
无人机自主配电管理技术研究
2023-09-07 02:48蒋林伸
中国新技术新产品 2023年14期
蒋林伸
(成都飞机工业(集团)有限责任公司,四川 成都 610092)
先进无人机正朝着多电、全电方向发展,电子设备越来越多,任务系统越来越复杂。自主配电系统成为未来无人机发展的关键。实现不间断供电和容错等级,提高供电系统的灵活性、维护性和可靠性,已是现代无人机的必备技术。由于无人机系统大部分时间需要自主飞行和自主执行任务,自主配电自然成为其执行任务不可或缺的保证。
随着总线和计算机技术的发展,配电系统的管理与控制技术由常规配电、遥控配电向自主配电发展。在自主配电系统中,自动控制方程按电气负载管理要求控制各电子功率开关的接通或断开,反映无人机系统飞行状态、电气系统状态、电气负载状态等相关的物理量,均是自动控制程序的控制输入条件。配电系统自动控制程序根据控制条件,实时解算控制指令,实现电气负载通/断控制。同时,无人机系统各飞行阶段的供电需求也是控制条件之一。
因此,该文总体的研究思路如下:采用先进的1553B 通信总线,以电气负载管理为中心,进行自主动态配电技术研究,为进一步进行现代无人机配电系统研究和产品工程化打下良好基础。
1 系统结构
无人机自主配电系统主要包括配电中心、二次电源装置、供电系统处理机、固态功率控制器和总线等。常规无人机电气系统存在自主化水平低、重构能力差、无监测系统和拓展性差的问题,自主配电系统解决了无人机的电源品质问题,它能够充分利用电源之间和蓄电池的备份关系,提供多余度的供电,并运用实时监测系统来监测系统的工作状态,避免无人机在飞行过程中因供电问题造成的工作异常。在不同任务剖面下选择不同配型,拓展性能较好。
某无人机配电系统由中央配电装置、电气负载控制中心1(ELCC1)、电气负载控制中心2(ELCC2)和电气负载控制中心3(ELCC3)组成。电气负载控制中心1(ELCC1)给电气负载1、负载2 和负载3 配电,电气负载控制中心2(ELCC2)给负载4 和负载5 配电,电气负载控制中心3(ELCC23)给负载6 和负载7 配电。系统交联如图1 所示。

图1 自主配电系统结构图
作为现代无人机分布式配电系统的重要组成部分,电气负载管理中心(ELMC)负责电气负载控制和管理,并与电源系统处理机进行实时通信,这就要求电气负载管理中心不仅要具有高可靠性,还需要提高其测试性,以满足故障预测和健康管理。某无人机配电系统电气负载管理中心从中央汇流条获取电能,控制电能向电气负载输出。自主配电系统电气负载管理中心具备如下功能:1)负载管理。根据无人机电源系统处理机(PSP)的指令或者无人机发电系统的状态及飞行阶段,通过控制电子开关来实现负载的控制与管理。2)故障诊断。判断无人机配电系统电气负载及电气负载管理中心的故障类型。3)实时通信。电气负载管理中心通过无人机1553B总线,从无人机电源系统处理机接收控制指令,包括电子开关的接通/断开、无人机当前飞行阶段、发电机工作状态以及电气负载用电需求。同时将电气负载管理中心的当前状态数据送往无人机电源系统处理机。4)自检测(BIT)。无人机电气负载管理中心需要完成CPU、A/D 采集和1553B 通信等的自检测,以提高无人机系统的测试性。5)保护功能。当无人机电气负载出现短路故障时,能自动切除无人机电气负载,保护无人机供电系统[1]。
2 自主配电控制策略
2.1 控制原理
无人机电气负载管理优先级矩阵是自主配电系统的核心算法。无人机发电机数目、发电机容量、配电盒数量、飞行阶段、电气负载类型及其功率要求等参数可综合界定各电气负载的优先级。无人机自主配电系统电气负载管理优先级主要体现在如下3 个方面[2]。
首先,负载类型。无人机自主配电系统电气负载按重要性分为3 类,即飞行关键电气负载、任务关键电气负载和一般电气负载。当无人机电气系统正常时,飞行关键电气负载、任务关键电气负载和一般电气负载都能正常供电;当无人机主电源系统出现故障时,先断开一般电气负载,尽量保证任务关键电气负载的供电;当无人机主电源全部失效时,断开一般电气负载和任务关键电气负载,应急电源保证飞行关键电气负载供电。因此,任何情况下具有最高供电优先权的都是无人机飞行关键电气负载,具有较高供电优先权的是任务关键电气负载,优先权最低的是一般电气负载。
其次,负载功率。无人机自主配电系统电气负载功率按飞机飞行阶段统计,按工作持续时间分类。飞行任务、飞机工作状态和电源工作情况等因素决定了无人机上电气负载的工作情况,因此对无人机电气负载功率进行统计后,有3 种描述方式,即正常工作电气负载功率图、应急工作电气负载功率图和地面供电电气负载功率图。电源容量必须满足不同飞行阶段下电气负载的功率要求。
再次,飞行阶段。无人机飞行阶段分为滑行、起飞爬升、巡航、任务1、任务2、任务3、着陆和应急返航等。各飞行阶段用电负责类型不同,因此按飞行阶段分为个8 个优先级(见表1),每个飞行阶段对应一个优先级,不同的优先级对应不同的电气功率。

表1 电气负载管理优先级与飞行任务方式的关系
无人机自主配电系统各飞行阶段对应不同的电气负载,因此不同优先级也对应不同的电气功率。当电源系统出现故障,电源容量不能满足当前飞行阶段所需的功率时,电气负载自动管理程序会控制与当前飞行阶段关系最小的电气负载下电,按优先级自动控制负载功率小于当前电源系统的容量。
无人机自主配电系统电气负载管理通过解算一个8×119阶的控制矩阵来表达优先级和负载之间的关系,见表2,其中119 为整个飞机电气系统中功率控制器的个数[3]。
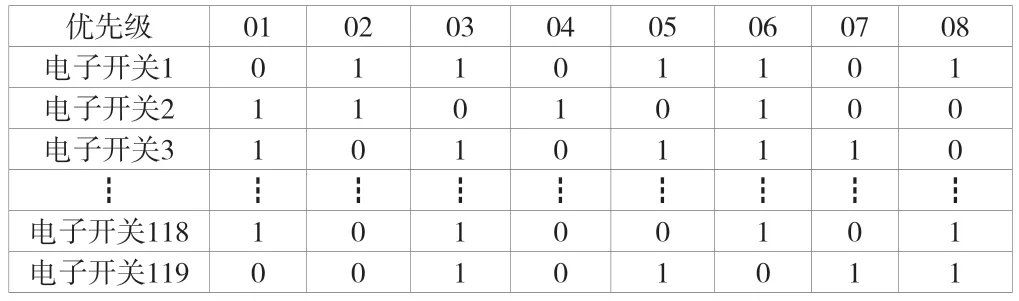
表2 优先级矩阵
在该无人机自主配电系统矩阵中,用列表示电气负载优先级,用行表示电气负载对应的电子功率控制器。如果Kij=1,则表示第j个优先级中,第i个负载对应的电子开关应接通;如果Kij=0,则表示在第j个优先级中,第i个负载对应的电子开关应断开。
2.2 控制模型
无人机自主配电系统电气负载管理中心自动配电软件可对无人机电气负载进行控制与管理。在无人机的不同飞行阶段,电气负载管理中心求解相应的电气负载控制指令,对电气负载进行上/断电控制。
在无人机电源系统供电正常的情况下,当无人机当前飞行阶段电气负载控制要求满足时,该阶段自主配电系统电气负载上电工作。无人机自主配电系统电气负载控制程序的解可以分为3 种类型,相应控制指令解由Z1、Z2、Z3表示。
I 类控制指令只与飞行任务有关,数学模型形式如公式(1)所示。
式中:R为某飞行阶段电气负载工作信号,R=1 表示信号有效,R=0 表示信号无效。
II 类控制指令不仅与飞行阶段有关,还与状态逻辑信号有关。数学模型形式如公式(2)所示。
式中:R的含义同I 类指令;Ai为状态信号,Ai=1 表示信号有效。
III 类控制指令对应的电气负载在各个飞行阶段都需要工作,数学模型形式如公式(3)所示。
式中:Aj(1 ≤j≤K)为状态信号,Aj=1 表示条件满足。
电气负载的控制指令与R无关。
无人机自主配电系统电气负载的控制指令有效,表明该电气负载需要在当前飞行阶段工作。在应急情况下,如果无人机电源系统容量无法满足当前飞行阶段电气负载的功率需要,则电气负载管理中心需要自主控制部分电气负载下电;如果电气负载本身出现故障,则负载自动隔离下电。因此,通用电气负载控制数学模型如公式(4)所示。
式中:A为电气负载的状态参数,A=1 表示电气负载故障;B=1表示该电气负载为备份状态,B=0 表示该电气负载为主工作状态;P为优先级,P=1 表示允许上电;Z对应Z1、Z2和Z3,Z=1 有效;S为强制激励信号,S=1 表示信号有效,S=0 表示信号无效。K=1 表示可以控制电子开关接通。
3 电气负载管理中心硬件设计
现代先进无人机面临的飞行环境较复杂,因此对无人机自主配电系统电气负载管理中心控制电路的原理和环境适应性提出了较高要求。在无人机自主配电系统电气负载管理中心硬件电路设计过程中,并在满足自主配电控制策略实现的前提下,既要考虑电子电路可适应较宽温度环境的适应性,还要考虑面临的大温差冲击;既要考虑面对高空低温环境,还要考虑适应高空低气压环境;既要靠自身的电磁辐射对机载其他设备的影响,还要考虑适应复杂电磁环境的能力。
某无人机自主配电系统电气管理中心的控制电路主要由电源变换单元、自主控制单元、光耦隔离电路、总线电路、隔离驱动电路、信号处理单元、电流采样单元、电压采样单元以及功率器件等组成。该文根据某电气负载管理中心的功能要求,对其控制电路进行了设计,电气负载管理中心功能框图如图2 所示。
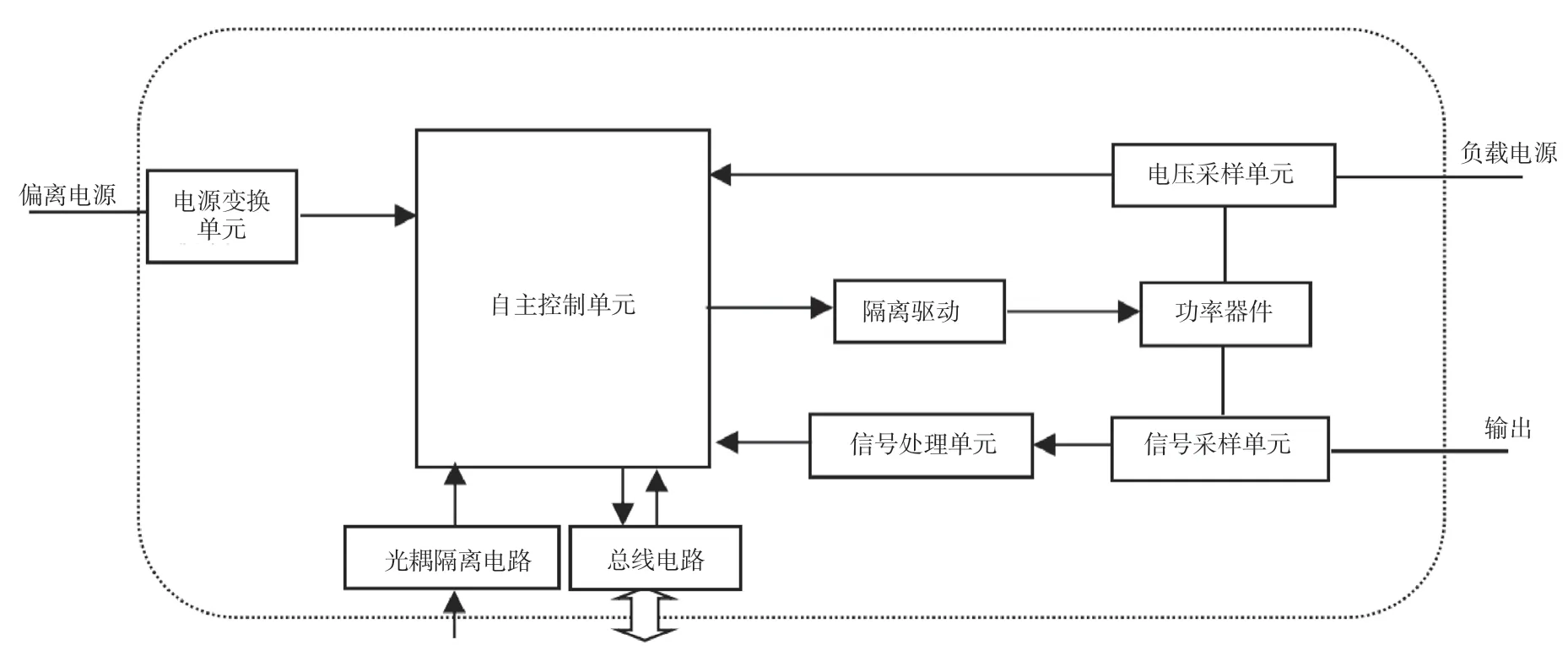
图2 电气负载管理中心功能框图
电气负载管理中心电源变换单元主要是将机载28V 输入电源转换为电气负载管理中心内部+5V 工作电源。研究表明,电子设备的失效模式60%以上是由供电电源引起的,因此在电气负载管理中心的电源变换单元中采用双电源冗余供电方式,任何一路电源工作,均能保证系统控制电路的供电需求。
电气负载管理中心自主控制单元采用JDSPF28335为主控芯片。JDSPF28335 是针对要求严格的控制应用的高度集成、高性能的解决方案。其采用高性能静态COMS 技术,主频高达150MHz,具备32 位浮点处理单元,6 个DMA 通道支持ADC、McBSP 和EMIP,还有多达18 路的PWM 输出等。
电气负载管理中心信号处理单元主要用于对电流采集单元输出的电流信号进行判断与处理。当达到短路电流的阈值时,输出快速短路信号,通过功率器件快速断开配电输出通道。
电气负载管理中心选用MOSFET(功率场效应管)管作为各路配电输出通道的功率器件,具体型号为XNM350N075T6。
光耦隔离电路检测外部的离散信号,对于离散量(地/开)信号,输入低电平0~2V;对于离散量(28V/开)信号,输入高电平DC28~32V。
电气负载管理中心总线电路的总线模块采用1553B 接口板。该接口板将输入、输出信号隔离,并集成内部瞬态抑制管和ESD 保护,可降低系统通过总线对其他系统的干扰。
电气负载管理中心隔离驱动电路的核心是隔离驱动模块。专用的隔离驱动模块的核心为平面变压器隔离技术,包括低通滤波电路、施密特触发门限电路、振荡电路、平面变压器、阻抗匹配电路和整流倍压电路。与传统的驱动电路相比,平面变压器隔离驱动模块具有工作可靠性高、开关速度快、质量轻、寿命长以及集成度高等特点。
电气负载管理中心电流采样单元采样霍尔电流检测器件,其工作原理是基于磁场的检测方法,通过电-磁-电转换环节将负载电流线性转换为电压信号。该检测方式具有良好的隔离和较低的功率损耗等优点,但它的的缺点是线性和温度特性不理想。
电气负载管理中心电压采用单元采用隔离检测模块进行模拟量电压检测,通过调整电阻分压比来实现不同输入的电压检测功能。检测信号进行滤波后送至DSP 的AD 检测模块进行检测,DSP 自带12 位的ADC 模块,可以满足0.5%的检测精度要求。
该电气负载管理中心控制电路应用于某无人机,经过沿海、高原、高寒、中雨、雪以及高空低气压等恶劣环境飞行验证后,系统功能、性能均正常。
4 结语
无人机自主配电系统是无人机系统的一个重要组成部分,可根据飞机系统完好程度、发电机状态及飞行阶段,自动管理、控制电气负载,具有容错能力强、可靠性高、维修性好、体积与质量小等优点。该文通过自主配电系统的研究,提出了一种电气负载自主管理方法,建立了电气负载自主控制模型策略和电气负载管理中心控制电路,该技术通过了无人飞行验证。无人机自主配电技术的突破对推动无人机智能化具有重大意义和实际应用价值。
猜你喜欢
现代装饰(2021年5期)2021-12-02
装备维修技术(2021年37期)2021-11-03
现代装饰(2021年3期)2021-07-22
山东冶金(2019年6期)2020-01-06
现代电子技术(2019年15期)2019-08-12
经济技术协作信息(2018年7期)2019-01-14
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
中国民族医药杂志(2016年4期)2016-05-09
河南科技(2014年16期)2014-02-27
