基于图神经网络的交通流预测*
2022-10-14 06:54赖俊龙
计算机时代 2022年10期
赖俊龙
(华南农业大学数学与信息学院,广东 广州 510642)
0 引言
交通流预测是智能交通系统中的重要成分,准确、有效的预测能够改善和缓解城市的交通问题。然而,由于交通路网拓扑结构的约束和交通流随时间变化的规律,即:空间依赖性和时间依赖性,交通流预测成为一个有挑战性的问题。
传统的方法有ARIMA、卡尔曼滤波模型等,它们难以处理有较强不确定性的数据。因此,如K 近邻模型、支持向量机模型等机器学习方法被提出,它们能够对高维和非线性特征的数据进行建模,然而,这些模型在捕获空间相关性上存在局限性。为此,Jiang 等将交通网络视为图像并用卷积神经网络来捕获空间特征;Cheng等将卷积神经网络与循环神经网络(Recurrent Neural Network,RNN)结合来学习时空相关性。但交通网络并不像图像那样是规则的结构,于是,图卷积神经网络(Graph Convolutional Network,GCN)被提出并用于特征学习。Zhao 等将GCN 与RNN结合提出了T-GCN模型;Li等提出扩散卷积门控循环单元,并结合编码器-解码器结构提出了DCRNN模型,但这些模型的预测效果还有待提高。
为应对上述挑战和问题,提出多分辨率时空注意力网络(Multi-Resolution Spatio-Temporal Attention Network,MRSTAN),以便有效地利用时空特征,进而提高预测的精准度。
1 本文模型
图1为模型的框架,主要包括空间模块、时间模块和融合模块三个组件。

图1 多分辨率时空注意力网络框架
1.1 空间依赖性
传统GCN 采用的图结构是静态的,不能正确的描述流量之间的依赖关系。如图2 所示,道路1 发生交通事故后,随时间演变会影响到道路2、3、4 处的交通情况。
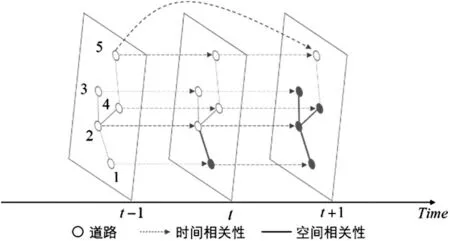
图2 交通流时空相关性
为了能自适应地学习空间结构,采用了Guo 等提出的空间注意力,具体公式为:




1.2 时间依赖性
RNN 常用于序列数据,但其存在梯度消失和梯度爆炸等缺陷。其变体LSTM 和GRU 可以解决这些缺陷,其中LSTM 比GRU 结构更加复杂,训练时间更长。因此,选择GRU模型获取时间依赖性,其具体公式如下:


1.3 多分辨率融合
交通流具有周期性,不同的分辨率下,它们之间的相似性有助于模型更好地学习到其中的规律。如图3所示,2022年2月27日7:30-8:30为要预测的真实数据,其与昨天、上周同一时段的车流量具有相似的趋势,例如都在第5个观测点附近达到最低点,在接近第7个观测点达到最高峰,都具有继续上升的趋势。

图3 交通流时间周期性



2 实验
2.1 数据集
实验中,采用PeMS-04 和PeMS-08 高速公路数据集,对其进行归一化并按照6:2:2 的比例随机划分成训练集、验证集和测试集。
2.2 基线方法
为了评估模型的性能,将MRSTAN与以下基线方法进行了比较。
T-GCN:它在静态图上进行图卷积,并结合循环神经网络进行交通流预测。
Graph WaveNet:是一种使用自适应图表示和扩张卷积的深度学习框架。
ASTGCN:它是基于注意力的时空图卷积网络,利用时空注意力机制分别对时空动态进行建模。
STSGCN:利用多个局部的时空子图模块直接同步捕获局部时空相关性。
STGODE:一种基于神经微分方程的交通流预测框架,使用了连续的图卷积和扩张卷积进行预测。
2.3 实验设置
所有实验均在Linux 服务器上进行(CPU:Intel(R)Xeon(R) Gold 5218,GPU:GeForce RTX 2080 Ti)。均采用60 分钟作为历史时间窗口,并预测未来60 分钟的交通流状况。基线方法都遵循其论文中报告的最佳参数和结果。对本模型而言,所有隐藏维度都设置为64,采用三阶的切比雪夫多项式进行图卷积,空间模块层数为2,Adam 优化器的学习率为0.001,采用L1 范数作为损失函数,使用MAE、RMSE 和MAPE 作为性能指标,batchsize为32,训练代数为250。
2.4 实验结果及分析
实验结果如表1 所示,从中可知,在PeMS-04 上,本文方法各指标均优于最佳基线方法STGODE,在PeMS-08数据集上,MAPE比STGODE略差0.23%,但MAE 和RMSE 分别获得了2.63%和1.45%的改进,这些结果证明了模型的有效性。

表1 算法实验结果
2.5 消融实验
为了验证本方法不同模块的有效性,设计了两个变体:①-A:没有注意力机制;②-F:没有融合机制。实验结果见图4,显然,两个变体误差更大,表明模型的组件都是有效的。此外,没有融合机制的模型表现最糟糕,表明本文提出的融合模块的重要性。

图4 总体误差
3 结束语
针对交通流预测效果不佳的问题,提出多分辨率时空注意力网络。先用注意力图卷积操作获取空间特征,再用GRU 获取时间特征,最后融合不同时期的交通流进行预测。实验表明,该模型优于基线方法。未来可以将其应用于其他时空相关性预测问题上,如天气预测、气候变化预测等。
猜你喜欢
四川党的建设(2022年8期)2022-04-28
高技术通讯(2021年3期)2021-06-09
小学生学习指导(低年级)(2020年11期)2020-12-14
科学(2020年5期)2020-11-26
作文大王·低年级(2018年10期)2018-12-06
舰船电子对抗(2016年5期)2016-12-13
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
数学年刊A辑(中文版)(2014年1期)2014-10-30
航天器工程(2014年5期)2014-03-11