复合电源电动汽车功率分配与再生制动研究
2022-10-12 05:59姜苏杰王汝佳
机械设计与制造 2022年10期
汪 伟,姜苏杰,王汝佳,罗 金
(江苏理工学院汽车与交通工程学院,江苏 常州 213001)
1 引言
现如今,纯电动汽车越来越受到各国的欢迎,但其也存在着行驶里程短、电池寿命短、充电时间长等三个问题。目前,国内外学者主要通过在汽车储能器中加载超级电容,组成复合电源,并研究其功率分配方式,以期攻克这些难题[1-2]。
复合电源功率分配的策略主要有逻辑滤波控制、小波控制、模糊控制[3]。文献[4]通过CRUISE软件采用模糊逻辑控制分配复合电源功率,验证了它的优越性,但其未对再生制动模型进行开发,能量回收有限。再生制动力的分配方式主要有串、并联、最优能量等[5-7]。文献[8]将制动力按照约束条件分配,避免汽车出现抱死危险状况的同时,提高了制动时回收的能量,但仅根据边界制定控制策略,鲁棒性不强。文献[9-10]将并行控制策略烧录到Freescale单片机中,验证了并行控制策略的有效性,但并未考虑车速对能量回收的影响。
以复合电源电动汽车为研究对象,采用双模糊控制分配电源功率,并基于制动强度、车速、超级电容的SOC值与ECE法规等建立一种新的再生制动力的分配模型。最后,使用模糊控制器协调分配摩擦制动力和电机制动力。
2 复合电源控制器的设计
2.1 双模糊控制器的设计
双模糊控制器参数由Preq、SOCbat、SOCuc、Kuc四个变量组成。其中,Preq为车辆所需的功率;SOCbat、SOCuc分别为蓄电池和超级电容的荷电值;Kuc为超级电容器的输出功率与总功率之比。当Preq>0,将SOCuc和SOCbat分为{LMH},代表{小中大}。将Kuc和Preq分为{TSSMBTB},代表{较小小中大较大}。当Preq<0,电机没有功率输入,模糊控制器的输入变量设置为SOCbatSOCuc,并将其分别分为{LMH}和{TLLMH},Kuc分为{TSSMB}。其隶属函数,如图1、图2所示。模糊控制器规则,如表1、表2所示。
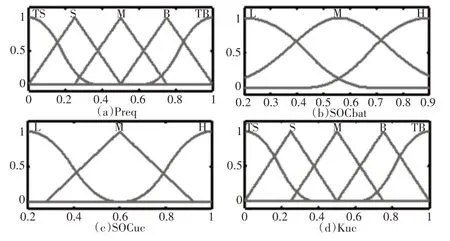
图1 Preq>0 时,隶属度函数Fig.1 Preq>0,Membership Function
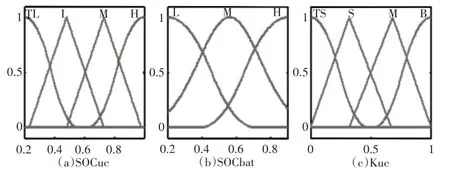
图2 Preq<0 时,隶属度函数Fig.2 Preq<0,Membership Function
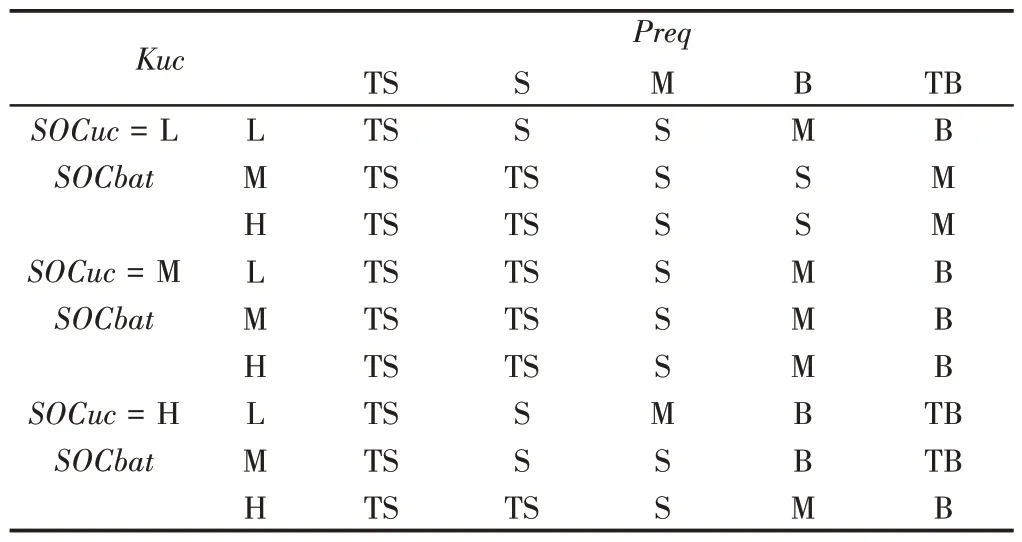
表1 Preq>0 模糊控制器规则Tab.1 Preq>0 Fuzzy Controller Rules
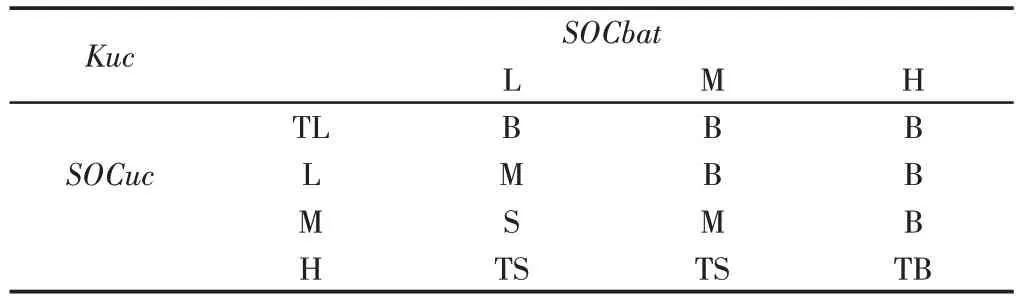
表2 Preq<0 模糊控制器规则Tab.2 Preq<0 Fuzzy Controller Rules
根据上述模糊控制规则,设计的仿真模型,如图3所示。
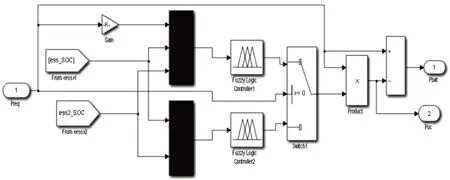
图3 双模糊控制器Fig.3 Double Fuzzy Controller
2.2 模糊-逻辑控制器的设计
模糊-逻辑联合控制策略如下:车辆在行驶状态下采用模糊控制,在制动状态下采用逻辑门控制。当超级电容的SOC值在设定的阈值内,则Preq=Puc,否则Puc=0。根据逻辑门控制建立的负功率分配模型,如图4所示。
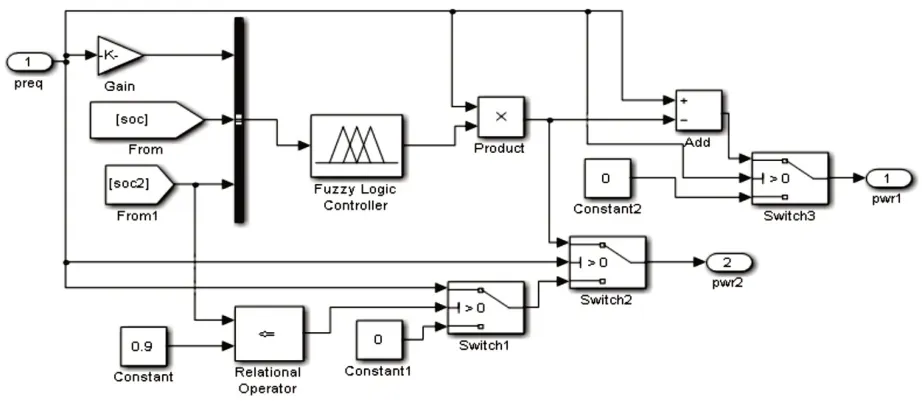
图4 模糊-逻辑控制器Fig.4 Fuzzy-Logic Controller
2.3 基于MATLAB的仿真结果分析
针对某款单电源小型电动汽车组成复合电源,在UDDS道路工况下,进行仿真分析。电动汽车整车参数,如表3所示。
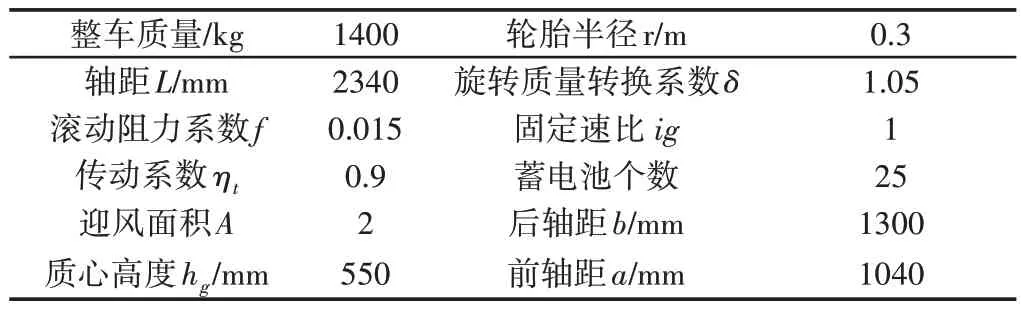
表3 整车参数Tab.3 Vehicle Parameter
双模糊控制和模糊—逻辑控制下电池和超级电容的SOC对比曲线,如图5所示。
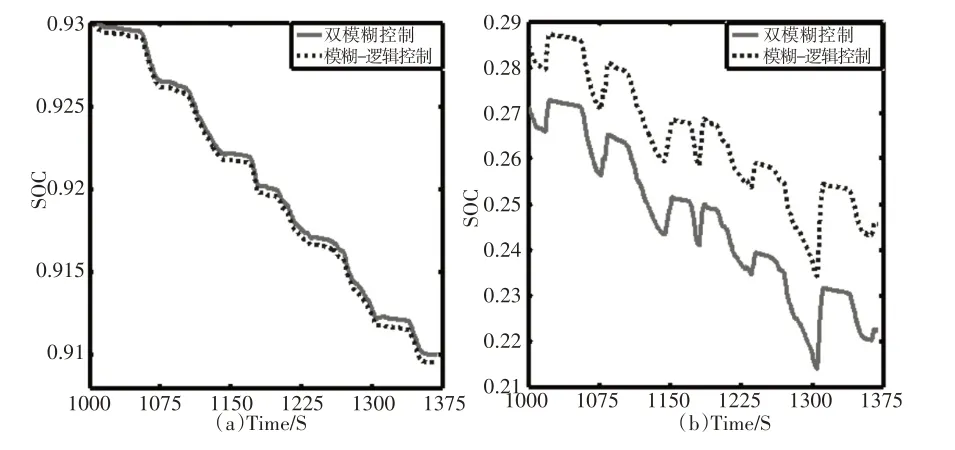
图5 电池和超级电容的SOCFig.5 SOC of the Battery and Supercapacitor
由图5(a)可知,采用双模糊控制的电池SOC下降趋势较为平缓,能量消耗较少。这是因为采用双模糊控制策略,汽车在制动时,电池能够回收能量而采用模糊-逻辑控制仅由超级电容回收制动能量,故其超级电容回收的能量多于双模糊控制。因此,由模糊-逻辑控制的超级电容的SOC下降趋势小于双模糊控制。这一点由图5(b)也可以验证。
单个工况下汽车的总能耗对比曲线,如图6 所示。由图可知,双模糊控制的汽车消耗的能量比模糊-逻辑控制小5KJ。两种控制策略下电池与超级电容的电流对比图,如图7所示。由图7(a)、图7(b)可知,超级电容均承担着需求的峰值功率。当时间在1000s后,由于超级电容的电量消耗过大,因此降低超级电容的功率分配值。同时,电池承受的电流冲击相差不多。综上所述,双模糊控制的控制效果总体优于模糊-逻辑控制。
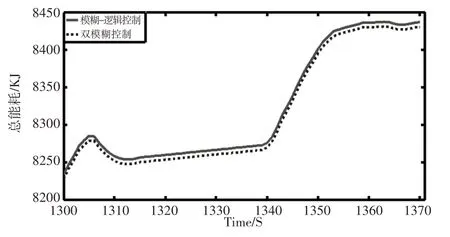
图6 单个工况总能耗Fig.6 Total Energy Consumption Under Single Working Condition
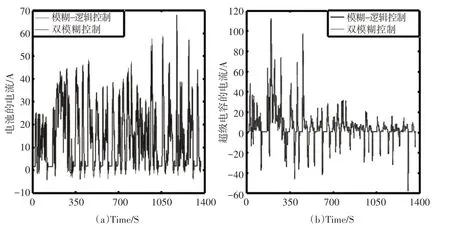
图7 电池和超级电容的电流Fig.7 Current In Batteries and Supercapacitors
3 再生制动力模型
3.1 再生制动力的分配模型
原ADVIOR 模型中根据查表法对制动力进行分配,该方式简单且能够回收一定的能量,但其统计的车速较少,且仅靠车速确定电机制动力的比例,而未考虑储能元器件的SOC值、电机转速特性以及ECE法规等因素的影响,回收的能量有限。
汽车制动时存在三种情况,前轮先抱死;后轮先抱死;前后轮同时抱死。
三种情况下,前后轮制动力大小满足,如式(1)所示。
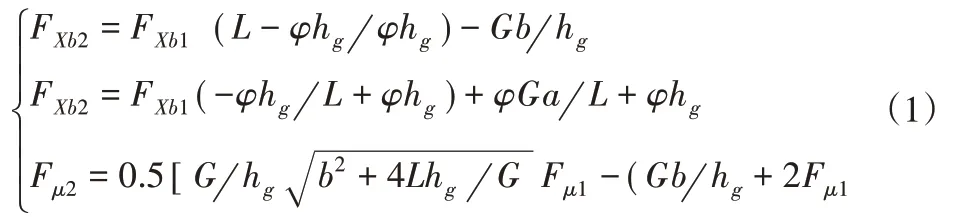
式中:FXb1FXb2—地面对前后轮制动力;φ—附着系数;L—汽车轴距;hg—质心高度;a、b—前、后轴距;Fμ1、Fμ2—前、后轮制动器制动力。
根据ECE R13 法规,前后轮制动力还应该在ECE 线上。ECE关系,如式(2)所示。

此外,当制动力完全由电机提供时,对应的制动强度,如式(3)所示。

式中:T—电机最大转矩;η—电机效率;i0—主减速比。设汽车载重500kg代入上表参数,可得电机完全制动对应的制动强度为0.133。
通过以上分析,制定的再生制动力模型,如图8所示。
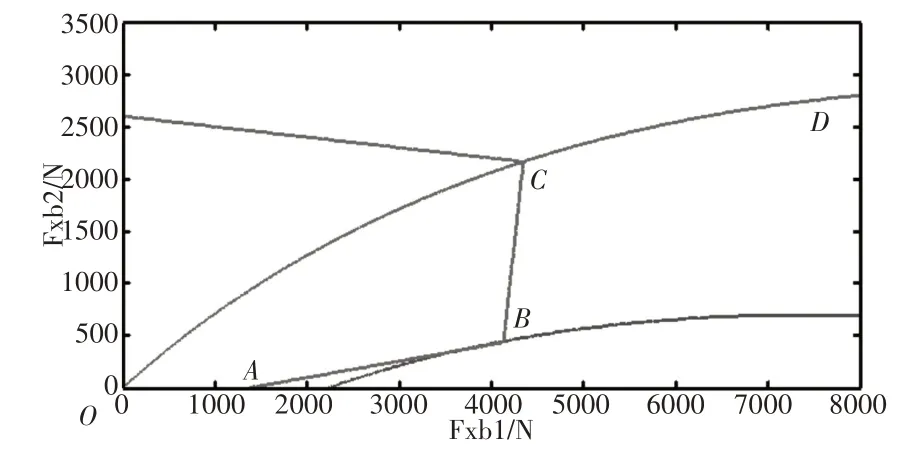
图8 再生制动模型的分配曲线Fig 8 Distribution Curve of Regenerative Braking Model
图中,A、B、C三点对应的制动强度分别为0.133、0.33 和0.47。当制动强度小于0.133时,此时仅由电机制动,制动力遵循OA线分配。AB线为ECE线的切线。当制动强度在[0.133 0.33)时,制动力分配遵循AB线。C点为过B点的f线与I曲线的交点。当制动强度在[0.33 0.47]时制动力分配遵循BC线。当制动强度大于0.47时,制动力分配遵循CD线。
3.2 基于模糊控制的再生制动力的分配策略
研究发现,当车速<15km/h时,采用电机制动几乎回收不到能量。
紧急制动时,若采用电机制动则汽车的安全性不能保障。因此,模糊控制器输入参数设为制动强度Z、超级电容的SOC值以及车速V并将三者划分为3个等级,输出参数为电机制动力占前轮的总制动力的比例Kuc并将其划分为11个等级,其隶属度函数和规则,如图9、表4所示。后、前向再生制动力模糊控制器模型,如图10、图11示。
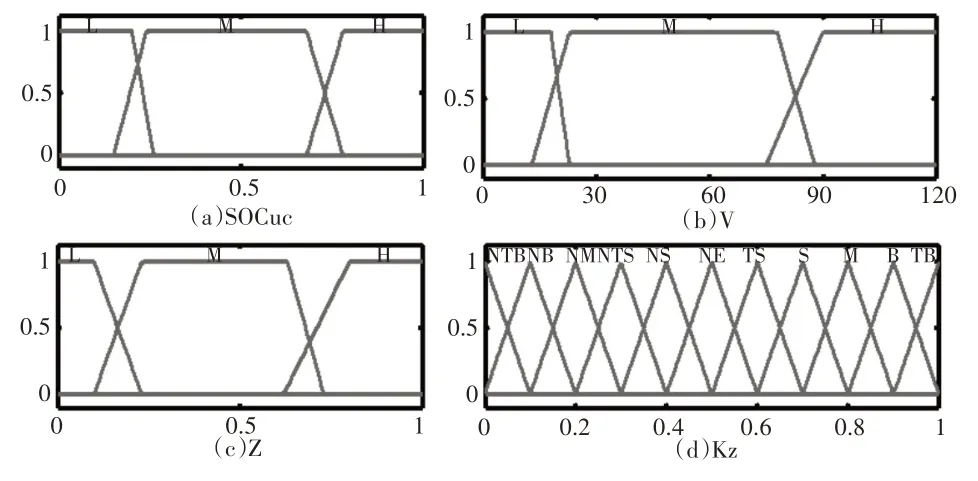
图9 模糊控制器隶属度Fig.9 Membership Degree of Fuzzy Controller
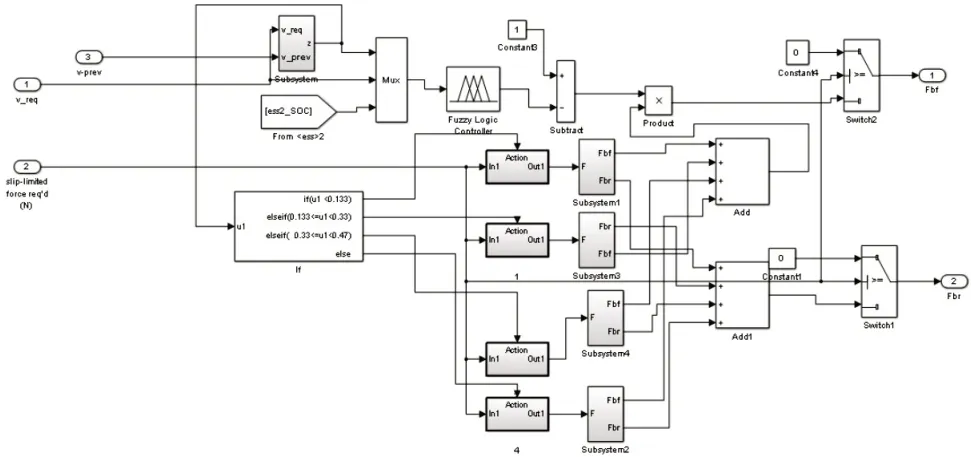
图10 后向制动力模型Fig.10 Backward Braking Force Mode
图11 前向制动力模型Fig.11 Forward Braking Force Model
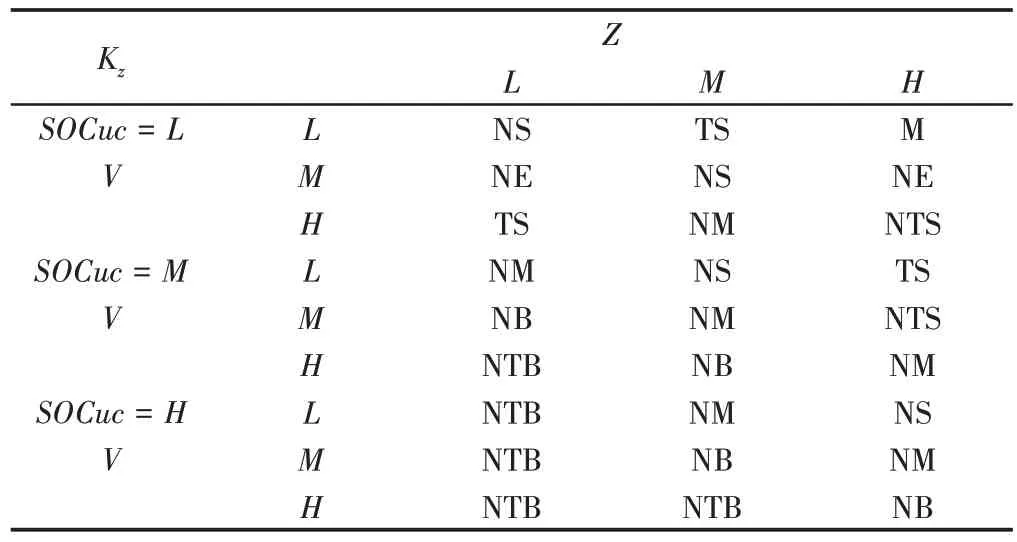
表4 控制器规则Tab.4 Rules for Controllers
3.3 仿真结果分析
再生制动力控制策略改进前后电池和超级电容的SOC对比曲线,如图12 所示。
由图12(a)可知,改进后的再生制动力控制策略使得电池SOC下降进一步变缓,单个UDDS 工况下,改进前后电池SOC 值相差0.01。
由图12(b)可知,改进后的再生制动力控制策略使得超级电容回收了更多的能量,单个UDDS工况SOC相差0.2。
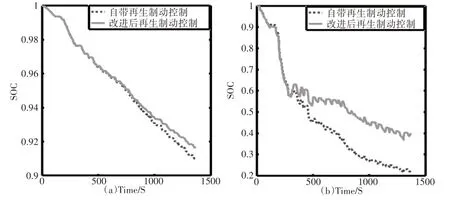
图12 电池和超级电容的SOCFig.12 The SOC of Supercapacitor and Battery
再生制动力控制策略改进前后电池受到的电流冲击对比曲线,如图13所示。
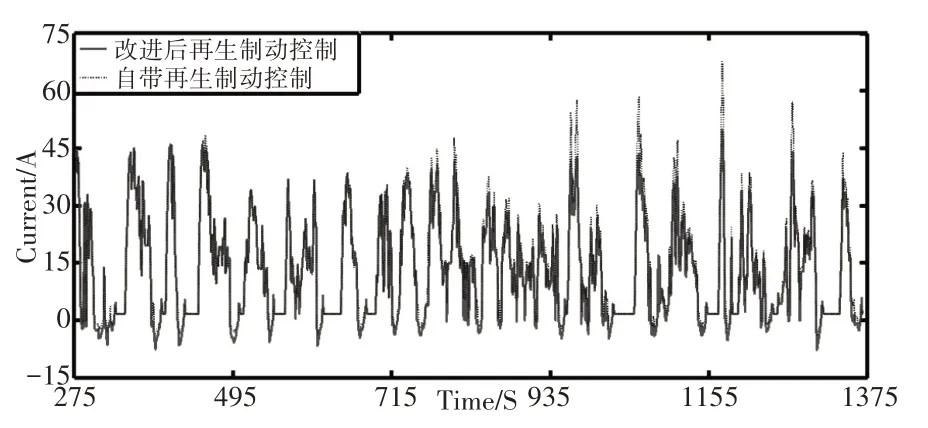
图13 电池电流Fig.13 Current in Battery and Supercapacitor
从图13中可以明显看出,在正功率状态下,电池受到的冲击最大减少20A。同时,在负功率状态下,电池充电电流也有一定的提升。
4 结论
(1)分别采用双模糊控制以及模糊-逻辑控制分配复合电源的功率,通过电池及超级电容的SOC、电流、温度和能耗的对比曲线选取两者间最为合适的一种。
(2)基于制动强度z、车速v、超级电容的SOC 值和ECE 法规等建立一种新的再生制动力的分配模型,并通过模糊控制器协调摩擦制动及机械制动力的力矩分配,使得控制效果进一步提高。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年3期)2022-06-17
能源工程(2022年2期)2022-05-23
汽车实用技术(2022年3期)2022-02-23
电机与控制学报(2018年9期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
微型计算机(2010年10期)2010-09-09