仿生机器鱼胸尾鳍联动水动力学性能分析
2023-08-04 05:44高鑫驰祁靖媛陈定方
起重运输机械 2023年13期
高鑫驰 梅 杰 祁靖媛 李 波 陈定方
武汉理工大学交通与物流工程学院 武汉 430063
0 引言
人类对于海洋资源探索自古以来从未停止,水下航行器是目前水下探索较为有效的手段之一[1,2]。采用胸尾鳍推进的水下航行器,由于其运动方式以及外形轮廓与鱼类相近,又被称作仿生机器鱼[3]。
与螺旋桨推进方式相比,胸尾鳍联动推进方式具有能量利用率高、噪声小、隐蔽性强的特点[4],近年来被给予越来越多的关注[5]。魏倩芸[6]以箱鲀机器鱼为研究对象,使用CFD 仿真软件,研究胸尾鳍摆动频率、幅度以及相位差对于鱼体水动力学性能的影响;Shen Y等[7]设计了一款三自由度胸鳍的机器鱼,可实现拍打前进、浮潜、转弯,胸鳍在接近10°的仰角处于稳态,顺桨运动可将净推力提高到相对于没有主动顺桨的净推力的7 倍;Chen G W 等[8]设计了一款具备螺旋推进器的机器鱼和一款尾鳍摆动推进的机器鱼,采用实验和仿真分析旋转中心位置对机器鱼模型偏航稳定性的影响,得到旋转中心在鱼体中间的机器鱼受水流影响较小,仿生推进器具有更好的偏航稳定性;Ding J 等[9]设计了一款具有一个臀鳍、一个尾鳍、一对胸鳍的仿生机器鱼,采用仿真和实验分析,探索摆动频率、幅度以及臀鳍尾鳍之间摆动的相位差对于鱼体游动偏航稳定性的影响;Omari M 等[10]设计了一款具备可变形尾鳍,仿真模拟尾鳍摆动频率和幅度对于推进力的影响,得到了不同尾鳍状态的最佳运动参数;同时,与改变特定参数相比,运动参数的同步性对整体推力的影响更大。
目前,研究主要是通过水动力学仿真、实验验证这2 种方式去分析鱼体水动力学性能,通过比较胸尾鳍运动频率、幅度以及两者之间的相位差等因素对该性能的影响,并探索相对合适的运动参数和运动方式。常见的鱼体仿真分析未考虑尾颈尾鳍摆动时鱼体体长不变的特点,使得仿真结果有相对误差。为了克服这一问题,本文在考虑体长不变的基础上,基于胸尾鳍水动力学分析方法确定胸尾鳍优化运动参数,探索胸鳍运动辅助鱼体推进的作用机理。主要内容包括仿生机器鱼系统设计、运动学建模、水动力学仿真分析、鱼体游动实验方案设计及结果分析等4 个部分。
1 仿生机器鱼结构设计
本文以鲹科鱼类作为仿生对象对鱼体进行建模。鲹科鱼类鱼体主要由头部、躯干和尾部组成,其身体运动部位主要为胸鳍和尾鳍,如图1a 所示。通常,假设鱼体截面形状为椭圆形,坐标轴原点设在鱼嘴处,如图1b 所示,鱼体截面椭圆长轴尺寸R(x)、短轴尺寸r(x)是随截面位置尺寸变化而变化,遵循函数规律为
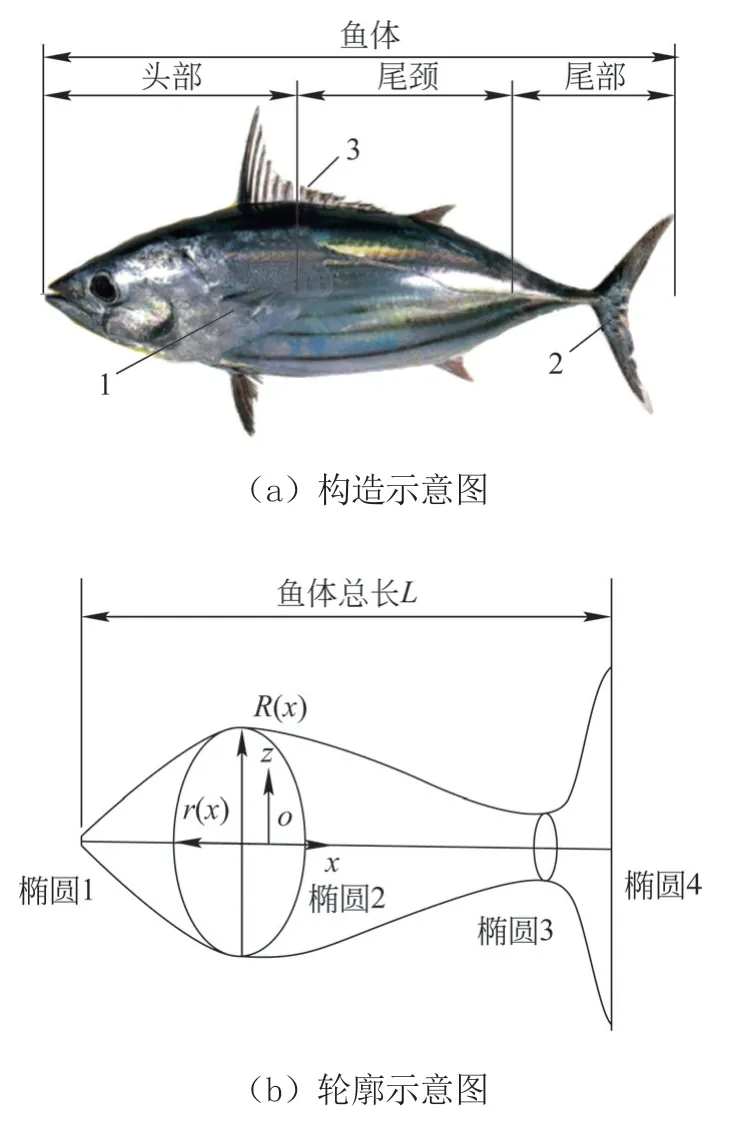
图1 仿生鱼体示意图
式中:R(x)为任意椭圆截面上的长轴,r(x)为椭圆截面短轴。
Ri和ri参数对应4 组与长短轴有关的拟合参数[11],结合长短轴公式及关键截面拟合参数,可描出仿生鱼截面长短轴顶点位置,由顶点位置可以拟合鱼体外形轮廓,关键椭圆截面轮廓拟合参数如表1 所示。

表1 鱼体轮廓拟合参数表
根据鱼体外形轮廓拟合曲线,可绘制仿生鱼体的外形轮廓如图2a 所示,基于胸鳍、尾鳍、背鳍具体结构,构建的仿生机器鱼三维模型结构如图2b 所示,具体包括转动单关节胸鳍机构、四关节尾鳍机构、背鳍、配重及鱼体外壳部分组成。
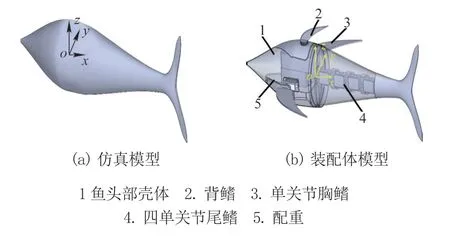
图2 仿生鱼体三维模型
2 仿生机器鱼运动学建模及改进
鱼体运动可以近似地描述为波幅沿身体不断变大的类正弦曲线。鱼体从静止开始运动,波幅逐渐增大至最大幅度值,最终进入稳态游动状态。假设鱼体主要在xoy平面摆动,基于细长体理论,鱼体体干线在xoy平面波动方程[12]为
式中:y(x,t)为鱼体体干线上任意质点摆动位移;x为体干线质点的横坐标;如图3 所示,A点为鱼体尾鳍摆动变形前的尾鳍端点,B点为鱼体体长变化时尾鳍端点,C点为鱼体体长不变时尾鳍端点,A点与C点横坐标均为xw,B点对应横坐标为x′w;c1、c2分别为鱼体一次波、二次波振幅包络系数;l为仿生机器鱼质点到尾鳍端点体干线长度;λ为体干线波动时的波长;k为体干曲线波数,k=2π/λ;T为尾鳍摆动周期;ω为尾鳍摆动频率,ω=2π/T。
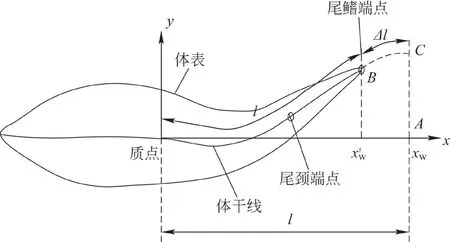
图3 仿生机器鱼鱼体体长变化示意图
鱼体波波动方程描述了尾颈运动规律,尾颈摆动幅度包络值可表示为,c1对原点附近的幅值影响较大,c2主要影响靠近尾鳍末端的幅值。尾鳍末端波动相位滞后于尾颈处波动相位。本文中,c1=0.09,c2=0.01,l=700 mm,λ=1,ω=6π。
细长体理论假设体干线质点在y轴方向上运动,忽略其在x轴方向的运动,导致鱼体摆动过程中体长发生变化,鱼体长度增加量为Δl,图3 中BC段虚线曲线长度。若假定鱼体体长变化,体长相对变化率相对摆动幅值、波长变化趋势图分别如图4 所示。从图中可以看出,波长对体长的影响较小。相对而言,幅值对体长的影响很大。当幅值达到体长的1/4 时,体长的变化率超过了16%,影响仿生机器鱼数值模拟的准确性。因此,需要建立更加精确的运动学模型,描述鱼体的波动运动。
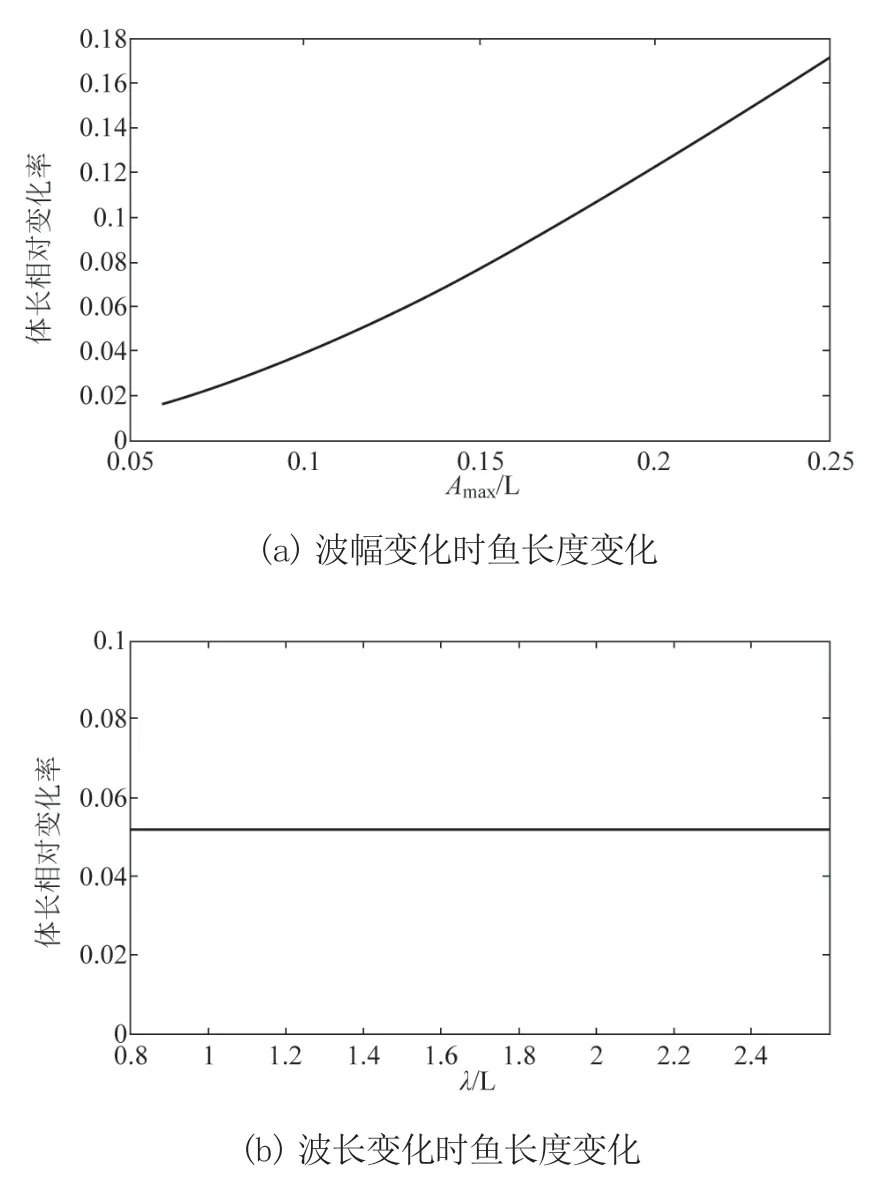
图4 幅值和波长对体长相对变化率的影响
在鱼体运动过程中,体干线上质点横坐标和体长符合弧长积分公式[13]为
基于体长不变原则,鱼体尾鳍体干线上某一点相对鱼体质点长度等于初始水平位置尾鳍体干线上该点对应的横坐标,即为l(x)=x0,代入公式
采用牛顿下山法求解此非线性方程式(5),其作用是基于光滑函数(导函数连续),通过迭代求解f(x)的零点,可得到该时刻下的尾鳍末端点的坐标,求得的坐标绘制成图,如图5 所示。
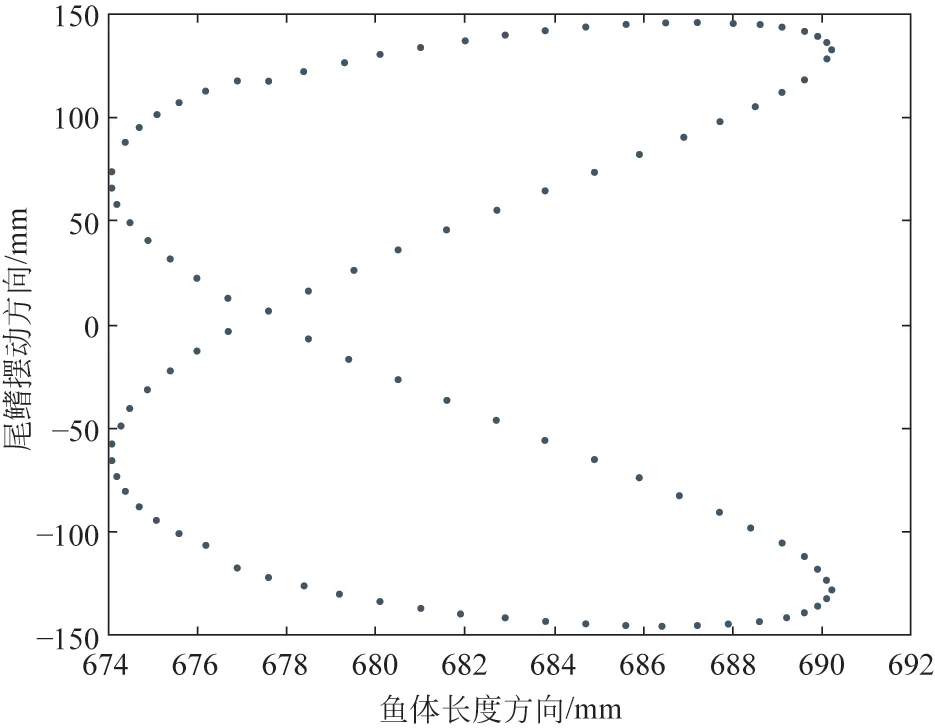
图5 尾鳍末端轨迹
牛顿下山法求零点公式为
在式(6)中,下山因子(在下山法保证函数值稳定下降的前提下,用牛顿法加快收敛速度,需要将牛顿法的结果与前一项的近似值进行适当地加权平均作为新的改进值,需要一个加权比例,即下山因子)应设置在(0,1)范围内,并且当这个因子的数值越小时,式(4)就越容易收敛,但是收敛速度会随着这个数值的减小而减慢。本文经过多次测试,发现当因子取0.5 时,可保证所有的网格节点运动且收敛的速度是较快的。
式中:xk的初始值为x0。
为简化运算用g(x)表示,则首先用加权面积公式求g(x)在0 ~xk的积分。
由式(7)转化为
|xk+1-xk|<ε,其中ε趋近于无穷小为收敛条件,此处ε取10-6。
在摆动过程中,鱼类由于肋骨的存在,体表质点会绕着脊柱关节点旋转。
如图6 所示,建立体干线局部坐标系。C点在坐标系xBByB下的坐标始终为(0,yc0),yc0为未摆动时C点纵坐标。坐标系xBByB相对于坐标系xAAyA旋转了θB并向(AxB,AyB)平移,其中θB为鱼体波曲线在B点的切线与xA轴的夹角,AxB为B点在坐标系xAAyA下的横坐标,则C点在xAAyA下的坐标可表示为
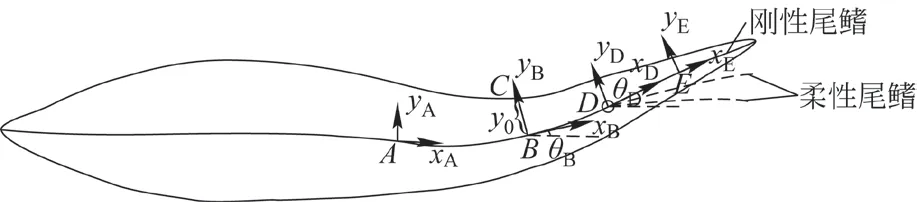
图6 体干线局部坐标系
如图7 所示,每一条曲线代表一个时刻,曲线和曲线上的星号分别表示当前时刻,鱼体长度变化和鱼体长度不变,各点的空间位置,尤其是尾鳍末端。可以看出,改进后的运动学模型相比原模型,在鱼体波动时末端点的横纵坐标均有变化。以此得到仿真时鱼体体干线的变化规律,即改变后的体干线所在水平截面的运动规律,进而得到鱼体整个轮廓的运动规律。
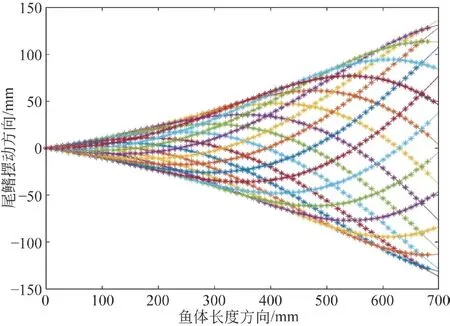
图7 运动学模型改进前后对比图
3 仿生机器鱼水动力学仿真分析
鱼体游动仿真需要使用动网格技术,属于不规则运动,所以使用四面体非结构网格划分流场模型,网格数量为100 万。
3.1 仿生机器鱼游动仿真最佳运动参数选择
在Fluent 软件中设置水力直径、雷诺数、湍流强度、湍动能、湍动能耗散率、湍流粘度比等参数,设置速度入口设置为0.15 m/s,压力出口设置为0 Pa,雷诺数结果>2 000,仿真使用湍流k-εRNG 模型。Fluent 软件中设置参数的结果如下:
水力直径[14]:
3.2 机器鱼不同运动参数仿真
首先保持胸鳍不动,尾鳍摆动频率为2 Hz,研究尾鳍摆动幅度对推进力的影响,得到最优尾鳍摆动幅度A,然后保持胸鳍不动,尾鳍摆动幅度为A,研究尾鳍摆动频率对推进力的影响,得到最优尾鳍摆动频率F;然后保持尾鳍摆动频率为F,摆动幅度为A,胸鳍转动角度为150°,研究胸鳍转动频率对推进力的影响,得到最优胸鳍转动频率f;最后保持尾鳍摆动频率为F,摆动幅度为A,胸鳍转动频率为f,研究胸鳍转动角度对推进力的影响,得到最优胸鳍转动角度α。
从图8 中可以得到最优尾鳍摆动幅度为65 mm,对应的推进力稳定值为1.3 N;从图9 中可以看出鱼体运动趋于平稳后,推进力呈周期性变化,得到最优尾鳍摆动频率为3 Hz 时,推进力稳定值接近2 N,说明尾鳍摆动幅度和频率相互影响不大,可独立分析,此研究方案可行。尾鳍摆动频率为3 Hz 和4 Hz 时,推进力稳定值接近,为2 N,为降低舵机负荷,取3 Hz 为最优尾鳍摆动频率;从图10 中可以得到最优胸鳍转动频率为3 Hz,对应的推进力稳定值为2.3 N;从图11中可以得到最优胸鳍转动角度为90°,对应的推进力稳定值为2.8 N。
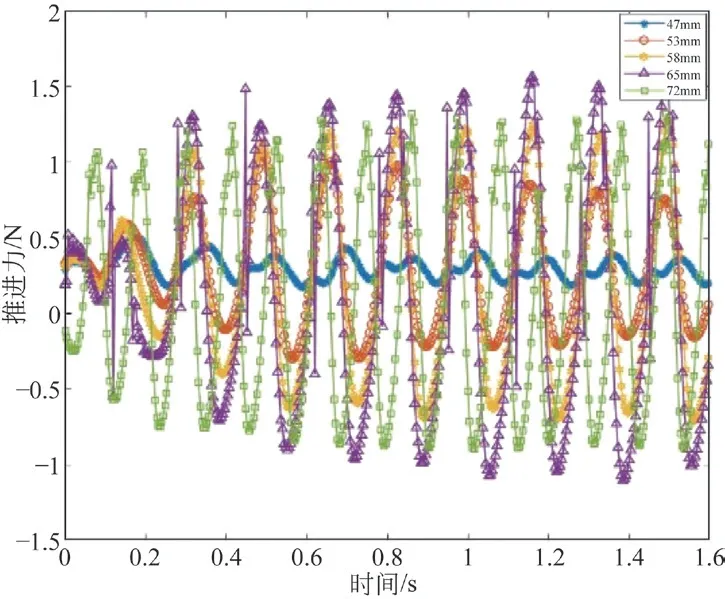
图8 不同尾鳍摆动幅度下推进力随时间变化曲线
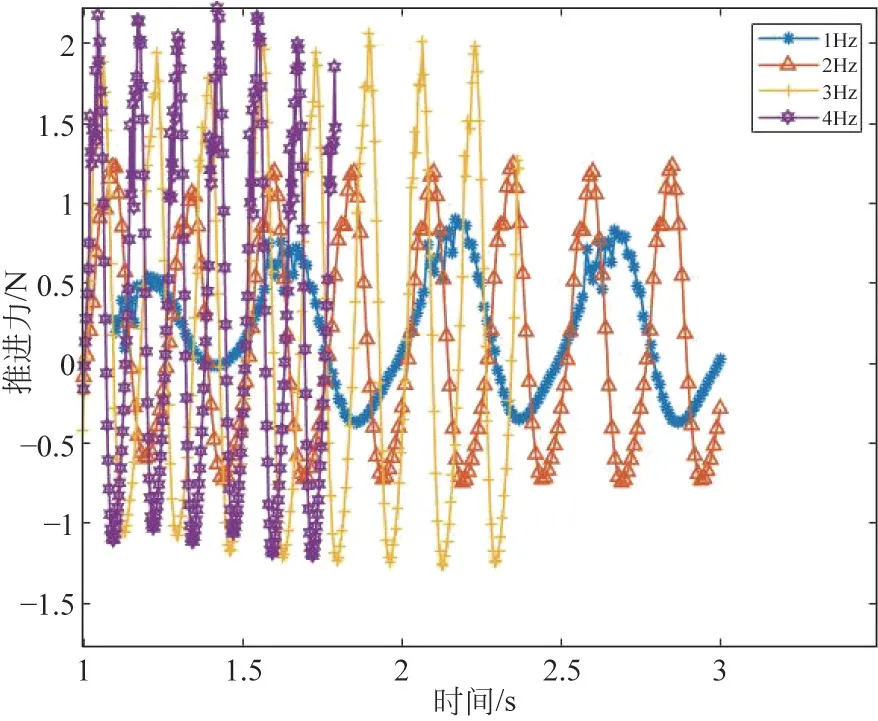
图9 不同尾鳍摆动频率下推进力随时间变化曲线
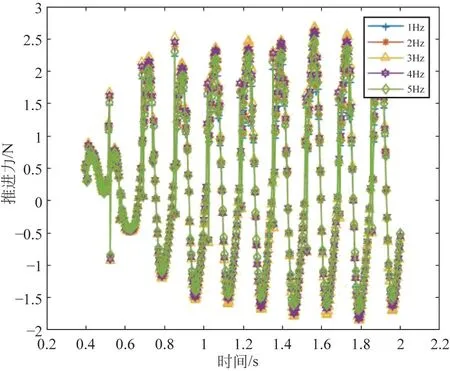
图10 不同胸鳍摆动频率下推进力随时间变化曲线
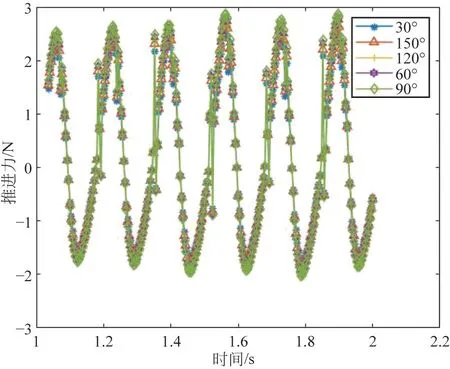
图11 不同胸鳍摆动角度下推进力随时间变化曲线
由以上结果可以得到,胸鳍对鱼体直游有促进作用,且最优运动参数A=72 mm,F=3 Hz,α=90°,f=3 Hz。在最优运动参数下,研究鱼体以及流场应力、流速以及涡的情况。
1/2 个周期内仿生机器鱼的应力变化情况如图12所示。图12a ~图12d 分别对应一个运动周期内T/8、2T/8、3T/8 和4T/8 共4 个时刻。

图12 1/2 个周期内仿生机器鱼的压力变化
由图12 可知,在胸鳍拍动至水平状态时,鱼体表面的应力差最大,此时表压为0 Pa,最大正应力为314 Pa,最大负应力为-945 Pa,并且可见胸鳍中间部位应力大于四周,这是因为中间部位涡流无法脱离,只能被挤向四周;另外,尾鳍拍向的一侧即水被挤压的一侧,该侧应力大于另一侧应力,由此可以看到,涡的产生、发展、脱落、湮灭的过程,涡最明显时,涡中心应力为-361 Pa,并且尾鳍摆动时,挤压侧应力远大于被挤压侧应力。尾鳍附近应力差也大于胸鳍附近的应力差。
1/2 个周期内仿生机器鱼的速度变化情况如图13 所示。图13a ~图13d 分别对应周期内T/8、2T/8、3T/8和4T/8 这4 个时刻。
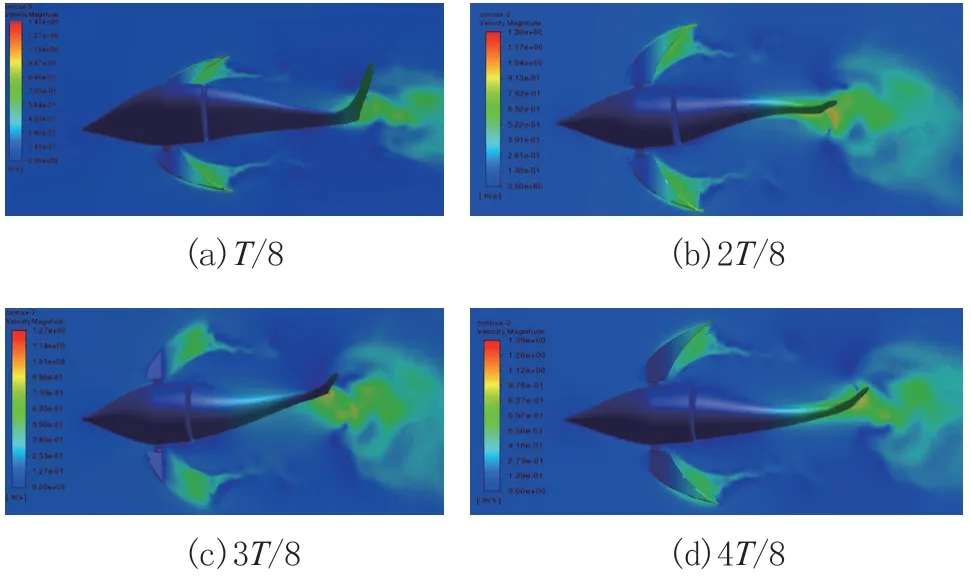
图13 1/2 个周期内仿生机器鱼的速度变化
由图13 可知,在鱼体运动至T/8 时,鱼体附近涡流具有最大速度,而且此区域紧贴鱼体尾鳍,为1.2 m/s,胸鳍后侧和尾鳍后侧处,相比于水中其他区域,水的速度更大;由云图可以看出,尾鳍后端的水会随着鱼的向前游动和尾鳍摆动形成一条较宽的带状水流,而且随着时间的推移,该尺寸会逐渐增大,直至稳定。
1/2 个周期内仿生机器鱼的涡量变化情况如图14所示。图14a、图14b 分别对应一个运动周期内T/8 和4T/8 这2 个时刻。

图14 1/2 个周期内仿生机器鱼的涡量变化
由图14 可知,只有在运动的胸鳍尾鳍后侧才会形成涡流,且胸鳍后侧的涡流呈扇形状,尾鳍后侧的涡流接近半圆状,从T/8 到3T/8 涡流区域有所增大,涡的密度变化不大。
表2 为仿真实验中的应力变化云图、速度变化云图、涡量云图以及力的大小。结合机器鱼实际游动性能可知,具体分析仿真情况,流场中,鱼体游动方向与水流方向相反,所以形成的涡附近的应力值均为负值;胸鳍转动时,可以为鱼体提供额外推进力,所以在该状态下,鱼体游动快速。
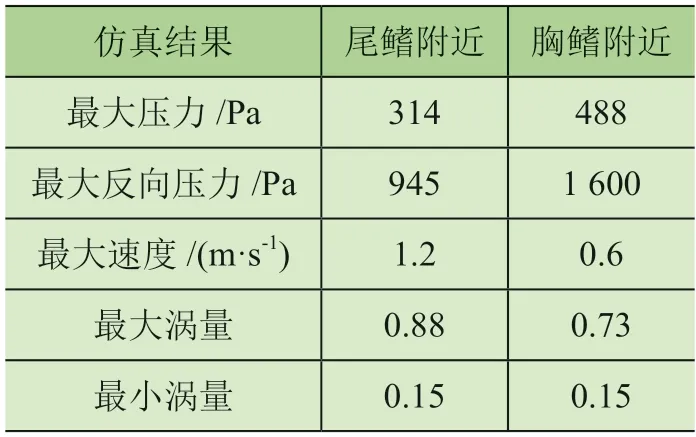
表2 仿真结果
4 实验方案设计与实验结果分析
4.1 实验方案设计
4.1.1 机器鱼实物制作及控制程序编写
3D 打印鱼体外壳、胸尾鳍以及连接件,硅胶浇筑尾颈蒙皮,将舵机、控制板、电池安装在指定的位置,调试鱼体运动,确定无误后连接各个零件,加入配重并测试平衡性,密封并测试气密性。
首先编写运动程序,烧录进控制板;然后将配套Lora 分别连在上位机和控制板上,并且连接好电路中的舵机控制板、稳压模块以及舵机(其中Lora 相比于蓝牙、WiFi 等无线传输方式,可以有一定的水下传输能力);在上位机通过ATK-Lora 发送不同舵机运动指令;与控制板连接的Lora 收到上位机传输来的信号,将该信号传输给控制板,控制板将该信号进行A/D 转换,变成PWM 脉冲通过稳压传输给舵机,进而鱼体可以执行不同方式的运动。鱼体运动控制的流程图如图15 所示。

图15 运动框架图
鱼体的运动包含三自由度尾鳍左右摆动,可为鱼体前进提供推进力;单自由度胸鳍绕旋转轴转动,可辅助胸鳍前进,胸尾鳍的运动姿态如图16 所示。

图16 变速运动实物图
4.1.2 设计实验方案并开展实验
测量鱼体前游推进力的实验原理是通过机器鱼提供拉力拉扯绑在身体上的绳,通过支架上的定滑轮,拉扯0.75 kg 的砝码,因为砝码质量远大于理论计算的拉力,所以砝码不会被拉起,电子秤上示数前后差值即为绳的拉力,当绳子被拉直时,绳子与水面的夹角θ是固定的,则cosθ=0.95,鱼体的推进力进而可以求得,其原理如图17 所示。
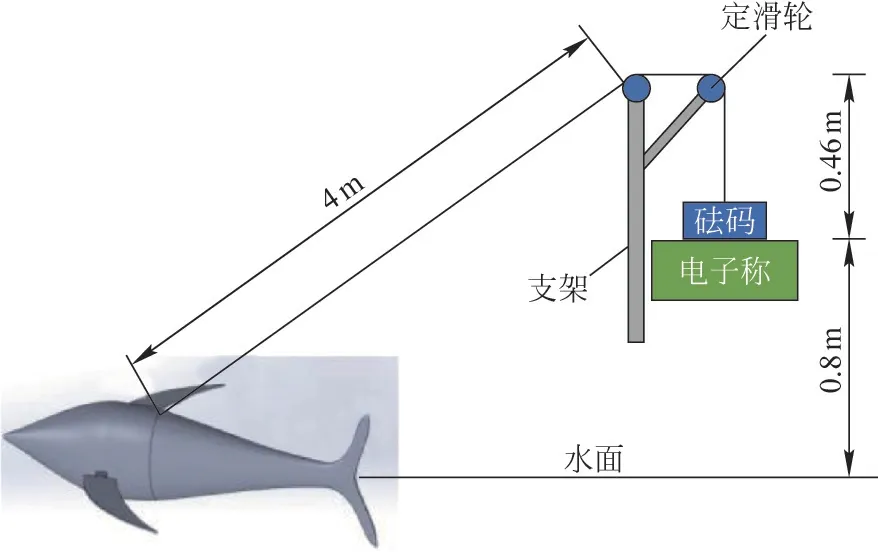
图17 测推进力实验原理图
测量鱼体速度采用的方法是,记录鱼游完使用不同长度绳子所用的时间,并且更换绳长,研究鱼体加速和匀速游动的区域。
测量涡的特征采用的方法是将色素倒入实验水池中,然后将鱼调至运动模式,放于水中,录制整个过程后,取游动稳定后的涡量图,记录涡的情况如图18 所示。
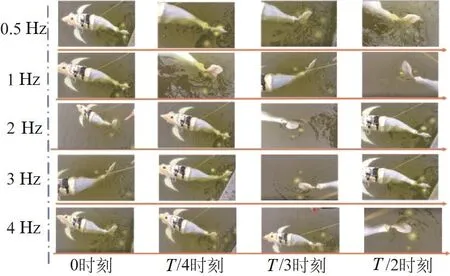
图18 测量涡实验
实验采用的方法是控制变量法,即仅改变一个参数时,多次实验,去掉远离平均数的值,取前3 组正常值的平均值;研究其他因素对于鱼体游动性能的影响时,仅改变单一变量,并多次重复实验取平均值。
4.2 实验结果分析
由图19 可以看出,推进力首先随着频率的增大而增大,然后频率从3 Hz 继续增大至4 Hz 时,推进力反而减小;加入胸鳍辅助鱼体游动后,其中胸鳍摆动频率和尾鳍摆动频率保持一致,推进力和无胸鳍的变化规律一样,随着频率增大至3 Hz,鱼体推进力持续增大,随着频率继续增大至4 Hz,推进力反而减小。另外,在频率下相同时,有胸鳍辅助的一组相比无胸鳍辅助的一组,推进力更大。
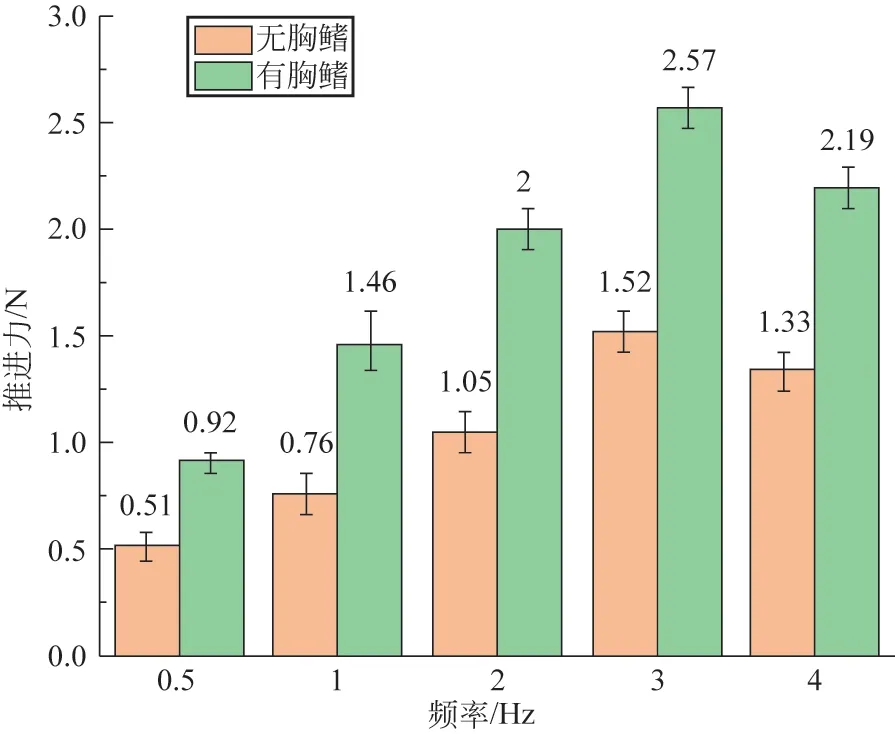
图19 推进力-频率图
该结果说明,尾鳍摆动频率为3 Hz 时,鱼体推进力最大,同时胸鳍在45°~135°内转动时,也能增大推进力,最大推进力为2.565 N。
比较游速与频率的关系,使用的实验方法是将鱼体用长3 m 的绳子绑住,然后改变尾鳍摆动频率,进行直游,计时游完整段绳子所用的时间。
由图20 可以看出,随着尾鳍摆动频率的增大,游完3 m 绳子所用的时间依次减小,当频率从3 Hz 继续增大,所用时间反而增加;加入胸鳍辅助后,游完3 m绳子所用时间随着频率的增大而减小,当频率从3 Hz继续增大时,所用时间同样增加。当频率相同时,有胸鳍辅助相比无胸鳍辅助,游完3 m 绳子所用时间更短。该结果说明,3 Hz 尾鳍摆动频率为鱼体游动最佳频率,胸鳍从水平方向顺时针45°到逆时针45°内,即90°,鱼体的推进力相比其他角度的推进力更大。

图20 速度-频率图
由以上实验可知,3 Hz 是鱼体游动最快时的频率,所以此处使用的方法是将鱼体用长1 m、2 m、3 m、5 m 的绳子绑住,然后让鱼体以3 Hz 的频率摆尾前进,记录游完绳长时间。
由图21 可以看出,鱼体游完1 m 绳子的时间稍微长于游完1 ~2 m 及2 ~3 m 长度段的时间以及3 ~5 m 长度段时间的一半,故鱼体加速时间仅仅在1 s 内。当引入胸鳍辅助游动后,游完相同长度的时间相比无胸鳍辅助的时间更短、速度更快。

图21 速度-距离图
由图22 可以看出,频率越大,生成涡的数量越多,从图22a 中得到,时间均为1 s,尾鳍摆动频率为0.5 Hz 时,可见涡数量为1;尾鳍摆动频率为4 Hz,可见涡数量为3。随着时间的推进,涡的数量会先增多,后减少,尾鳍摆动频率为4 Hz,从图22a 中得到,尾鳍摆动频率为4 Hz,时间为1 s、2 s、3 s、4 s 时,可见涡数量分别为3、4、4、3。最大涡的尺寸也是随着时间的推移,先增大后减小,直至湮灭。从图22b 中得到,尾鳍摆动频率为0.5 Hz,时间为1 s、2 s、3 s、4 s 时,可见涡数量分别为1、2、1、0,可见涡的最大尺寸分别为41 cm、51 cm、40 cm、0 cm。
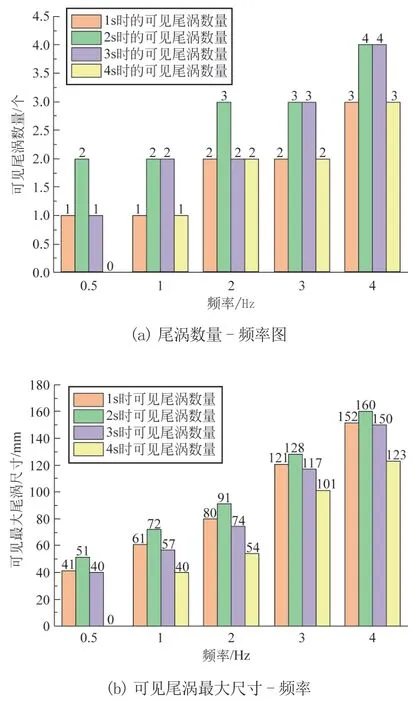
图22 尾涡特征-频率
5 结论
为探究胸鳍拍动以及胸尾鳍运动频率和幅度对于鱼体游动速度的影响,论文提出了一种四关节串联尾鳍、单自由度胸鳍的仿生机器鱼。首先进行了仿生机器鱼的结构和控制系统设计,为仿真提供了鱼体空腔模型,并为实验验证提供了硬件平台;以机器鱼体干线为研究基础,建立其运动学模型,并基于牛顿下山法求解弧长公式以维持鱼体长度不变,为仿真提供了鱼体轮廓变形方程;然后以仿真比较胸尾鳍运动参数对鱼体推进力的影响,在此基础上,研究最佳运动参数下的鱼体和流场应力、流速、涡等水动力学性能;最后设计了实验方案并开展实验,在实验层面研究鱼体水动力学性能,以验证仿真结果。仿真与实验均说明:胸尾鳍最佳运动频率为3 Hz,而且胸鳍转动可以辅助鱼体直游,增大推进力。本文研究有利于改善水下航行器的多姿态运动方式,并为后续流体中变形物体的运动性能分析提供了可借鉴的方法。
猜你喜欢
机械设计与制造(2021年8期)2021-08-26
南方农业学报(2020年7期)2020-11-09
海洋工程(2020年1期)2020-04-10
机械工程师(2018年1期)2018-12-29
养生保健指南(2017年8期)2017-12-09
东方法学(2017年4期)2017-07-13
船舶力学(2017年5期)2017-06-05
科学Fans(2017年3期)2017-04-13
中北大学学报(自然科学版)(2016年6期)2016-12-23
微特电机(2016年8期)2016-11-26