小型多功能割草机设计
2022-11-25 07:57位凯玲
沿海企业与科技 2022年5期
卜 匀,位凯玲,赵 鹏
草坪及一定面积草场的定期保养及修整,既是绿化美化环境的重要方法之一,也是减少草坪及草场病虫害的有效措施之一。草坪修剪工作量大,工作环境差,基于此,设计一款高效、环保、节能的多功能割草机设备尤为必要。
引 言
割草机是完成除草、剪草、修剪草坪植被等任务的主要机械工具之一。近几年,国内割草机研究发展突出表现在高效和节能方面,手推操作方式向自动控制方向发展,石油驱动向电能和太阳能等新型驱动能源发展。例如,江苏科技大学研制的一款割草机,在作业过程中不仅可以定幅割草,而且可以实现零转弯半径,改变工作幅度,完成不同空间的割草要求,使割草效率大幅度提高。上海保罗公司研发的太阳能割草机,具备高精度的图像识别能力,自动避障,配备智能化控制系统、自主充电系统及自主导航定位系统,节约能源提高效率的同时,极大降低对草坪工作环境要求。山东科技大学设计的割草机器人,以模拟机器人作为机体的框架,电脑控制割草机行动,按照特定的轨迹割草,实现自动避障,操作简单方便。四川水利学院多次实验研究割草机的自主定位功能①陈万金,赵春花.智能割草机的关键技术讨论[J].湖南农机,2013(7):156-157。。德州学院研究太阳能电池板供电割草机,自然环境中把太阳光通过多个环节转变成太阳能,通过光电效应,转变成智能割草机所需的电能,为割草机提供清洁能源②谢忠华.基于视觉导航的割草机器人运动控制[J].农业工程,2016.6(5):30-32。。国外智能割草机发展较快,例如:本田在美国推广的一款智能割草机器人Mimo,用户购买特定的感应线,安装在院子的边缘,应用定位技术实现限定工作范围内的割草③朱丽娟.谈园林机械中割草机的使用与保养[J].科技与企业,2013(19):298。。笔者设计的小型割草机具有多种功能:自动控制行走功能,避障安全;旋转刀片完成割草功能;不同形状刀片替换,完成草坪花式造型;自动调整割刀刀杆伸出高度,得到不同草杆高度草坪;集草功能,集草箱使草屑即割即收,不会污染草场,经压缩成型,方便清理;石块杂物收集功能,保护刀具的同时清理草坪隐藏杂物;洒水功能,除尘防止污染。
一、总体设计方案
小型多功能割草机可用于家庭庭院、学校草地、公园草坪、小型草场及高尔夫球场等场所。总体设计方案包括:割草机传感器件设计、割草机械本体设计及控制系统设计三部分④陈辰,顾菁.割草机飞甩物危险性试验[J].电动工具,2011(1):14-17。。割草机采用蓄电池组,经相应的调压电路,分别给割草机械本体部分和控制系统供电。割草机以单片机为核心控制系统,通过传感器,感知系统采集外部环境参数信号,将采集的信号发送给控制系统,控制系统据此控制割草机机械部分采取相应行动①杜健民.水草收获机械切割输送装置的设计分析[J].农村牧区机械化,1995(2):25-40。。系统框图如图1所示。
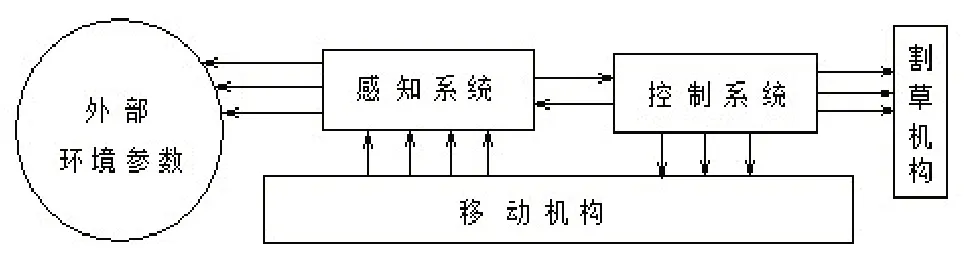
图1 割草机的系统构成框图
二、传感器件设计
工作过程中,割草机如遇障碍物,则可能损伤刀盘,如遇人,高速旋转的刀片可能对人产生极强的危害,因此无论是障碍物还是人,为了安全都应规避。割草机在行进过程中,需要不断采集周围信息,据此规划自身运动路径。综上要求,笔者选用包括测量距离、位置传感器,检测范围为40mm~3m,达到绕开障碍物行驶,实现避障的目的;采用保障人身安全的颜色传感器,根据颜色传感器反馈给控制系统的信号,来判断是否需要转向。
三、割草机机械本体设计
割草机机械本体设计包括:割草机行进机构,割草机构,集草机构以及其他结构部分设计等。综合考虑稳定性及柔性,割草机采用四轮差动驱动,利用蓄电池给割草机驱动电机供电,驱动电机输出端通过锥齿轮传动实现后轮轴转动。为实现后轮转弯功能,割草机后轮左右轮轴与差速器相连,驱动后轮转动准确控制割草机行进方向;两步进电机分别控制前轮,实现前轮转弯。割草机构,割草电机的轴伸端通过联轴器与刀具连接,带动割草刀片旋转,实现割草功能;割草机构整体位于丝杠升降机构上,调整割草机构垂直方向位置,实现刀片距地面不同高度距离的调整要求,从而满足割草后达到草茎高度不同的美化要求。集草机构中设置负压集草箱,割草同时收集切割下的草屑,清洁环境,防止二次污染。其他结构部分,喷水装置于割草前进行降尘处理,石块清理挡板用于梳理小型石块等异物保护刀具,设置隐藏式人工推杆方便不工作时人力推行割草机。割草机外观如图2所示,功能组成如图3所示。
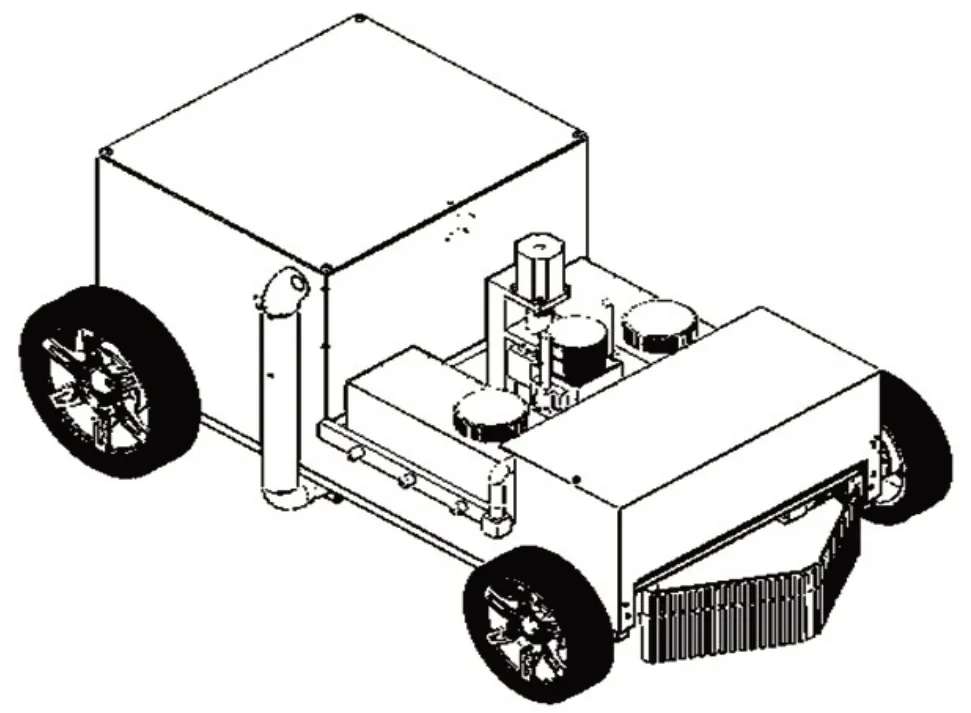
图2 割草机三维整体示意图
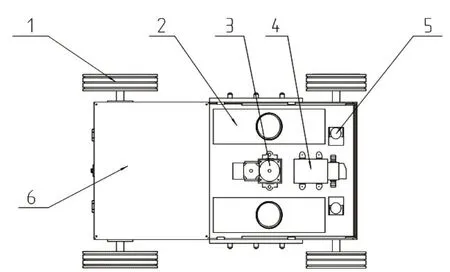
图3 割草机整体示意图
结构设计主要技术参数如下:总体尺寸为600mmx 550mmx 400mm;质量:80kg左右;刀盘直径:460mm;修剪后的草坪高度:20mm~40mm。
(一)割草机行进机构
割草机行进机构部分如图4所示。
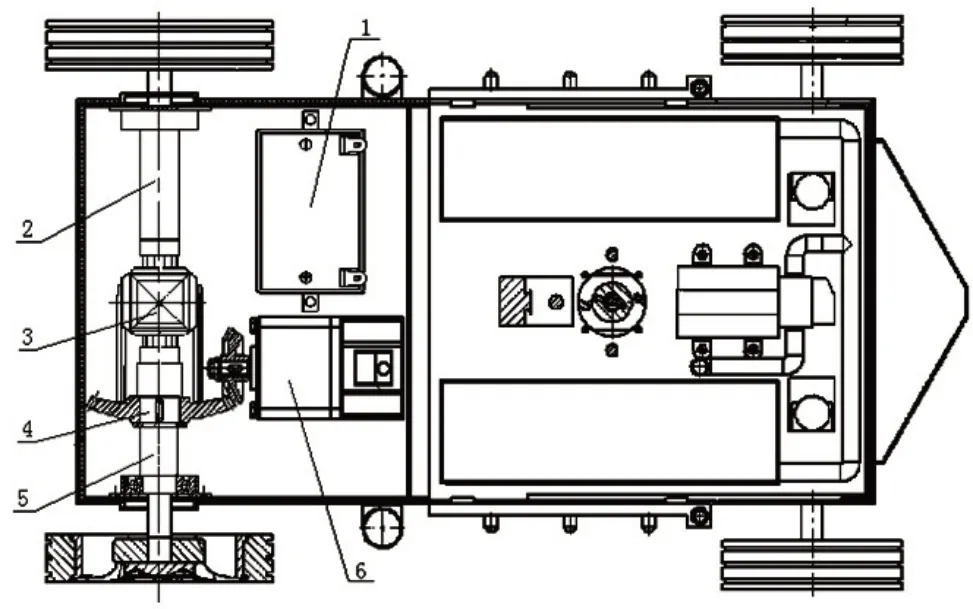
图4 割草机行进机构部分剖视图
1.驱动电机设计
割草机质量,驱动轮直径及行驶速度决定了驱动电机的规格。
其中:k—安全系数;v—行驶速度;η—传动效率;M—驱动轴力矩;
计算得电机功率约400W,输出电压24V,结合市场上的电机型号,选择Z5BLD400-24GU-30S,并配合XY-15AS电机调速器进行调速至1500r/min。
步进电机能够更好地实现前轮转弯控制。考虑转弯所需扭力及割草机内部空间,根据电机所需的静态电流,选取57BYG02型步进电机。
2.大小锥齿轮计算
电机输出转速经过一对锥齿轮传动带动轴转动。首先按照齿面接触疲劳强度来设计锥齿轮,得到小锥齿轮平均分度圆直径和大端的模数。其次按照齿根弯曲疲劳强度设计,得到模数。计算结果比较可得,齿根弯曲疲劳强度计算得到的模数较大,由于锥齿轮齿根的弯曲强度主要由锥齿轮的模数来决定,齿面接触疲劳强度与齿轮的直径有关,故应保留由齿根弯曲疲劳强度所计算出的结果,即m=1.03,圆整为1。
按照接触疲劳强度计算公式可得小齿轮齿数,进一步计算其几何尺寸,最终验算传动比误差:Δi==0.000754,Δi/i=0.47%<1%,故锥齿轮的传动比误差合理。
3.差速器设计
割草机在转弯时左右后轮会产生不同步问题,设计选用普通锥齿轮式差速器结构,主要由半轴齿轮、行星轮架、行星齿轮等三大部分组成。割草机直行时左右轮和行星轮架的转速相等,处于平衡状态,当割草机要转弯时两个驱动轮会产生两个附加作用力,且两个力方向相反,两侧车轮的转速不同,破坏平衡状态,不同的转速反应到相应的半轴齿轮上,行星轮开始自转,外侧车轮转速变高,内侧车轮转速降低,左右两轴以不同角速度转动。
(1)差速器锥齿轮基本参数选择
设计采用3个行星轮,如图4中第3部分差速器所示。圆锥行星轮球面半径Rb:Rb=KBT3,式中:KB—行星齿轮球面半径系数;T—转矩;经计算圆整得,Rb=34mm。
计算半轴齿轮与行星齿轮齿数:齿轮要求高强度,行星轮的齿数应尽可能减少,通常不少于10个,半轴齿轮的齿数Z2通常为10~25个,半轴齿轮与行星轮齿数比Z2/Z1约为1.5~2,取Z1=12,Z2=18。
在圆锥行星齿轮式差速器中,两个半轴齿轮与差速器的各个行星轮同时啮合,确定半轴齿轮齿数时,两半轴齿轮的齿数Z2R,Z2L之和应能被行星轮齿数总和整除,否则差速器不能安装。
即应满足:(Z2R+Z2L)/n=i
式中:Z2L—左半轴齿轮齿数;Z2R—右半轴齿轮齿数;i—任意的整数;n—行星轮数;取Z2L=Z2R=18,符合条件。
(2)半轴齿轮节圆直径和差速器圆锥齿轮模数确定
初步计算半轴齿轮节锥角γ1与行星齿轮节锥角γ2:

初步计算圆锥齿轮大端的模数m:

取标准模数3,节圆直径d1=d2=54mm。
(3)压力角α的确定
齿轮差速器的压力角通常采用22.5°。
4.后轮左(右)轮轴设计
左轴设计,轴段为花键轴,需将最小值减小7%作为花键轴的小径。
根据轴的结构图,得到左轮轴受力计算见图5。
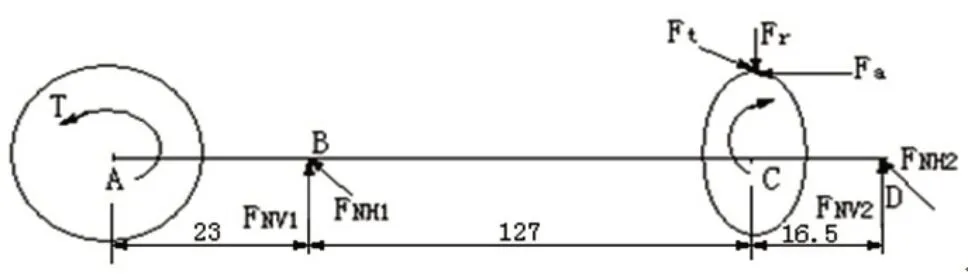
图5 左轮轴受力简图
水平方向受力分析,得到平衡方程:
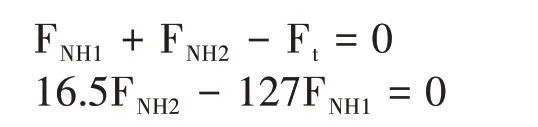
解联立方程,求得水平弯矩MH=FL。
垂直方向受力分析,得到平衡方程:

解联立方程,求得垂直弯矩MV。
结合图5知截面C为危险截面,按弯扭合成应力对危险截面进行强度校核。
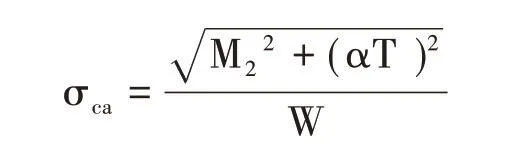
轴的材料为40Cr,查表得[σ-1]=70MPa,即σca<[σ-1],因此左轮轴安全。
右轴设计与左轴同理,估算轴的直径。根据轴的结构图,可以得到右轮轴的计算简图,做水平方向受力分析及垂直方向受力分析。计算轮轴上载荷。按照弯扭合成应力校核后轮轴的危险截面强度,后轮轮轴材料选用40 Cr,进行表面淬火与调质处理。计算应力σca<[σ-1],后轮轴安全。
5.车轮设计
割草机直行时两个驱动后轮与地面主要产生滚动摩擦,启动只需克服驱动轮与地面的静摩擦,但制动过程驱动轮受力比较复杂,轮子的设计应以驱动轮制动情况为计算依据。制动过程中车轮受力方程式为:

式中:Fw—惯性力,Fj—牵引力,Ff—滚动阻力,Fi—坡道的阻力,Fb—车轮与地面的制动力。
(二)割草机构
1.割草电机设计
根据结构设计主要技术参数,割草机的质量、驱动轮的直径、行驶速度决定了驱动电机的规格。最大滚动阻力偶矩Mmax与支撑面正压力的大小Fz成正比关系。即:Mmax=CFz=〔3~10〕Fz,C—滚动摩擦系数(mm)。
负载转矩:TL=〔0.3~0.5〕Tsmax;TL=Mmax,Tsma—直流电动机的最大静转矩。
依据割草机的行业标准,割草机的电机输出功率不低于800W,并且额定转速大于等于2800r/min,查表选直流电动机Z2-11。直流电机功率计算如下:割草机割草工作中消耗的总功率Pw包括割草消耗的功率Pg及空转的功率Pk。
即:Pw=Pg+Pk

直流电机的空转功率Pk的大小与刀具安装切割运动具有一定的关系。电机的输出功率为:Po=Pw/η,经验算小于0.8kW。
故选择输出功率0.8kW的直流电机Z2-11,割草机工作中消耗的总功率满足使用要求。
2.割草刀具
因作业环境内草茎较软,选用条形旋刀式刀具。将刀片刃口平面的另一侧制成向上翘起的风扇叶片形,刀片外形如混流式风机的叶轮,在剪草时刀片高速旋转产生轴向气流,将草茎吸起直立,从而避免因草茎倒伏而产生漏割的情况。刀具的头部由承载刀盘和紧固螺钉将刀具固定在电机轴上,更换简单,操作便利。刀具经热处理工艺处理,硬度、耐磨性、锋利程度和寿命等性能大大提高。刀具安装时保证两端力矩平衡,有效减少噪音。结构如图6所示。
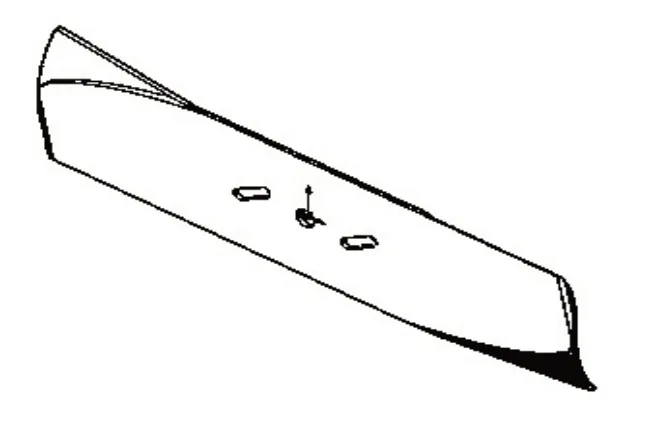
图6 条形刀具图
3.刀具升降机构设计
常见类植物的修剪高度[3]大致在2~6cm之间,草类植物的生长高度大约为5~10cm,因此确定割草机的刀具最低应距地面2cm,刀具升降范围在0~4cm之间。
升降机构采用丝杆滑台与电机相配合的方案,将电机和丝杆滑台的螺母座相连,通过步进电机控制丝杆的转动,实现刀具升降。在电机支撑座两侧设有导向装置,两侧的导向杆与丝杆呈三角形配置,该装置在起到导向作用的同时防止丝杆滑台两侧受力不均而导致刀具倾斜,提升机构的稳定性,保证割草机的正常作业。选用FM5756SFD04型号步进电机,升降机构可调精度达到0.05mm,垂直负载为10kg,垂直满载速度为85mm/s,使用寿命为20000km。该机构结构如图7所示。
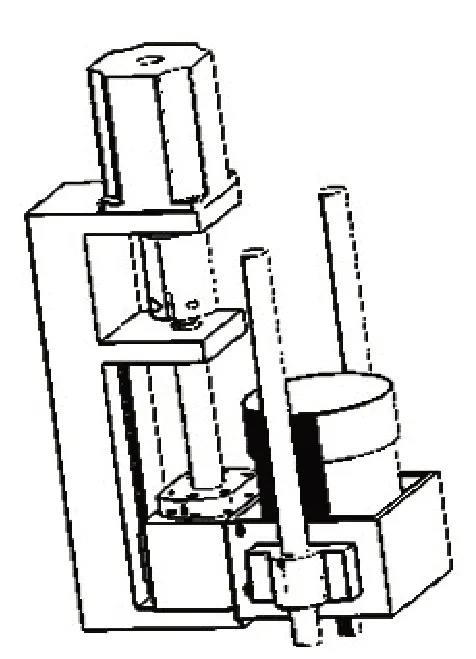
图7 刀具升降机构图
(三)集草机构设计
为保证修剪后的草坪整洁美观,防止草屑的二次污染,割草机加入集草机构。集草机构单独增设电机,利用高转速电机产生的风,将草屑吸入草箱。集草箱底部采用倾斜设计,后部设有小门,当集草箱中草满以后,只需将小门打开,即可将其中的草屑放出。具体展示如图8(a)、(b)所示。
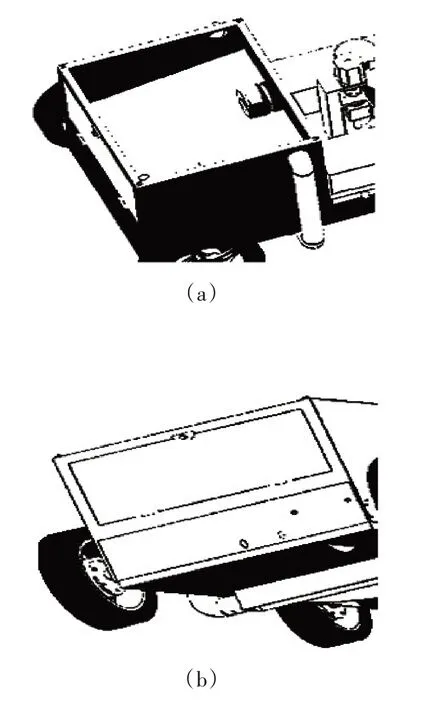
图8 集草装置图
(四)其他部分设计
1.割草机推杆设计
割草机不工作时,为方便行走设计推杆。割草机应能满足不同身高的工作人员来进行操控。根据文献①童时中.人机工程设计与应用手册[M].北京:中国标准出版社,2007:106-108。设计高度可调的推手,只需按动推手按钮,对推手施加轻微推力,可随意调节所需高度。
2.石块清理器件设计
考虑工作时避免受到草坪中暗藏的小石块等硬物的影响,有效保护刀具,避免蹦刃,同时为维护草坪的美观,笔者设计石块清理装置。如图9所示。
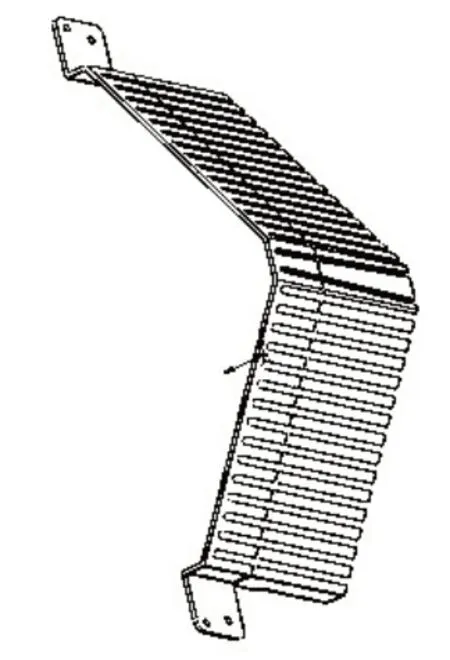
图9 石块清理装置
3.灰尘消除装置设计
减低污染,加入除尘机构。利用电机泵水,将水加压后输送到喷头,形成喷雾,完成除尘。并且在一定程度上起到了灌溉作用。结构如图10、图11所示。
图10 泵水装置图

图11 喷头
5割草机控制系统设计
割草机为户外运动型机器,应保证运动控制效率高、成本低。割草机控制系统应该具备:足够运算能力;在较短时间内响应驱动电机的信号以及传感器采集信号;成本低,稳定性较好;控制驱动电机的启动与停止;对传感信号进行分析处理;依据采集信息对割草机进行运动控制。
总体结构设计:整个系统包括单片机最小系统模块、电机驱动模块、蓝牙模块、红外循迹模块、超声波壁障模块、光感模块、红外遥控模块、体感、声感模块以及电源、小车车体。控制系统框图如图12所示。
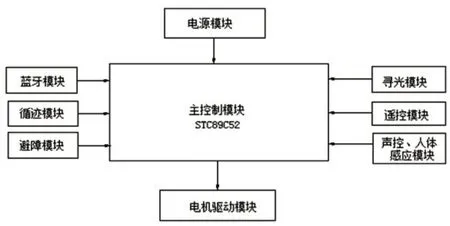
图12 控制系统结构框图
实现功能:利用手机控制小车包括手动控制行走及重力感应两种模式;利用红外循迹可循黑线行走;超声波壁障模式,小车可自动躲避障碍物行走;利用红外遥控控制小车;寻光行走;可感应人体、感应声音。
1.小车硬件设计
(1)L298N芯片
L298N是一个内部有两个H桥的驱动芯片,电机运转只需要三个信号控制:两个方向信号和一个使能信号。L298N芯片的工作电压需要两路。输出供给电机回路的工作电源12v输出;输入逻辑控制回路电源5v。
(2)ATK-HC05蓝牙模块
一款高性能主从一体蓝牙串口模块,可以同各种带蓝牙功能的电脑、蓝牙主机、手机、PDA、PSP等智能终端配对。通过RXD引脚与TXD引脚与单片机进行通信,从而控制各个IO口。
(3)超声波避障模块
基本工作原理:
1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
2)模块自动发送8个40khz的方波,自动检测是否有信号返回。
3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间×声速(340m/s))/2。
(4)红外循迹模块
基本循迹原理:利用红外线对于不同颜色具有不同反射性质的特点。小车行驶过程中传感器的红外发射二极管不断发射红外光,当红外光遇到白色地面时发生漫反射,红外对管接收管接收反射光。如果遇到黑线则红外光被吸收,则红外管接收不到信号,故可通过相应引脚的高低电平来判断是否检测到黑线。
(5)寻光模块
光源引导小车的基本原理:利用感光元件(光电池)实现小车所处环境光线强度的检测。当光线强度增加时,光电池的输出电压升高;当光线强度减弱时,光电池的输出电压降低。在光导小车的设计中,为实现小车位置与光源位置的判别,可以在小车车头的左右两侧分别安装一个光电池进行光线的检测。
(6)红外无线遥控模块
基本原理:红外遥控系统由发射装置和接收装置两大部分组成。按下遥控器的某一个键,遥控器会发出一连串经过调制后的信号,信号经过红外一体化模块接收后,输出解调后的数字脉冲,每个按键对应不同的脉冲,故识别出不同的脉冲就能识别出不同的按键。
(7)HC-SR501体感模块、声感模块
HC-SR501是基于红外线技术的自动控制模块,该模块采用双元探头,当人体从左至右经过时,红外光谱到达双元探头的时间、距离有差值,差值越大,感应越灵敏,当存在差值时,该模块的信号输出引脚输出高电平。
声感模块有A0和D0两个输出,该模块通过检测信号输出引脚。
2.小车软件设计
分别对各个模块进行编程、调试,最后进行了程序的多头文件形式的整合,利用这种形式进行模块化,方便程序的调用与移植。主函数运用switch case语句,通过手机发送不同字节,方便选择小车的各种模式。
五、总结
割草机采用电机作为动力源,采用旋转刀片式切割,作业中受力均匀,工作平稳,草坪的切口更整齐。割草机增加可充电式蓄电池,使用更加方便。割草机可采取自动和手推前进,推手高度可调,应用广泛。割草机内部增设调高机构,设计完成对割草机刀具部分调高,以适应草坪不同高度要求的修整。割草机增设集草箱,除尘装置避免割草后草坪的杂乱及扬尘,该集草箱在装满以后可以拉动手柄,进行卸料,便捷卫生。割草机前端的石块收集机构,既避免刀片的损伤,也保护草坪的卫生与美观。割草机污染低、噪音小、节省人力、安全可控。
猜你喜欢
橡塑技术与装备(2022年6期)2022-06-02
民间故事选刊·上(2022年4期)2022-04-17
民间故事选刊(2022年7期)2022-04-15
装备制造技术(2021年4期)2021-08-05
——对2018年广州市一道中考题的研究
中学数学研究(广东)(2021年6期)2021-04-20
时代文学·上半月(2019年6期)2019-12-13
环球时报(2019-06-11)2019-06-11
山东冶金(2018年5期)2018-11-22
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年6期)2016-11-07