一种姿态控制电动轮椅的结构设计与研究
2022-10-12 05:59王慧,王晨,王琢
机械设计与制造 2022年10期
王 慧,王 晨,王 琢
(东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
1 引言
由于年龄增长、意外事故等诸多因素造成的肢体残疾人的数量在持续增长,轮椅作为腿脚不便者的代步工具,在日常生活中扮演着越来越重要的角色。
为方便使用和控制轮椅,人们提出了很多轮椅控制的方案。该类研究大部分着眼于轮椅平台上的附件,过于追求智能化,而缺少了轮椅本身驾驶的操控性和舒适性的研究[1]。
不同于其他的控制方式,姿态控制轮椅适用于上身运动机能健全的群体,通过使用者在轮椅上身体姿态的变化来控制轮椅的行驶状态。躯干的直接控制,可以提高使用者的参与感[2],不易发生误操作[3]。
使用者坐在姿态控制轮椅上,由姿态的变化改变重心的位置,并将重心的偏移信号有效传递至控制系统中来实现对轮椅行驶的控制。为了实现这一功能,设计出了一种结构。
该结构在实现使用功能的基础上,可以通过调节座椅位置,实现轮椅行驶的稳定性[4]。并针对轮椅行驶过程中所产生的振动,设计了减震机构,为验证其减震效果,对座椅进行了振动分析。
姿态控制轮椅作为一种轮椅的控制方式,可以与轮椅上的其他智能化设计相结合,使轮椅能够满足更多的功能需求。
2 整体的结构设计
2.1 工作原理
在操纵轮椅时,使用者坐在座椅上,通过身体姿态的变化改变重心位置,从而可实现座椅水平面上受力分布的变化。在座椅平面上对称布置四个点A,B,C,D,并在其下端安装传感器,如图1所示。
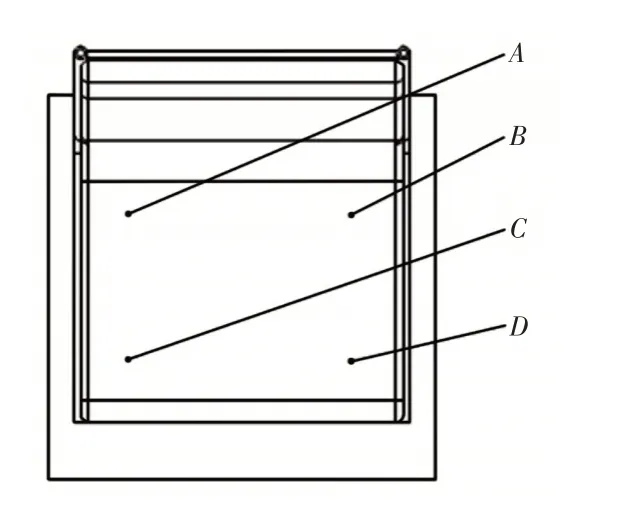
图1 传感器的位置Fig.1 Location of Sensors
由座椅下的传递机构将驾驶座上A,B,C,D四个点所受到的力传递到对应的应变式力传感器上,传感器将其转化成电信号输入到轮椅上的控制系统上,控制系统根据输入信号对轮椅的行驶状态进行控制,从而实现了通过改变身体姿态控制轮椅的目的。
2.2 传递机构的结构设计
在座椅平面A,B,C,D四个位置的下方分别设置一组传递机构。座椅下铰链与座椅固定,并与上端导轨铰链相铰接。上端导轨铰链与上端导轨滑块固定,该两部件可实现在上端导轨的单向滑动。下端导轨滑块与下端导轨铰链固定,可实现在下端导轨的单向滑动。上端导轨滑块与下端导轨滑块的滑动方向相互垂直,且上端导轨与下端导轨分别固定于导轨座的上下两面。传力杆上端与下端导轨铰链相铰接,传力杆下端固定在应变式力传感器上。在轮椅踏板与传递机构间加减震结构。整体结构简图,如图2、图3所示。
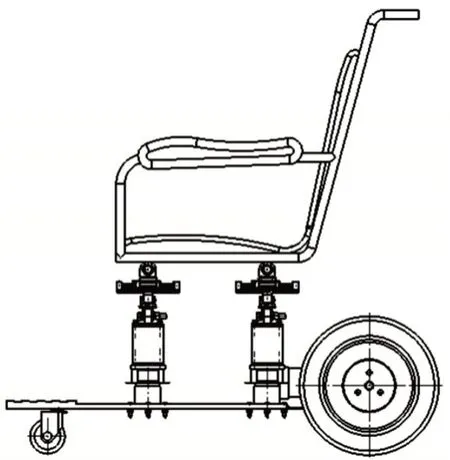
图2 姿态控制轮椅右视图Fig.2 The Right View of Posture Control Wheelchair
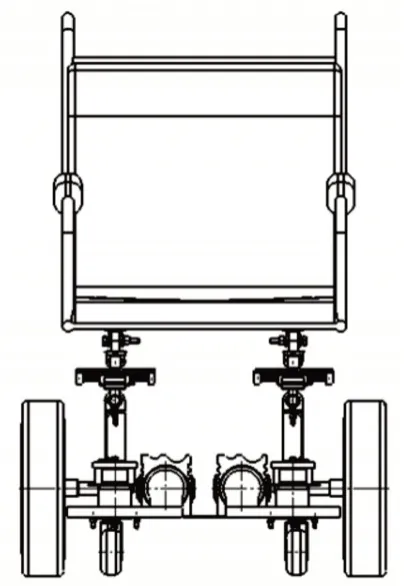
图3 姿态控制轮椅后视图Fig.3 The Rear View of Posture Control Wheelchair
2.3 稳定性分析
通过铰链和导轨等部件,传递机构实现了较小位移的补偿。在没有位移补偿的情况下,由于A,B,C,D四个位置下方的应变式力传感器垂直方向承受载荷的不同,其应变所产生的微小的高度差,会造成整个座椅的结构变形。如图4所示,a和b为两侧传力杆,两杆均垂直于地面,a和b两杆水平间距为d。E点和F点为座椅下铰链固定于座椅平面的位置,EF长度为d。当a传力杆因承受载荷较大而产生一垂直于地面方向的位移x时,通过导轨滑块G和H在水平方向相对于导轨的位置调整,有效避免了传力杆等随工况的不断变化而产生变形。
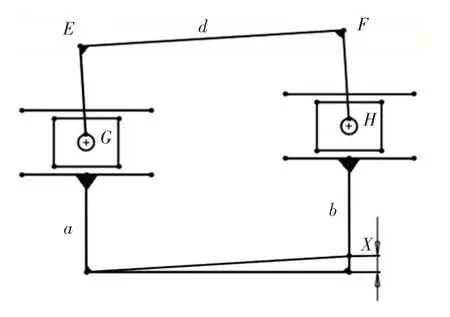
图4 避免结构变形示意图Fig.4 Schematic Diagram of Avoiding Structural Deformation
当轮椅行驶于不平路面时,轮椅结构整体产生一倾角θ。OO’为垂直于地面的法线,a和b两传力杆处于倾斜位置,座椅平面PR也处于侧倾状态,此时以O点为中心形成转矩,如图5所示。通过S和T两导轨滑块在导轨上的滑动,可以实现座椅平面PR到P’R’的位置变化的可能,通过减小转矩的力臂h的大小,提高使用者者乘坐的稳定性。
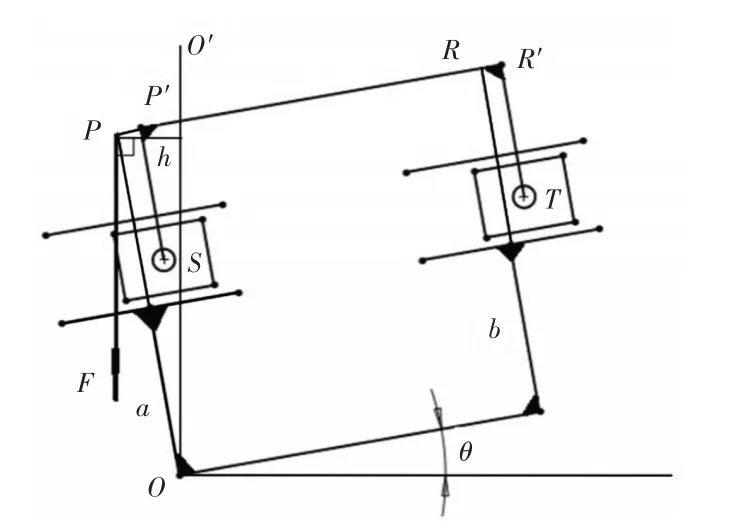
图5 倾斜情况示意图Fig.5 Schematic of Tilting
3 传递机构的减震设计
在轮椅行驶过程中所产生的振动通过传递机构中的传力杆,传力杆上铰链,导轨,导轨座,座椅下铰链等部件传递至座椅,影响了使用者的乘坐舒适度[5]。为减小振动所带来的影响,在应变式力传感器下端设计减震结构。
减震结构,如图6所示。
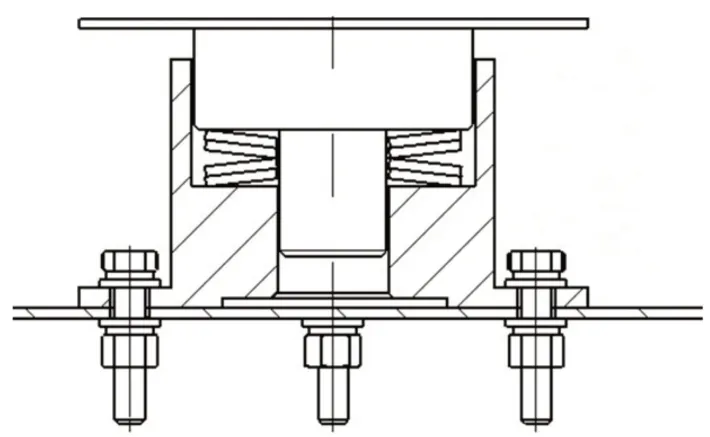
图6 减震结构图Fig.6 Structural Diagram of Shock Absorption
传力杆将垂直方向载荷向下传递到应变式力传感器上,应变式力传感器固定在传感器下支撑座上,轮椅踏板上固定座固定于轮椅踏板上,在传感器下支撑座与轮椅踏板上固定座之间加装弹性元件。碟形弹簧变形小承载能力高,节约空间,且碟形弹簧较螺旋弹簧的吸震性能强,故采用碟形弹簧作为传感器下支撑座与轮椅踏板之间连接的弹性元件。该减震结构通过碟簧与碟簧之间摩擦产生的阻尼,可有效吸收振动能量[6],且组合碟簧的刚度在考虑径向约束影响后比无径向约束时明显偏大[7]。根据负荷和变形量的要求,确定碟簧的组合方式为两片碟簧叠合为一组,两组碟簧对合的复合组合。
4 座椅的振动分析
座椅动态舒适性与座椅和人体的振动特性密切相关[8]。在(4~8)Hz这个频率范围内,人的内脏器官产生共振,人体会感觉很不舒适。为验证传递机构的减震设计对轮椅乘坐舒适性的影响,将座椅结构三维模型导入ADAMS仿真软件中进行振动分析。以传力杆下方的轮椅踏板作为激励源,让传递机构和座椅处于垂直于地面的受迫振动状态下。
4.1 座椅的模态参与因子分析
在受迫振动情况下,座椅在某些频率处会出现响应的峰值,这些峰值是由各个模态的响应叠加而成。通过分析系统的模态,可以得出系统中各阶模态的模态频率,而各阶模态频率对系统受迫振动的影响是不同的。各阶模态对受迫振动的影响程度取决于模态参与因子[9],模态参与因子作为判断响应各个输出模态贡献度的相对大小的依据,可以通过模态参与因子分析来查找峰值频率处的响应是由哪些主要的模态响应叠加而成,并通过模态参与因子在其峰值上的频率和该模态的固有频率的对比,分析各阶模态对座椅的振动的影响。
绘制传力杆未加减震结构情况下座椅上模态参与因子的变化曲线,如图7所示。在(0.1~100)Hz范围内,第3阶模态的模态参与因子较大,参与频率响应最多,且在(8.0~9.0)Hz之间存在模态参与因子的峰值,该峰值所对应的频率与第3 阶固有频率较为接近,座椅在此频率下容易产生共振。第2 阶模态在(0.1~100)Hz 之间也有一定的参与量,在(8.0~20.0)Hz 间出现两个峰值。
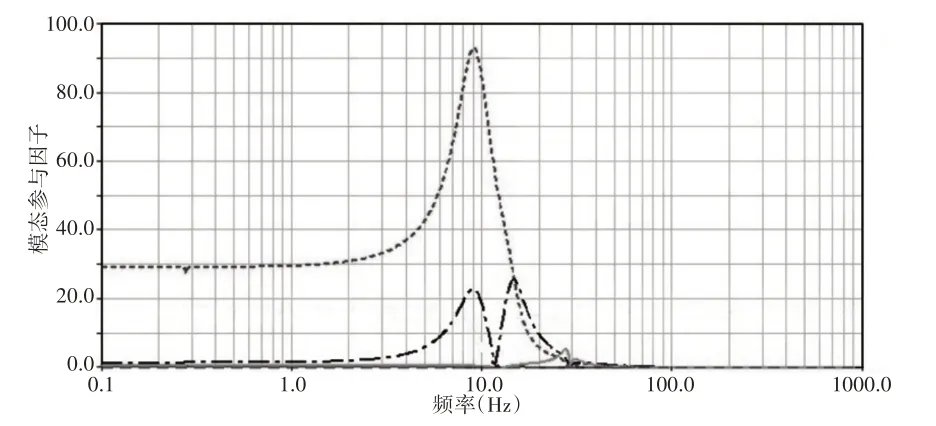
图7 未加减震结构模态参与因子Fig.7 Model Participation Factor of Undamped Structure
绘制传力杆加减震结构后的座椅在(0.1~1000)Hz范围内模态参与因子的变化曲线,如图8所示。在整个频率范围内第2阶模态的模态参与因子最大,参与频率响应最多,在10.0Hz附近存在模态参与因子的峰值,其所对应的激励频率与第2阶模态的固有频率接近。第1阶模态也有很大的参与量,在10.0Hz附近存在该阶模态参与因子的峰值,其对应的激励频率与第1阶模态的固有频率较为接近。
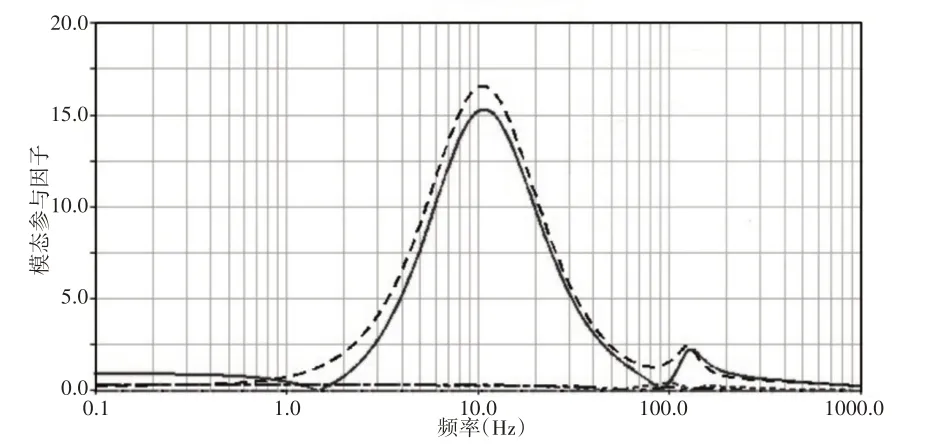
图8 加减震结构模态参与因子Fig.8 Model Participation Factor of Damped Structure
将图7和图8对比分析可知,两种情况下座椅在某阶模态固有频率附近均会出现该阶模态的共振,但未加减震结构的座椅的模态参与因子大于有减震结构的座椅模态参与因子,因此在轮椅行驶条件下的某阶模态固有频率附近,加减震结构的座椅振动幅值要小于未加减震结构的座椅。
4.2 座椅的频率响应分析
在传力杆下端位置处的轮椅踏板分别对两种结构施加5组大小等值递增的正弦激振力,以座椅的中心位置竖直方向作为输出通道,绘制座椅的频率响应曲线,纵坐标为频率响应的振幅,如图9、图10所示。
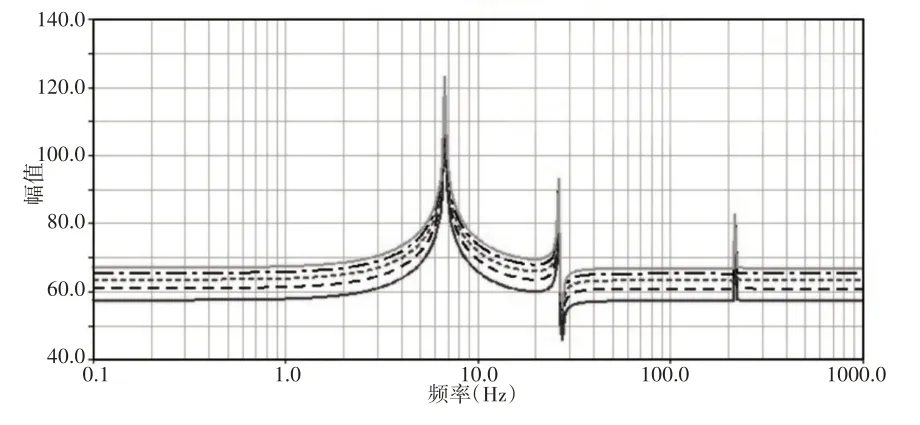
图9 未加减震结构频率响应曲线Fig.9 Frequency Response Curve of Undamped Structure
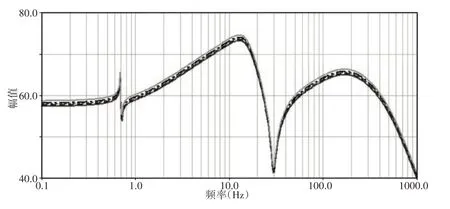
图10 加减震结构频率响应曲线Fig.10 Frequency Response Curve of Damped Structure
从图9和图10可以看出,随着激振力的增加,频率响应的幅值也在相应增大。未加减震结构的频率响应在7Hz附近达到峰值,由模态分析结果可知,该峰值主要由第3阶模态影响,且在该峰值频率下,使用者会感到很不适。
在30Hz附近和200Hz附近存在较小的峰值,这两个峰值主要由第3阶模态和第2阶模态影响。加减震结构的频率响应在10Hz附近达到峰值,该峰值主要由第2阶和第1阶模态影响。加减震结构的频率响应在(100~200)Hz之间存在一个较小的峰值,该峰值主要由第2阶和第1阶模态所影响。通过两种情况下的对比可得,未加减震结构的频率响应振幅总体大于加减震结构频率响应振幅。因此,减震结构可有效减小振动对轮椅使用性和乘坐舒适性等造成的影响。
5 结语
目前在对电动轮椅的控制研究中有很多不同的控制方式,但与姿态控制电动轮椅相关的研究较少。与其它种类的轮椅控制方式不同,姿态控制电动轮椅通过身体姿态的变化,实现了对轮椅行驶的控制。针对该姿态控制电动轮椅设计的结构实现了姿态控制的要求,且有一定的补偿和调节功能,可以保证轮椅行驶的稳定性。为减小行驶时振动对座椅舒适度的影响,设计了减震结构,并通过模态参与因子和频率响应曲线分析验证了其减震效果良好。姿态控制电动轮椅作为一种电动轮椅的控制方式,可以与轮椅上其他智能化设计相结合,为未来电动轮椅控制等方面的研究提供了参考。
猜你喜欢
中国畜牧杂志(2022年10期)2022-10-12
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
弹箭与制导学报(2020年1期)2020-07-09
现代计算机(2020年12期)2020-06-08
轻兵器(2019年8期)2019-08-30
无线互联科技(2017年17期)2017-09-18
软件导刊(2017年1期)2017-03-06
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年1期)2015-04-13