嘉定区无人农场的技术路线
2022-11-23 07:45冯敏康
农业开发与装备 2022年10期
冯敏康
(嘉定区农机技术推广站,上海市 201800)
1 无人驾驶农业机械的技术路线
农业机械进行无人化改装的关键点就是如何将模拟信号转化为农业机械实际动作的方法。以下就是上海市嘉定区无人农场中对农业机械进行无人化改装的技术路线。
1.1 拖拉机的换向控制
现有拖拉机的换向方式一般分为两种:一种是拨杆拨到相应方向位置时停止(久保田135 G拖拉机),另一种是前进、后退拨杆拨到相应方向位置时会反弹回原位置(凯斯2254拖拉机)。
针对第一种换向方式的拖拉机,在改造时模拟其各个方向动作在操作时产生的电信号即可;针对第二种换向方式的拖拉机,在改造时模拟各个方向位置在操作时产生的电信号以及其在原位置的电信号即可。
1.2 拖拉机的换挡控制
进行换挡时需要按下相应的换挡按钮,改变其电信号进行加减挡。现有拖拉机的换挡方式一般分为两种:一种是换挡按键可以一直加减到指定的高挡位或低挡位(久保田135 G拖拉机);另一种是换挡按键到达区间最高挡位后,必须同时按下高挡位保护按钮才可以再往更高挡位加或减(纽荷兰1654拖拉机)。
针对第一种换挡方式,在改造时,模拟以下电信号:加挡或减挡按键按下时同组线路中的各个线路电信号变化、松开时同组线路中的各个线路电信号变化;针对第二种换挡方式,在改造时,模拟以下电信号:加挡或减挡按键按下时同组线路中的各个线路电信号变化、松开时同组线路中的各个线路电信号变化、高挡位保护按钮按下按钮相连的线路电信号变化、高挡位保护按钮与加(或减)挡按钮同时按下,其相连的各个线路电信号变化。
1.3 插秧机的秧台控制电控改装
秧台抬升、下降位置的控制由原来的手动机械控制实现电动控制,通过加装一款电机,不带自锁装置,可以灵活地进行伸长与缩短,也是市面上使用比较多的标准驱动电机,使用预先测量、设计好的结构件或者进行更换后的结构件进行相连接,一端与电机首端进行相连接,另一端与秧台连接的关键性结构件相连接,而电机的尾端通过对应的结构件连接于车体的固定位置,从而通过电机伸长与缩短的长度,进行控制秧台的抬升、下降,使得插秧机秧台可以通过对应的指令,达到自动控制的效果,实现自动控制。
1.4 插秧机的速度控制电控改装
插秧机的速度控制,由原来的手动机械控制实现电动控制,通过加装对应的自锁电机进行达到电控的效果,此种电机类型市面上使用标准电机也是比较多,使用预先测量、设计好的结构件或者更换后的结构件进行相连接,一端与电机首端进行连接,另一端与速度控制连接的关键性结构件进行相连接,而电机的尾端通过对应的结构件连接于车体的固定位置,且结构件首端位置含有滑槽,可以实现手自动一体,通过发送指令由对应的电机的伸长与缩短进行控制速度的加速或者减速,从而实现插秧机速度的控制。
1.5 植保机的智能喷雾控制
北斗智能喷雾控制系统,是一套机电液一体化的流量控制系统,利用北斗卫星导航系统的定位及速度等信息,结合压力传感器、流量计等传感器信息,通过控制器自动化、智能化的方式控制开关阀、比例阀等,进一步实现打药机精确、精准流量控制。
系统可以根据实际作业范围设置药量进行作业,能够精确控制喷口的开合,自动调节药液喷洒,实现打药作业范围内打药均匀的效果。系统还支持信息化回传,能够实时上传作业信息,控制中心可实时监控作业位置、打药量、作业面积以及作业质量等。
1.6 收割机HST手动改电控
HST手改电指的是将机械操作,改为电动操作,操控起来方便省力。原车的变速手柄控制方式是人手操作变速杆,引起变速连杆动作,实现后退、停车、前进以及速度变化。手动改电控后,变速手柄和变速连杆之间增加了角度传感器和带有模拟反馈的推杆电机。手改电后的控制方法是人手操作机械手柄,手柄带动角度传感器做动作,会相应地产生一个角度变化,变化量输入到驱动控制器,驱动控制器根据该角度变化量,驱动推杆电机产生相应动作,推杆电机带动变速连杆动作,这样就实现了变速功能。
1.7 收割机离合装置电控改装
原车离合装置由驱动皮带轮、从动皮带轮、传动皮带、张紧轮组成,离合装置结合时,拉动手柄,通过拉线传动带动张紧轮将驱动皮带轮和从动皮带轮之间的皮带拉紧,增大摩擦,使从动皮带轮跟随驱动皮带轮转动,带动脱谷滚筒或割台的工作机构运转,离合分离时松开拉线,皮带松开,从而切断工作装置的动力来源。
原车纯机械离合装置通过加装执行电机、拉线和安装结构件,使其能够实现驱动器控制,将原车的纯机械结构改为电控,便于无人驾驶系统控制,当控制离合结合时,执行电机运转将拉线拉紧,带动原车离合机构的张紧轮收紧,就能实现机械离合的电动控制,且当电控机构不工作时,不影响原车手动操作。
1.8 收割机遥控卸粮
相比于拖拉机遥控功能,收割机的遥控还增加了遥控卸粮功能,当粮桶满时,可在手机端查看粮仓状态,此时通过遥控驾驶将车辆驾驶到卸粮点,通过遥控调整粮桶位置,让其对准运粮车,点击卸粮按钮即可开始卸粮,卸粮结束后断开卸粮离合,操作粮桶回位,再通过手机APP控制车辆行驶到需要作业的位置,点击开始作业即可继续作业。
该功能真正实现了收割机作业过程中不需要人操作车辆,将人从恶劣的作业环境中解放出来,大大降低了人的劳动强度,甚至可以一个人控制多台车辆作业。
2 无人农场的相关数据
自无人农场项目建设以来,嘉定区农机技术推广站进行了针对无人农机耕、种、管、收的数据测试,并与人工作业进行了比较。由于拖拉机的改装涉及动力换挡和动力变向,而动力换挡和动力换向兼具的拖拉机不适用于嘉定的水田,所以在拖拉机的改装方面存在有局限性,使得无人拖拉机的工作质量与人工有所差异,故无法获得准确数据。
2.1 无人插秧机的作业数据
无人插秧机试验的机具为洋马VP8D水稻插秧机,试验田块为外冈的高水平良田,适用性较为广泛。其次,该田块情况良好、软硬程度适中,适合无人驾驶技术试验的开展,提升试验数据准确性。试验数据如表1、表2所示。
由试验数据(表1、表2)计算可知:无人驾驶的作业效率为0.46 hm2/h,人工驾驶的作业效率为0.53 hm2/h。
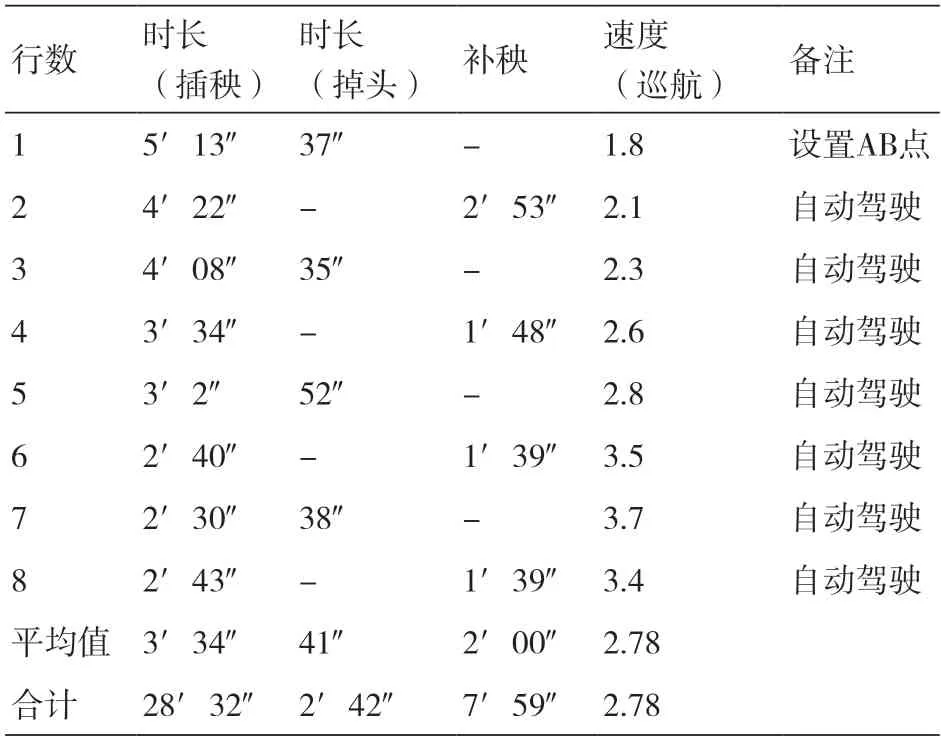
表1 无人驾驶插秧机作业数据(单位:km/h)

表2 人工驾驶插秧机作业数据(单位:km/h)
2.2 农业无人机的作业数据
无人植保作业选择以丸山自走式喷杆喷雾机与农业无人机作对比。由表3、表4可见,经计算自走式喷杆喷雾机在大田中平均每亩作业时间均为1.6 min,农业无人机平均每亩作业时间均为1.24 min。作业效率上农业无人机是自走式喷杆喷雾机的1.2倍左右。但随着单块田块情况变化,自走式在小田块、不规则田块、鱼塘田中效率将远低于农业无人机。
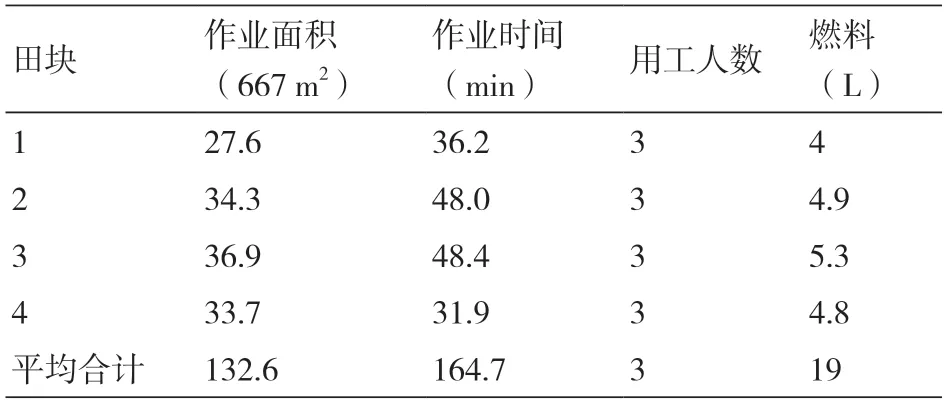
表3 农业无人机作业数据
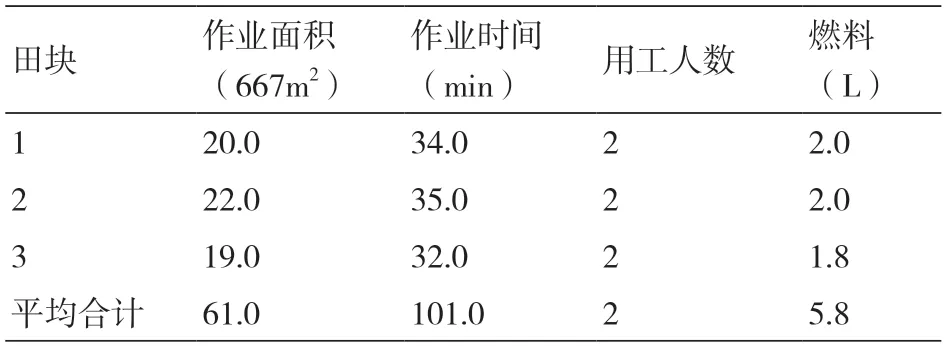
表4 自走式喷杆喷雾机作业数据
2.3 无人收割机的作业数据
无人收割试验的机具为洋马YH6118水稻收割机,试验数据如所示。由试验数据(表5)计算可知:无人驾驶的作业效率为0.37 hm2/h,人工驾驶的作业效率为0.424 hm2/h。
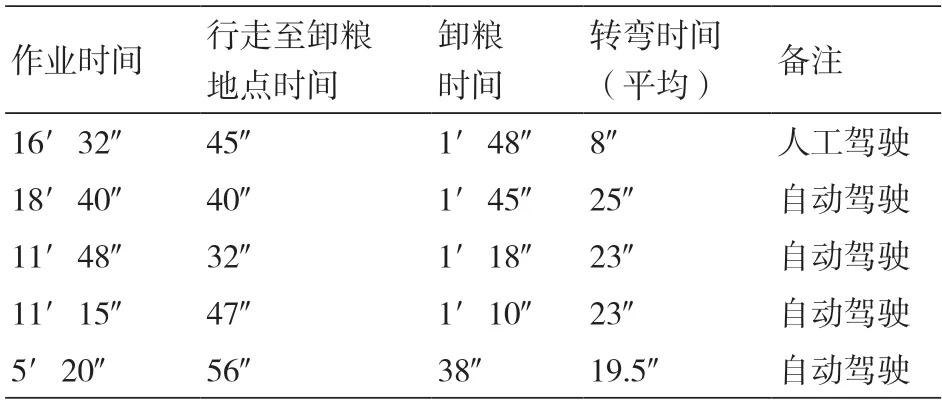
表5 无人驾驶收割机作业情况表(0.29 hm2无人驾驶+0.12 hm2人工驾驶)
3 结语
1)无人插秧和无人收割的工作效率会略低于人工驾驶,但是采用无人驾驶可大幅度降低人工成本。目前,嘉定区高水平设施良田机械插秧作业效率约为5.53~6.67 hm2/天,用工平均成本为13.75元/667m2。无人农场采用智能驾驶系统,作业效率约为5.13~6.46 hm2/天,且由于无需摆秧工,平均成本降至7.2~9元/667m2。经试验对照,相同作业条件下,无人驾驶较人工驾驶可以节约一个人工,平均成本大幅降低。
2)田块条件良好情况下,农业无人机与自走式植保车作业速度无明显差异,但在田块条件复杂情况下,无人机不受地域条件约束,作业效率高、作业效果良好。
同时,数字化无人农场的应用改变了农业生产对劳动力的强依赖性,重新定义农业人才的新标准,管理、技术复合型人才已然成为嘉定区都市型农业人才的培养方向,找到了“谁来种地、如何种地”的答案。
猜你喜欢
南方农机(2022年23期)2022-12-01
成都信息工程大学学报(2021年4期)2021-11-22
农民致富之友(2020年10期)2020-05-11
建材发展导向(2019年3期)2019-11-28
表面工程与再制造(2019年6期)2019-08-24
科技传播(2019年24期)2019-06-15
消费导刊(2018年10期)2018-08-20
北京航空航天大学学报(2017年9期)2017-12-18
数学大王·低年级(2017年9期)2017-09-18
青年文学家(2016年34期)2017-03-31