
小型多桨倾转机翼飞行器倾转过渡特性风洞试验研究
2023-04-11 01:29刘纪福马东林
直升机技术 2023年1期
刘纪福,马东林,罗 骏
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
多桨倾转机翼飞行器综合利用分布式旋翼与倾转机翼概念,气动布局采用倾转机翼布局,多个分布式电驱动的旋翼单元分布于前后机翼。该构型兼顾直升机垂直起降、定点悬停与固定翼高速前飞能力,飞行速度和作战半径相对常规直升机可提高一倍以上,是未来高速新构型旋翼飞行器的重要发展方向之一。美国NASA、波音,法国空客等研究机构已经开始提前布局和占位,针对该构型飞行器开展了气动、飞行力学、试验等方面的大量预先研究工作[1-5],并研制了LEAPTech、SCEPTOR、GL-10、Vahana等多型技术验证机,陆续取得了重大阶段性突破。
多桨倾转机翼飞行器具有独特飞行优势的同时也带来很多技术难点。其飞行模式多,具有直升机模式、倾转过渡模式、固定翼模式,其中的倾转过渡模式,气动干扰尤为复杂,存在旋翼/机翼、机翼/机翼、旋翼/旋翼等气动干扰问题,飞行动力学建模困难。采用缩比样机开展风洞试验,获取相关试验数据,反馈修正飞行动力学模型,对提高多桨倾转机翼飞行器飞行动力学模型成熟度,降低试飞风险有重要意义。
国外针对多桨倾转机翼构型验证机开展了较多风洞试验研究。2014年,NASA针对GL-10缩比模型验证机,基于兰利12 ft低速风洞开展了风洞试验设计、试验方法研究并进行了风洞试验[5-7]。GL-10于2015年成功完成了从垂直起降到前飞飞行的倾转过渡自由飞试验。2019年,NASA继续在兰利12 ft低速风洞开展了LA-8缩比模型验证机风洞试验[8],获得了该构型过渡状态的相关气动特性及操纵特性。国内对多桨倾转机翼构型飞行器的研究尚属起步阶段,尤其是倾转过渡特性试验研究尚未见报道。
本文针对某小型多桨倾转机翼无人机开展倾转过渡模式不同机翼倾角(0°~90°)、不同舵面操纵、不同油门等状态下的吹风测力试验。根据试验数据分析了倾转过渡模式不同机翼倾角下的操纵特性及控制策略,为多桨倾转机翼构型飞行器总体参数设计及倾转过渡模式操纵策略研究提供了参考。
1 试验方案设计
试验包括整机试验与部件试验。整机试验模型如图1所示,由小型多桨倾转机翼无人机系统与测量系统组成。其中小型多桨倾转机翼无人机采用串列式倾转机翼布局,前后机翼等高,由机翼、机身、倾转机构、端板、短舱、电机、桨、控制系统等组成。前后机翼及机翼上安装桨状态相同,前后机翼前缘短舱上均安装4副电驱动桨。前后机翼各有一套独立倾转机构,可驱动机翼在0°(机翼水平)~90°(机翼垂直)范围倾转。测量系统包括六分量天平与数据采集系统。六分量天平用于测量试验机的三个轴向力与三轴力矩,试验机的主要参数如表1所列。
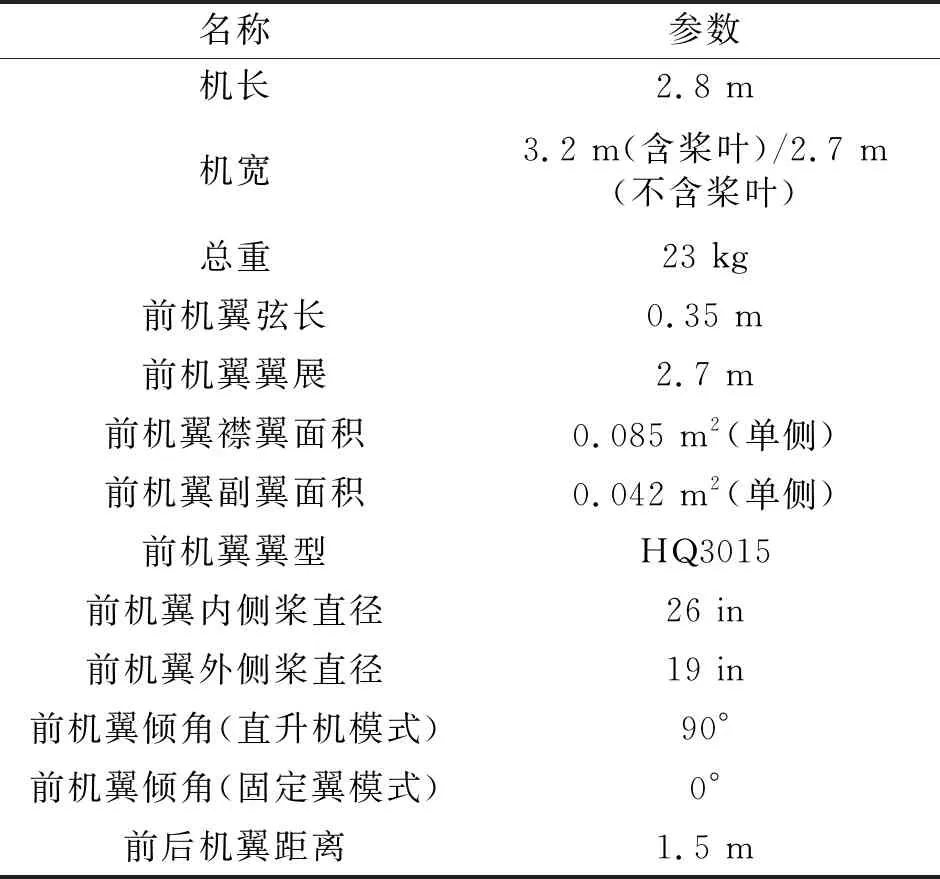
表1 试验机主要参数
部件试验主要包括单独机翼试验(如图2所示)、单独机身试验等。单独机翼试验模型采用整机状态一副机翼(含与机翼安装的短舱、桨等)及陪试件,测量系统与整机试验相同。
试验在中国直升机设计研究所开口直流低速风洞进行,风洞试验段的长宽尺寸为6 m×8 m,最大风速50 m/s。试验过程:由地面操控计算机将控制指令通过数传电台发送到试验机/单独机翼的控制系统,实现对试验机/单独机翼的机翼倾角、舵面角度、桨转速(油门)的控制;试验机姿态(俯仰、偏航)由风洞配套的腹撑机构控制。气动力试验数据由六分量天平测量获得,通过对信号的AD采样、滤波、放大进入数据采集计算机进行处理。

2 试验状态
为了获得多桨倾转机翼飞行器整机倾转过渡模式(无偏航)不同机翼倾角下的俯仰操纵特性,前后机翼气动干扰以及部件(如机翼)气动特性等,主要开展如下研究:
1)单独机翼试验
单独机翼倾转过渡特性试验,获得单独机翼不同倾角下的气动特性及操纵特性,为辅助分析整机倾转过渡特性提供技术支持。
2)整机试验
倾转过渡特性无动力/带动力试验,包括无动力/带动力情况下后机翼襟翼单独操纵试验、前机翼襟翼单独操纵试验、前/后机翼襟翼差动操纵(差动操纵量相同)试验,获得倾转过渡无动力/带动力情况下前后机翼舵面单独操纵及前后机翼舵面差动操纵情况下的全机俯仰操纵特性及气动特性。主要试验状态如表2所示。
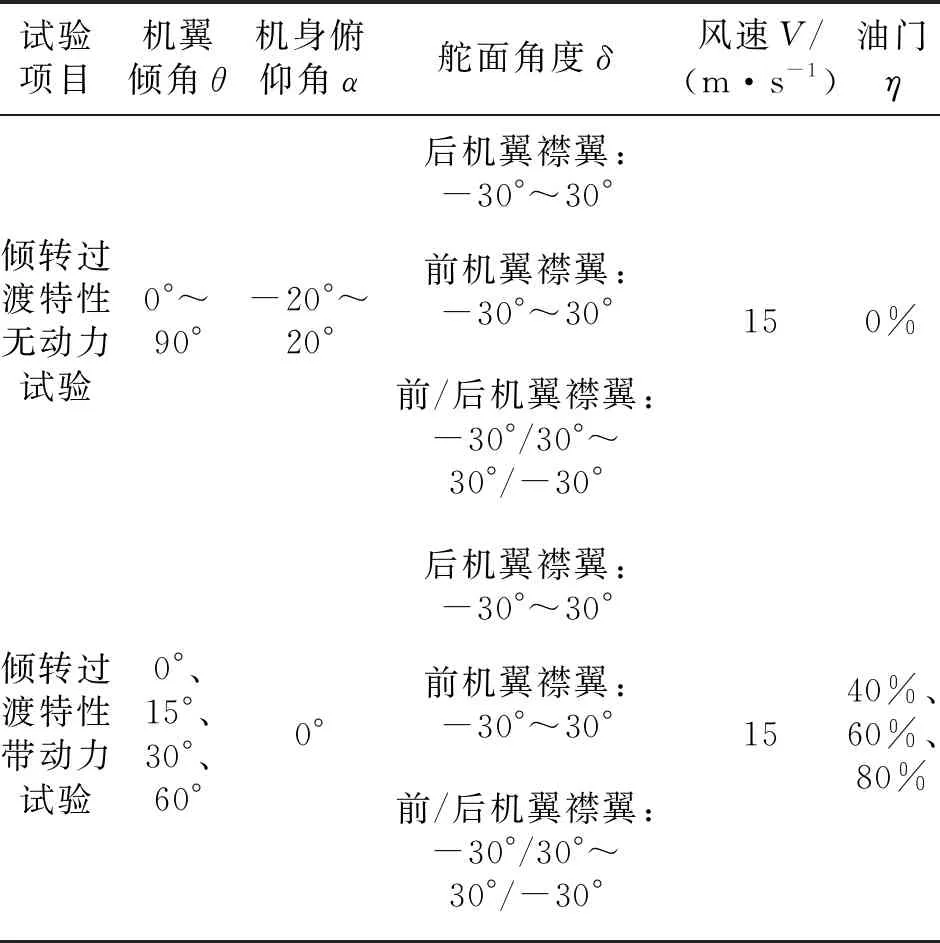
表2 整机试验主要试验状态
3 试验结果与分析
3.1 单独机翼倾转过渡特性试验
机翼倾转约90°是多桨倾转机翼构型飞行器倾转过渡状态的最主要特征。单独机翼无动力倾转过渡(机翼倾角由0°倾转至90°)状态升力、阻力、俯仰特性如图3-图5所示。从试验数据分析可以得出:
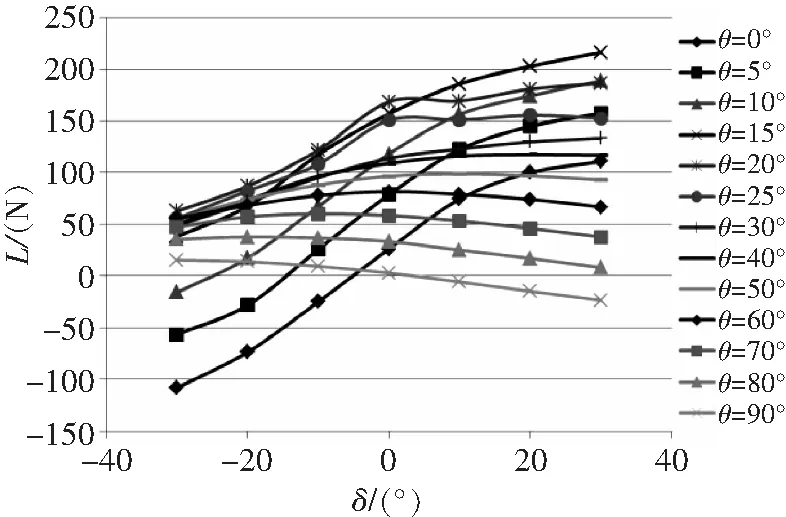
图3 单独机翼不同倾角不同舵角升力
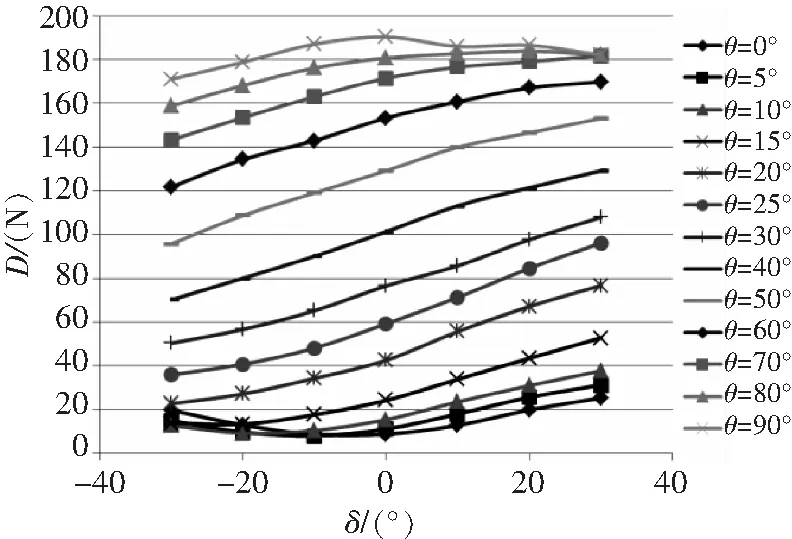
图4 单独机翼不同倾角不同舵角阻力
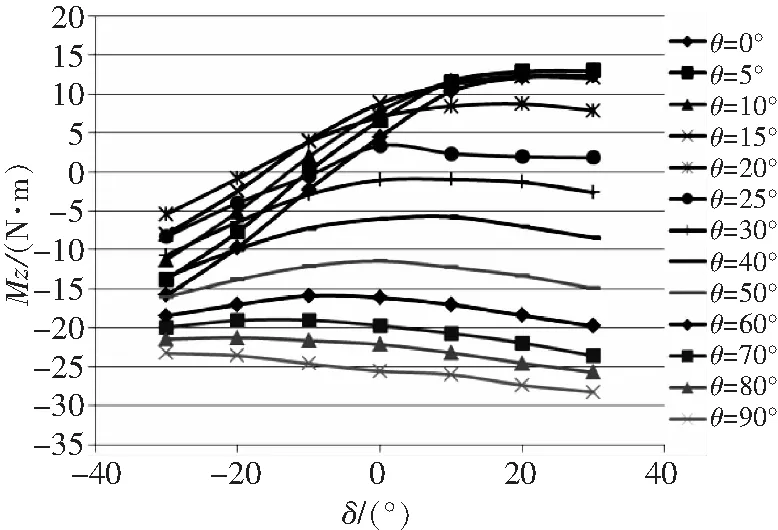
图5 单独机翼不同倾角不同舵角俯仰力矩
1)升力随机翼倾角增加总体呈先增加后减小的趋势,主要是机翼迎角增加到一定范围后机翼开始失速所致;机翼小倾角时升力大致随舵角增加而增加,大倾角(约50°~60°以上)时升力逐渐随舵角增加而减小。
2)阻力总体随着机翼倾角增加而增加。
3)俯仰力矩(低头为正)在较小机翼倾角范围内(≤20°)随舵角增加而增加显著;随着机翼倾角增加,机翼俯仰力矩随舵角增加变化变缓(舵效变差),并逐渐向反舵效转变(舵角增加呈现抬头趋势)。
主要原因是,随着倾角增加,机翼气动力由升力为主导向阻力为主导转变,同时随着机翼倾转气动力合力作用点也在往后(相对机翼前缘)往下(相对机身)移动。
3.2 倾转过渡无动力单独前机翼襟翼操纵
整机倾转过渡无动力单独前机翼襟翼操纵俯仰力矩特性如图6-图8所示(仅示部分机翼倾角)。

图6 θ=0°不同俯仰角前机翼舵面操纵俯仰力矩
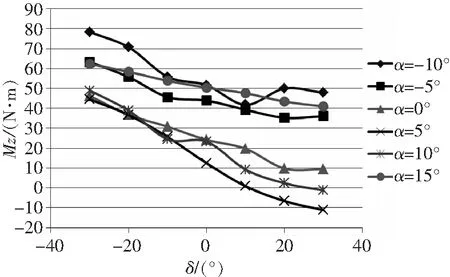
图7 θ=40°不同俯仰角前机翼舵面操纵俯仰力矩
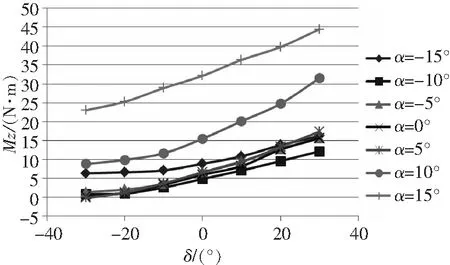
图8 θ=90°不同俯仰角前机翼舵面操纵俯仰力矩
从数据分析可以得出:
1)单独前机翼襟翼操纵机翼倾角由0°至90°变化时,全机俯仰力矩(相对全机重心,低头为正)总体变化趋势为:随着机翼倾角增加,操纵前机翼襟翼,俯仰力矩由正常舵效逐渐转变为反舵效(约在机翼倾角50°左右开始转变),倾转过程中部分区域舵效很差。
2)在机身俯仰角0°附近范围,整机俯仰从可以通过操纵舵面配平到逐渐不能通过舵面操纵配平转变(表现为低头力矩)。
主要原因是,倾转过程前后机翼气动力由升力为主导向阻力为主导转变,同时机翼倾转过程全机重心(机翼重心位于转轴之前)上移且随着机翼倾角增加舵效总体变差。
3.3 单独后机翼襟翼操纵试验
整机倾转过渡无动力单独后机翼襟翼操纵俯仰力矩特性如图9-图11所示(仅示部分机翼倾角)。从数据分析可以得出:
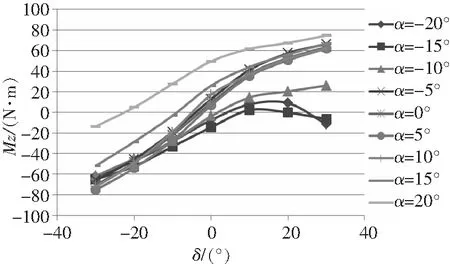
图9 θ=0°不同俯仰角后机翼舵面操纵俯仰力矩

图10 θ=40°不同俯仰角后机翼舵面操纵俯仰力矩
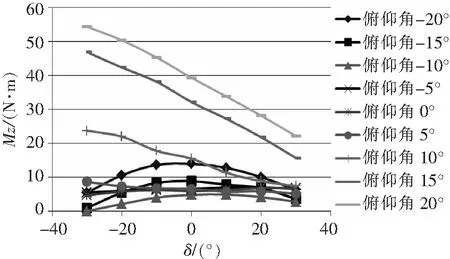
图11 θ=90°不同俯仰角后机翼舵面操纵俯仰力矩
1)单独后机翼襟翼操纵机翼倾角由0°至90°变化时,俯仰力矩总体变化趋势为:随着机翼倾角增加,操纵后机翼襟翼,俯仰力矩由正常舵效逐渐向反舵效转变(约机翼倾角50°左右开始转变,接近90°的大倾角下并不是所有俯仰角下均为反舵效)。这种转变趋势相对稍滞后于单独前机翼舵面操纵,舵效较差区域也更多,主要是前机翼对后机翼干扰所致。
2)在机身俯仰角0°附近范围,整机俯仰从可以通过操纵舵面配平到逐渐不能通过操纵舵面配平转变(表现为低头力矩)。
3.4 倾转过渡无动力前后机翼襟翼差动操纵
整机倾转过渡无动力前后机翼襟翼差动操纵俯仰力矩特性如图12-图14所示(仅示部分机翼倾角,图中横坐标为前机翼襟翼角度)。从数据分析可以得出:
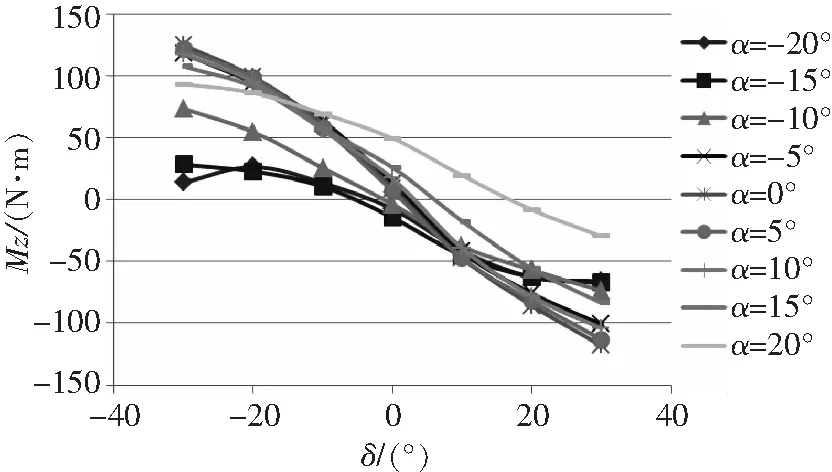
图12 θ=0°不同俯仰角前后机翼舵面差动操纵俯仰力矩

图13 θ=40°不同俯仰角前后机翼舵面差动操纵俯仰力矩
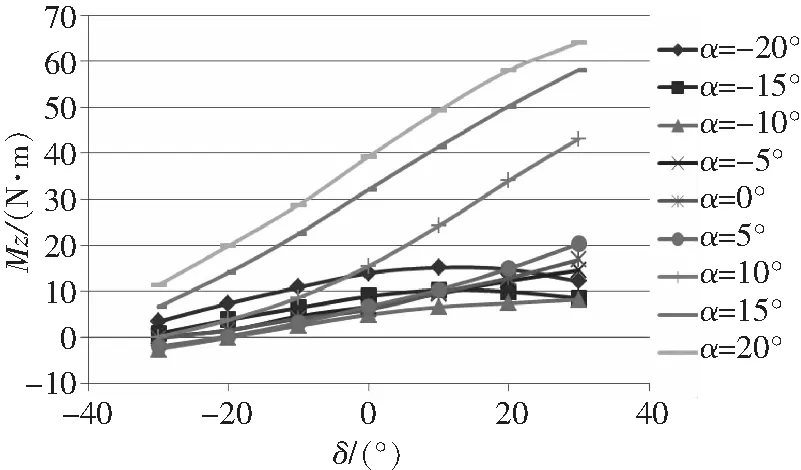
图14 θ=90°不同俯仰角前后机翼舵面差动操纵俯仰力矩
1)前后机翼襟翼差动操纵机翼倾角由0°至90°变化时,俯仰力矩总体变化趋势为:随着机翼倾角增加,前后机翼襟翼差动操纵时,俯仰力矩特性由正常舵效逐渐向反舵效转变(约机翼倾角50°左右开始转变);机翼大倾角下并不是所有俯仰角下均为反舵效,倾转过程较多区域舵效较差。
2)在机身俯仰角0°附近范围,整机俯仰从可以通过操纵舵面配平到逐渐不能通过舵面操纵配平转变(表现为低头力矩)。
3.5 倾转过渡带动力试验
整机倾转过渡带动力前后机翼襟翼差动操纵俯仰力矩特性如图15-图16所示(仅示部分机翼倾角,图中前后机翼襟翼差动操纵时横坐标为前机翼襟翼角度)。从数据分析可以得出:相同机翼倾角下,带动力情况下俯仰力矩较无动力总体增加(更大低头力矩),且变化量大致随机翼倾角增加而增加,油门越大越显著,主要是该构型随机翼倾角增加,前后机翼上桨拉力作用线到重心距离差值增加,且后机翼上桨拉力作用线距离重心更远所致。

图15 θ=0°不同油门不同舵面操纵俯仰力矩
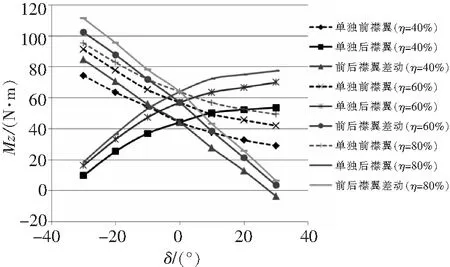
图16 θ=30°不同油门不同舵面操纵俯仰力矩
4 结论
通过分析小型多桨倾转机翼飞行器倾转过渡特性风洞试验可以得出以下结论:
1)机翼倾角由0°(水平)~90°(垂直)变化过程中,通过操纵机翼舵面控制俯仰时,舵效总体由正常舵效逐渐向反舵效转变(大致从50°~60°开始转变)。
2)机翼倾角0°~30°区间,机身水平下俯仰通过前后机翼舵面操纵可配平,该区间倾转过渡时可采用机翼舵面操纵控制。
3)机翼倾角30°~60°区间,俯仰单纯通过机翼舵面操纵控制较困难(部分区域机身俯仰角0°附近范围靠舵面无法配平且舵效较差),该区间倾转过渡时可采用机翼舵面操纵+前后机翼上桨拉力差动操纵控制。
4)机翼倾角60°~90°区间,俯仰通过前后机翼舵面操纵非常困难(较多区域机身俯仰角0°附近范围靠舵面无法配平且舵效较差较复杂),可采用直升机模式前后机翼上桨拉力差动操纵控制。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
民用飞机设计与研究(2020年4期)2021-01-21
学习周报·教与学(2020年25期)2020-10-21
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中学生数理化·中考版(2018年10期)2018-12-07
科学与财富(2018年1期)2018-03-03
理科考试研究·高中(2017年7期)2017-11-04
科技风(2017年21期)2017-05-30
