探讨公路项目智能化路基施工分层碾压的算法
2022-10-12 03:57邹进波
交通科技与管理 2022年19期
邹进波
(贵州桥梁建设集团有限责任公司,贵州 贵阳 550001)
0 引言
智能压实控制系统是对数据分析技术、全球卫星定位技术、无线数据通信技术的综合应用,可用于公路路基质量控制中提高管理效率[1]。智能压实控制系统的核心包括碾压层位高精度处理模块、智能化分层碾压模块、碾压层位厚度控制模块等[2]。该文通过智能化算法模拟,进行路基压实自动化分层、厚度精准识别、高程拟合模型的建立,并将其应用于工程实践中。
1 分层碾压施工的算法
公路路基压实施工现场以里程桩号为基础进行施工区域划分,现场带状分布,碾压层位多需人工操作振动压路机进行分层碾压控制,故施工中易出现统计数据误差,导致施工管理获取数据与实际水平之间存在偏差。为提高施工精准度,需以自动智能化技术应用为基础实现路基层位辨识、分层控制、分层厚度自动化管理[3]。
智能化路基施工监控系统借助服务器端完成相关操作,实现自动化层位控制和精准识别。结合公路路基压实施工流程,针对智能化自动分层识别的算法进行优化,详见图1。

图1 公路路基压实自动分层流程设计
(1)系统客户端将路基结构层位信息传送至系统服务器,服务器接收信息后在结构层内根据不同碾压状态展开分层,对应碾压层位数据,根据不同碾压层区域内的控制点Pi,进行层级筛选,对应碾压层内设置1 m×l m网格,自动化划分碾压层位并完成数据处理工作。
(2)Ri为当前振动压路机定位数据,Ri-1为上一次定位数据,将两者对比后系统处理生成振动压路机碾压工作区位图,与区域内的控制点位Pi进行匹配比对后,判断控制点是否在操作区域内,完成几何图形换算,并根据碾压区域内的振动压路机高程值HRi和控制点位高程值HPi计算出高程差H,将碾压区域内控制点的高程值与振动压路机的高程值赋值一致。
(3)以NPi表示碾压区域内的控制点碾压遍数,并对应结构层控制点的设计值,如果NPi≥Ns时进行算法流程的优化,如果不符合上述条件则取NPi+1对碾压区域控制点的碾压遍数赋值。
(4)将振动压路机高程值与碾压区域控制点高程值差H与碾压层设计厚度值Hr进行比较,用RiID表示振动压路机的碾压层位置编号,用PiID表示被控制点所在结构层的碾压层位号。若上述指标满足H>Hr且PiID>RiID,表示振动压路机从路基结构层向碾压位碾压,将振动压路机所处的碾压层位编号RiID进行更新,并将碾压控制区域内的目标控制点层位号进行更新。将两者比较获得碾压层位控制点的高程差数据,根据系统要求和实际状态进行操作指令的发送。
(5)以上述操作为基础,对振动压路机的碾压层位编号RiID进行确认,判断是否进行碾压处理,未处于工作状态时将操作指令下达至下一层碾压层。
(6)振动压路机从路基结构层向碾压层压实操作时,对碾压层位是否存在本层的振动压路机编号进行确认。无对应编号后完成碾压操作,并对操作信息进行传输,确定对应碾压层位的高程值HPi,将相关信息传送至系统客户端[4]。
(7)数据库服务器处理客户端发送的信息,完成监控命令并自动处理分层信息。
2 碾压层位的高程精度控制
对路基碾压层厚的评估需从层位施工后压实厚度和实时碾压厚度两个角度进行,现对振动压实层位压实厚度计算、高程数据处理、精度控制措施等进行分析。
2.1 碾压层位控制点位高程取值
数据库服务器与碾压层位压路机时间序列、定位信息加以匹配,明确目标控制点所在结构层区域的最终高程数据,采用距离加权平均法进行核算,获取准确的数据并与网格控制点相对应,根据实际情况进行修正,详情如下。
(1)假定碾压层对应的网格控制点Pi的坐标为(x0,y0),将该控制点作为圆心进行精准识别,获取对应区域中压路机的Ri点位坐标(xi,yi),可根据两坐标进行振动压路机点位与控制点距离的计算:

(2)碾压完毕之后,验证目标区域网格控制点Pi的高程值,确保施工符合方案要求。设计施工过程中,如果网格控制点的高程值与设计高程值之间符合H>Hr,即控制点的碾压高程值达标;如果网格控制点高程值与设计高程值之间满足H≤Hr,则证实网格控制点高程值存在误差,需要进一步加以处置,详见图2。

图2 碾压区域网格控制点位高程计算
(3)分析网格点位Pi的高程值与设计值之间的关系,如果超过高程差H,则根据距离加权平均法进行处置,扩大区域圆周半径搜索控制网格点高程数据,对Pi数据进行修订后获得正确的高程位置信息,详见图3。

图3 网格控制点位高程计算处理
2.2 碾压层位厚度计算
将不同碾压层的控制点对应的时间序列和位置信息与数据库数据相匹配,获得控制点位Pi在不同结构层的压实高程并用H(m,n,k)表示。(m,n)对应的是碾压层中进行平面化处理的矩阵信息,借助网格控制点进行矩阵信息的详细处置,而k为不同路基结构层的层位顺序,是确定结构上下层关系的基础。根据(m,n)获取控制点不同碾压层位的高程数据,并根据(m,n)和H(m,n,k-1)获取高程值,如果不存在H(m,n,k-1),则表明该碾压层达标,无须进行再次施工。以下为碾压层厚度ΔH的计算公式:

3 工程实际应用
某高速公路路基标段全长9.36 km,为应对特殊天气,路基工程应对措施如下:1)做好人员调度,备足机械设备,在确保工程质量基础上按计划进度施工;2)做好防御措施,避免路基被雨水浸泡影响桩基质量;3)加强现场检测,结合试验路段施工经验保持路基压实6遍以上,根据碾压层实测数据判断网格控制点是否落于施工区域内,避免定位数据点偏移影响实测数据真实性[5-6]。
3.1 分层碾压施工算法的验证
标度路段路基压实施工以智能化路基施工监控系统全程监控跟踪,路堤施工监控分为三个层位,分层识别、精准监控,根据系统提示可获取不同层级的碾压压实遍数[7-8]。控制点点位数据如表1所示,对表1内容分析可知,为控制施工效果需确保施工压实6遍以上,同时需确保每层碾压层厚大于30 cm且小于35 cm。借助智能化路基施工监控系统实时获取分层碾压数据,研究结果显示分层碾压算法与自动化压实分层的现实条件相吻合。
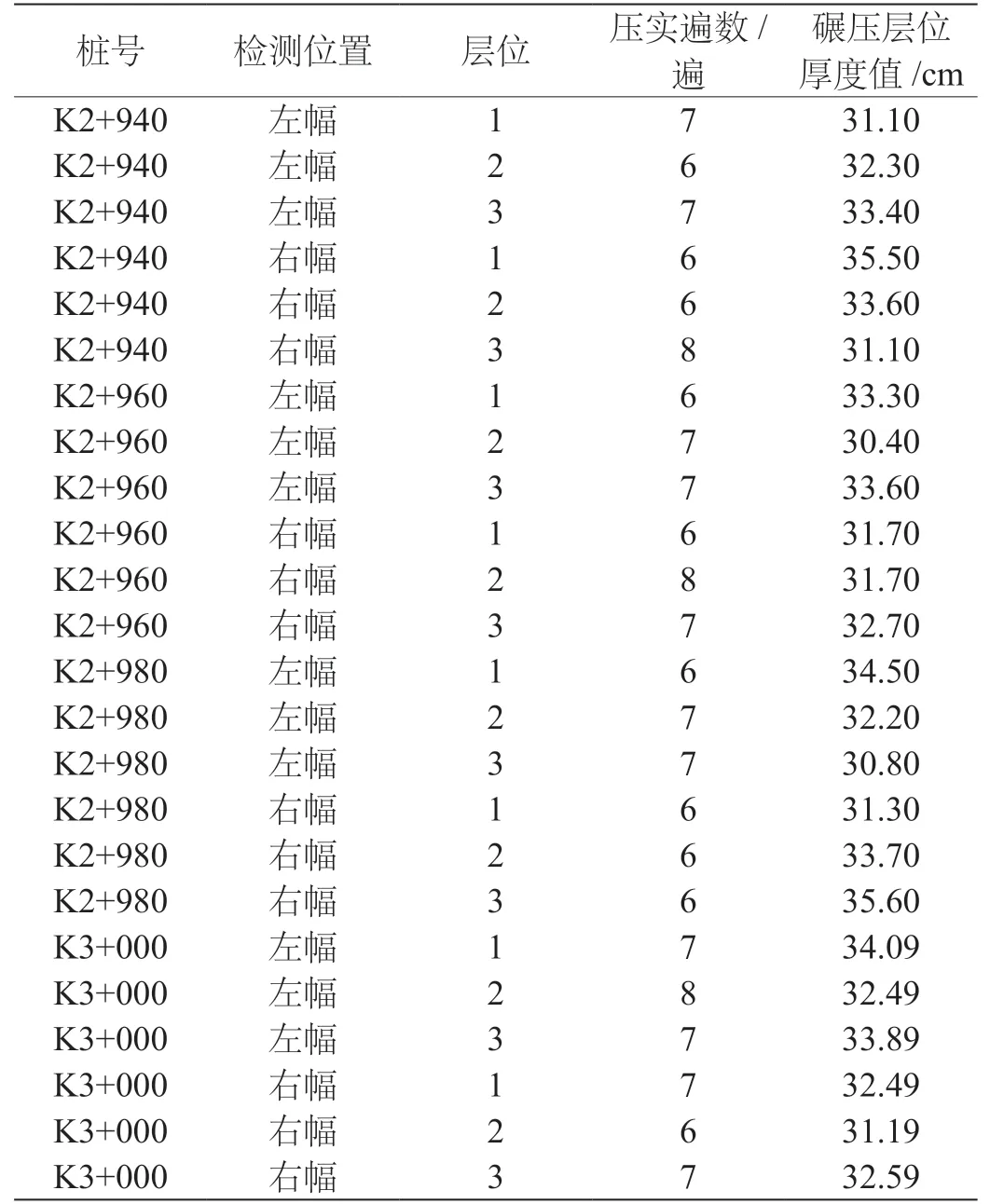
表1 碾压施工自动分层部分控制点位统计
3.2 碾压层位高程精度
以现场检测数据为基础进行不同路基结构层碾压高程数据的对比分析,并将振动压路机在不同碾压层位的测量数据与系统数据相匹配[9-10]。借助全站仪进行第三碾压层区域不同网格点平面中被控制点位位置信息的精准获取,读取位置信息并传输到信息系统中。将被控制区域网格点高程数据和数据库中提取的数值进行对比分析,详见表2。
对表2内容分析可知,网格控制点的实际测量高程值与数据库提取的网格高程数值之间存在±3.5 cm的误差。而根据公路路基高程施工对于精度值的要求可知,系统提取的高程数据间误差基本满足工程需求,即高程精度处理算法应用在工程实践中的效果可观。
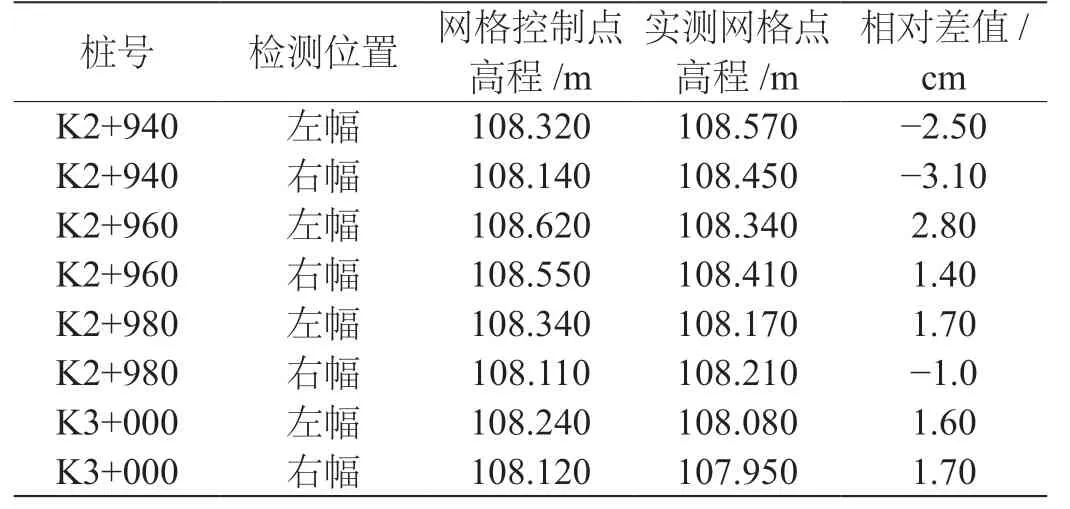
表2 部分网格控制点位高程对比
4 结论
以智能化路基施工监控系统应用为基础,通过距离加权平均算法获得不同路基碾压层位分层数据,结果显示碾压遍数基本符合控制要求,高程定位精度为±3.5 cm满足施工高程差±5 cm的要求。智能化路基施工监控系统应用过程,为降低人工操作可能导致的误差,需要对移动站GPS天线位置的空间坐标进行标定,提高实时监控的精准度。
猜你喜欢
绿色科技(2022年16期)2022-09-15
军民两用技术与产品(2022年1期)2022-06-01
科学与财富(2022年1期)2022-05-31
科技信息·学术版(2022年3期)2022-02-21
动漫界·幼教365(大班)(2021年4期)2021-05-23
思维与智慧·下半月(2021年3期)2021-03-25
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
科学家(2016年10期)2017-09-27
科学与财富(2016年26期)2016-12-01