基于CFX的仿生鱼尾摆动水动力仿真及优化
2018-12-29 06:36尹昱康张兵吴海平鲁小翔成玉龙刘元旭
机械工程师 2018年1期
尹昱康, 张兵, 吴海平, 鲁小翔, 成玉龙, 刘元旭
(合肥工业大学机械工程学院,合肥 230009)
基于CFX的仿生鱼尾摆动水动力仿真及优化
尹昱康, 张兵, 吴海平, 鲁小翔, 成玉龙, 刘元旭
(合肥工业大学机械工程学院,合肥 230009)
仿生机器鱼作为一种独具特色的水下机器人,备受军事、工业部门广泛关注。文中介绍了一种基于CFX的二维摆动尾鳍推进性能的水动力仿真分析方法,采用先进计算流体力学方法对其长度、摆动频率进行分析。通过选取较好的尾鳍物理、运动参数,达到二维摆动尾鳍高效推进的目标。采用三次样条曲线拟合尾鳍摆动的振型函数,实现其振型函数优化,以提高推力、增大航程。结果表明优化后的振型函数可使尾鳍获得更大的推力,较初始振型函数可提高548.8%。
CFX;二维摆动尾鳍;数值分析;推进性能
0 引 言
随着世界社会经济的发展,人类对于自然资源的需要量愈来愈大。海洋在地球上所占面积约为2/3,其中蕴含着大量的自然资源。为了获得这些资源,世界各国争相研发深海水下探测器[1]。目前世界各国所研发的实用水下探测器大多需耗用大量资源,科学家发现生活在水中的鱼类仅需较少的能量,便能实现高效的行动,仿生机器鱼应运而生[2]。
为了提高仿生机器鱼的推进性能,很多学者对仿生鱼尾摆动的水动力性能进行了仿真分析。苏玉民[3]对三维摆动尾鳍的推进性能及其产生的复杂流场进行了讨论,刘恕华[4]对水下机器人的水动力参数运动进行了稳定分析,David Scaradozzi[5]论述了提高水下机器人控制效率的方法,段卓[6]设计了新型的仿鱼尾推进装置,Zhang Weibing[7]对机器鱼建立了仿真系统。
本文针对二维机器鱼的尾鳍摆动进行建模仿真。采用Pointwise软件划分水动力分析流场网格,通过CFX仿真模拟,分析二维尾鳍在不同长度、不同摆动频率做周期性摆动时,其能够产生的平均推力大小。在比较二维摆动尾鳍产生的平均推力大小后,给出所计算分析的较优尾鳍物理、运动参数的特征。此外对尾鳍摆动的振型函数采用三次样条曲线进行拟合,实现其振型函数的优化。
1 仿生机器鱼的建模
1.1 仿生机器鱼的三维模型
鱼类的身体可分为头部、躯干和尾鳍,应用Catia V5R20软件进行仿生机器鱼的三维建模。为了使机器鱼内部的舵机部分可见,将机器鱼的鱼体设置了25%的透明度。可以看到,该仿生机器鱼采用尾鳍摆动进行驱动,其内部装有的舵机可直接驱使尾鳍做周期性摆动。仿生机器鱼的三维模型如图1所示。
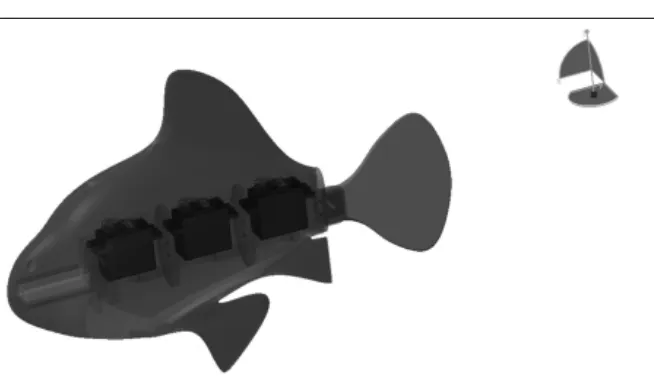
图1 机器鱼三维模型
1.2 仿生机器鱼的二维模型
仿生机器鱼的二维模型可取三维模型平行于xy平面的最大截面。鱼体外形为NACA0012翼型),在鱼体尾部衔接一个悬臂梁作为尾鳍(Tail),悬臂梁的长度即为尾鳍的长度物理参数。鱼体长度为1 m,尾鳍长度为0.5 m。仿生机器鱼的二维模型如图2所示,应该注意的是悬臂梁截面是有一定宽度的,因宽度较小在图中不易看出。
1.3 二维尾鳍的摆动数学模型
设定仿生机器鱼在游动过程中,鱼体(Body)部分没有摆动现象[8],尾鳍绕O点做周期性摆动,其摆动数学模型如图2所示。尾鳍的运动规律可以表示为

其中:φ(x)为尾鳍摆动的振型函数,m;t为尾鳍摆动时间,s;ω为尾鳍运动角频率,rad/s。
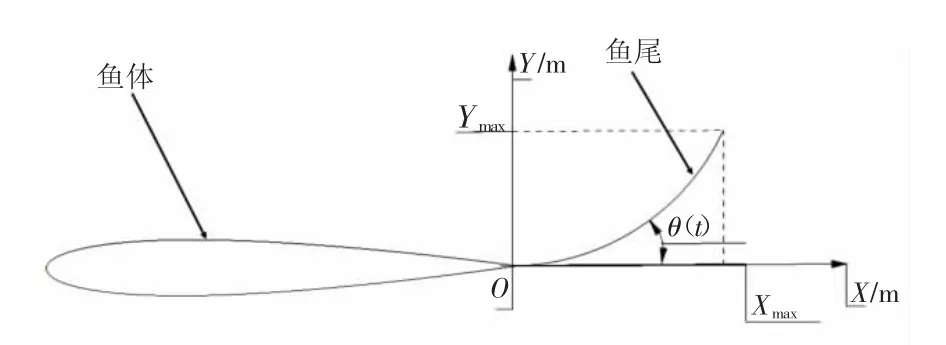
图2 机器鱼二维模型及摆动数学模型
2 流场网格划分
Pointwise软件能够简化网格生成过程,其采用标准图形界面,典型的平面菜单结构,标准的键盘热键设计和用户个性化设计,使操作更加简便。在Pointwise中可划分结构化网格和非结构化网格,结构化网格可以较容易实现区域的边界拟合,网格生成的质量好且数据结构简单。因此二维尾鳍的绕流网格可采用结构化网格,远场尺寸为19.6 m,网格总数量为20 640个,鱼体周向分布129网格点,尾鳍131格点。第一层网格高度为0.001 m,网格增长率为1.1,网格划分完毕后如图3、图4所示。
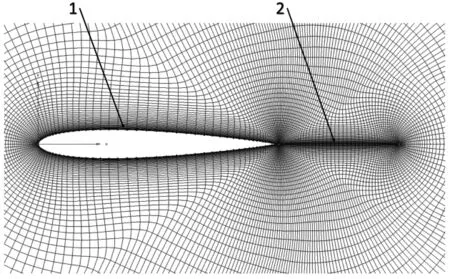
图3 流场网格局部视图
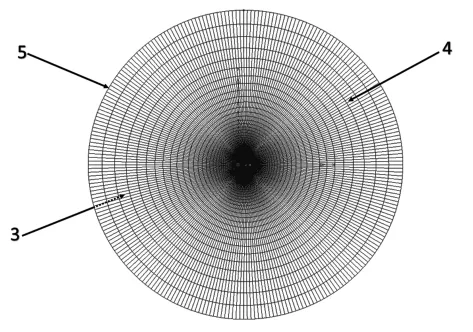
图4 流场网格整体视图
网格划分完毕后,需要对各个边界条件进行设置,具体设置参数见表1所示。
表1 网格边界条件
3 水动力仿真分析
3.1 尾鳍物理、运动参数分析
3.1.1 计算参数
CFX凭借其强大的运算能力,可通过设置函数表达式实现二维尾鳍摆动仿真模拟,使用简单快捷,运算结果精度高,在广大科研工作者中使用率逐年上升。在模拟二维尾鳍摆动时,假设水流速度为0,机器鱼依靠其尾鳍做周期性摆动为全鱼提供推力,实现机器鱼的前进、转向等动作。这里建立一种简单的振型函数为
式中:x为尾鳍上点的坐标,m;xmax为x的最大值,m;ymax为xmax在处的最大位移,m。
在计算域中,流体模型中的传热模型采用等温25℃,湍流模型采用剪切压力传输(SST)k-w模型,定常流动。仿真计算总时间为10 s,时间步长为0.02 s。边界条件的设置与网格边界条件设置一致,初始条件设置水流流速为0。在监控对象中新建ForceX,表达式值标记为FX,ForceY的设置亦如此。ForceX为二维尾鳍摆动时在X方向产生的力,当其为负值时即推动机器鱼前行的推力,为正值时则可认为是阻滞机器鱼前行的阻力。ForceY为二维尾鳍摆动时在Y方向产生的力,这里只考虑二维尾鳍摆动在X方向的力,重点研究该力对机器鱼前行的影响。
图5 尾鳍在X方向的受力
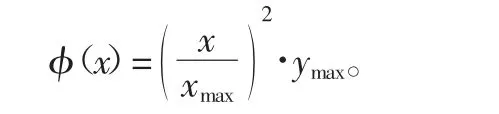
选取机器鱼的鱼体长度为1 m,尾鳍在X方向长度为0.5 m、1 m,以及尾鳍摆动频率分别为0.5 Hz、1 Hz、2 Hz时二维尾鳍摆动10 s在X方向产生的力进行仿真分析。自然界中鱼类的尾鳍摆动角度有一定范围,摆角一般不会太大,且尾鳍会有一定的挠度。在本仿真分析中,在尾鳍长为0.5 m、1 m时分别设定尾鳍在Y方向能到达的最大值ymax为0.12 m、0.2 m。
3.1.2 二维尾鳍推力分析
当尾鳍长度为0.5 m且摆动频率分别为0.5 Hz、1 Hz、2 Hz时计算得到如图5的尾鳍在X方向的受力变化图。
通过图5可以明显看出尾鳍摆动产生的推力极值随尾鳍摆动频率逐渐增大。为了定性的说明这个结论,将CFX中仿真的数据求平均值,得到当尾鳍摆动频率为0.5 Hz、1 Hz、2 Hz时,尾鳍产生的平均推力分别为-13.6 N、-49.1 N、-177.5 N。因此,可以认为在较低频率时二维尾鳍摆动产生的推力随摆动频率增加而渐增。
为了说明尾鳍物理参数对尾鳍产生推力大小的影响,这里仅对频率为1 Hz时的数值进行对照分析。取尾鳍长度为1 m,因尾鳍长度增大,将尾鳍在Y方向能到达的最大值ymax适当上调至0.2 m,以使计算结果更加可靠。计算结果与尾鳍长度为0.5 m时的对比如图6所示,可以定量说明尾鳍较长时摆动产生的推力较大。为更加准确地说明,同样将CFX中仿真的数据求平均值,得到尾鳍长1 m、摆动频率1 Hz时尾鳍产生的平均推力为-280.1 N,可见尾鳍长度对产生推力的大小是有影响的,且在合理范围内较长的尾鳍能够产生更大的平均推力。

图6 尾鳍长度不同时在X方向的受力
3.1.3 二维尾鳍压力分布
当尾鳍长度为0.5m时,图7~图9显示了尾鳍以不同频率摆动时的压力分布。该时刻尾鳍向着前进方向右侧摆动。尾鳍右侧产生广泛的正压区,左侧则产生广泛的负压区,机器鱼就是依靠这样的压差产生前进的推力[9]。
当尾鳍摆动频率为0.5 Hz时,压强区出现的压力极值分别是191.1 Pa和-604.9 Pa,极值压差为796.0 Pa;当尾鳍摆动频率为1.0 Hz时,压强区出现的压力极值分别是812.7 Pa和-2324 Pa,极值压差为3136.7 Pa;当尾鳍摆动频率为2 Hz时,压强区出现的压力极值分别是3753 Pa和-8628 Pa,极值压差为12 381 Pa。从极值压差来分析,随着尾鳍摆动频率的增加,机器鱼在游动时所受到的推力会增加,特别是从1 Hz到2 Hz时会有一个大幅的提升。
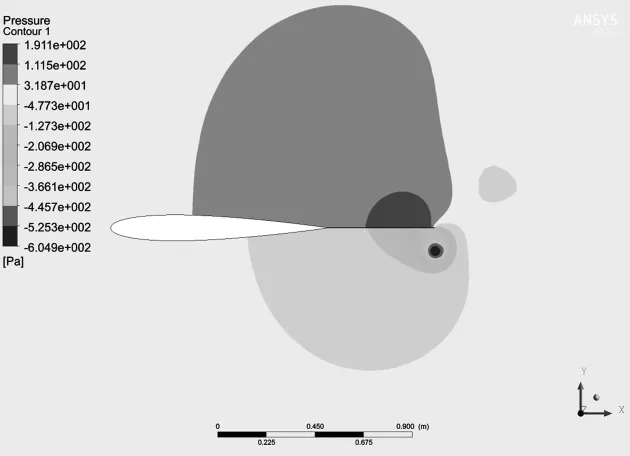
图7 摆动频率0.5 Hz时压力分布
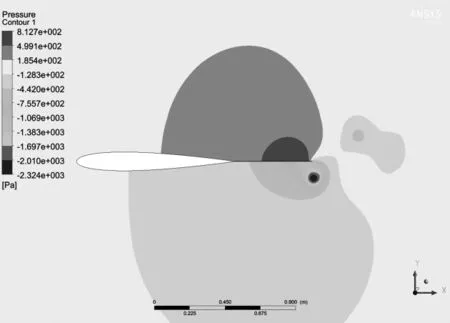
图8 摆动频率1 Hz时压力分布
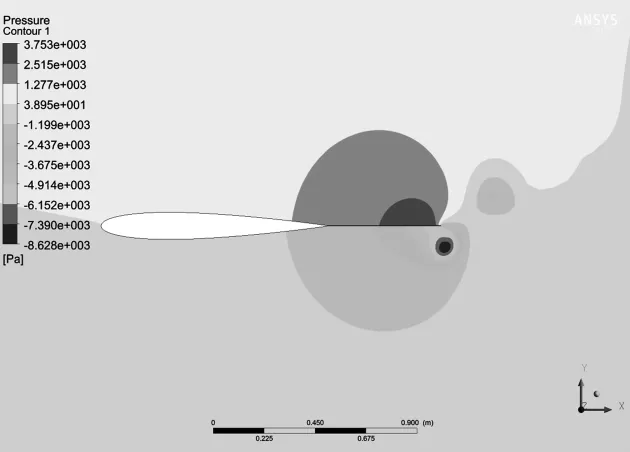
图9 摆动频率2 Hz时压力分布
从压力分布的角度分析,当尾鳍摆动频率为0.5 Hz时,尾鳍上的压差区大致可以分为4段,分别是557.2 Pa、477.6 Pa、318.4 Pa和159.32 Pa,且越靠近鱼体,压差呈减小的趋势。此时除了尾鳍附近存在压差,鱼体附近也存在着2段压差区,分别是79.63 Pa和159.32 Pa,压差区大约占整个鱼体的1/2。
当尾鳍摆动的频率为1 Hz时,尾鳍上的压差区大致可以分为5段,分别是2195.7 Pa、1881.7 Pa、1254.7 Pa、941.1 Pa和627.4 Pa,且越靠近鱼体,压差呈减小的趋势。此时除了尾鳍附近存在压差,鱼体附近也存在着2段压差区,分别是627.4 Pa和313.7 Pa,且每个压差区各约占鱼体长度的1/3。
当尾鳍摆动的频率为2 Hz时,尾鳍处湍流区面积明显扩大,尾鳍上的压差区大致可以分为5段,分别为8667、7428、6190、4952、3714 Pa,且越靠近鱼身,压差呈减小的趋势。此时鱼体附近几乎全部存在着压差区,约为1238 Pa。
因此从鱼身压力的角度分析,当需要快速移动时,采用2 Hz的频率比较合适,但是随之带来的是鱼身周围的压差范围变大,且压差也变大,致使机器鱼在游动过程中的不稳定。若要使仿生机器鱼执行侦察之类的任务,采用0.5 Hz的频率,使鱼身稳定,便于对机器鱼的控制。
3.1.4 二维尾鳍速度及流线分析
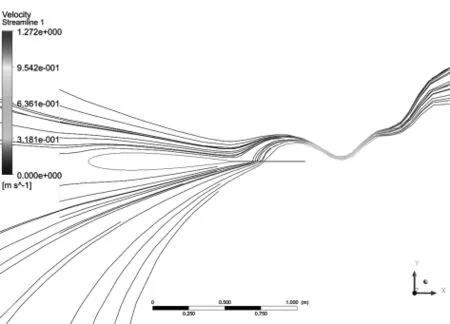
图10 摆动频率0.5 Hz时流线分布
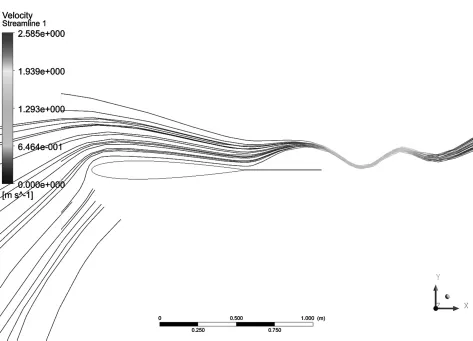
图11 摆动频率1 Hz时流线分布
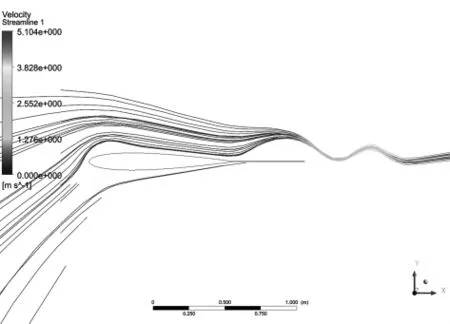
图12 摆动频率2 Hz时流线分布
对尾鳍长度为0.5 m时不同摆动频率进行二维流场仿真分析,对比图10~图12,当鱼尾的摆动频率为0.5 Hz时流线在鱼体上下均有分布且贯穿尾鳍中部,摆动频率为1 Hz时流线主要分布在鱼体上方,摆动频率为2 Hz时流线较1 Hz更加密集。流线上各点的几何切向就是该点的流体微团的速度方向[10]。在同一流场下,3种不同的摆动频率导致的流线分布密集程度不同,越密集的流线分布,此处的流速越大,在相互作用力下,可知推力越大。
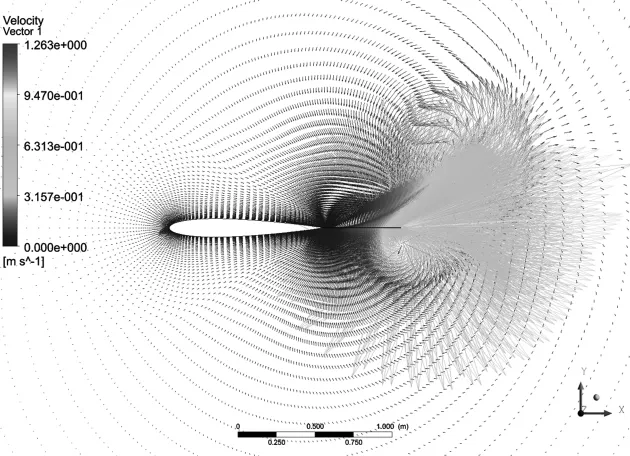
图13 摆动频率0.5 Hz时速度矢量

图14 摆动频率1 Hz时速度矢量
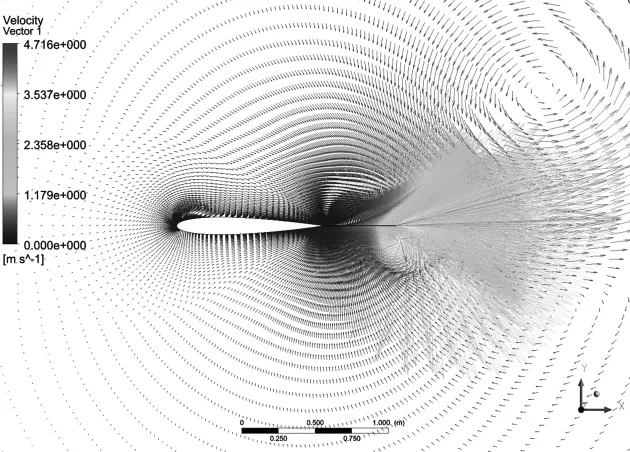
图15 摆动频率2 Hz时速度矢量
由图13~图15可以看出不同摆动频率下的速度矢量分布情况,分别将图10与图13,图11与图14,图12与图15进行对比,不同摆动频率下的速度矢量分布情况与流线的分布存在相似性。比较可知,在0.5 Hz的摆动频率下,流线分布比较分散,在靠近尾鳍的部分流线分布密集,速度矢量较密集,在尾端会出现涡流现象。在1 Hz的摆动频率下,流场分布较密集,流场中的速度矢量较0.5 Hz情况下大,且尾端出现分离涡,在2 Hz的摆动频率下,流线分布最密集,流速最大,速度矢量分布更密集。
从流线和速度矢量综合分析,在0.5 Hz的摆动频率下,流线相对集中在尾鳍部位,从而带来较小的速度,产生的推力较小,在2 Hz时流线分布更广,较密集,速度矢量分布带来较大的速度差,产生较大的推力。因此为了获得较快的前进速度,可以采用2 Hz的摆动频率。
3.2 尾鳍摆动振型函数优化
3.2.1 振型函数的建立
仿生机器鱼的尾鳍采用具有较大柔性的材料,通过合理控制驱动尾鳍摆动的动力,可以实现尾鳍不同的振动形式。尾鳍在水下摆动时,因振动形式不同其所受的阻力亦不相同。采用二维尾鳍进行分析时,将尾鳍简化为一悬臂梁,研究其在采用不同振型函数时通过做周期性振动产生平均推力的大小。
尾鳍的柔性较大时,可采用三次样条曲线。样条,即富有弹性的匀质细木条、金属条或有机玻璃条。它围绕着按选定位置放置的重物或压铁作弹性弯曲,以获得所需要的曲线[11]。这种样条所生成的曲线很光顺,可以用来拟合二维尾鳍的振型函数。
使用型值点处的一阶导数表示插值三次样条曲线,为了拟合尾鳍长度为0.5 m、尾鳍在Y方向能到达的最大值ymax为0.12 m时的三次样条曲线,定义型值点、设置m2=0.24,改变m0的值以拟合出不同的三次样条曲线。
在Matlab中进行编程,P0、P1之间的曲线为拟合的振型函数图像。改变m0的值,可以获得不同的三次样条曲线形状,同时可以输出其函数表达式。这些表达式即可作为尾鳍摆动的振型函数,m0的值依次选取0.48,0.24,0.12,0,-0.12,-0.24,-0.26,相应的振型函数图像如图16所示,曲线由上至下的m0值依次递减。

图16 不同m0值时的振型函数
3.2.2 振型函数的分析优化
二维尾鳍摆动采用不同的振型函数,其水动力性能有一定的差异[12]。振型函数的分析优化,就是在选取大量不同m0进行仿真计算,获取较优的振型函数。分析不同振型函数时,使用CFX软件进行仿真计算尾鳍产生的平均推力,计算结果如表2所示。比较所取的7个m0值产生的平均推力,可以看出振型函数为

此时可使尾鳍获得更大的推力,较初始振型函数(m0=0.48)可提高548.8%。因此为了获得较大的平均推力,在拟合的7种振型函数中可以选择该振型函数,实现振型函数的分析及优化选择。
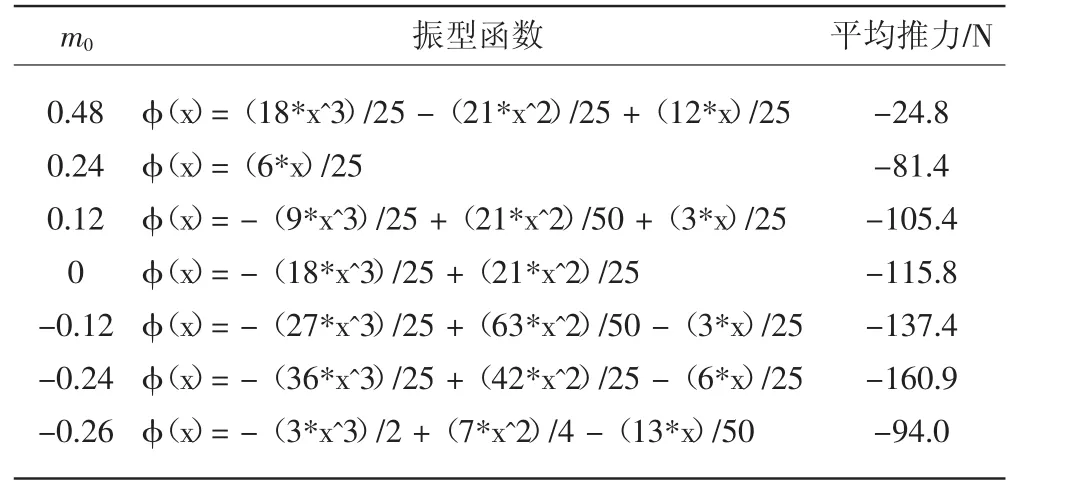
表2 不同振型函数时平均推力大小比较
4 结论
由上述分析结果得出:机器鱼依靠尾鳍做周期性摆动产生推力前进,二维尾鳍的长度、摆动频率对机器鱼产生的平均推力大小有一定影响。尾鳍长度在合理范围内较长的与较短的相比,能够产生更大的平均推力,摆动频率在低频率范围内产生的平均推力随摆动频率增加而渐增。通过对二维尾鳍摆动的振型函数分析,给出较优的函数形式,充分体现了CFX软件在流动仿真分析中的作用,对解决仿生机器鱼物理、运动参数的优化设计具有指导意义。
[1] 谢广明,何宸光.仿生机器鱼[M].哈尔滨:哈尔滨工程大学出版社,2013.
[2] 谢广明,何宸光.自主仿生机器鱼[M].哈尔滨:哈尔滨工程大学出版社,2013.
[3] 刘恕华.水下机器人水动力性能分析与仿真 [J].舰船科学技术,2017(2):124-126.
[4] 苏玉民,张曦,杨亮.摆动尾鳍水动力性能的试验和数值研究[J].海洋工程,2012,30(3):150-158.
[5] SCARADOZZI D,PALMIERI G,COSTA D,et al.BCF swimming locomotion for autonomous underwater robots:a review and a novel solution to improve control and efficiency [J].Ocean Engineering,2017,15(1):437-453.
[6] 段卓,黄贺,董二宝,等.新型仿鱼尾推进装置设计与水动力学仿真分析[J].机电一体化,2016(9):7-10.
[7] ZHANG Weibing,LIANG Chuguang,ZHU Yunhang.The Real-Time Simulation System of Bionic Robot Fish Water-Polo-Game Based on MSRS [J].Applied Mechanics and Materials,2014,644-650:294-297.
[8] 冯静安,晁贯良,王卫兵,等.基于Fluent的仿生机器鱼胸鳍摆动模型仿真分析[J].机床与液压,2014,42(9):124-126.
[9] 杨亮,苏玉民.粘性流场中摆动尾鳍的水动力性能分析[J].哈尔滨工程大学学报,2007,28(10):1073-1078.
[10] 陆志良.空气动力学[M].北京:北京航空航天大学出版社,2009:44-46.
[11] 常智勇,万能.计算机辅助几何造型技术[M].3版.北京:科学出版社,2013:24-32.
[12] CHEN Hong,JIAN Chunpeng,XU Gang.Propulsive Efficiency AnalysisonC-StartofRobotFish[J].AdvancedMaterialsResearch,2011,199-200:62-67.
Hydrodynamic Analysis of Flapping Motionfor Robot Fish Tail Based on CFX
YIN Yukang,ZHANG Bing,WU Haiping,LU Xiaoxiang,CHENG Yulong,LIU Yuanxu
(School ofMechanical Engineering,Hefei UniversityofTechnology,Hefei 230009,China)
As a kind of unique underwater robot,bionic robot fish is becoming the most advanced machine.This paper introduces a simulation and analysis method of the propulsive performance of two dimensional flapping caudal fin based on CFX.The length and movement frequency of flapping caudal finare analyzed by using advanced computational fluid dynamics technology.By selecting the better physical and motion parameters of the caudal fin,the goal of improving the efficiency of the two dimensional flapping caudal fin is achieved.Based on the CFD software,the motion shape function of the tail fin is fitted with 3-order spline,and the optimization of the vibration mode function is achieved to improve the thrust and increase the voyage.The results show that the optimized vibration mode function can increase the thrust of the caudal fin,which is 548.8%higher than that of the initial vibration mode.
CFX;two dimensional flapping caudal fin;numerical analysis;propulsion performance
TP 391.7
A
1002-2333(2018)01-0107-06
合肥工业大学2016年校级大学生创新性实验(2016CXCY041)
(编辑立 明)
尹昱康(1994—),本科生,飞行器制造工程专业。张兵(1981—),副教授,硕士生导师。
张兵,zhangbing_end@163.com.
2017-03-31
猜你喜欢
轻工机械(2022年5期)2022-10-31
浙江大学学报(理学版)(2022年1期)2022-02-21
小型微型计算机系统(2021年12期)2021-12-08
水电与抽水蓄能(2021年2期)2021-05-14
农业工程学报(2021年4期)2021-05-09
南方农业学报(2020年7期)2020-11-09
农业工程学报(2020年6期)2020-05-19
VOGUE服饰与美容(2019年10期)2019-12-02
江苏科技大学学报(自然科学版)(2018年4期)2018-10-11
西南石油大学学报(自然科学版)(2018年4期)2018-08-02