基于改进天鹰优化器的抱杆结构优化
2023-10-12 09:47方林蒋晓琳周庆丰周焕林
科学技术与工程 2023年27期
方林,蒋晓琳,周庆丰,周焕林
(合肥工业大学土木与水利工程学院,合肥 230009)
抱杆是输电铁塔组立的重要起重工具,铁塔输送电压的提升要求输电铁塔的高度和重量增加,从而导致抱杆的高度及钢材尺寸随之增加。在满足工程使用的前提下,对抱杆进行优化设计显得尤为重要,不仅减少了运输过程的碳排放,也减少了在此方面的经济支出。
元启发式算法因其原理简单、方便,被广泛应用于测控技术、车辆工程、燃油转输、电力建设、航空航天等领域。于燕南等[1]使用镜面反射算法优化桥式起重机的金属结构,在满足规范要求的同时减轻了结构的重量。周潼等[2]对遗传算法进行改进,并应用于罗氏线圈结构的设计,构建了罗氏线圈优化系统。孟建军等[3]使用模拟退火遗传(simulated annealing-genetic algorithm,SA-GA)混合算法对车辆轮重分配问题进行优化设计,并将数值计算结果与仿真结果对比,验证其理论计算结果的准确性。Wang等[4]通过响应面法建立赛车尾翼的近似模型,针对此模型使用遗传算法优化赛车尾翼的升力阻力比。龚昊[5]对差分进化算法进行改进,并对燃油转输参数进行优化设计,得到燃油转输参数最优方案。陶然等[6]采用响应面法模拟抱杆的真实响应,使用改进的算术优化算法对抱杆的响应面代理模型进行优化设计,降低了计算成本。Khodzhaiev等[7]提出二阶突变方法处理变长基因组来对遗传算法进行改进,并使用改进的遗传算法对输电塔进行拓扑、形状和尺寸优化。骆烜赫等[8]使用粒子群算法对功能梯度多级加筋圆柱壳进行轻量化设计,并进行有限元特征值屈曲分析验证此优化结果。
天鹰优化器(aquila optimizer,AO)[9]作为当前较新的元启发式优化算法,因其较好的计算能力被应用于科学研究的多个方面。Abd Elaziz等[10]将AO和深度学习相结合,用于提升2019年冠状病毒病的图像分类; Ma等[11]结合准对位学习策略和小波突变策略对AO进行改进,进行中国农村人口预测; Kharrich等[12]将AO结合算术优化算法,用于设计储能系统的微电网。上述研究表明了AO计算能力的有效性,但该算法局部搜索能力不足,易停滞于局部最优,并且在空间桁架结构优化方面的研究还有待拓展。
现针对AO较弱的局部搜索能力,使用改进型Logistics混沌映射初始化算法的种群,有效帮助算法脱离局部最优[13];引入新的平衡搜索方式,全局搜索和局部搜索得到了更好的平衡,算法迭代后期仍具有广泛的搜索能力,提升算法摆脱局部最优的能力;新的非线性参数增强算法的局部搜索能力;加入改进型反向学习策略,增加种群多样性,防止算法陷入局部最优[14]。然后将改进的天鹰优化器(improved aquila optimizer,IAO) 结合罚函数法和有限元方法对十杆平面桁架结构和抱杆结构进行优化设计。
1 抱杆结构有限元分析
1.1 抱杆简介
以白鹤滩-江苏±800千伏特高压直流输电工程中使用的750截面落地双摇臂抱杆建立有限元模型,如图1所示,抱杆结构主要包括主杆段(普通段和加强段)、摇臂段和桅杆段。回转支座,腰环拉线、调幅绳、内拉线等均为次要结构。
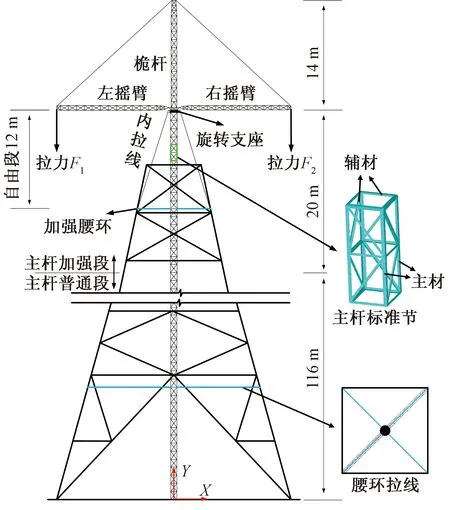
图1 抱杆整体示意图
该抱杆全高150 m,主要由抱杆主杆普通段(116 m),主杆加强段(20 m),摇臂(14 m)和桅杆(14 m)4个部分组成。抱杆主杆段和桅杆段截面为750 mm×750 mm,摇臂段截面为500 mm×600 mm,摇臂和桅杆顶部均采用变截面设计。抱杆回转支座处设置内拉线,与抱杆铅垂线的夹角为20°。抱杆自由段高12 m,抱杆与铁塔间设置9道腰环,其中第一道为加强腰环,距离第二道普通腰环为12 m,其余腰环间距小于等于15 m。
抱杆最初设计的构件尺寸如表1所示,主材采用Q345钢,辅材采用Q235钢。密度ρ=7.85×103kg/m3,弹性模量E=2.06×1011Pa,泊松比υ=0.3。

表1 抱杆各段角钢型号
1.2 抱杆有限元模型
为了方便建模,做以下约定。摇臂方位:摇臂俯视图与X轴正向所成的角度;风向:X轴负方向的风向为0°,垂直X轴的风向为90°,二者角平分线为45°方向。如图2所示。
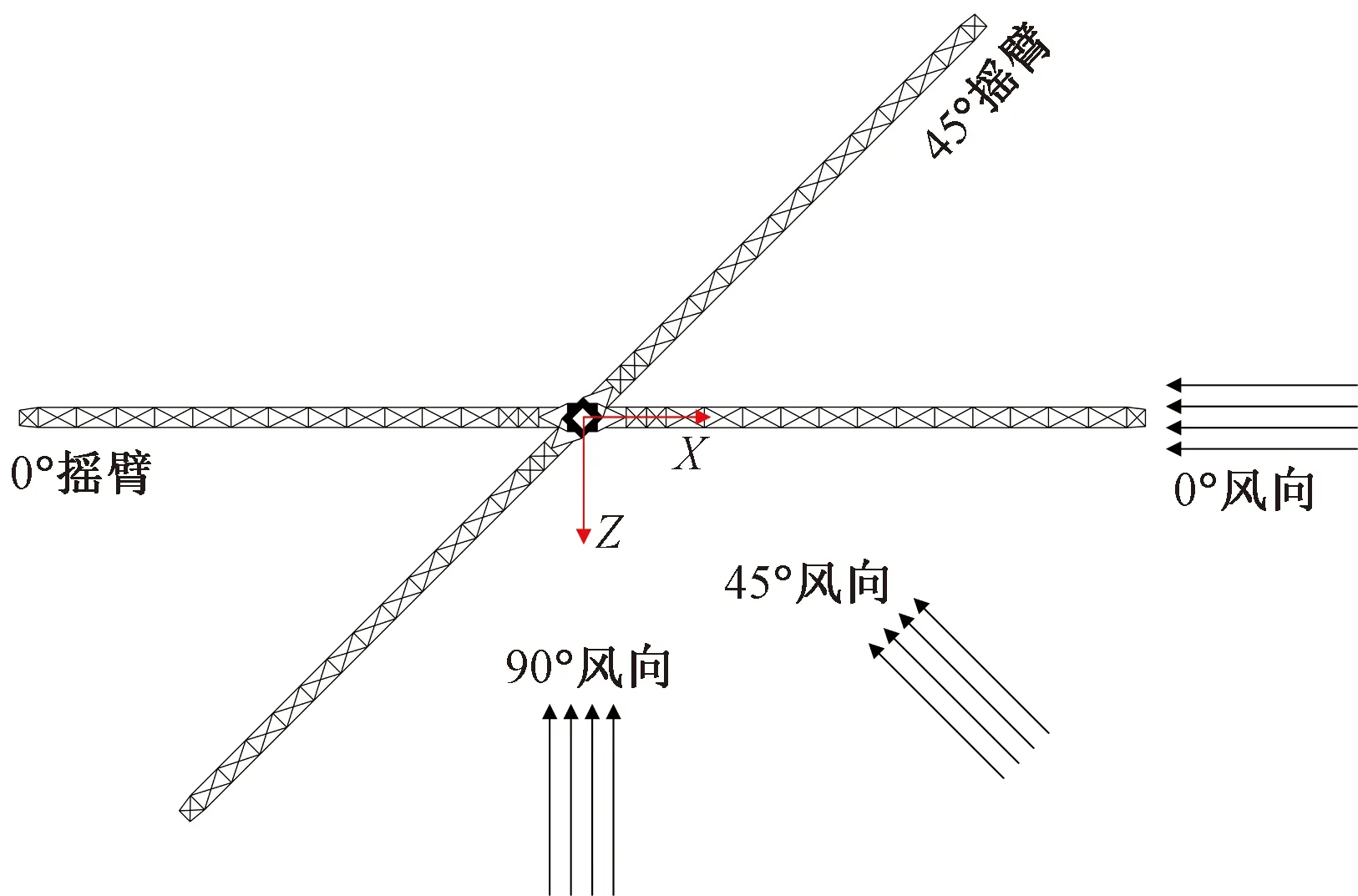
图2 摇臂方位和风载荷方向
在抱杆三维有限元分析模型中采用梁单元模拟抱杆的主杆、桅杆和摇臂;用索杆单元模拟仅受拉力的内拉线和腰环等。释放摇臂绕Z轴转动的自由度。
1.3 荷载工况
抱杆承受的主要载荷包括自重、风载荷以及吊重。抱杆一侧吊重为4 t,另一侧为3 t,45°摇臂,45°风向时为此工程中的最危险工况。吊钩重250 kg,起吊钢丝绳重500 kg;最大工作风速13.8 m/s(6级风)。
根据《起重机设计规范》(GB 3811—2008)风载荷的计算公式为
Pw=CPA
(1)
C=1.7(1+η)
(2)
(3)
式中:C为风力系数;A为迎风面积;P为风压;η为挡风折减系数,由充实率φ确定;Vs为计算风速。
1.4 有限元分析
采用有限元方法对落地双摇臂抱杆最危险工况进行分析计算,分析结果如表2所示。由表2可知,在最危险工况下,主材的最大Mises应力为158.80 MPa,辅材的最大Mises应力为115.60 MPa,两者均满足《架空输电线路施工机具基本技术要求》(DL/T 319—2018)中2倍屈服安全系数的要求;抱杆顶端最大水平位移为342.98 mm,抱杆屈曲系数为4.37,两者均满足设计要求。本文中将其作为优化工况对抱杆结构进行优化。

表2 最危险工况分析结果
2 改进的天鹰优化器
2.1 天鹰优化器
AO是Abualigah等[9]在2021年提出的一种元启发式算法,该算法模拟天鹰这种生物的四种捕猎行为产生4个迭代公式,若当前迭代次数小于最大迭代次数的2/3,使用前两个迭代公式进行全局搜索,否则采用后两个迭代公式进行局部搜索。
2.1.1 第一种捕猎行为X1(扩大探索)
天鹰在高空中广泛地探索,并通过垂直弯腰的高空飞翔识别猎物所在区域,来选择出最佳狩猎区域。该行为表示为
X1(t+1)=Xbest(t)L+[XM(t)-Xbest(t)]rand
(4)
(5)
式(4)中:t为当前迭代;T为最大迭代次数;Xbest(t)为第t次迭代之前获得的最佳解,即当前的最佳猎物位置;rand为0~1的随机值;L为随迭代次数的线性递减值。XM(t)表示第t次迭代当前解的平均值,计算公式为
(6)
式中:D表示问题的维度;N表示候选解的个数(种群大小)。
2.2.2 第二种捕猎行为X2(缩小探索)
当天鹰在高空中发现猎物区域,会在猎物上方区域盘旋,准备着陆和发动攻击。在该行为中天鹰会仔细地探索目标所在区域,从而为攻击做准备。该行为表示为
X2(t+1)=Xbest(t)Levy(D)+XR(t)+
(y-x)rand
(7)
(8)
(9)
(10)
式中:XR(t)表示第t次迭代时在种群[1,N]范围内的一个随机解;Levy(D)为Levy飞行分布函数;y和x为搜索过程中的螺旋形状参数;D表示问题维度;s=0.01;μ和υ为0~1的随机数;β=1.5;r1为1~20的固定的搜索周期数;U=0.005 65;D1为从1~D的整数;ω为0.005;θ1=1.5π。
2.1.3 第三种捕猎行为X3(扩大开发)
当天鹰确定猎物所在区域,准备着陆和攻击时,会垂直下降进行初步攻击,以发现猎物的反应。在这里,天鹰将利用选定的目标区域来接近猎物并攻击。该行为表示为
X3(t+1)=[Xbest(t)-XM(t)]α-rand+
[(BU-BL)rand+BL)δ
(11)
式(11)中:α和δ为一个确定的较小的开采调整值,值为0.1;BL为问题的下界值;BU为问题的上界值。
2.1.4 第四种捕猎行为X4(缩小开发)
当天鹰接近猎物时,会根据猎物的随机运动在陆地上攻击猎物。该行为表示为
X4(t+1)=QFXbest(t)-[G1X(t)rand]-
G2Levy(D)+randG1
(12)
(13)
式中:QF为平衡搜索策略的质量函数;G1为天鹰的各种运动,用于跟踪奔跑期间的猎物;G2为2~0的线性递减值。
2.2 改进的天鹰优化器(IAO)
2.2.1 混沌映射
AO的首代种群是以随机化方式生成。混沌映射与随机化相比,其产生的首代种群在搜索空间内分布更加均匀,帮助算法规避局部最优和算法早熟现象。毛清华等[13]提出的改进型Logistics混沌映射(improved logistic mapping,ILM)相比于经典Logistics混沌映射在初始化种群分布方面性能更佳,所以本文中使用改进型Logistics混沌映射初始化天鹰种群。计算公式为
(14)
Xij=yn(BU,j-BL,j)+BL,j
(15)
式(15)中:BU,j和BL,j分别为第j维搜索空间中的上界和下界,i∈[1,N],j∈[1,D],N和D分别为算法种群数和维度。
将得到的混沌序列[yn]代入式(15)得到天鹰种群的初始位置。
2.2.2 新的平衡搜索策略
在AO中,若当前迭代次数t≤2T/3时,算法进入全局搜索阶段,反之进入局部搜索阶段,为了更好地平衡两者,摆脱局部最优值,本文提出一种新的平衡方式,公式为
(16)
式(16)中:E为随迭代次数变化着的振荡型参数。
当E>0.2时,算法进行全局搜索,否则进行局部搜索。如图3所示,算法在迭代中期也可进行局部搜索,使得算法在搜索空间内搜索得更加彻底;在迭代后期保留局部搜索方式的同时加入全局搜索,使得算法在迭代后期仍具有广泛搜索的能力,帮助算法规避局部最优。
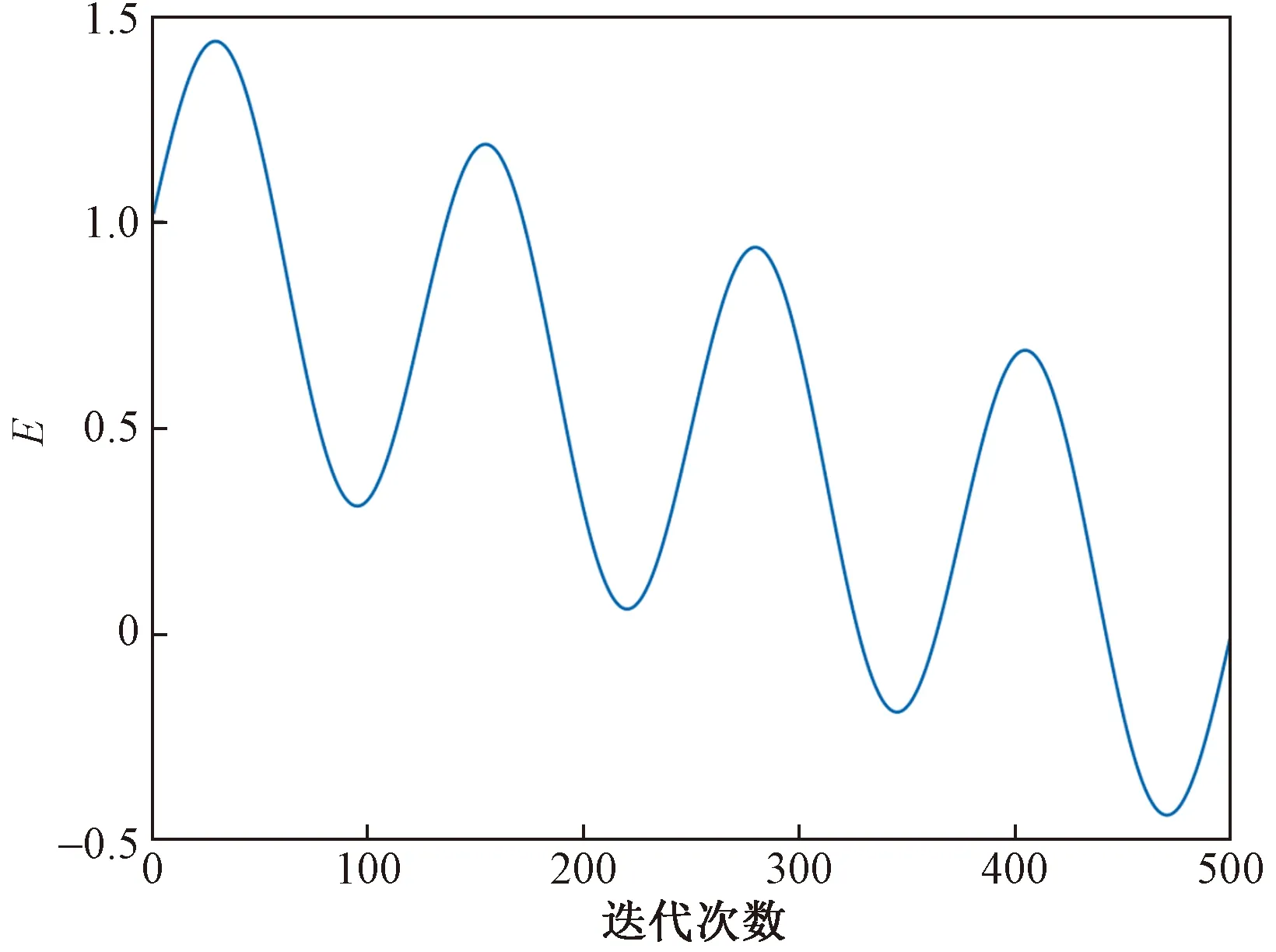
图3 E值迭代曲线
2.2.3 参数G2的调整策略
G2是一个从2线性递减到0的参数,代表天鹰跟踪猎物时从第一个位置到最后一个位置的飞行斜率。本文提出一种非线性递减参数,迭代曲线如图4所示,即将式(13)中的G2调整为
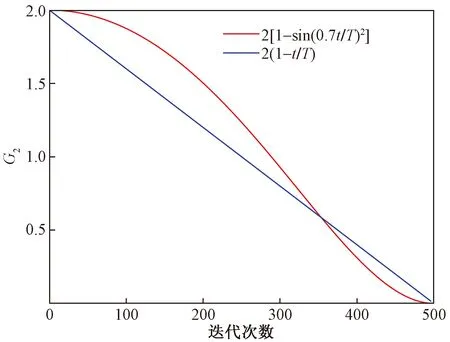
图4 G2值迭代曲线
(17)
基于新的平衡方式,算法在迭代中期就进行了局部搜索,此时改进的G2具有较大的值,使得算法更加依赖Levy飞行,从而更加彻底的搜索解的空间;在迭代后期改进的G2较小,受Levy飞行随机大范围搜索的影响小,因此上一步得到的最优解Xbest(t)和历史解X(t)将更加影响这一步的搜索结果,提升了迭代后期的局部搜索能力。
2.2.4 改进的反向学习策略
反向学习策略[15](opposition-based learning,OBL)是指在算法迭代过程中,利用当前解的位置产生一个对应的反向位置,然后比较当前解及其反向位置的适应度值,假如反向位置的适应度值优于当前解,则用反向位置代替当前解的位置,利用反向位置进入下一步的求解。
改进的反向学习[14](improved opposition-based learning,IOBL)公式为
(18)
式(18)中:xij(t)为当前解的位置;aj(t)为当前解第j维的上界;bj(t)为当前解第j维的下界;k1、k2均为0~1之间的随机数。
(19)
采用改进的反向学习策略,在算法探索阶段后产生反向位置,增加了种群的多样性,保证了算法在进行开发阶段之前拥有更好的当前解,极大地帮助算法跳出局部最优,提升算法的计算精度。
2.2.5 IAO的基本流程
IAO的基本流程图如图5所示。
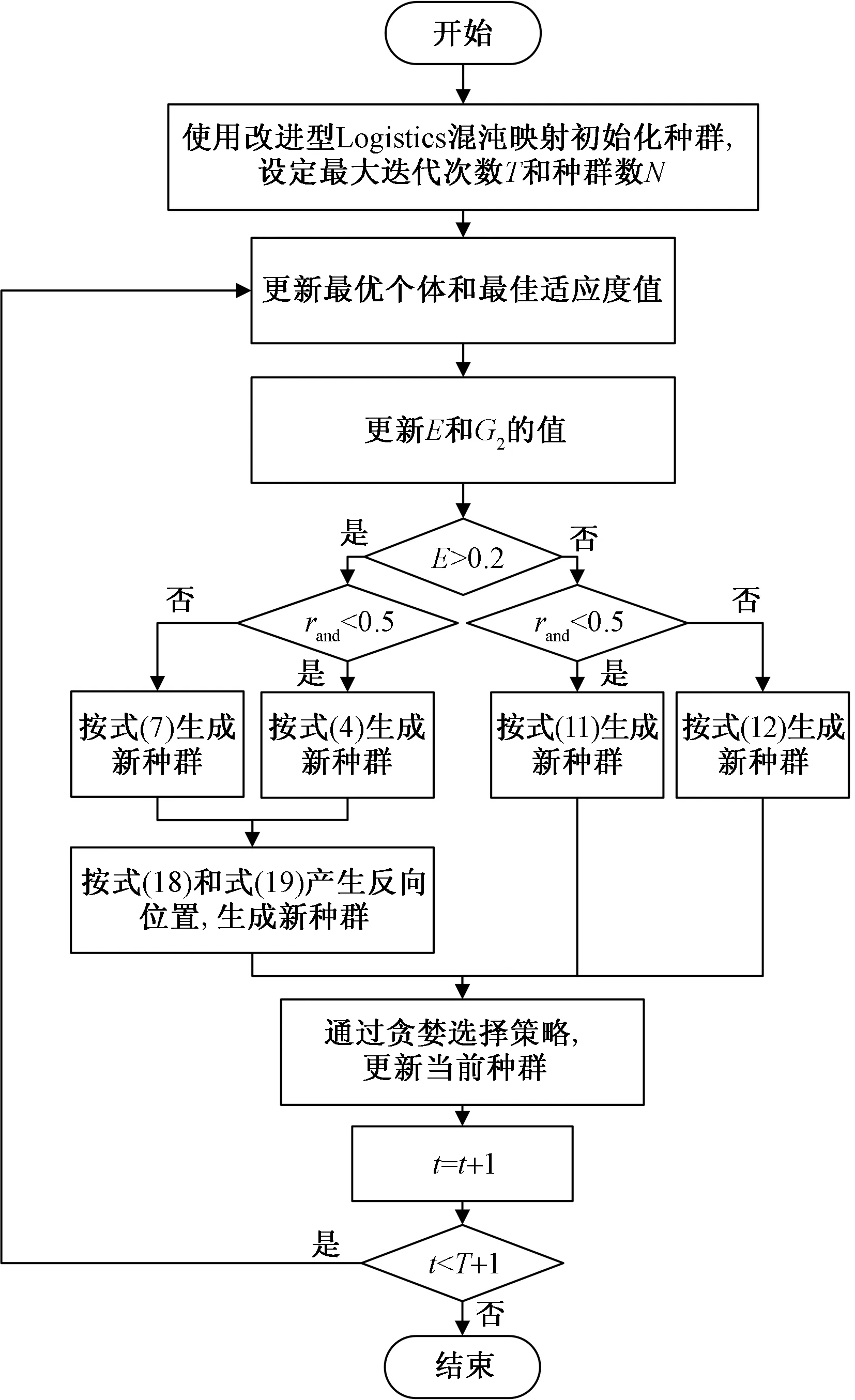
图5 IAO优化流程图
3 十杆平面桁架结构的优化
为了检验IAO在处理桁架结构离散型优化设计方面的能力,将IAO应用于十杆平面桁架结构的尺寸优化。十杆平面桁架结构如图6所示,杆件和节点依次进行了编号。所有杆件材料密度均设为0.1 lb/in3(1 lb/in3=27 679.9 kg/cm3),弹性模量为10 000 ksi (1 ksi=6.84 MPa),杆件的应力约束为25 ksi,位移约束为2.0 in (1 in=25.4 mm)。外部荷载P施加在节点2和节点4上,大小为100 kips (1 kips=4.448 kN)。将10个杆件的横截面积作为设计变量,将结构总体质量作为目标函数。优化变量从数据集S中选用,其中S=[0.1,0.5,1.0,1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0,5.5,6.0,6.5,7.0,7.5,8.0,8.5,9.0,9.5,10.0,10.5,11.0,11.5,12.0,12.5,13.0,13.5,14.0,14.5,15.0,15.5,16.0,16.5,17.0,17.5,18.0,18.5,19.0,19.5,20.0,20.5,21.0,21.5,22.0,22.5,23.0,23.5,24.0,24.5,25.0,25.5,26.0,26.5,27.0,27.5,28.0,28.5,29.0,29.5,30.0,30.5,31.0,31.5]in2,共有64种截面尺寸可供选择。
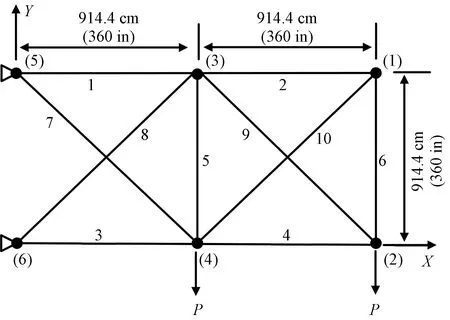
图6 10杆平面桁架结构
十杆平面桁架结构优化设计问题已被众多学者用于测试算法的寻优性能。归纳粒子群优化算法(particle swarm optimization,PSO)、含被动聚集因子的粒子群优化算法(particle swarm optimizer with passive congregation,PSOPC)、启发式的粒子群优化算法(heuristic particle swarm optimization,HPSO)和萤火虫算法(firefly algorithm,FA)的优化结果,并与AO和IAO的计算结果进行对比。设定AO和IAO的种群规模为50,总迭代次数为1 000,运行30次。优化结果如表3所示;迭代收敛曲线如图7所示。
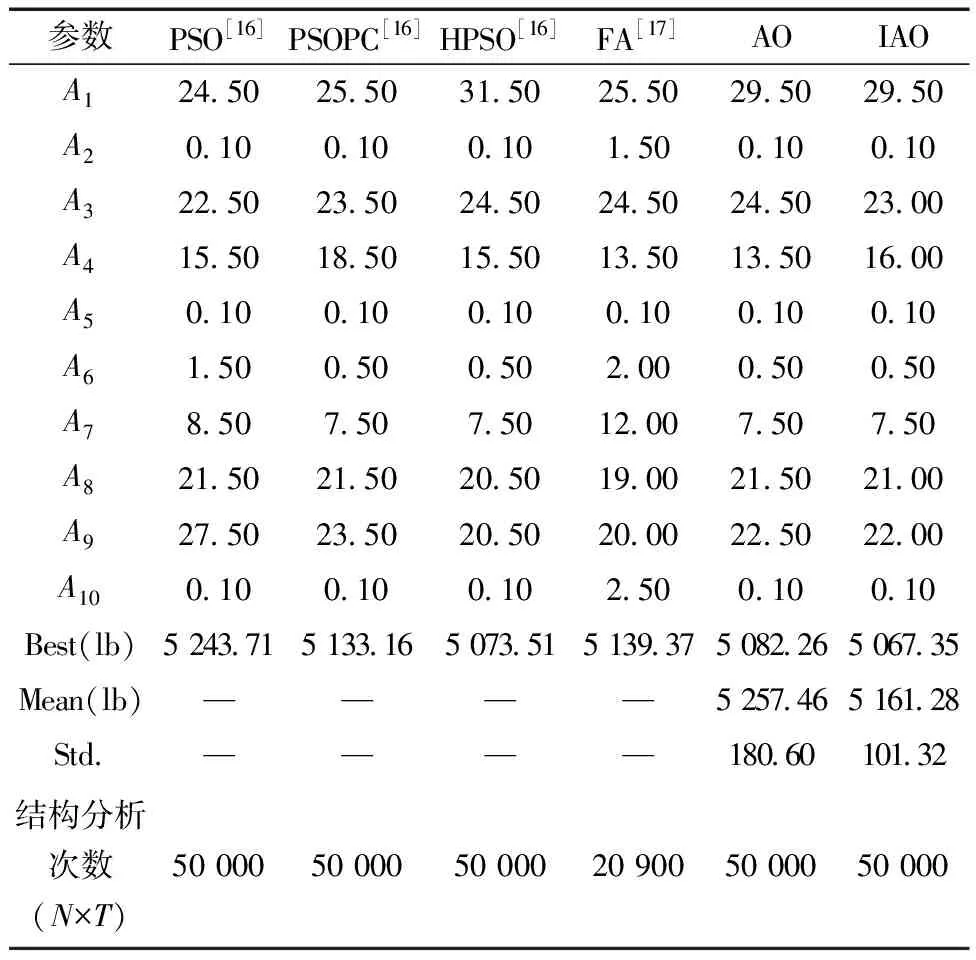
表3 十杆平面桁架优化结果对比
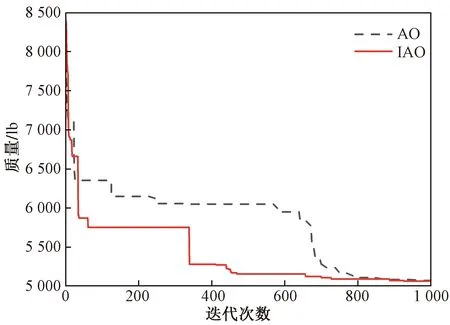
图7 十杆平面桁架结构优化收敛曲线
由表3可知,IAO优化结果是最佳设计方案,总质量为5 067.35 lb,表明IAO具有较高的寻优精度;在AO和IAO独立运行30次,结构分析次数统一为50 000次的情况下,IAO获得的十杆桁架结构质量平均值为5 161.28 lb,标准差为101.32,均比AO的计算结果小,表明改进后算法在求解稳定性方面得到了提升。为了验证IAO获得的最优解是否可行,将IAO提供的最优解代入约束函数中检查,此时节点最大位移为50.79 mm,没有违反设定的位移约束条件;杆件最大应力为169.80 MPa,没有违反设定的应力约束条件,因此IAO提供的设计方案是可行的。
图7所示为IAO在迭代前期的收敛速度要高于AO,表明混沌映射初始化种群有利于算法在设计域内快速寻优;AO在迭代至800次时陷入局部最优,反观IAO能够不断地跳出局部最优值,这是由于加入了反向学习策略和新的平衡搜索策略,使得IAO在迭代中期就可以进行局部搜索,在迭代后期也可以在设计空间进行全局寻优,提升了算法脱离局部最优值的能力。
4 抱杆结构的优化
4.1 抱杆优化模型
在有限元方法的基础上,使用IAO对抱杆结构进行优化,在满足结构承载力的情况下,寻找抱杆各部分所用角钢的最合理尺寸。以结构的强度、刚度和稳定性为约束条件;以抱杆结构各部分所用角钢主材和辅材的截面尺寸为优化变量;以抱杆整体的质量最小化为目标构建优化模型。
将抱杆结构质量记为W(x),结合罚函数法,可将优化设计的目标函数记为
(20)
式(20)中:k为约束个数;g(x)为约束函数;C为惩罚系数,当满足约束时,C=0。
以结构的强度、刚度和稳定性为约束条件为
(21)
式(21)中:σzmax为主材最大应力;[σz]为主材许用应力;σfmax为辅材最大应力;[σf]为辅材许用应力;δmax为抱杆顶部水平最大位移;[δ]为规范允许的最大位移;μ为屈曲系数;[μ]为最小允许屈曲系数。规范规定摇臂抱杆的屈服强度安全系数和稳定安全系数不小于2.0;主杆体有悬臂结构的抱杆,杆体顶部的水平位移不得超过1.34H/100(H为抱杆的自由高度,等于抱杆自由段高与桅杆高度之和)。所以抱杆主材的许用应力[σz]=172.5 MPa,辅材的许用应力[σf]=117.5 MPa;最大允许位移[δ]经计算为348.4 mm;稳定安全系数即最小允许屈曲系数[μ]=2。
4.2 抱杆结构的优化计算
根据《热轧等边角钢截面特性表》,选取边宽范围为40~110 mm的等边角钢建立截面库。以抱杆主要四个部位的主材和辅材的角钢型号为优化变量,共8个离散变量。变量从截面库中选用,截面库如表4所示。x1,x2,…,x8分别代表抱杆普通段主材和辅材,加强段主材和辅材,桅杆主材和辅材以及摇臂主材和辅材。
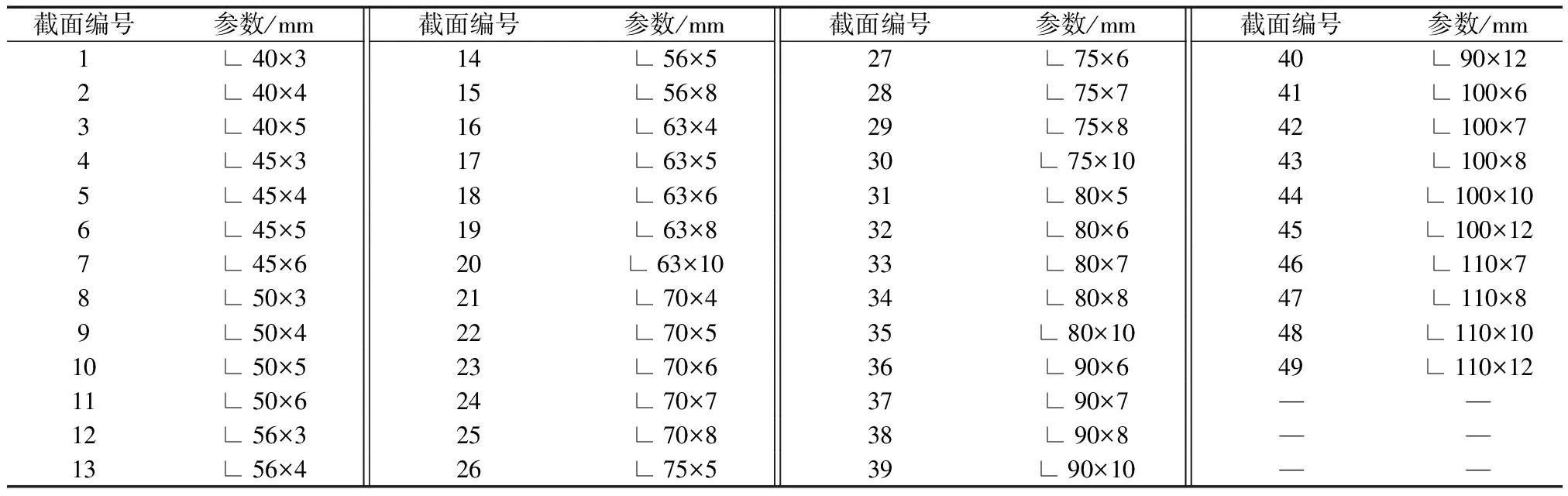
表4 抱杆截面型号库
4.3 优化结果
统一设定算法的总迭代次数T=100,种群数为10,针对此危险工况进行优化。表5给出了蝴蝶优化算法(butterfly optimization algorithm,BOA)、鲸鱼优化算法(whale optimization algorithm,WOA)、灰狼优化算法(grey wolf optimizer,GWO)、AO和IAO的优化设计结果。如表5所示,相比于其他算法,IAO找到了结果中抱杆的最佳设计方案,优化后质量为14.248 8 t,并且优化得到的抱杆均满足稳定安全系数即屈曲系数不小于2.0。如表6所示,相比于原始设计方案,IAO优化后抱杆质量减轻了16.55%。

表5 5种算法的优化结果

表6 抱杆优化前后结果对比
图8所示为5种算法对抱杆优化后对应的最大Mises应力云图。BOA和WOA优化后的抱杆最大Mises应力均发生在杆身加强段顶部主材,分别为163.67 MPa和144.48 MPa。GWO、AO和IAO优化后的抱杆最大Mises应力均发生在杆身普通段和加强段交界处主材,分别为160.19、160.42和167.84 MPa。优化后得到的五种抱杆均满足规范规定的2倍屈服强度系数。如图9所示,优化后的5种抱杆顶部水平位移均未超过348.4 mm,均满足规范规定的刚度要求。
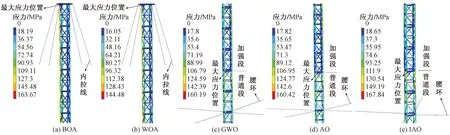
图8 抱杆最大Mises应力云图
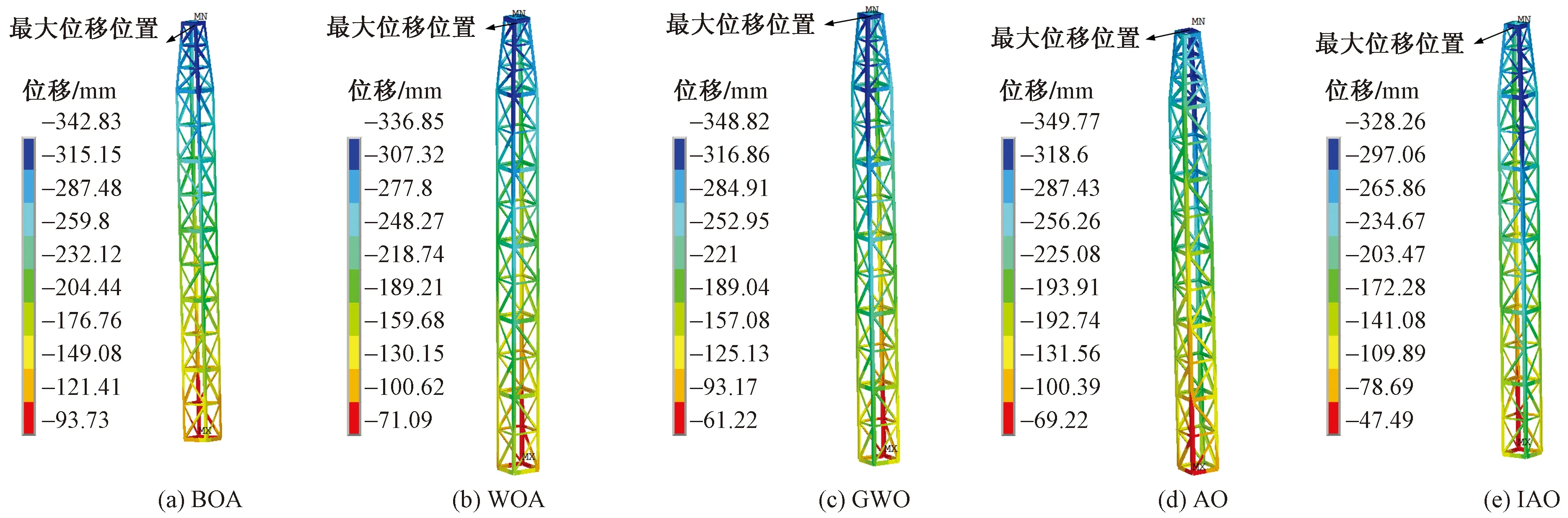
图9 抱杆顶部最大水平位移云图
图10为5种算法的迭代收敛曲线,AO在迭代20次时陷入局部最优,而IAO能够多次跳出局部最优值直至算法迭代终止,并且最终获得抱杆的最小质量。因此,IAO具有最佳的寻优性能。
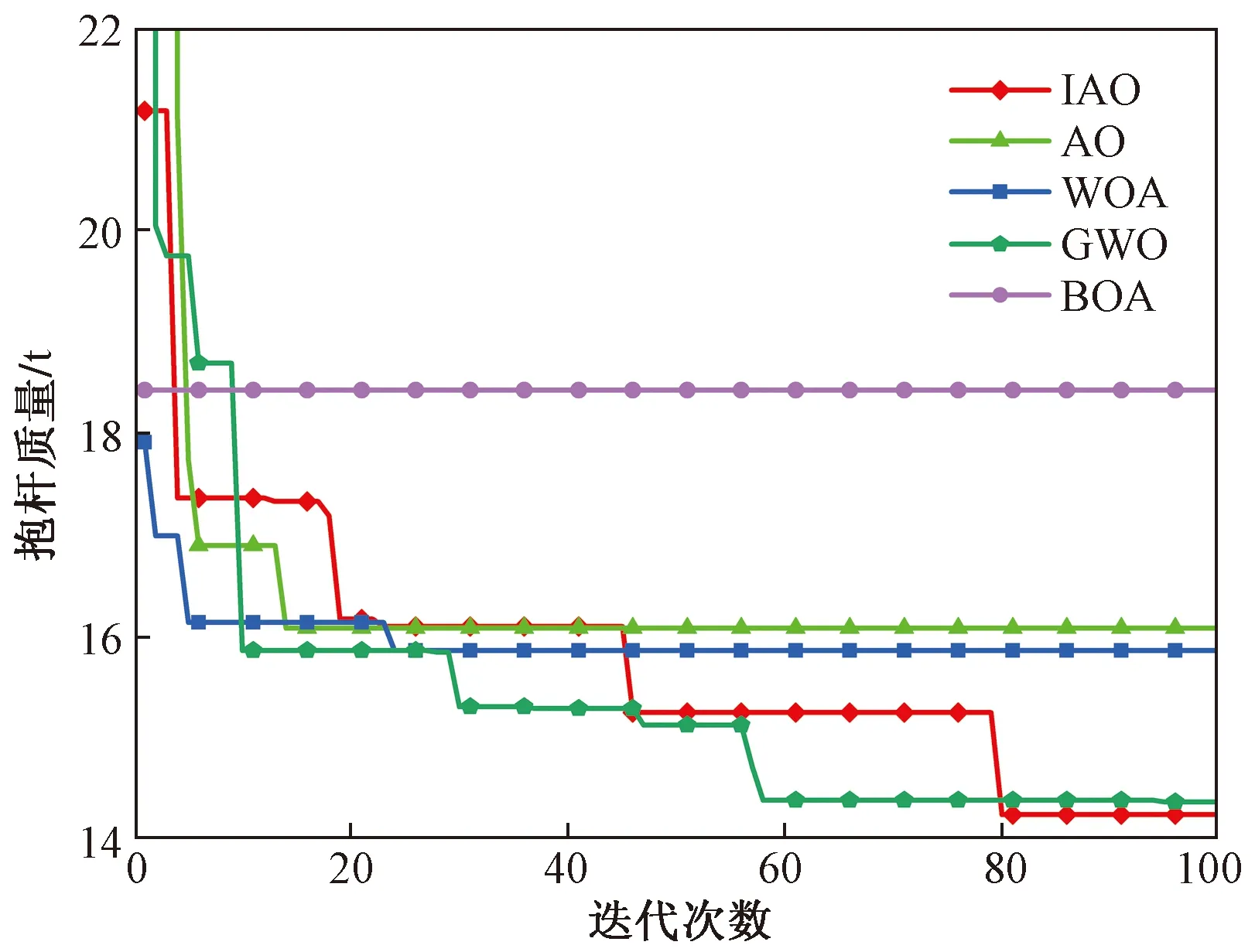
图10 算法迭代曲线
5 结论
本文提出了一种改进的天鹰优化器,结合有限元方法和罚函数法,以结构的质量最小化为优化目标,对十杆平面桁架和抱杆结构进行优化设计。得到如下主要结论。
(1)IAO在AO中引入混沌映射、反向学习策略、非线性参数和新的平衡方式,算法的计算精度和脱离局部最优的能力得到了有效提高。
(2)IAO得到了十杆平面桁架结构的最佳设计方案。IAO在寻优精度和求解稳定性方面强于AO等算法,表明算法改进策略的有效性。
(3)IAO得到了抱杆轻量化设计最佳方案,各部分所用角钢型号更加合理,抱杆结构在强度、刚度和稳定性方面均满足规范要求,抱杆整体质量由17.074 2 t降为14.248 8 t,降幅为16.55%。
(4)IAO能够有效地处理平面桁架和空间杆系结构的工程优化问题。
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
作文大王·笑话大王(2021年11期)2021-12-16
小哥白尼(军事科学)(2021年8期)2021-11-22
再生资源与循环经济(2021年7期)2021-04-09
水泥工程(2020年4期)2020-12-18
军事文摘(2020年4期)2020-05-28
河南工学院学报(2017年1期)2017-06-07
项目管理技术(2016年12期)2016-06-15
云南电力技术(2015年2期)2015-08-23
综合智慧能源(2014年10期)2014-09-11