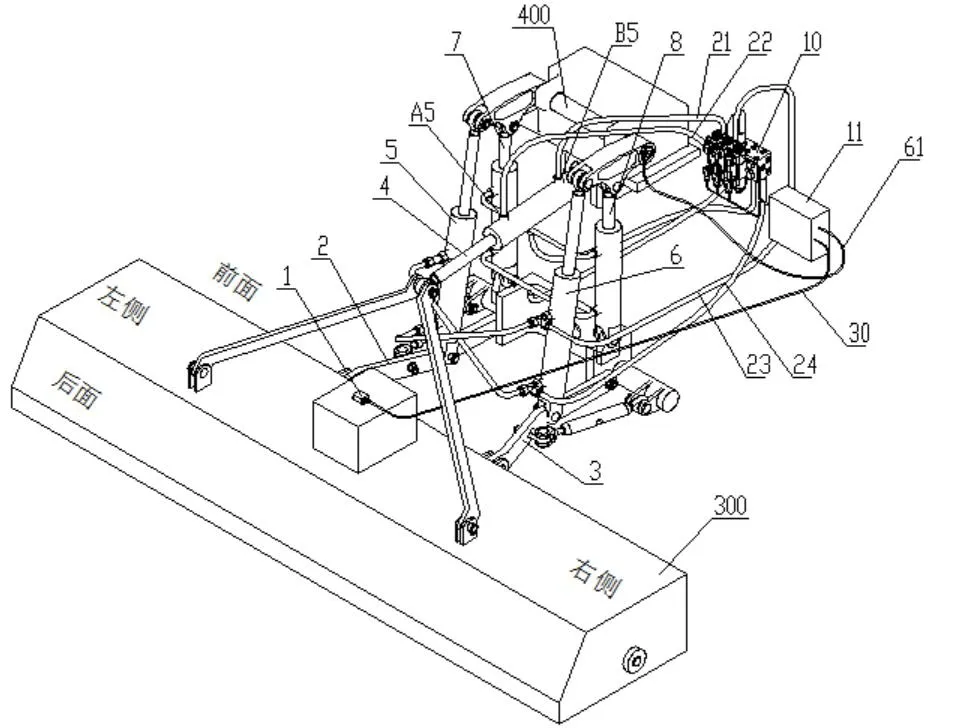
图6 拖拉机悬挂升降自动平衡系统等轴测图
拖拉机牵引农机具300工作时,农机具300作业的高低位置通过安装在悬挂升降提升摆臂50支承轴400上的角度传感器60实时监测。当角度传感器60监测到农机具300位置偏低时,角度传感器60把监测的角度值通过连接在其上的信号线61输入到MCU11,MCU11通过融合算法解析,把信号指令发给电控阀组10,阀组10通过连接在其上的油管25和油管28把液压油从左侧升降油缸7的B3,右侧升降油缸8的B4进入,有杆腔中的液压油通过左侧升降油缸7的A3、右侧升降油缸8的A4回油流进油管27和油管26进入电控阀组,左侧升降油缸7和右侧升降油缸8活塞杆同时同步收回,从而使农机具300提升。角度传感器60监测到农机具达到需求后,MCU11停止给电控阀组10下发指令。反之,当角度传感器60监测到农机具300位置偏高时,角度传感器60把监测的角度值通过连接在其上的信号线61输入到MCU11,MCU11通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管26和油管27把液压油从左侧升降油缸7的A3、右侧升降油缸8的A4进入,无杆腔中的液压油通过左侧升降油缸7的B3,右侧升降油缸8的B4回油流进油管28和油管25进入电控阀组,左侧升降油缸7和右侧升降油缸8活塞杆同时同步伸出,从而使农机具300降低。角度传感器60监测到农机具达到需求后,MCU11停止给电控阀组10下发指令。
通过安装在农机具300上的双轴角倾角传感器1在线实时监测农机具300前后、左右的倾角。如果监测到农机具300前面低于后面,双轴角倾角传感器1把监测的角度值通过连接在其上的信号线30输入到MCU11,MCU11通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管21把液压油从前后平衡油缸4上的B5口进入,有杆腔中的液压油通过前后平衡油缸4上的A5口回油流进油管22进入电控阀组,前后平衡油缸4的活塞杆伸出,从而使农机具前面升高到与农机具后面水平一致。这时,双轴角倾角传感器1可监测到农机具前后水平,MCU11停止给电控阀组10下发指令。反之,如果监测到农机具300后面低于前面,双轴角倾角传感器1把监测的角度值通过连接在其上的信号线30输入到MCU11,控制器通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管22把液压油从前后平衡油缸4上的A5口进入,无杆腔中的液压油通过前后平衡油缸4上的B5口回油流进油管21进入电控阀组,前后平衡油缸4的活塞杆收回,从而使农机具后面升高到与农机具前面水平一致。这时,双轴角倾角传感器1可监测到农机具前后水平,MCU11停止给电控阀组10下发指令。
如果双轴角倾角传感器1监测到农机具300左侧低于右侧,双轴角倾角传感器1通过连接在其上的信号线30把监测角度值输入到MCU11,控制器通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管23把液压油从右侧平衡油缸6上的A2口进入,无杆腔中的液压油通过右侧平衡油缸6上的B2口流进油管24进入电控阀组,右侧平衡油缸6的活塞杆收回,同时油管23把液压油通过油管30从左侧平衡油缸5上的B1口进入,有杆腔中的液压油通过左侧平衡油缸5上的A1口通过油管29和油管24进入电控阀组,左侧平衡油缸6的活塞杆伸出,从而使农机具左侧升高直到与农机具右侧水平。这时,双轴角倾角传感器1可监测到农机具左右水平,MCU11停止给电控阀组10下发指令。反之,如果双轴角倾角传感器1监测到农机具300右侧低于左侧,双轴角倾角传感器1通过连接在其上的信号线30把监测角度值输入到MCU11,控制器通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管24把液压油从右侧平衡油缸6上的B2口进入,有杆腔中的液压油通过右侧平衡油缸6上的A2口流进油管23进入电控阀组,右侧平衡油缸6的活塞杆伸出,同时油管24把液压油通过油管29从左侧平衡油缸5上的A1口进入,无杆腔中的液压油通过左侧平衡油缸5上的B1口流进油管30和油管23进入电控阀组,左侧平衡油缸6的活塞杆收回,从而使农机具右侧升高直到与农机具左侧水平。这时,双轴角倾角传感器1可监测到农机具左右水平,MCU11停止给电控阀组10下发指令。
如果需要农机具300左侧低于右侧,双轴角倾角传感器1通过连接在其上的信号线30把监测角度值输入到MCU11,根据左侧与右侧形成的角度需要,MCU11通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管23把液压油从右侧平衡油缸6上的B2口进入,无杆腔中的液压油通过右侧平衡油缸6上的A2口流进油管24进入电控阀组,右侧平衡油缸6的活塞杆伸出,同时油管23把液压油通过油管30从左侧平衡油缸5上的A1口进入,有杆腔中的液压油通过左侧平衡油缸5上的B1口通过油管29和油管24进入电控阀组,左侧平衡油缸6的活塞杆收回,从而使农机具左侧降低,右侧升高,直到农机具左侧与右侧形成的倾角满足需求。这时,双轴角倾角传感器1可监测到农机具左右倾角,MCU11停止给电控阀组10下发指令。反之,如果需要农机具300左侧高于右侧,双轴角倾角传感器1通过连接在其上的信号线30把监测角度值输入到MCU11,根据左侧与右侧形成的角度需要,MCU11通过融合算法解析,把信号指令发给电控阀组10,电控阀组10通过连接在其上的油管23把液压油从右侧平衡油缸6上的A2口进入,无杆腔中的液压油通过右侧平衡油缸6上的B2口流进油管24进入电控阀组,右侧平衡油缸6的活塞杆收回,同时油管23把液压油通过油管30从左侧平衡油缸5上的B1口进入,有杆腔中的液压油通过左侧平衡油缸5上的A1口通过油管29和油管24进入电控阀组,左侧平衡油缸6的活塞杆伸出,从而使农机具左侧升高,右侧降低,直到农机具左侧与右侧形成的倾角满足需求。这时,双轴角倾角传感器1可监测到农机具左右倾角,MCU11停止给电控阀组10下发指令。
4 结语
通过悬挂升降自动平衡系统及其控制方法的开发与应用,不仅实现了拖拉机在牵引农机具作业过程中的仿形功能,还可以实现平整作业的功能需求。在耕整地环节,能够实现土地表面平整度一致、耕深一致、开沟一致,特别是需要进行起垄种植模式的玉米,通过该套系统可以实现垄面的平整度。在播种环节,既可实现地形仿形播种,还可实现播深一致的功能。农业环节中耕整地的质量直接影响着种子的出苗率、后期的生长率和产量。该平衡系统及控制方法的开发和实际生产中的应用,极大地提高了农机的作业效率,促进了农机作业标准化、智能化以及智慧农业的发展。
猜你喜欢
集装箱化(2022年4期)2022-06-08
汽车零部件(2022年5期)2022-05-30
科学与财富(2021年35期)2021-05-10
科技创新与品牌(2017年9期)2017-10-20
山东工业技术(2017年20期)2017-10-17
中小企业管理与科技·中旬刊(2017年5期)2017-06-06
东方教育(2016年18期)2017-01-16
集装箱化(2016年8期)2016-10-20
科技视界(2016年6期)2016-07-12
科技视界(2016年13期)2016-06-13
