复杂环境下5G NR的定位技术研究
2023-10-10 06:24李雨霁
科学与信息化 2023年19期
李雨霁
西安邮电大学 陕西 西安 710121
引言
现如今,常见的室内定位技术面对复杂多变的通信环境,仍有一定的局限性,如Wi-Fi定位技术的数据采集难度高,定位误差大[1],室内蓝牙定位技术易受干扰,且扩展距离有限[2]。无线电频率识别技术的通信能力差,抗干扰性差[3]。红外线定位技术不能穿过障碍物,只能进行视线(LS)传播,容易受其他光线影响[4]等。因此,如何在NLOS环境的基础上提高5G定位系统的鲁棒性(适应复杂多变的环境),成为现阶段5G定位需要克服的难题。本文考虑到5G信号的窄波束、良好的方向性和较短的传输周期,研究了5G NR在NLOS环境下的定位技术,以应对复杂多变的环境
1 在NLOS环境下的5G定位优化算法
1.1 Chan 算法(Chan)
Chan算法是TDOA定位方法中最常用的位置计算方法,算法的推导是基于高斯随机变量,测量误差为零平均值。当基站数量大于3个时,非线性方程的数量小于未知变量的数量,可以用加权最小二乘法得到初始解,然后用得到的初始解和约束变量进行第二次加权最小二乘法估计,最后得到一个改进的位置估计。
假设误差向量近似满足高斯分布,并且有一个协方差矩阵,那么:
最终解出的估计值为:
1.2 Chan-Taylor算法(Chan- Taylor)
为了适应5G通信环境,结合两种算法的优势,本文提出了Chan-Taylor联合算法。目标方位的初始估计由Chan获得,然后由Taylor迭代计算估计值,从而获得高精度的目标方位。①通过使用Chan算法解决由TDOA定位算法建立的矩阵方程获得初始位置坐标;②将初始坐标引入泰勒计算,并进行多次迭代运算,不断优化和更新初始坐标;③进行迭代递归计算,若均方根误差达到阈值,则得到最终的估计坐标,否则将迭代坐标重复步骤2,进行泰勒迭代。
3 仿真分析
对上述各种算法进行验证仿真,并比较性能优势。假设测试场景为且设有若干障碍物的非视距环境,其中分别设定7个坐标位置(0,0),(0,7),(0,15),(5,0),(10,0),(10,7)和(10,15)来部署基站。测试结果的RMSE(均方根误差)假定为上述算法在相同的噪声干扰环境下进行100次实验模拟后的实验数据。图1所示为非视距环境下,基站数目对上述三种算法精度的影响。
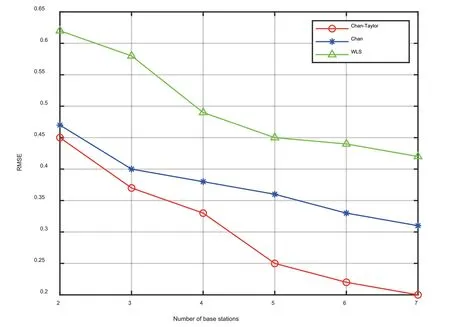
图1 基站数量对NLOS环境下定位精度的影响
由图1可得,随着基站数量的增加,RMSE(均方根误差)逐渐减小,即基站越多,精度越高;但当基站数量增加到4个以上时,再增加基站数量,RMSE(均方根误差)的变化趋于平缓。为排除基站数目的影响,本文所提出的定位方法选用7个基站。性能方面来看,Chan-Taylor联合算法的RMSE值是四种算法中最低的,这意味着联合算法具有更好的定位性能。
综上,Chan-Taylor联合算法将作为本文NLOS环境下的5G NR定位技术的主要算法。假设仿真环境与上述测试环境相同,基站部署的坐标位置有7个(0,0,3.5),(0,7,3.5),(0,15,3.5),(5,0,3.5),(10,0,3.5),(10,7,3.5)和(10,15,3.5)。表1所示为最终定位结果与误差。
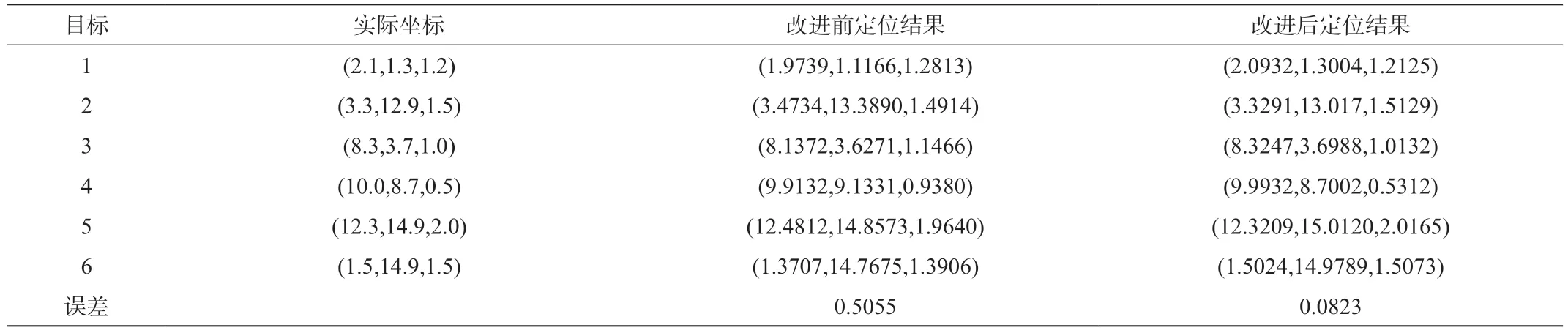
表1 定位结果的分析和误差
图2中蓝色三角形代表基站位置,红色五角星代表实际位置,空心圆和粉色圆点分别代表改进的前后的定位结果。由图2所示,该方法在NLOS环境下具有更好的定位性能。由上述可得,优化后的算法的定位误差都小于原算法的定位误差。原算法的平均误差为0.5055,而优化算法的平均误差为0.0823,说明与原算法相比,优化算法在精度上有明显提高。原始算法的均方根误差为0.7156,而优化算法的均方根误差为0.1653,说明优化算法在同一环境下的稳定性也有所提高。
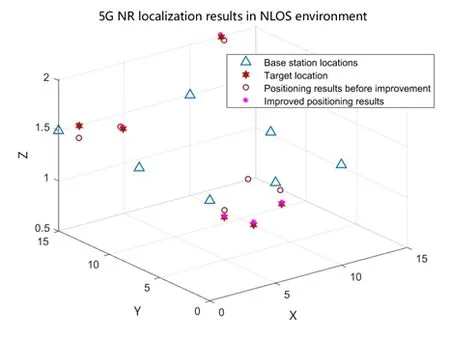
图2 仿真结果——两种定位方法的基站位置和目标位置
4 结束语
本文提出了一种算法复杂度低、精度高的5G定位方法,在用户位置、时钟误差、终端角度偏差未知的情况下,通过信道参数识别NLOS成分并进行算法补偿,获得准确的坐标信息,并采用联合算法对虚拟基站进行仿真,避免严重NLOS场景下的障碍物遮挡。仿真结果表明,Chan-Taylor联合算法是5G定位的有效解决方案,具有较高的定位精度来估计用户的位置,从而解决了在NLOS环境下无法定位的问题。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
小学生学习指导(低年级)(2019年3期)2019-04-22
探索科学(2017年4期)2017-05-04
自动化学报(2017年2期)2017-04-04
中国交通信息化(2016年8期)2016-06-06
中学生数理化·七年级数学人教版(2016年2期)2016-05-30
小猕猴智力画刊(2016年6期)2016-05-14
移动通信(2015年17期)2015-08-24
现代企业(2015年5期)2015-02-28
发明与创新(2015年29期)2015-02-27