
基于LSTM的飞控系统状态监控
2022-11-23 07:03王凤芹耿宝亮
海军航空大学学报 2022年5期
王凤芹,高 龙,李 瑛,耿宝亮
(海军航空大学,山东烟台 264001)
0 引言
随着无人机的广泛应用,其飞行安全已成为当前无人机领域重点关注的问题。无人机飞控系统作为无人机核心分系统,其性能直接影响着无人机的飞行性能与飞行品质。同时,其工作状态也直接影响着无人机的飞行安全。为了对无人机飞控系统的工作状态进行监控,国内外学者都进行了大量研究与尝试。
文献[1-3]采用扩展卡尔曼滤波器(Extended Kalman Filter,EKF)方法分别对飞控系统中的攻角传感器、空速管和执行机构进行了状态监控与故障诊断,但该方法存在计算成本高、对于非线性系统模型线性化效果较差等缺点。
随着传感器技术和通信技术的飞速发展,无人机飞控系统(简称“飞控系统”)采集得到的数据日益增多。利用无人机大量历史飞行数据来分析预测无人机各部件的工作状态已成为可能;文献[4-5]利用飞参数据进行航空发动机使用寿命预测;文献[6]提出了基于飞参多源信息融合的无人机飞行安全评估方案。从这些文献可以看出,基于飞参数据监控系统工作状态是可行且有意义的。文献[7]提出了基于卷积神经网络和长短期记忆网络(Long Short Term Memory Network,LSTM)的飞控系统剩余寿命预测方法,利用卷积LSTM提取飞控系统状态参数时间序列信息,建立不同状态参数之间的时间与空间相结合的剩余寿命预测时序学习网络,从而实现飞控系统的剩余寿命预测。文献[8-12]基于学习网络开展飞机的故障诊断或状态监控;文献[13-18]基于飞机的飞行数据,诊断系统的故障和识别安全风险。从这些文献可以看出,基于飞行数据采用学习网络开展无人机系统的故障诊断与安全风险监控是可行的、有效的。然而目前,基于飞参数据对飞控系统的状态监控的文献却较少。
为了更好地监控飞控系统的工作状态,保证无人机的飞行安全,构建基于LSTM的飞控系统状态监控模型:模型以无人机实际飞参数据为输入,以飞控各组成部分的状态参数作为LSTM 的输出参数,通过LSTM 的训练,建立从输入参数到无人机飞控系统状态参数的映射关系,利用训练好的网络模型预测飞控系统的状态参数,为无人机飞控系统的监控提供决策支持。
1 无人机飞控系统状态监控建模
1.1 问题描述
飞控系统是指能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行的控制系统,是无人机的大脑。以固定翼无人机为例,飞控系统是由飞控计算机、传感器、执行机构和飞控软件组成,如图1所示,其主要功能是完成无人机的方向舵、升降舵、襟副翼、油门、刹车和起落架等的控制,使飞机完成转弯、爬升、俯冲和横滚等动作。完成这些功能的自动控制回路,如图2所示。飞控系统首先借助大量传感器实时采集各部件的飞行状态数据,实时接收地面测控站发出的控制命令和飞机状态参数的给定期望值;然后,依据飞行控制律进行计算处理;最后,输出控制指令给执行机构,控制舵机实现对无人机的控制[19]。

图1 固定翼无人机飞控系统组成结构Fig.1 Composition of fixed-wing UAV flight control system
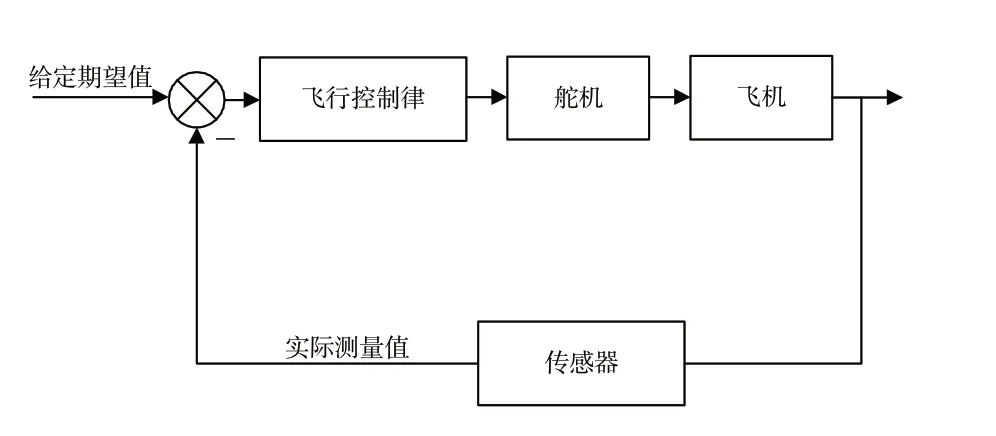
图2 无人机飞控系统的自动控制回路Fig.2 Automatic control loop of UAV flight control system
飞控系统的状态监控模型是指建立输入飞参数据与传感器和各执行机构的状态参数的回归映射关系,以实现飞控系统的状态监控。对于飞控系统的传感器来说,其主要是通过对比同一个参数的多个传感器的采集结果来实现监控,监控参数,如表1所示。
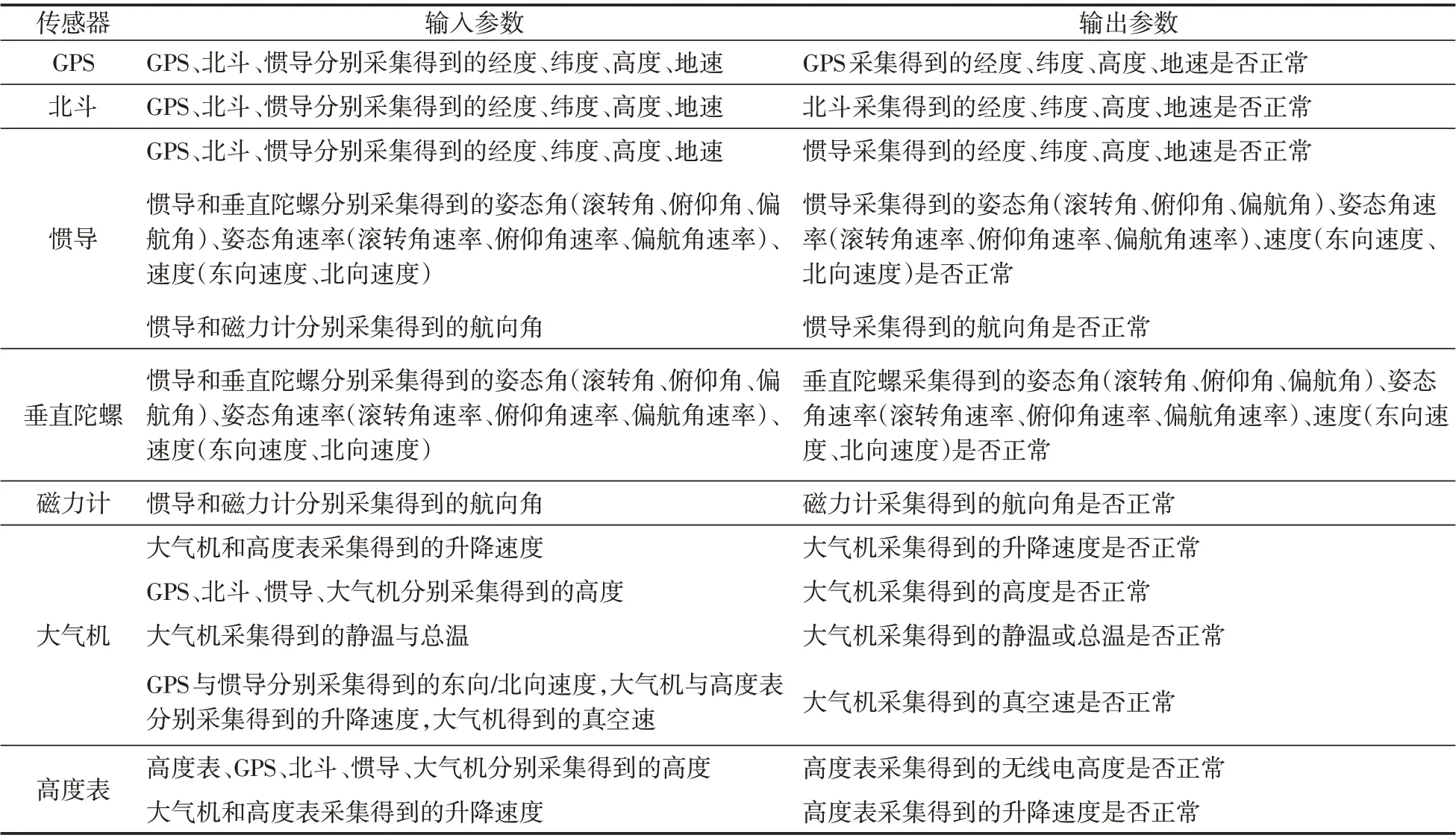
表1 飞控系统各传感器监控参数表Tab.1 Monitoring parameter table of each sensor of flight control system
对于同一个飞参数据,利用不同传感器采集得到的结果存在误差:误差在允许的阈值范围内,则说明各传感器工作状态正常;若误差太大或者出现异常跳变,则说明传感器可能出现故障。
对于飞控系统除起落架之外的其他各执行机构,依据其主要功能和不同飞行阶段下的飞行控制律,确定其监控模型的输入、输出参数,如表2所示。
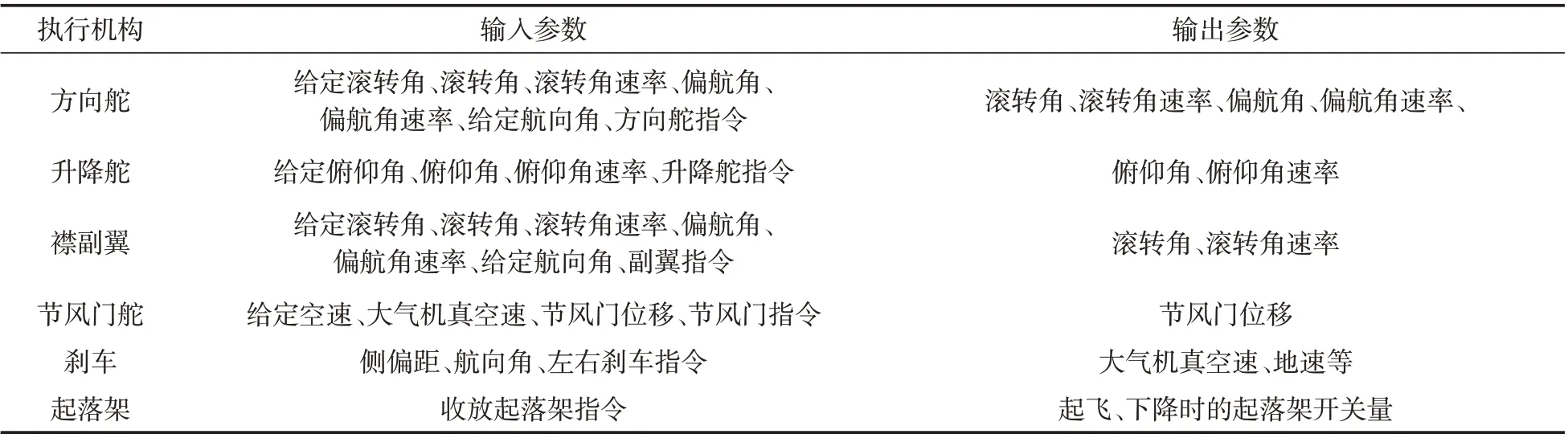
表2 飞控系统各执行机构监控参数表Tab.2 Monitoring parameter table of each actuator of flight control system
构建从输入参数到各执行机构状态参数的回归映射网络模型,利用无人机历史飞参数据训练模型,利用训练好的网络模型,预测各执行机构的状态参数,通过对比实测值与预测值之间的差异,实现对各执行结构的状态监控。由于飞机的起落架属于机械装置,只有收、放2 个动作,无过程数据,因此,不需要构建网络模型进行监控。
1.2 飞机的运动学方程
飞机的3个姿态角(滚转角ϕ、俯仰角θ和偏航角ψ)、3个姿态角速率(滚转角速率p、俯仰角速率q和偏航角速率r)、后一个时刻的3个姿态角(滚转角ϕ̇、俯仰角θ̇和偏航角ψ̇)满足运动学方程(1):
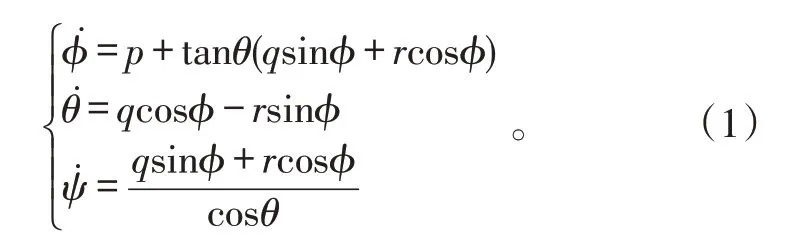
该运动学方程成立的前提条件包括:飞机是刚体,而且质量不变,地球固定于空间,不考虑地球自转、公转的影响。因此,实际飞参数据中,姿态角与姿态角速率的关系并不满足该方程,而且姿态角与姿态角速率的实际取值与飞控给定的值有很大关系,因此,需要构建网络模型建立实际各参数值之间的回归映射关系。
1.3 基于LSTM的飞控系统监控模型
1.3.1 LSTM模型概述
LSTM 是1 种递归神经网络(Recurrent Neural Network,RNN),是专门用于处理时间序列数据的神经网络,其特点是同一隐藏层中的节点要进行信息传递构成循环学习。RNN经常出现梯度消失情况,偶尔发生梯度爆炸,针对此问题,LSTM 被提出,该网络因能够保持信息的长期存储而得名。
LSTM 是在RNN 隐藏层的每个节点神经元之间构建了3个门——遗忘门f、输入门i和输出门o,通过门结构控制信息在网络中的状态,3 个门组成的记忆单元,如图3所示。
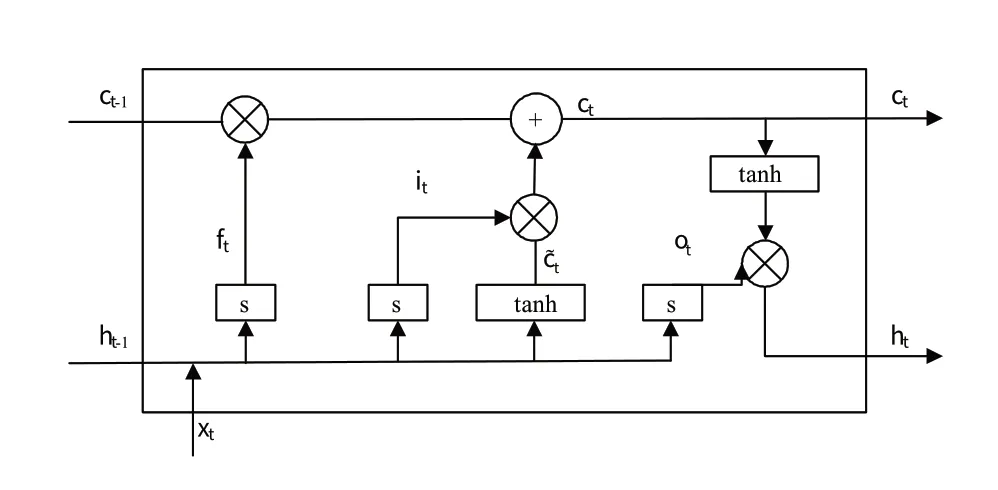
图3 LSTM门结构图Fig.3 Structure diagram of LSTM gate
在时间步t时,LSTM隐藏层的输入向量为xt,输出向量为ht,记忆单元为ct。
遗忘门:
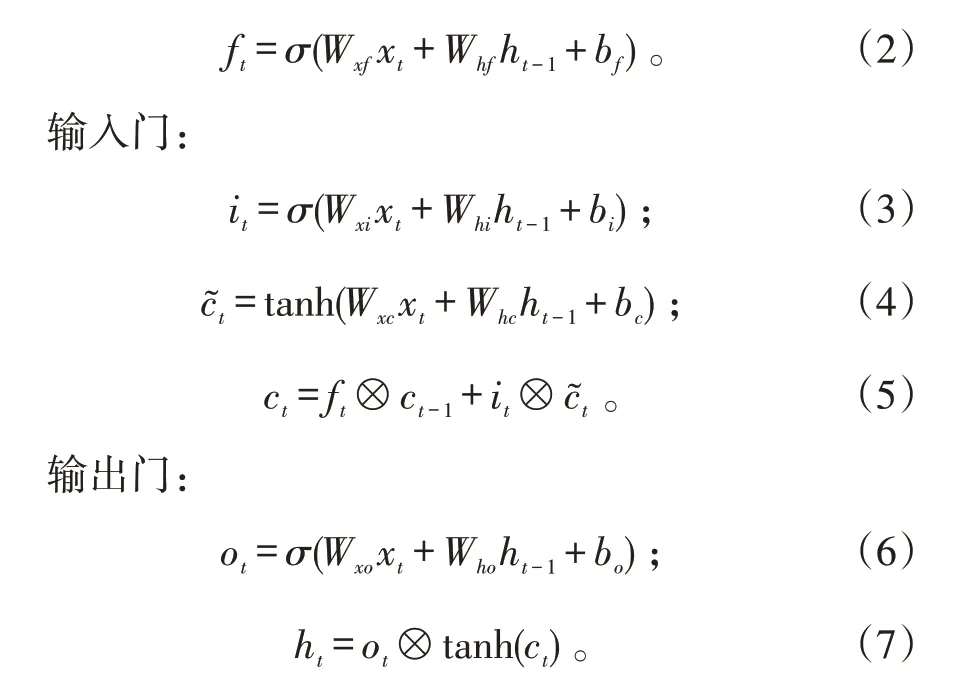
式(6)(7)中:⊗表示向量元素对应乘;W表示权重;σ是sigmod 函数;b是偏置项;tanh 是双曲正切函数。通过记忆单元和门控单元实现历史信息和长期状态的保存,通过遗忘门使得LSTM能够学习连续任务,并对内部状态进行重置。
1.3.2 基于LSTM的飞控系统监控模型设计
基于LSTM的飞控系统监控模型,如图4所示,步骤如下。
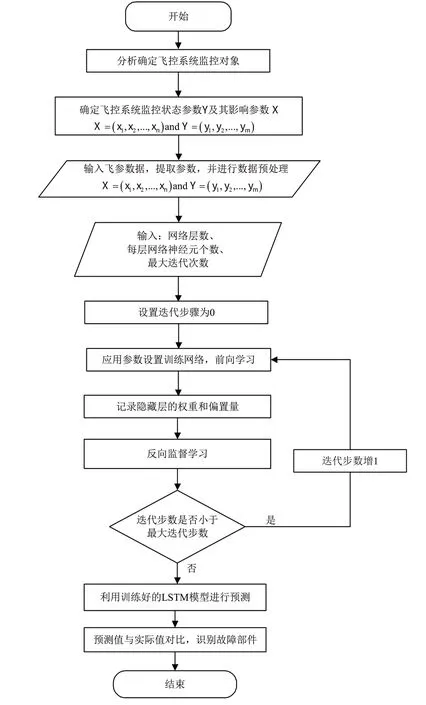
图4 基于LSTM的飞控系统监控模型Fig.4 Monitoring model of flight control system based on LSTM
1)通过分析飞控系统的三大组成,确定监控对象飞控系统的传感器和执行机构。
2)依据运动方程,确定输入参数X和监控状态参数Y;读入无人机所有飞参数据,从中提取参数X和参数Y,对数据进行预处理,包括去噪声、平滑和归一化处理。
3)设计LSTM层数,每层神经元个数和最大迭代次数。
4)训练网络,前向计算每个神经元的输出值,记录隐藏层的权重和偏置量。
5)反向计算每个神经元的误差项,根据相应误差项计算每个权重的梯度,进行反向监督学习,更新权重矩阵和偏置项。
6)通过多轮迭代收敛,求解得到LSTM的最优参数。
7)利用训练好的LSTM模型预测参数,通过实际参数值与预测值对比,识别可能存在的故障部件,并进行预警提示。
2 实验与结果分析
2.1 实验数据
选取某型无人机实际飞行数据作为实验数据,从中抽取传感器与执行机构工作状态相关的特征参数进行监控,监控参数,如表1所示。选取无人机实际飞行的20 000 条数据作为样本构建模型,其中,前70%为训练网络模型数据,中间20%为验证数据,最后10%为测试模型数据。对数据去噪平滑后,再对各参数进行数据归一化,将不同量级的特征参数统一到( - 1,1) 区间内,使得构建模型的预测准确率更高。
2.2 实验环境
实验采用的计算机配置如下:硬件配置为Intel Core i7 8550U 处理器,Crucial DDR4 32G 内存,Nvidia GeForce MX150 图形加速卡;软件配置为Windows系统,Python 3.9,TensorFlow 2.3。
2.3 LSTM配置
按照表2设置LSTM的输入、输出参数。网络有1个输入层、3 个隐藏层,1 个输出层。学习率设置为0.001,sigmoid 用作激活函数来训练网络模型。将网络训练100次迭代,批大小设置为20。
2.4 结果对比分析
将LSTM 的参数预测性能与经典的参数预测算法反向传播神经网络(Back Propagation Neural Networks,BPNN)、支持向量机(Support Vector Machine,SVM)进行对比分析。BPNN 包括1 个输入层、3 个隐藏层和1 个输出层,模型学习率为0.001,迭代次数为100;SVM 选择径向基核函数,初始核参数设置为0.001。计算3 种方法预测值与实际值的均方误差(MSE)和平均绝对误差(MAE)性能指标,结果如图5、6所示。
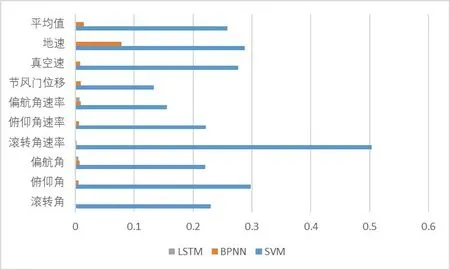
图5 预测指标MSE对比图Fig.5 Comparison chart of prediction index MSE
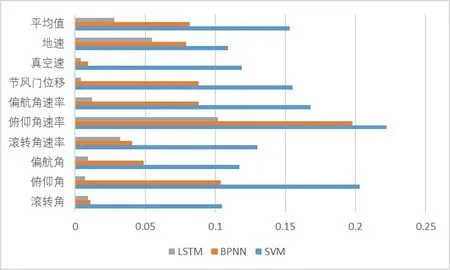
图6 预测指标MAE对比图Fig.6 Comparison chart of prediction index MAE
从图5、6 中可以看出,LSTM 的预测性能指标MSE和MAE都低于BPNN、SVM,MSE平均值分别低0.01 和0.26,MAE 平均值分别低0.05 和0.12,这说明LSTM 在处理具有时间序列特性的飞参数据时,具有较好的预测性能。
3 结论
针对无人机飞控系统状态参数监控问题,首先,建立了问题模型,针对飞控系统的主要组成传感器和执行机构,结合飞行控制律,确定了监控输入、输出参数。然后,构建了基于LSTM的飞控系统状态监控模型,利用无人机历史飞行数据训练模型,利用训练好的模型预测状态参数值,通过预测值与实测值之间的对比实现状态监控。通过实验得出2个结论:
1)LSTM 监控模型能够有效建立飞参数据与飞控系统状态参数的回归映射关系,实现飞控系统状态参数的监控;
2)LSTM 能将飞行数据之间的时序关系融入模型中,使得预测精度比BPNN和SVM高。实验验证了LSTM在无人机状态监测中的有效性和准确性。下一步将重点研究LSTM模型的改进及参数优化,进一步提高飞行系统状态监控质量。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
南京工程学院学报(自然科学版)(2022年2期)2022-08-16
土木建筑与环境工程(2022年4期)2022-05-14
农业工程(2021年6期)2021-07-29
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
实验流体力学(2018年6期)2018-02-13
铁道通信信号(2016年10期)2016-06-01
导航定位与授时(2014年2期)2014-04-27
