具有大行程的步进型压电致动器研究综述
2023-10-13 09:14陈玉国王宇航
重庆理工大学学报(自然科学) 2023年9期
张 韬,马 瑞,王 阳,陈玉国,张 健,王宇航
(东北林业大学 机电工程学院, 哈尔滨 150000)
0 引言
随着微纳加工[1-3]、航空航天[4-6]及精密光学仪器[7]等领域的快速发展,使得对精密驱动技术提出了更高的要求,对分辨率的要求已经提高到纳米尺度。随着科技发展,为了满足高精度定位与驱动的要求,驱动装置在不断更新,定位精度也从毫米级升级至纳米级,甚至更高。精密驱动技术作为微纳技术的关键部分,其发展水平严重影响着微纳技术的发展。这种精密驱动与定位系统的关键在于,同时具有微/纳米级别的定位分辨率、较大运动行程以及有足够的承载能力等特点[8]。传统的驱动装置由于结构尺寸较大以及较低的定位精度导致很难应用在高精度定位领域当中[9]。
压电致动器是一种新型的致动器,可以满足精密定位系统中纳米级定位分辨率的需求。压电致动器一般基于压电元件的逆压电效应来产生位移运动,单个压电元件的工作行程只有几微米或几十微米,这极大地限制了压电致动器的应用范围。为了克服这个问题,国内外相关学者提出了各种方法使压电致动器实现大的工作行程(毫米级别,甚至几厘米)[10]。目前,根据驱动原理不同,可以将压电致动器分为直动型压电致动器和步进型压电致动器。直动型压电致动器通常利用柔性放大机构放大压电元件的输出位移,然而,放大后的行程通常为几十微米,这仍然是不够的,如果增加放大比,则会使致动器的动态性能与输出性能恶化。直动型压电致动器相对于步进压电致动器,具有输出力大、工作带宽大和连续性好的优势,但是工作行程小,限制了直动型压电致动器在未来大行程驱动领域中的应用。虽然步进压电致动器每一步的运动位移很小,但是理论上积累的位移可以达到无穷大。并且,由于单步的位移非常小,所以可以实现较高的定位分辨率,因此,步进型压电致动器在纳米定位系统中越来越受到相关学者的关注,并取得了很大进展。
本文综述了步进型压电致动器的工作原理与研究进展,对比了几种典型致动器在精密定位技术中的优劣,对几种步进型压电致动器的输出性能做出了比较,并且指出了目前存在的问题及未来的发展趋势。
1 典型高精度致动器比较
致动器是精密定位系统的核心部件,其输出性能的优劣直接影响定位系统的工作性能。常见用于高精度驱动与定位系统中的致动器包含音圈电机、直线电机、伺服电机、步进型压电驱动器以及直动型压电驱动器等。
音圈电机(voice coil motor)是一种特殊形式的直接驱动电机,因其工作原理与扬声器相似而得名。音圈电机具有结构简单、体积小、高加速度、高线性度等显著特征,在高精度定位伺服系统中得到广泛应用。其运动行程一般在毫米级别,其定位精度级别为亚微米级,如果想达到百纳米级别的定位精度,对其零件加工与安装配合等因素有极高的要求。直线电机是一种能产生直线运动的电机,可以把电能转换成直线运动的机械能,不需要任何中间传动转换装置,因此,比旋转电机经过转换装置形成的直线运动效率更高。虽然这些常规的致动器可以在一定程度上达到精密驱动和定位的目的,且具有更高的刚度和承载能力的优点,但由于摩擦、疲劳等关键因素限制了它们的应用,直线电机和音圈电机的定位精度都为亚微米级别,很难满足近些年精密驱动技术的定位精度要求[11-12]。
近年来,压电致动器作为精密定位与驱动领域的代表装置之一,越来越多类型的压电致动器被开发出来[13]。步进型压电致动器由于具有较大的定位精度、工作行程以及较小的结构尺寸,被广泛用于精密定位系统中。它还具有结构简单,能耗低,响应速度快,以及可以实现纳米级别的定位等优点,所以备受各界的关注。图1表示了3种典型致动器输出性能的比较情况[14-38]。其中步进型压电致动器是以步进运动的方式累计位移的,所以其行程理论上可以无限大。直线电机的精度为亚微米级别,其行程由导轨的长度决定。
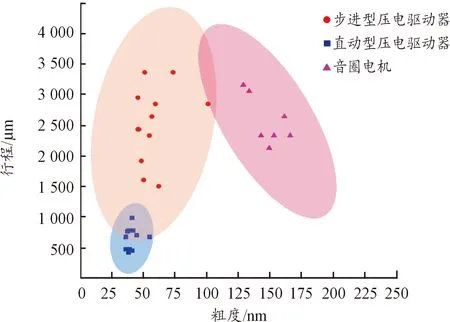
图1 典型致动器输出性能
其中步进型压电致动器包括以下3种:尺蠖型压电致动器、超声型压电致动器以及粘滑型压电致动器[39-40]。尺蠖型压电致动器是模仿真实的尺蠖的步进运动,通过夹紧单元和驱动单元之间的相互配合,实现大的工作行程。超声型压电致动器是基于逆压电效应和超声振动理论使动子产生运动的,其弹性体可被反向压电效应激励,在超声频率下产生椭圆谐振运动。粘滑型压电致动器仅通过一个定子和一个动子之间的摩擦力就能产生相对运动,从而获得较大的工作行程。本论文着重介绍以上3种步进型压电驱动器的运动原理及研究现状。
2 尺蠖型压电致动器
2.1 尺蠖型压电致动器运动原理
尺蠖型压电致动器是科研学者通过模仿自然界尺蠖蠕动爬行的运动方式设计的,自然界中尺蠖的运动方式如图2(a)所示,尺蠖的头部以及尾部起着夹紧保持的作用,而躯干部分则担当动力源,起推进作用。通过协调夹紧保持和推进的交替作用,尺蠖最终可以实现一曲一伸地连续行走运动。在尺蠖压电驱动器的机械结构中,夹紧单元代替尺蠖的头部和尾部,而驱动单元代替尺蠖的躯干部分[41]。将尺蠖的步进运动与压电技术相结合,通过驱动单元与夹持单元的交替配合,实现尺蠖型压电致动器的大工作行程,高精度及负载能力大等功能,在精密仪器和生物工程等领域被广泛应用[42]。尺蠖型压电致动器的运动原理如图2(b)所示,其填补了直动型压电致动器短工作行程的不足[43]。此外,还弥补了超声型压电致动器运动精度低、使用寿命短和传输效率低等不足[44]。
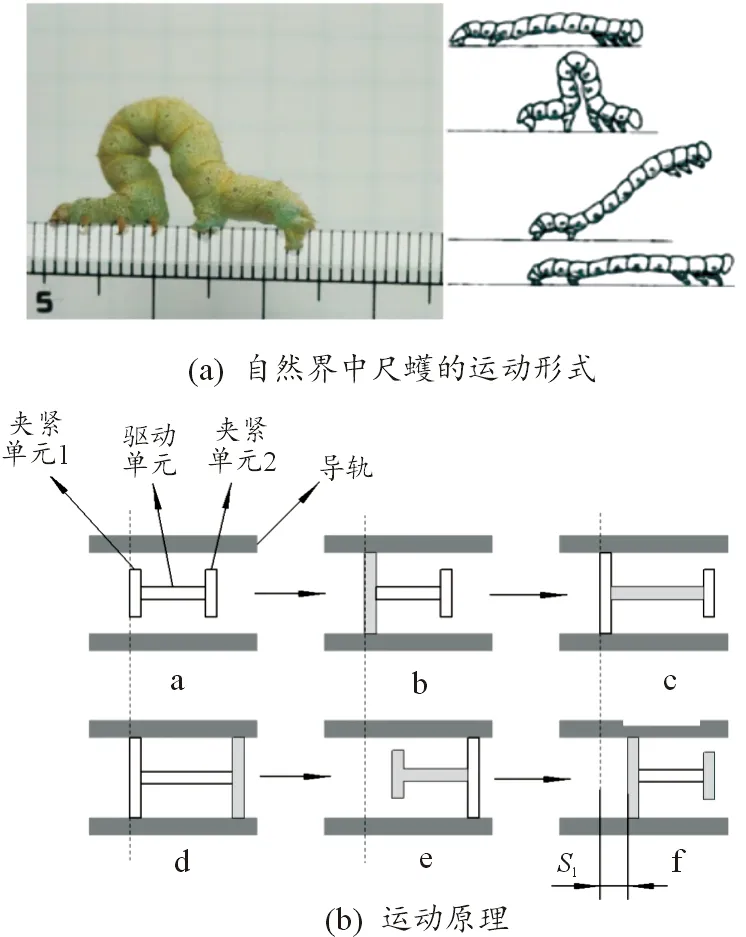
图2 尺蠖型压电致动器示意图
尺蠖型压电致动器通常由2个夹紧单元和1个驱动单元组成,其中,每个驱动单元配备1个或多个压电元件,以实现所需的单自由度运动[45-46]。尺蠖型压电致动器通过重复以下6个步骤产生步进运动:① 在初始位置,驱动单元和夹紧单元部分的压电元件都不工作,因此,夹持单元和导向器之间存在间隙;② 夹紧单元1中的压电元件通电,夹紧单元1与导轨夹紧;③ 驱动单元通电并获得动力,压电元件缓慢伸长,带动夹紧单元2向右运动;④ 夹紧单元2通电获得动力,与夹紧单元1一起夹紧导轨;⑤ 夹紧单元1断电,压电元件缓慢恢复原状,松开导轨,驱动单元断电,带动夹紧单元1向右运动;⑥ 夹紧单元1通电,与导轨夹紧,夹紧单元2断电,松开导轨,在此过程中,导向器的位置保持不动。虽然每一步的位移很小,但是重复以上6个步骤,尺蠖型压电致动器会产生步进运动[47-48]。
2.2 研究现状
1968年,第一个管状蠕动型尺蠖致动器诞生,并被应用在精密加工中的材料定位上。1972年,Galutva研制了第一个真正意义上的蠕动型尺蠖致动器,并应用于精密定位。后来的许多尺蠖型压电致动器的设计都以此为参照,图3为典型的尺蠖型压电致动器的构造示意图。使用压电堆叠可以在提升承载能力与运动速度的同时,使整体结构更加紧凑,此装置最高可达每分钟几百毫米的运动速度,定位精度达到了微米级别,对于尺蠖型压电致动器的发展有极其重要的意义[49]。
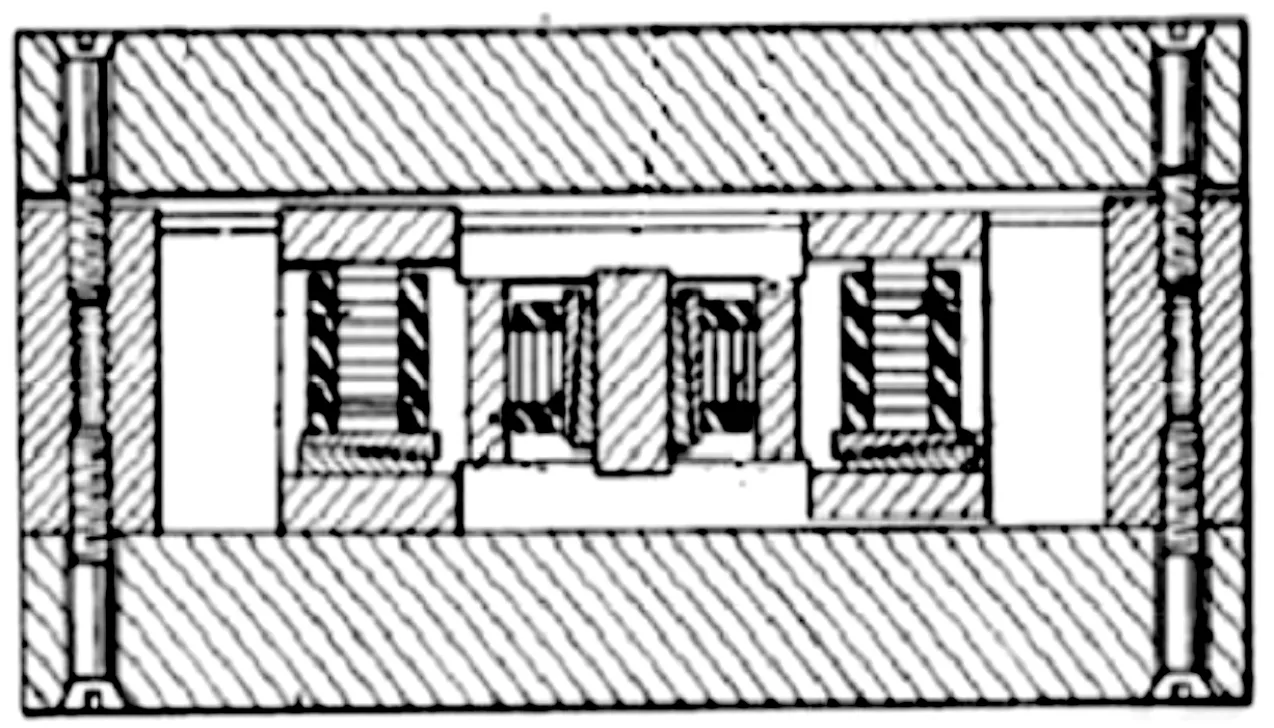
图3 Galutva蠕动型尺蠖致动器结构示意图
然而,由于当时压电材料不成熟,尺蠖型压电致动器的发展受到了很多阻碍。在随后的一段时间里,虽然有一些尺蠖型压电致动器问世,但大多都停留在理论研究上。直到20世纪80年代末,压电元件才能够提供数千牛顿的输出力,驱动电压从1×103V下降到200 V,这为压电致动器的进一步发展提供了巨大的机遇。1986年,Hara等[50]利用压电堆叠研制了一种尺蠖型压电致动器,使输入电压降到0~200 V,此后,越来越多的学者开始关注尺蠖型压电致动器的发展。
但是,尺蠖型压电驱动装置面临的一个重要问题是压电元件的输出位移很小,夹紧单元无法夹紧滑块。因此,很多学者用不同的方法对夹紧装置进行改进。柔性铰链由于具有响应速度快,无摩擦损耗等优点,被广泛应用于压电致动器的设计中,以增大压电致动器的输出位移[51]。
Yan等[14]研制了一种双向互补式尺蠖型压电致动器,其结构见图4。此装置夹紧动作由桥式机构完成,释放动作由杠杆机构完成,经过实验可得,此尺蠖型压电致动器具有双向可变的步进运动,通过逐步精细定位控制,可实现最大分辨率为1 nm。并且在此基础上研究了一种基于电压序列的变步长控制方法,此方法应用在致动器中可以调节夹紧力,在可变步长的运动中具有更高的运动稳定性和承载能力。Cai等[15]研制了一种杠杆型放大机构压电致动器的线性步进式压电平台,如图5所示。此平台使用了2个堆叠压电元件(d33模式)、2个剪切压电元件(d15模式)、2个平行的剪切压电元件产生动子运动所需的侧向运动,2个平行的堆叠压电元件作用在杠杆放大机构,以调整2个剪切型压电元件与动子之间的相对位置,从而使平台获得不同的负载能力。此平台具有纳米级别分辨率的高精度定位模式及大行程范围的粗略定位模式,使步进型压电驱动平台达到了纳米级的定位精度。Ghenna等[16]研发了一种小型化、高驱动力、高阻抗的尺蠖型压电驱动马达,如图6所示,该驱动马达由1个扩展机构和2个双夹紧机构组成,其中,双夹持机构的作用是在动子和动子之间提供较高的夹紧力(2 500 N),而扩展机构的作用是利用柔性机构放大压电元件的输出位移(自由行程下为0.01 mm)和提高夹紧力(500 N)。
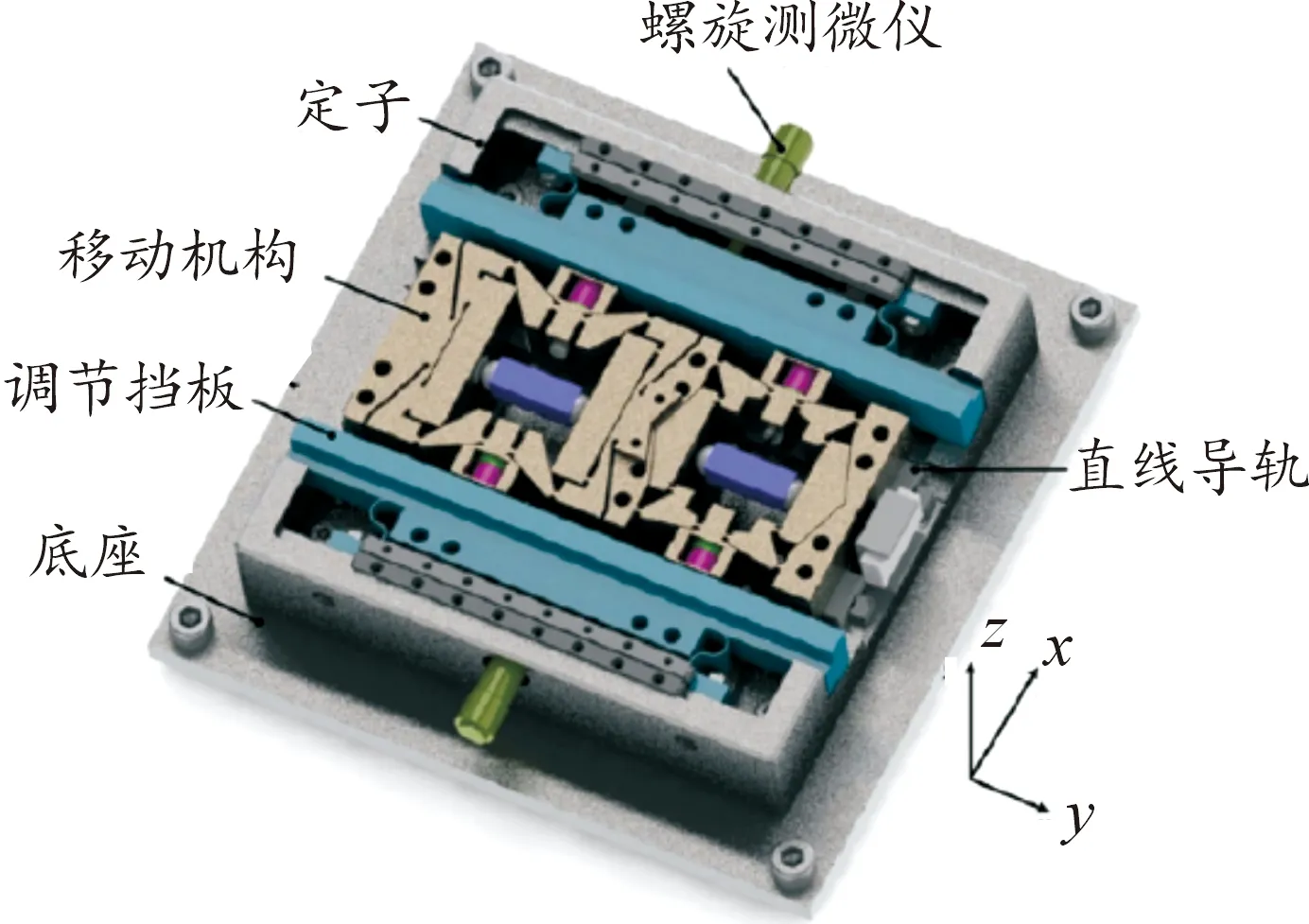
图4 双向互补式尺蠖型压电致动器结构示意图
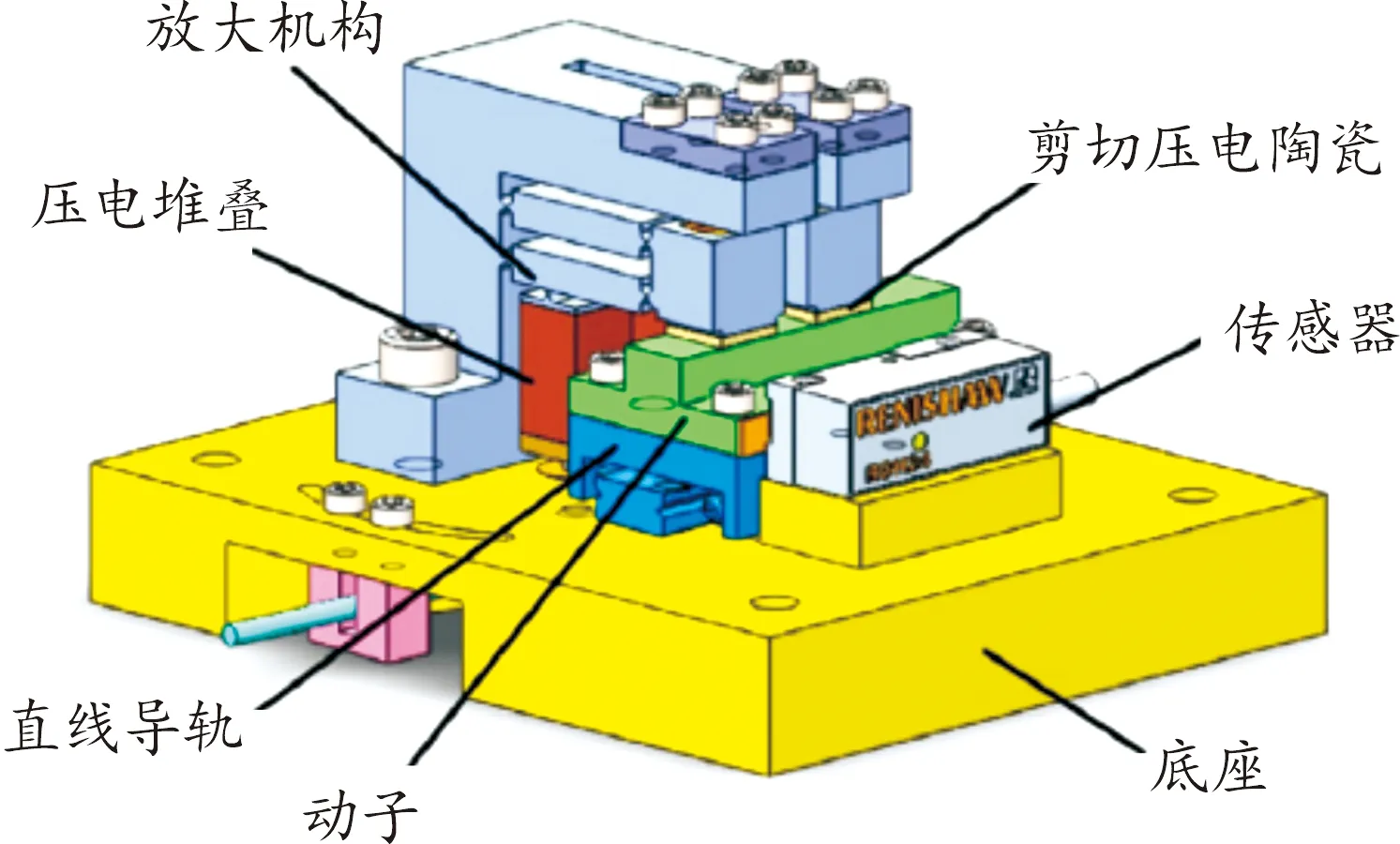
图5 线性步进式压电平台结构示意图
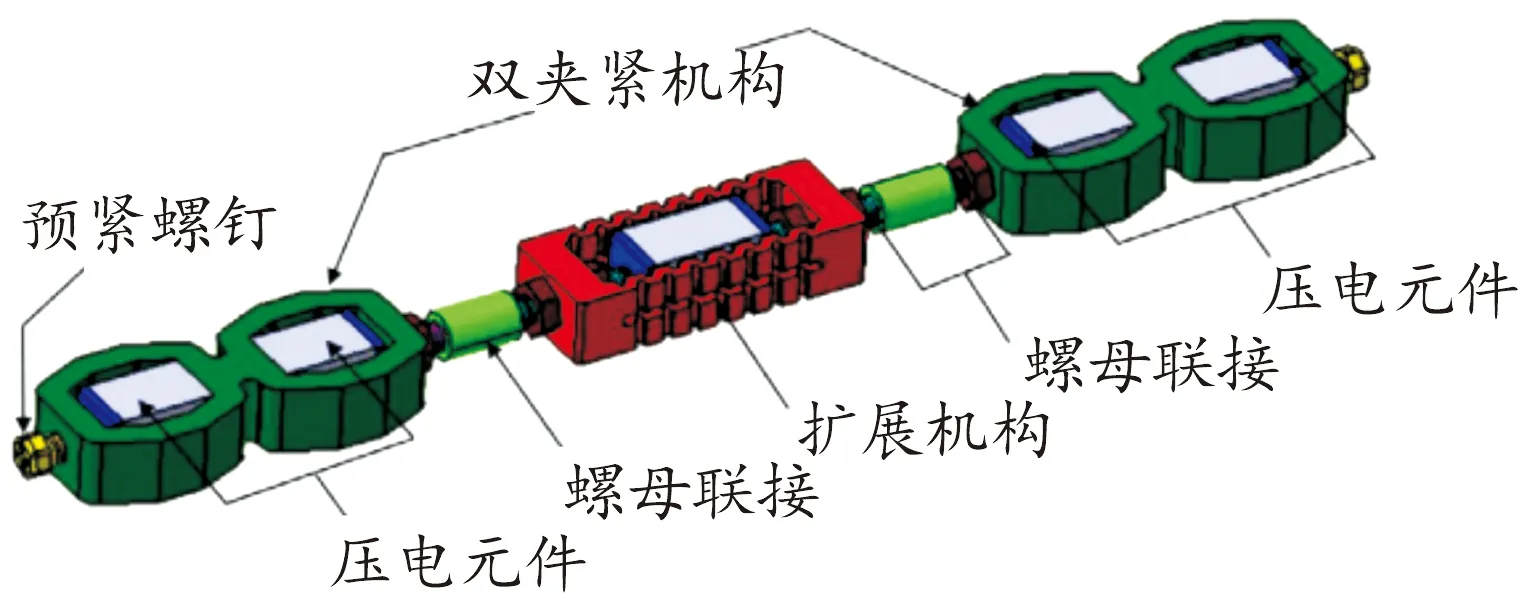
图6 尺蠖型压电驱动马达动子结构示意图
随着工业中微/纳米物体处理和纳米定位的发展,具有纳米分辨率的高精度定位是提高扫描质量和操作精度的关键技术,并在爬杆机器人[17]上显示出重要的应用前景。大多数基于电磁或静电电机的爬杆机器人普遍存在尺寸大、位移分辨率低的问题,这大大减少了爬杆机器人的工作空间,影响机器人完成检测任务的效率,使用压电致动器的机器人可以缓解这些问题。与电磁马达和气动元件相比,压电致动器具有分辨率高、结构简单、工作稳定、响应速度快、抗电磁干扰等优点,这些优点促使研究人员开发由压电致动器驱动的机器人系统。
为了解决上述爬杆机器人尺寸大和定位分辨率低的问题,Ma等[18]提出了一种基于尺蠖型压电运动的爬杆机器人,其结构如图7所示,该机器人具有负载质量高、体积小(50 mm×54 mm×86 mm)、分辨率高等优点。
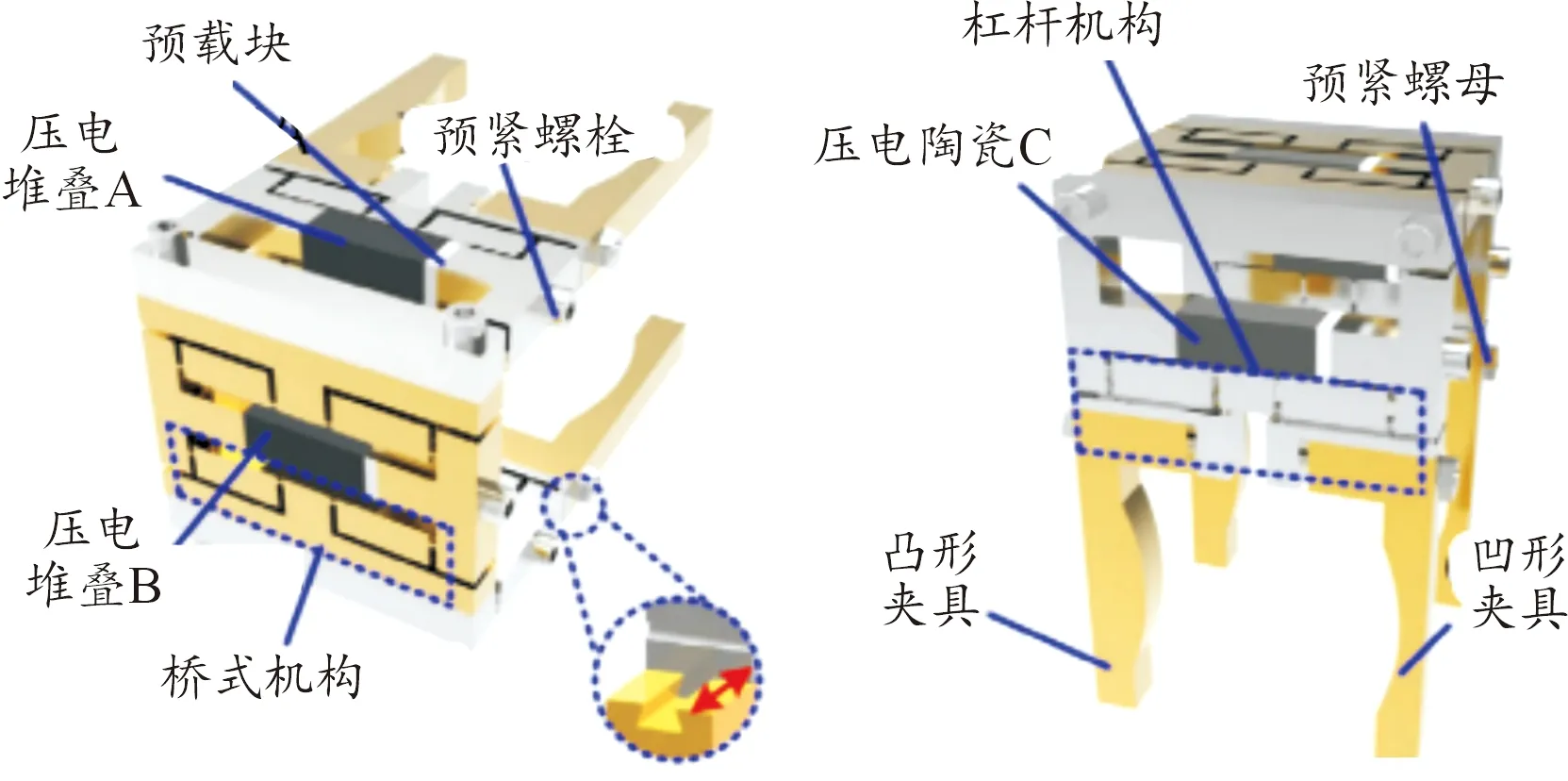
图7 爬杆机器人结构示意图
实验结果表明,此机器人在电压为150 V、频率为9 Hz的情况下,最大转速可以达到100.9 μm/s,负载质量比为1.42,位移分辨率为85 nm,此方案保证了机器人在工作时定位分辨率高,同时具有大的位移速度。为了解决尺蠖型压电致动器运动速度低的问题,该团队在2022年研制了一种双压电堆叠驱动的步进式尺蠖致动器[19],其结构如图8所示,该致动器具有承载能力大、无反向运动的特点,继承了传统尺蠖致动器的优点。此装置中每个夹紧足可以借助双菱形柔性机构,在夹紧单元和释放单元之间来回切换,并且具有大承载能力和无回退运动的特点。实验结果表明,此尺蠖型压电致动器的最大速度为471.01 μm/s,载荷为6.1 kg,输出力为11.76 N。
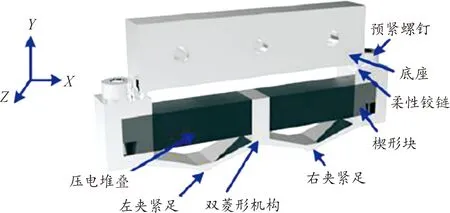
图8 步进式尺蠖致动器结构示意图
德国physik instrumente(PI)公司在尺蠖型压电致动器行业长期处于领先地位,该公司生产的尺蠖型压电致动器产品可满足10~125 mm的行程范围,如果导轨足够长,行程理论上可以无限大;其分辨率闭环工作情况下小于10 nm,开环工作情况下可达到0.02 nm左右,速度为10~15 mm/s,驱动力一般为50 N,最高可达300 N,具有良好的输出性能,同时兼具高分辨率、大驱动力、较高的速度等特点。图9所示为PI公司生产的N-331型尺蠖压电致动器(图片来源于公司官网)。

图9 PI公司生产的尺蠖型压电致动器产品实物图
国内制作基于尺蠖原理的压电致动器的厂家有哈尔滨芯明天科技有限公司,其生产的N31系列高精度直线压电马达运动平台的行程有25、50、100 mm三种规格;主动推拉力可达30 N,最大运动速度可达10 mm/s,闭环分辨率一般<10 nm,开环分辨率<0.1 nm。图10所示为该公司生产的N31型尺蠖压电致动器(图片来源于公司官网)。
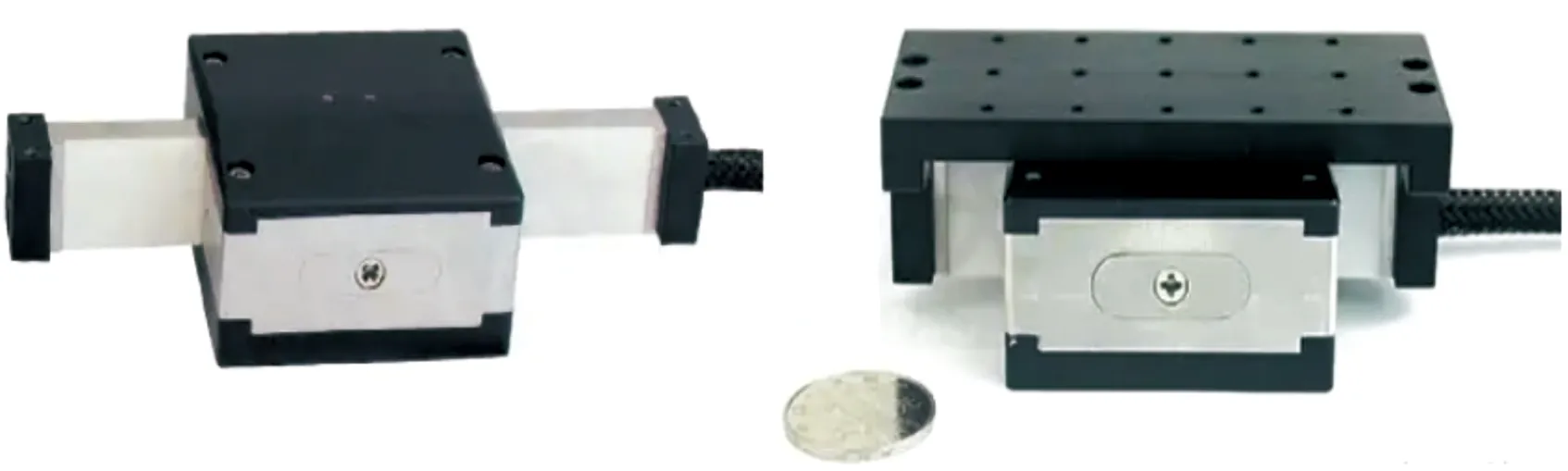
图10 芯明天公司生产的尺蠖型压电致动器产品实物图
综合以上研究工作,尺蠖型压电致动器是采用自然界中的尺蠖运动模拟的仿生设计理念,通过多个驱动单元与夹持单元相互配合、交替运动,实现大行程、高精度的连续运动输出[52-53],还具有输出能力强等优点。然而,尺蠖型压电致动器通常结构比较复杂,有多个压电元件,应用时有制造、装配及控制等方面的困难,在以后的研究中,应予以改善和解决。
3 超声型压电致动器
3.1 超声型压电致动器运动原理
超声型压电致动器也被称为超声电机或超声马达,是利用压电材料带动弹性体在超声频段内产生震动,通过定子与动子之间的摩擦产生运动。与电磁马达相比,具有控制精度有高、响应快[54-55],功耗低、不受电磁干扰[56-57]等优点。
超声型压电致动器根据超声波传播的方式可分为驻波型和行波型。如图11(a)所示,驻波型压电致动器的驱动原理是通过电信号激发2个相互垂直的压电元件高频振动,使弹性体做椭圆轨迹运动,带动动子进行移动。在从A到B的过程中,弹性体接触到动子,带动动子运动。从B到A的过程,弹性体不与动子接触,不会使动子移动,这是一种间断性的驱动模式。如图11(b)所示,行波型超声压电致动器的驱动原理是通过多个压电元件协调运动,使定子表面的每个点都按照椭圆的轨迹运动,进而推动动子进行移动,这是连续性的驱动模式[58]。

图11 超声压电致动器的驱动原理示意图
3.2 研究现状
1961年,第一台超声型压电致动器由美国宝路华公司研制并实际应用成功,用于驱动钟表内的齿轮运转带动指针旋转。在1978年时,Vasiliev等利用压电材料的超声换能原理成功研制了一种新型的超声型压电致动器,提高了超声型压电致动器的负载能力与输出功率,但是其输出性能不稳定,不能广泛应用。随后Sashida设计了一种驻波型超声波压电致动器,又在1982年研发了行波型超声波压电致动器,改变了驻波型超声波压电致动器中定子与转子接触点固定不变的工作环境,显著改善了二者之间的摩擦磨损情况。
2021年,Ryndzionek等[20]对多个单元的超声压电马达进行了研究,将旋转模式电机与行波电机的拓扑结构结合起来(结构如图12所示),在超声频率为24.4 kHz时,驱动转矩可达到68 mN·m,电机速度可达42 r/min,通过多次对比实验,得到使用材料为铝的定子结构会使多单元超声压电马达具有更好的输出性能,最大扭矩提升了13%,定子制造成本降低了41%。Wang等[21]研发了一种具有纳米分辨率的超声型悬臂压电电机,电机的三维模型如图13所示。
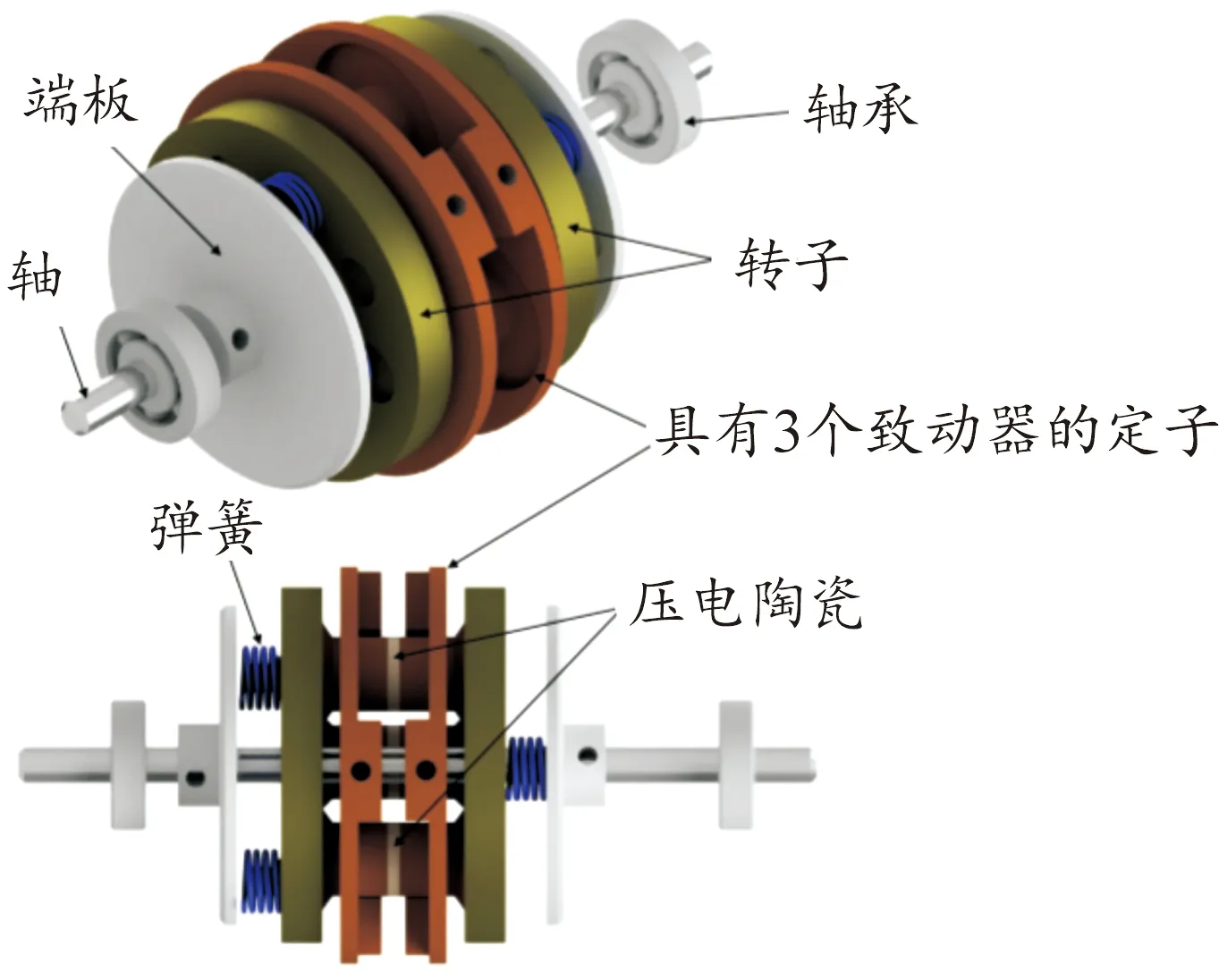
图12 超声压电马达结构示意图
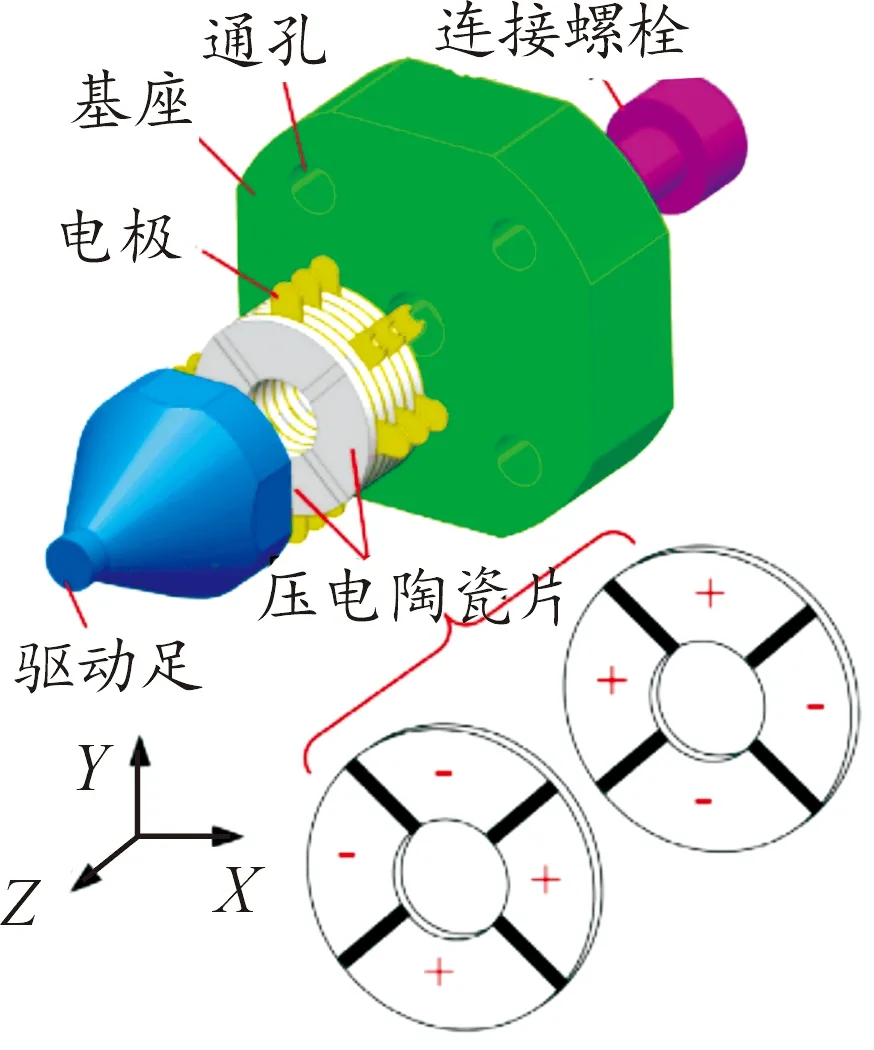
图13 超声型压电电机的三维模型示意图
采用3个正交的第一弯曲震动模式,在驱动尖端形成椭圆运动来形成滑块,该电机的总尺寸为30 mm×30 mm×34.2 mm。实验结果显示,当频率和电压分别为22.7 kHz和200 Vp-p时,该电机的输出速度为344.35 mm/s。在电压为100 Vp-p,预加载在50 N的情况下,测试了最大输出力约为8 N。此外,在谐振工作状态下,该压电电动机的高位移分辨率为48 nm。Zhang等[22]研制了一种微型驻波直线超声电机,如图14所示。该电机利用一阶纵向震动模式与二阶弯曲震动模式耦合原理,以固定频率实现双向驱动。此电机可产生81.1 mm/s的线速度及5.7 gf以上的驱动力,输出性能较好。
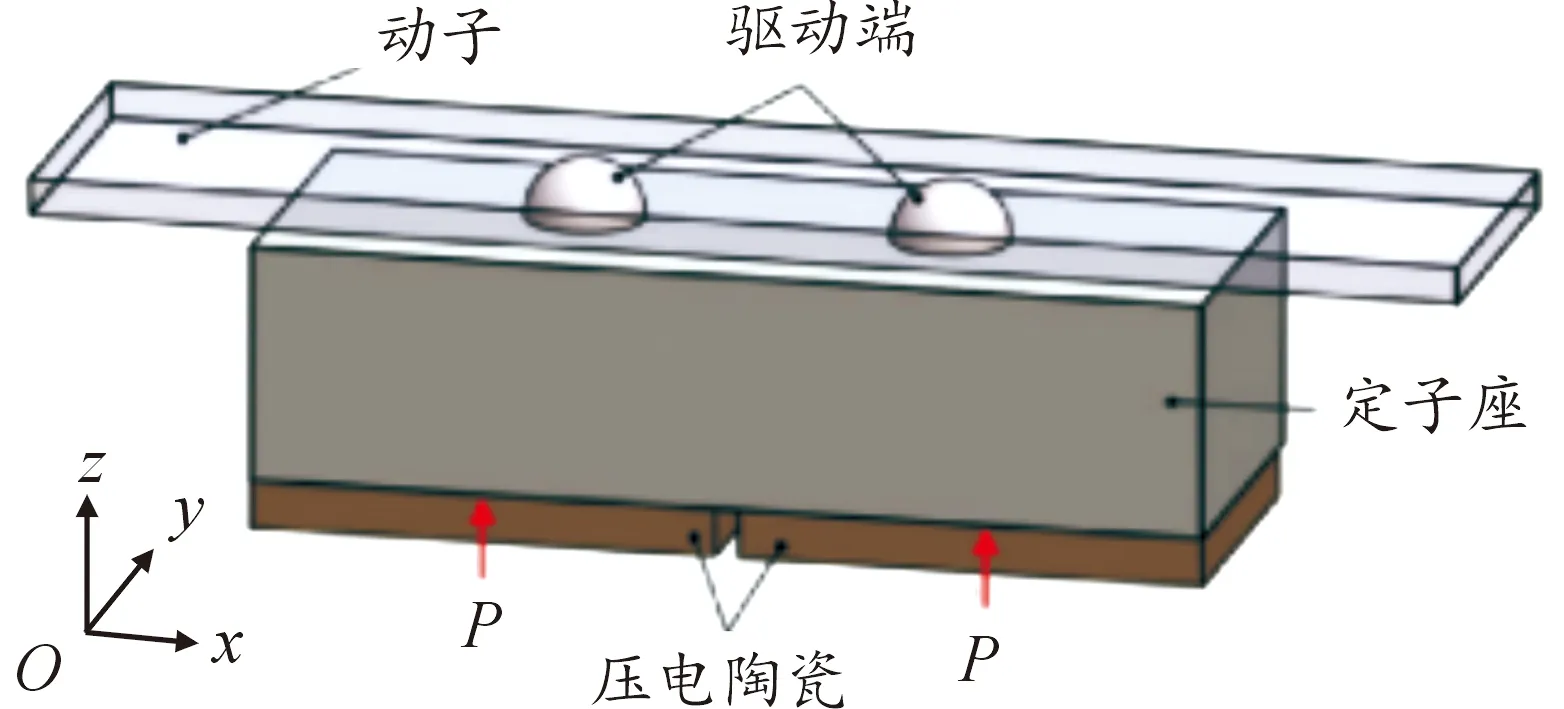
图14 微型驻波直线超声电机结构示意图
Wu等为了解决传统旋转电机[23]中使用的振动模式和驱动结构难以实现高扭矩密度和高功率密度这个问题,研制出了一种以扭转/弯曲为工作模式的超声棒状转换器,如图15所示[24]。
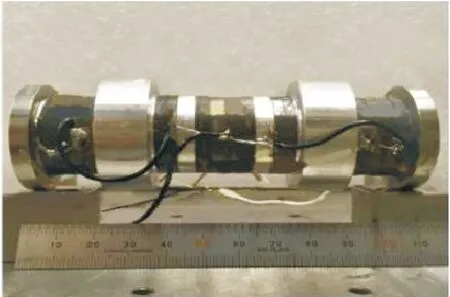
图15 大功率超声电机实物图
通过实验验证,在频率为21.64 kHz时,最大转矩和最大输出功率分别达到10.1 N·m和38.1 W。同时,它产生的转矩密度和功率密度分别为20.0 N·m/kg和75.7 W/kg。此团队为了提高超声马达的扭矩密度/功率密度,提出了一种纵向行波和弯曲行波混合激励的驱动方法,并成功应用于十字形、2自由度直线超声电机中,如图16所示[54]。通过实验得到,此装置在X轴上产生的最大推力为84.3 N,空载运行速度为 1 562 mm/s,最大输出功率为33.2 W;在Y轴上的最大推力为86.2 N,空载运行速度为1 531 mm/s,最大输出功率为34.1 W。驱动力密度为 78.4 N/kg,功率密度为31 W/kg,均优于传统的两自由度超声直线电机。
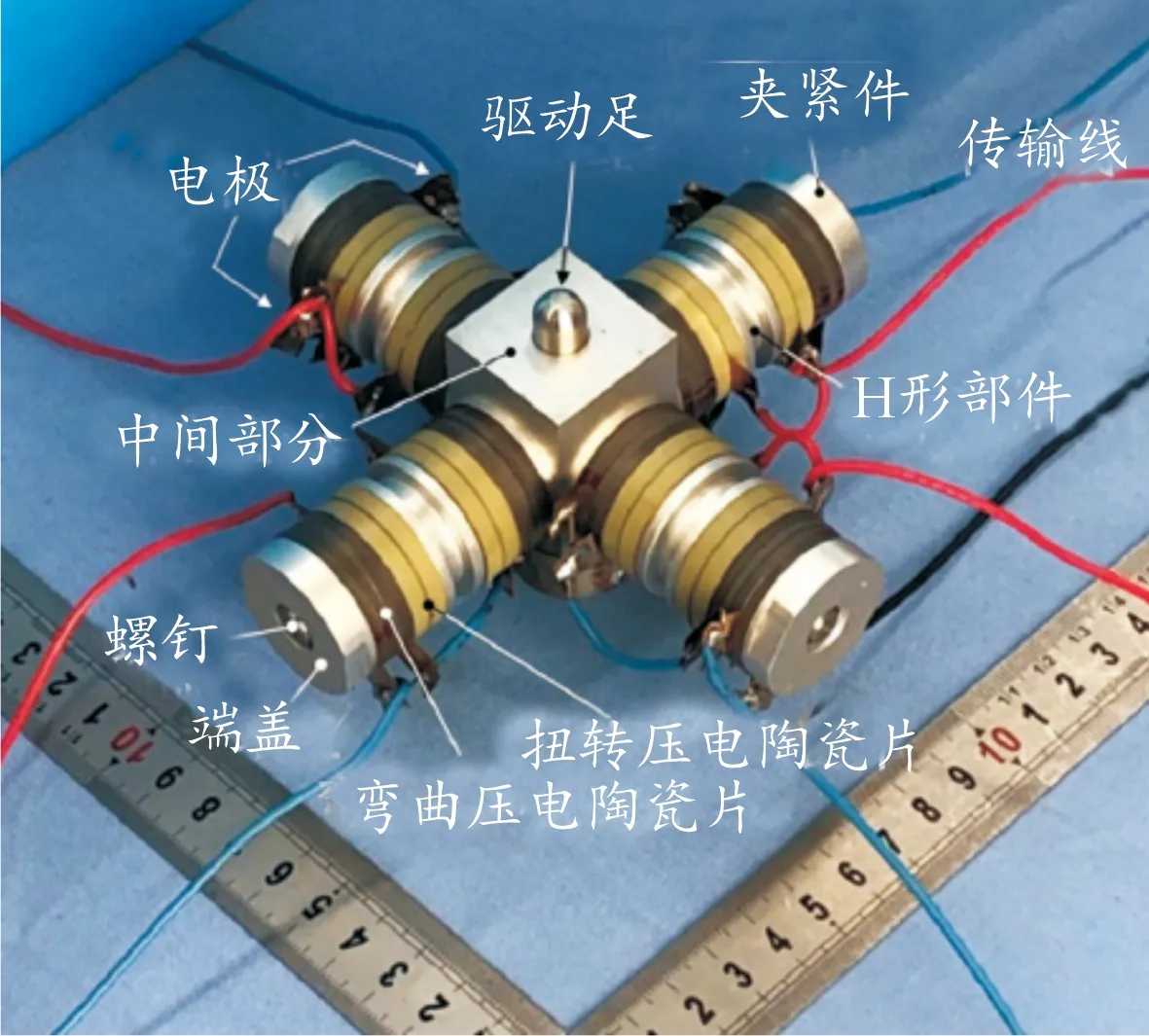
图16 压电直线超声电机实物图
超声型压电致动器通过它们的谐振工作状态驱动动子获得高速运动[59]。Yun等[61]的开槽型超声波电机的最大速度为1.12m/s。Liu等[62]设计了一种使用弯曲换能器的超声波电机,并获得了1.527 m/s的高速度。需要注意的是,在超声型压电致动器中,谐振频率的匹配是一个必不可少的过程,这使得超声型压电致动器的设计过程非常复杂。超声型压电致动器还存在严重的磨损和发热问题,这意味着超声型压电致动器不能长时间连续工作[60]。Li等[63]研究了超声波电机的热特性,并发现当电机运行20 min时,温度上升超过70 ℃。
德国的physik instrumente(PI)公司制造的超声型压电致动器输出性能较高,直线型的驱动器分为紧凑型线性平台(一维)和紧凑型XY位移平台(二维)。其中一维运动平台的行程有18 mm和22 mm,负载为2 N,速度为200 mm/s。二维运动平台在X、Y方向上的位移最大可达到25 mm,速度最大为100 mm/s。负载能力最大为50 N。图17所示为PI公司生产的超声型压电驱动器(图片来源于公司官网)。
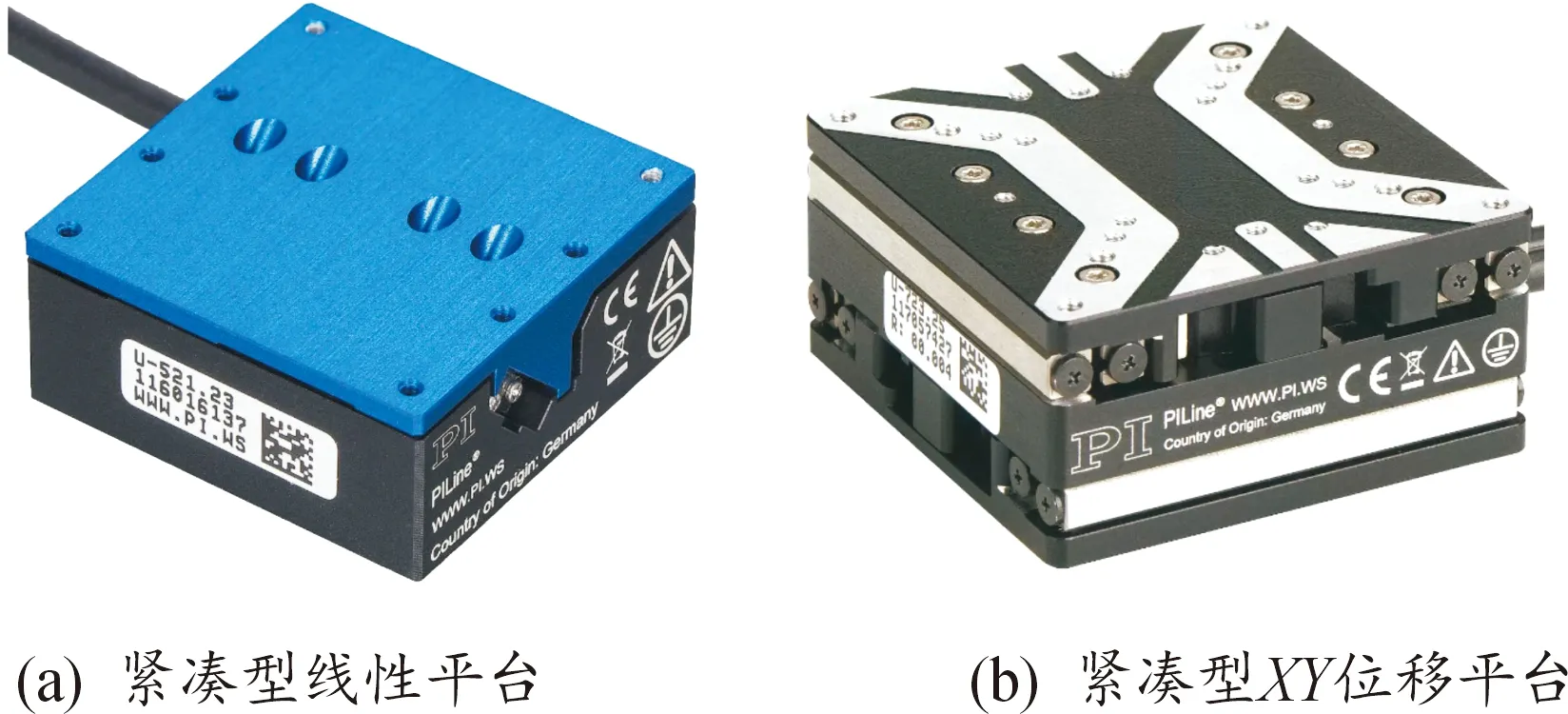
图17 PI公司生产的超声型压电驱动器实物图
国内也有很多企业投身于超声型压电驱动器的研究与制作,其中,上海虹渐光电科技有限公司的产品性能较好,该公司生产的XLS-1、XLS-3、XUMU超声压电线性平台有非常不错的输出性能,其行程一般为10~25 mm,最大可达到300 mm,双向定位精度达到±2.5 μm,最大负载可达5 N,速度范围为200~1 000 mm/s。图18为该公司生产的超声型压电致动器(图片来源于公司官网)。
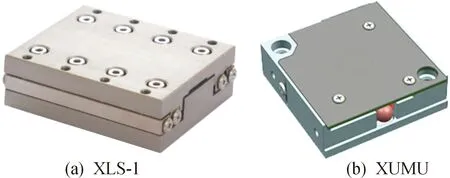
图18 上海虹渐光电科技有限公司生产的超声型压电驱动器实物图
综上所述,超声型压电致动器的研究趋向于小型化和高输出性能。目前,超声型压电致动器是利用压电材料的高频振动,使机械结构定子产生共振,但由于致动器定子的高频震动,使得摩擦损失严重且发热量大,影响电机使用寿命[64]。
4 粘滑型压电致动器
4.1 粘滑型压电致动器运动原理
粘滑型压电致动器是利用摩擦力和惯性实现步进运动的,按照驱动力的来源,可分为摩擦驱动型和惯性驱动型。
4.1.1摩擦驱动型
摩擦驱动型是利用摩擦力驱动动子,驱动原理如图19左侧所示[65]。
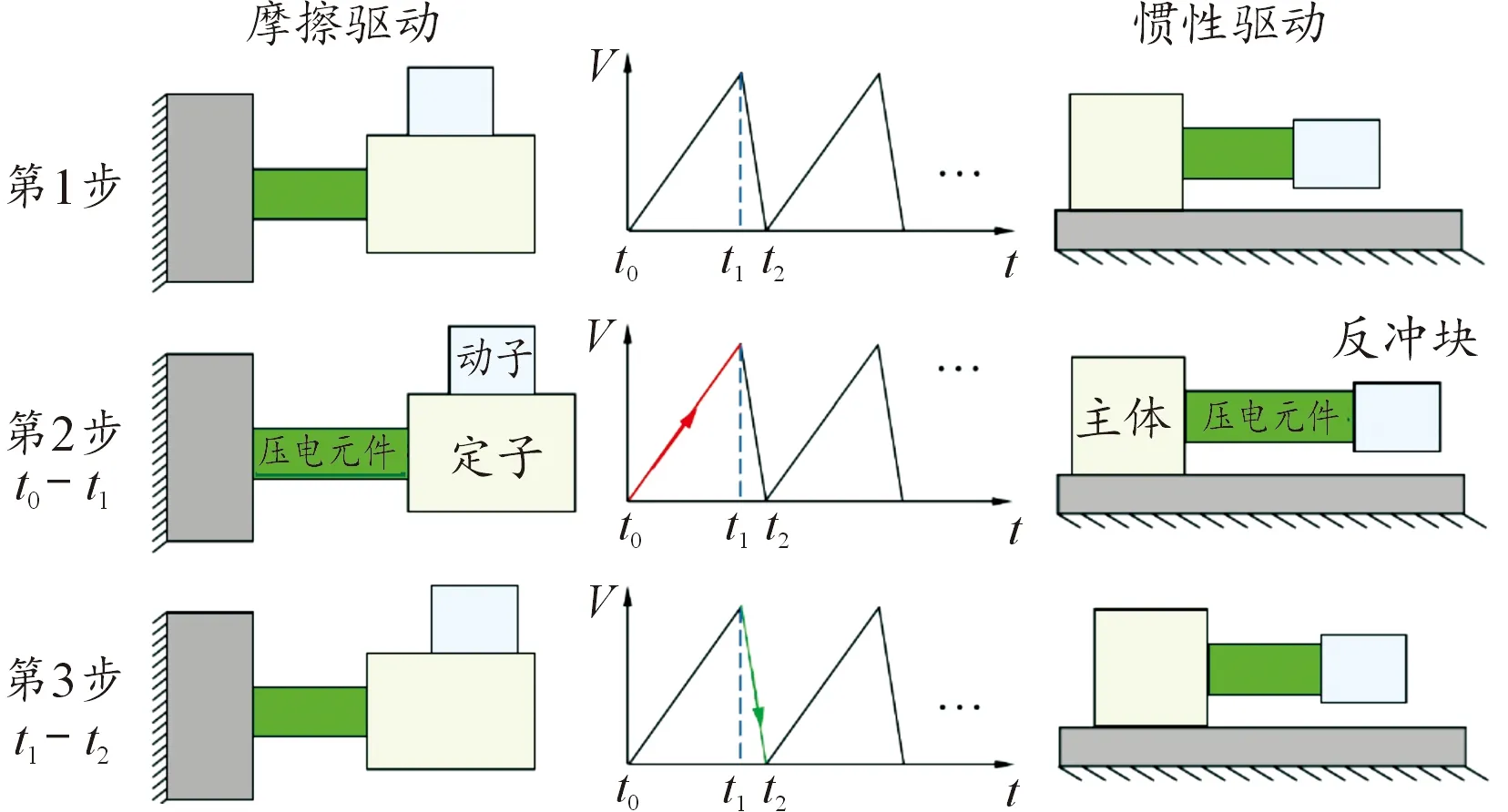
图19 摩擦驱动与惯性驱动原理示意图
整个装置可分为压电元件、定子、动子3部分,压电元件一端固定,另一端与定子连接,动子与定子间形成摩擦副。压电元件受电压信号控制,常用的压电信号为锯齿波信号。摩擦驱动型压电致动器的具体运动原理如下:
初始阶段(t0阶段):在没有驱动电压信号的情况下,压电元件和被驱动的滑块保持静止;
“粘”阶段(t0-t1阶段):在一个缓慢上升的电信号作用下,压电堆叠缓慢伸长,带动摩擦杆移动,由于滑块和摩擦杆之间存在静摩擦力,所以摩擦杆会带动滑块同样产生一个位移;
“滑”阶段(t1-t2阶段):电信号急速下降,压电堆叠具有响应速度快的特点,立即发生快速的收缩,恢复原状,由于惯性力的作用,滑块并不会随着摩擦杆运动,但是滑块和摩擦杆之间存在滑动摩擦力,摩擦杆会带动滑块产生回退位移。
最终驱动信号降到0时,压电元件缩回至初始状态。
综上所述,驱动信号一个周期会带动滑块产生一个步进运动,重复以上步骤,可以实现粘滑型压电致动器在宏观上的连续位移输出,即使每一步的位移非常小,但多次重复,理论上的行程可以无限大。如果要使滑块向相反的方向移动,驱动信号的形状应该相反。
4.1.2惯性驱动型
惯性驱动型与摩擦驱动型稍有不同,其驱动原理如图19右侧所示[66]。惯性驱动装置主要由主体、压电元件、反冲块3部分组成。压电元件一端连接反冲块,另一端连接主体,运动过程如下:
初始阶段(t0阶段):驱动电压幅值为0,整个机械系统静止;
“粘”阶段(t0-t1阶段):驱动电压由0逐渐增加至峰值,压电元件也随电压变化而逐渐伸长并将反冲块推离主体,主体受到的推力小于与承载面的最大静摩擦力,所以主体仍然保持不动;
“滑”阶段(t1-t2阶段):驱动电压由峰值迅速降低至0,压电元件则在电压控制下快速缩短,同时拉近主体和反冲块,若反冲块的惯性力大于主体与承载面的最大静摩擦力,则主体与承载面产生相对位移。
重复以上步骤,实现主体相对于地面的步进运动。在摩擦驱动型结构中,末端致动器的致动运动是由摩擦力产生的。在惯性驱动型结构中,末端致动器的致动运动是由惯性力产生的。
这2种驱动结构之间存在一些差异:
1) 由于最大静摩擦力的限制,摩擦驱动型压电粘滑驱动装置的驱动力比惯性驱动型压电粘滑驱动装置的驱动力大;
2) 摩擦驱动型结构的分辨率取决于压电元件和静摩擦力。惯性驱动型结构中的分辨率取决于压电元件和滑动摩擦力。但是,滑动摩擦力比静摩擦力更复杂。在不应用控制算法的情况下,摩擦驱动型结构的定位精度高于惯性驱动型结构;
摩擦驱动型结构中的压电粘滑致动器的行进距离受限于驱动对象的尺寸,而惯性驱动型结构中的压电粘滑致动器的行进距离在理论上没有限制,由于冲击原理使压电致动器具有精确运动的能力而受到重视,同时具有高分辨率、结构简单、易于小型化和集成等特点。
4.2 研究现状
第一代冲惯性驱动型压电致动器由Hu等[67]在1987年首次提出,还介绍了冲击驱动作动器定位系统的运动原理,制造了几个原型,验证了冲击驱动运动原理的可行性[68-69]。此后,许多研究人员对冲击驱动压电致动器的发展表现出了浓厚的兴趣。
Mazeika等[25]研制了一种新型的小尺寸线性压电惯性摩擦致动器,如图20所示。
此压电致动器设计简单,由4个矩形双晶片压电板固定在2个金属支架上,通过2个弹簧连接。致动器的激励可以通过单锯齿或矩形脉冲信号来实现。对压电作动器进行了数值研究,分析了作动器的固有频率、模态形状和对不同激励信号的响应。驱动电压为40 V时,滑块的最大空载速度达到40.376 mm/s,驱动电压相同时,致动器的最大推力达到0.21 N。
不过,一种能同时调节驱动力和摩擦力的惯性冲击压电致动器的具体结构至今未被提出。也就是说,驱动力和摩擦力对这种致动器输出性能的协同作用在理论上还不清楚,其工作机理尚不明确。目前迫切需要提出一种同时调整驱动力和摩擦力的控制策略,从全局角度优化惯性冲击压电陶瓷致动器的输出性能。
Wen等[26]提出了一种角度可调的惯性冲击压电致动器,其结构如图21所示,它具有一对角度可调的振子,此装置可以同时调整驱动力和摩擦力的控制策略,从全局角度优化惯性冲击压电陶瓷致动器的输出性能。
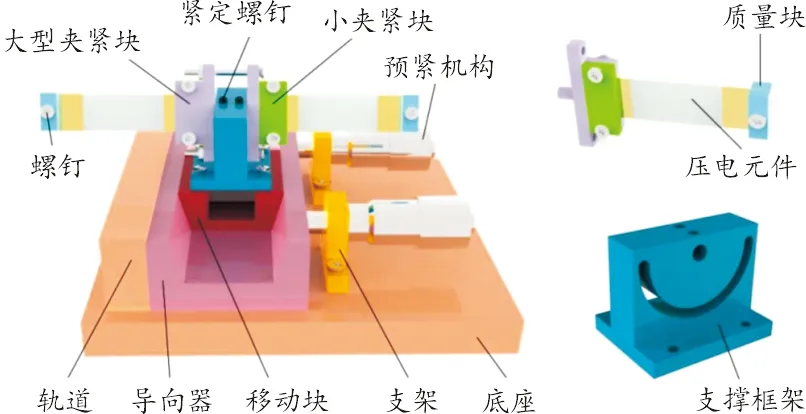
图21 惯性冲击压电作动器的结构示意图
通过实验结果可得,在倾角为60°,驱动电压为10 V时,致动器分辨率为0.24 μm,由于其输出性能优异,被广泛应用于精密制造领域。在驱动电压为90 V,倾角为75°的条件下,惯性冲击压电致动器最大速度为15.54 μm/s。该团队为了寻找新的摩擦控制方法,提出了一种利用电磁铁控制磁流变液的剪切力直接调节摩擦力的方法,研制了一种由两端固定梁非对称结构,以及由电磁铁控制的磁流变液摩擦调节单元组成的压电致动器,其执行机构如图22所示[27]。采用Matlab/Simulink和COMSOL对压电陶瓷致动器进行了模态分析和动力学分析。通过样机试验,验证了电磁控制磁流变液用于摩擦调节的可行性。该致动器采用电磁控制磁流变液单元,无回退运动。在25 V、7 Hz的方波激励信号下,磁场为19.5 mT时,最小步进位移为0.1,回退率为0.92;磁场为8.4 mT时,最大步进位移为2.53,回退率为0。
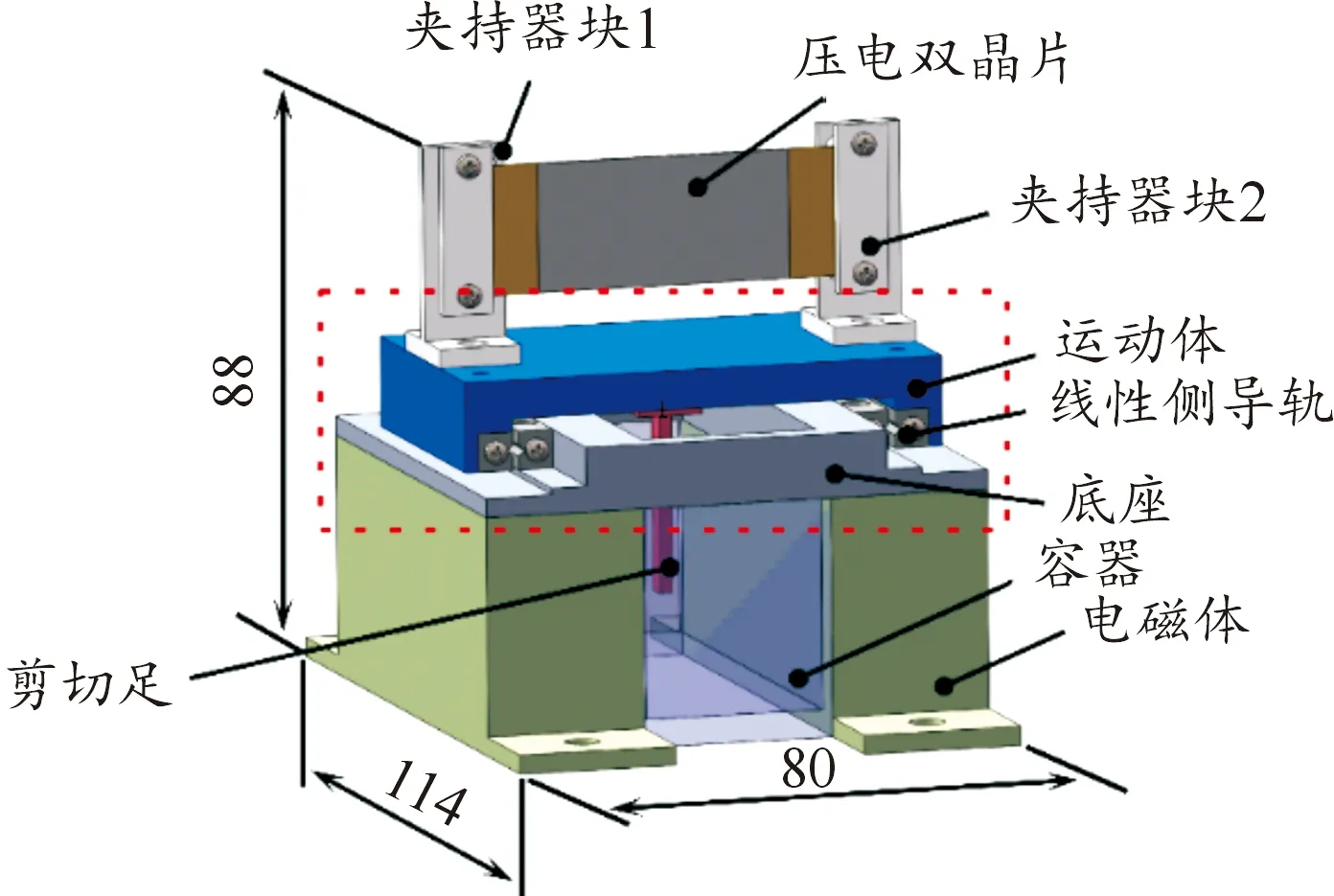
图22 电磁控制磁流变液执行机构示意图
需要注意的是,由于在快速收缩阶段,惯性力应大于摩擦力,惯性块的质量必须大到足以产生惯性力。此外,冲击力对整个系统产生不稳定的振动,这也限制了冲击驱动压电作动器的广泛应用。为了克服此问题,Higuchi等[70]首次阐述了粘滑致动器的工作过程和基本构成,该致动器是由冲击驱动致动器改进的。此后,粘滑型压电致动器因其结构简单、控制系统简单等优点,受到了国内外研究者的广泛关注。世界上首个粘滑型压电驱动装置的研究是Pohl等[71]在西班牙的第一届国际扫描隧道显微学学术会议上发表的。近年来,压电粘滑驱动装置的研究主要致力于解决机械结构优化、驱动原理改进、摩擦性能调控及驱动波形优化等问题[72]。
王吉如[28]在寄生惯性驱动方法的基础上,提出了通过放大压电堆叠位移提升性能的粘滑型驱动方法,研制了位移增幅型压电驱动装置,其结构如图23所示。该结构设计了将桥式柔性机构和杠杆柔性机构串联的新型柔性机构,叠加了位移放大能力。通过对驱动装置样机进行试验测试,得到在电压幅值为100 V,频率为1 Hz的条件下,该装置的垂直负载上限为3.6 kg。驱动装置最高速度为18.08 mm/s,水平负载能力为120 g。Qiu等[29]提出了一种新的协同补偿方法(CCM),补偿粘滑致动器的回退运动,可提高速度,如图24所示,该装置的驱动信号如图25所示。通过分析实验结果可得,此方法能有效地提高粘滑致动器的步长,特别是在低频驱动下,当驱动信号的频率为10 Hz时,带有CCM的致动器的步长是传统单驱动方法的29倍以上,在驱动信号频率为250 Hz时,此方法的最大步长为4.448 μm,超过传统方法步长的48%。该装置需要进一步研究前馈控制器与协同补偿相结合的方法,以获得更好的稳定性和可重复性。
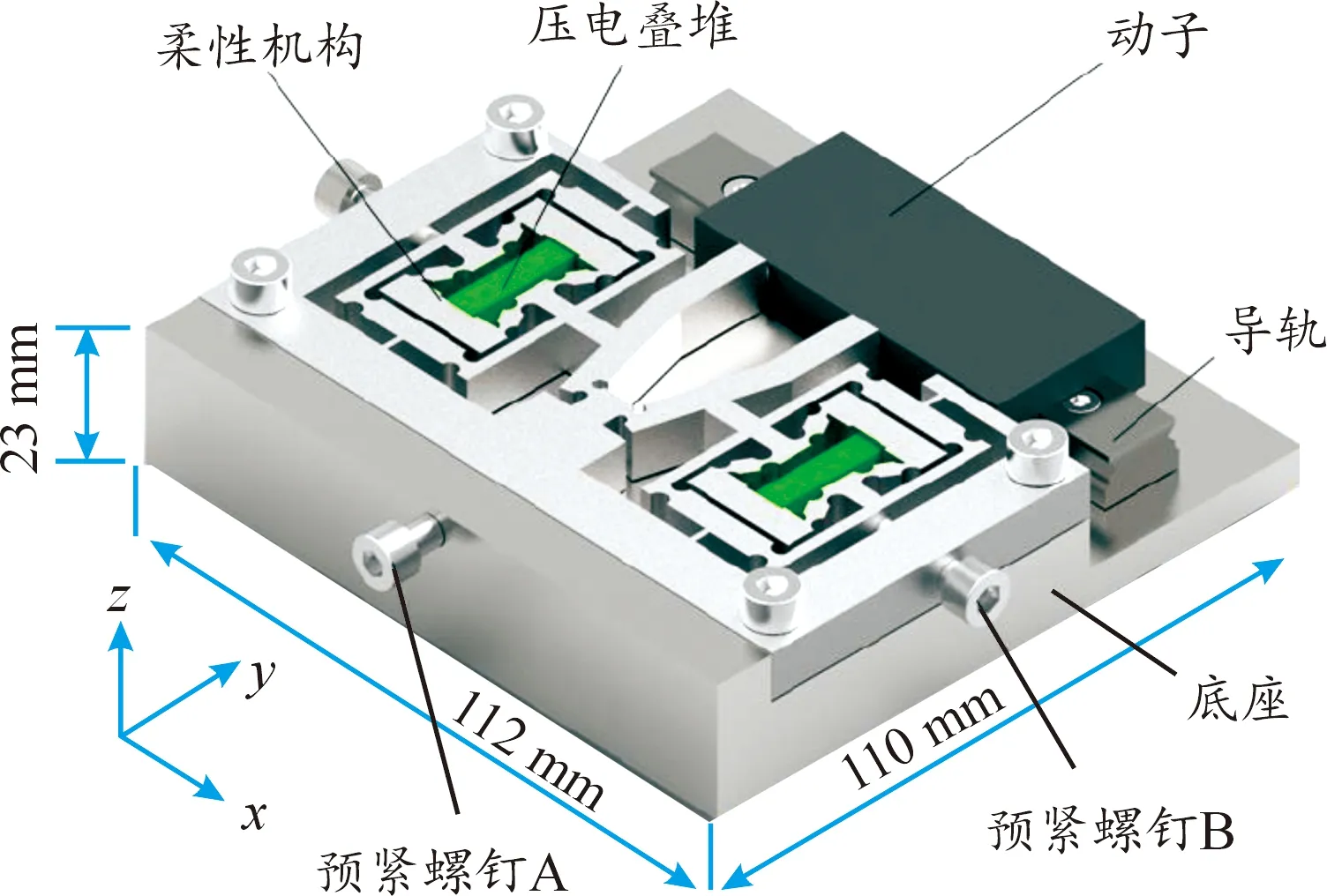
图23 位移增幅型驱动装置
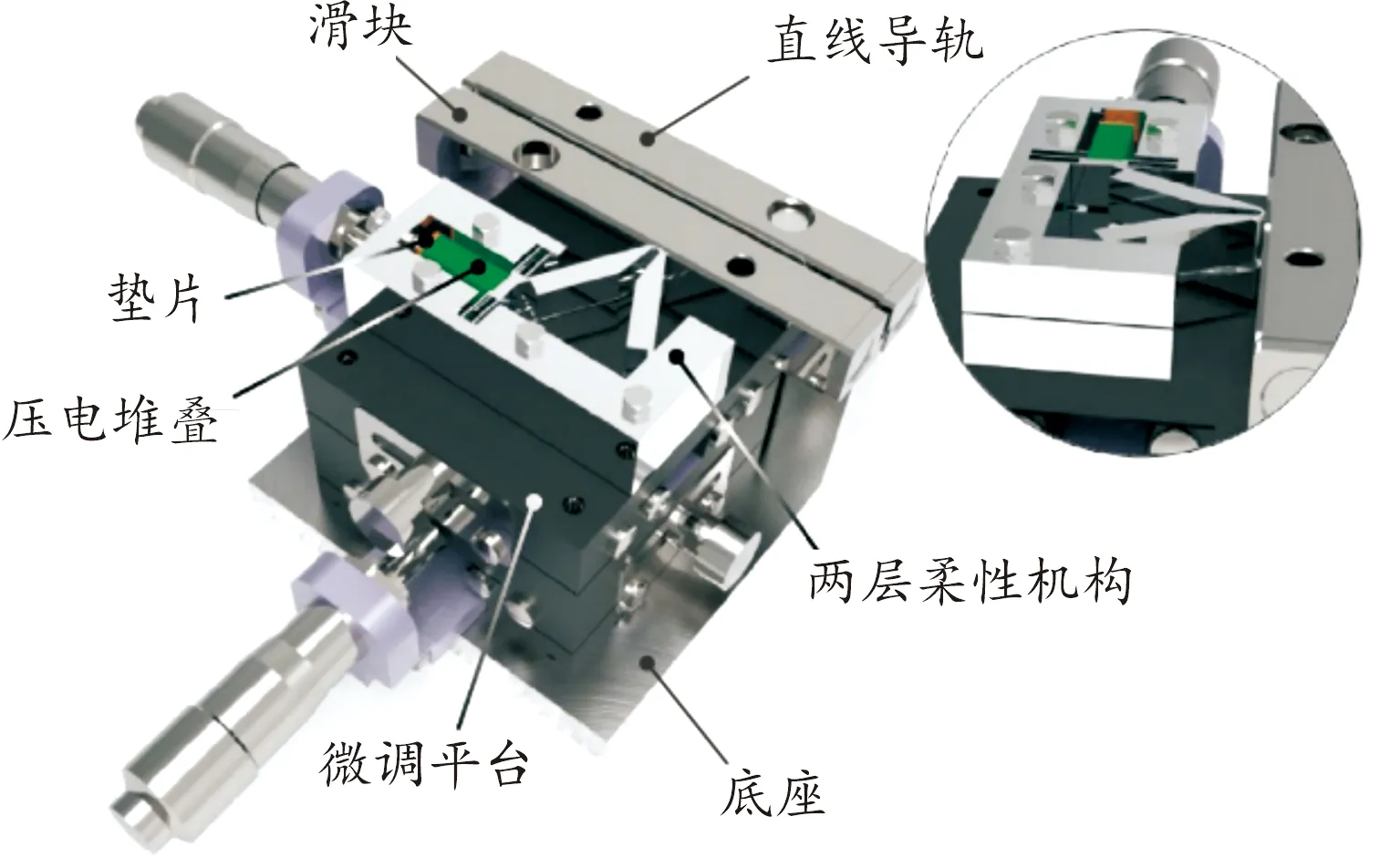
图24 粘滑致动器三维图
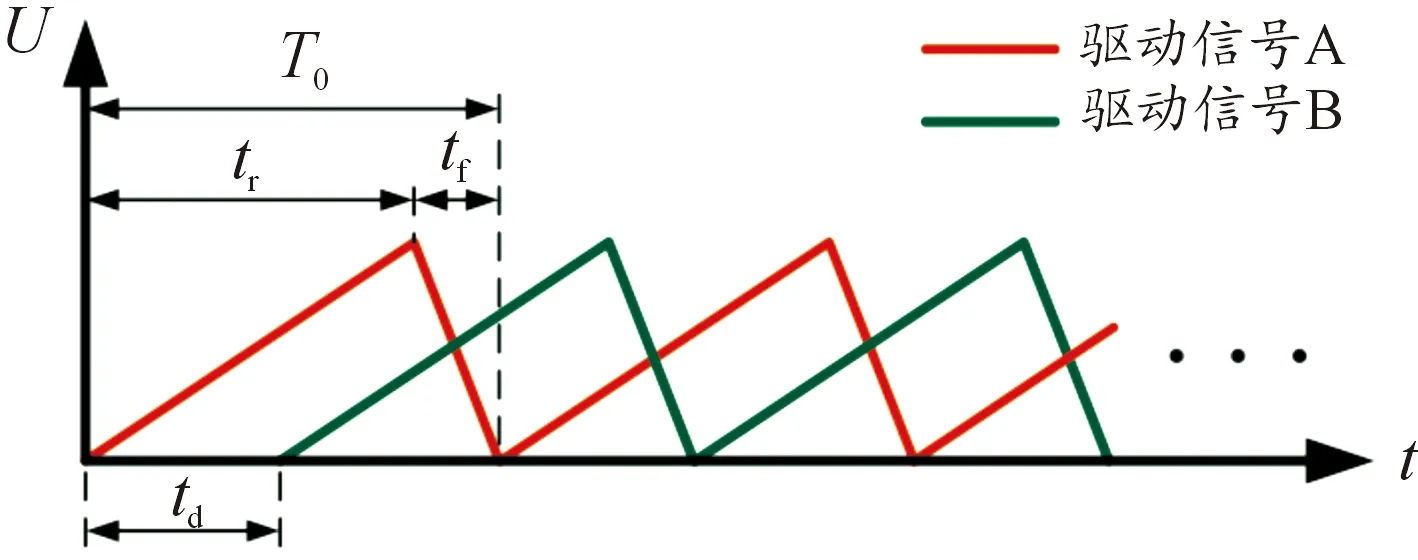
图25 协同补偿方法的锯齿波驱动信号曲线
粘滑型压电致动器是一种具有理论上可达到无限行程和纳米级高定位分辨率的新型压电致动器,但面临低负载能力的挑战,这限制了它的应用领域。Zhang等[30]提出了一种通过共享驱动足的方法,其结构如图26所示,基本思想是采用2个压电元件和一个共用的驱动足,向前或向后驱动,并且两者都涉及在“粘”运动阶段的夹紧动作和在“滑”运动阶段的释放动作,从而可以在2个驱动方向上实现大的驱动力/负载能力。通过实验结果验证了该方法的有效性,在100 V、1 kHz的锯齿波电压下,样机空载前进和后退速度分别高达18.6 mm/s和 16 mm/s,2个驱动方向的负载能力均大于2 kg,向前和向后的驱动速度分别为1.8 mm/s和 0.6 mm/s。Shi等[31]提出了一种结构紧凑、可实现往复运动的新型直线型粘滑致动器,其结构如图27所示。
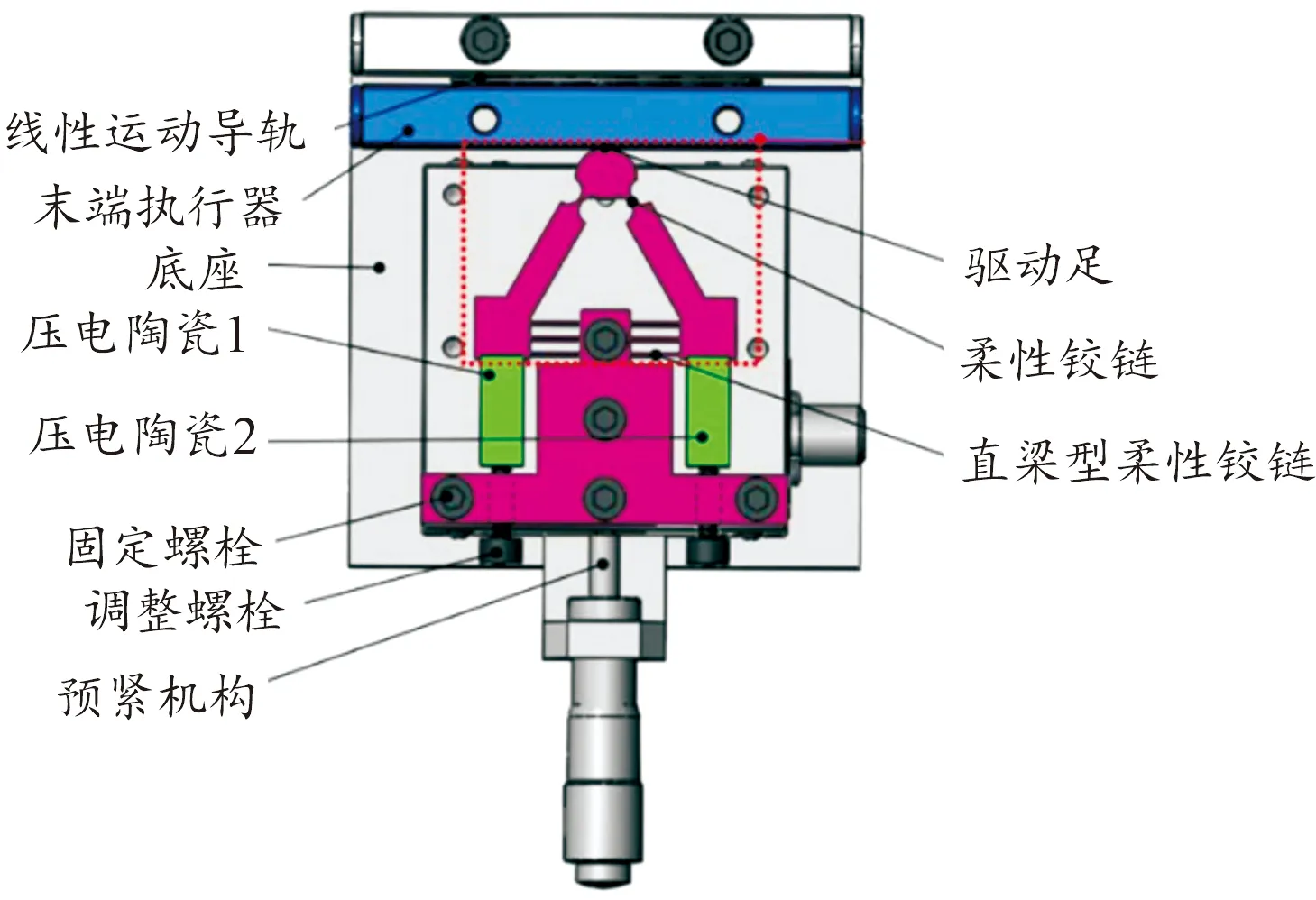
图26 共享驱动足型粘滑驱动平台结构示意图
此装置采用新型对称结构菱形位移放大机构产生横向运动,提高了致动器的性能。此外,还提出了一种2个驱动足共同作用的新型驱动方法,可以提高作动器的负载能力。通过实验结果表明,驱动机构前后运动的最大速度分别为428.5、443.2 μm/s。与单足驱动方法相比,采用新的驱动方法后,致动器的承载能力由1.2 N提高到1.6 N。最后,利用该致动器搭建了一个微定位工作台,实验结果表明该工作台工作稳定。现有的粘滑驱动平台在重载的情况下很难实现平稳的运动,限制了输出性能。为了实现在载荷作用下的平滑运动,Ding等[32]提出了一种采用交替步进法的粘滑致动器,如图28所示。2个驱动足协同推动滑块通过一个压电堆叠。试验结果表明,此次的粘滑型压电致动器具有极高的适应性,所设计的致动器在空载和水平载荷条件下具有良好的平滑性,最大速度和分辨率分别为24.42 mm/s、0.80 μm。
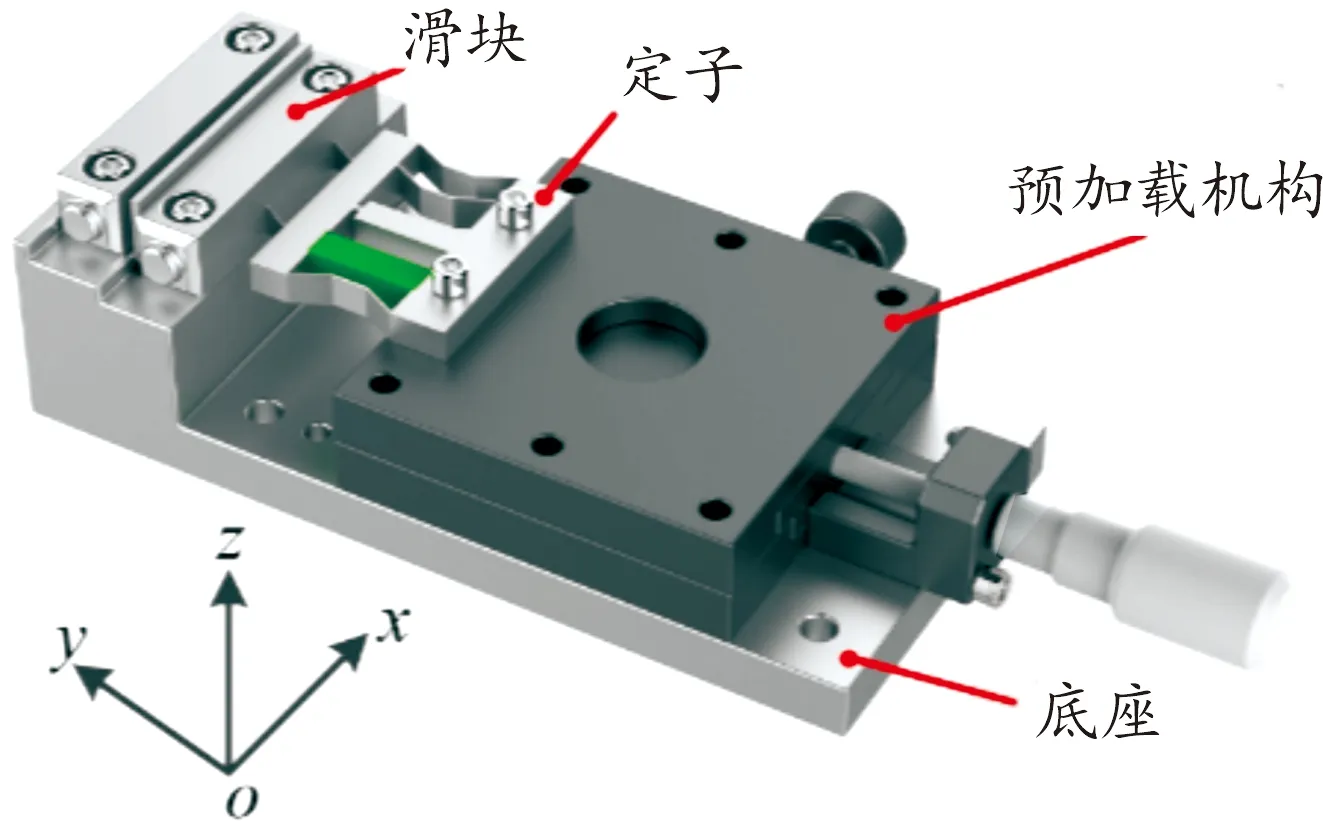
图28 交替步进法的粘滑致动器
近些年,随着粘滑驱动装置在微/纳定位行业的兴起,国内研发与制作粘滑型压电驱动装置的公司如雨后春笋般涌现出来,如哈尔滨芯明天科技有限公司、阿米精控科技(山东)有限公司等。其中,阿米精控科技(山东)有限公司生产的一维长行程纳米促动器如图29所示,该产品具有10 mm~数百毫米的超大行程;重复定位精度小于5 nm;运动速度可达10 mm/s;保持力可达8 N,具有很好的稳定性。此外,该公司也生产二维、三维长行程纳米促动器(图片来源于公司官网)[76]。
图29 阿米精控科技有限公司生产的一维纳米致动器实物图
德国的Physik Instrumente(PI)公司生产的线性平台,其行程范围为12~32 mm,速度为6~8 mm/s,驱动力一般为7 N,定位精度为纳米级。图30为PI公司生产的Q-545 Q-Motion®精密线性平台。
粘滑型压电致动器的运动可分为“粘”运动阶段和“滑”运动阶段,当前压电粘滑驱动技术的相关研究主要从新构型、新方法等方面开展[65-66],其结构简单、易于封装,同时理论上可实现毫米级输出行程及纳米级定位精度的跨尺度驱动,但由于其驱动原理所造成的位移回退,使致动器存在大行程、高精度与高负载等难以同时兼顾的问题;因结构限制少数通过多驱动单元实现摩擦力综合调控以减小位移回退量的致动器,难以实现双向驱动设计,从而制约了压电粘滑致动器的进一步发展与应用[73-74]。
5 对比与展望
基于以上综述,表1总结出了3种步进型压电驱动平台的性能比较。可以明显看出,尺蠖型压电致动器具有较高的定位精度和较大的输出能力,但是运动速度相对较低且控制方法复杂;粘滑型压电致动器具有相对较均衡的性能,结构简单紧凑、输出力较高,并且可实现大工作行程。融入仿生设计后,粘滑压电致动器的结构更具多样性,满足了许多特定需求。但是达到大行程的同时,粘滑压电致动器的速度和分辨率等输出特性又会受到影响。因此,还需要进一步研究高性能的大行程粘滑压电致动器。
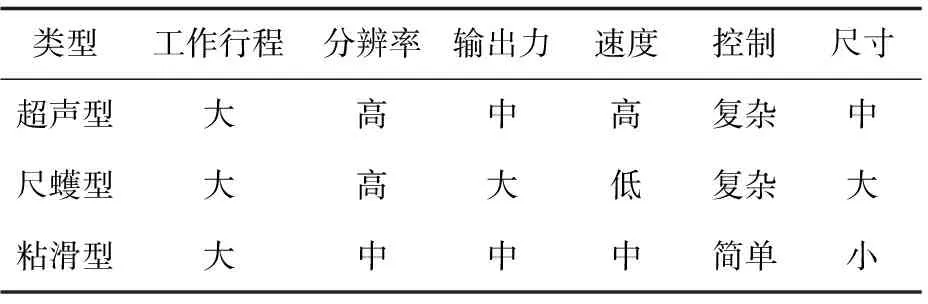
表1 各类型步进压电致动器的输出性能对比
在前人对步进式压电致动器研究的基础上,对步进式压电致动器的运动原理和性能进行了分析。但要克服这3种类型压电致动器存在的问题[75],增强其实际应用,还需进一步研究:
1) 与其他2种类型的步进型压电致动器相比,尺蠖型压电致动器虽然可以实现相对较高的负载,但是其结构与控制方法比较复杂。在以后的研究过程中应探索通过设计巧妙的柔性机构或新颖的制造方法来进一步简化其结构。
2) 虽然超声型压电致动器的输出性能比其他2种步进型压电致动器好,但是其控制方法比较复杂,应该探索更简单有效的法,简化其控制难度,并且动子与定子之间是通过摩擦传递动力,会影响其使用寿命,这也是在以后研究过程中需要解决的问题。
3) 虽然粘滑型压电致动器的结构和控制相对简单,但是承载能力较低,并且由于运动原理,步进运动中普遍存在回退运动。因此,提高其承载能力和抑制后移的研究还有待深入。
由于压电致动器应用与微/纳米定位系统中,所以以上3种致动器的结构要尽量紧凑,尺寸要尽可能小,而且需要对控制系统进行改进,以获取更良好的输出性能。
6 结束语
1) 本文综述了步进型压电致动器的研究现状,重点介绍了3种类型的步进型压电致动器(尺蠖型、超声型、粘滑型),与其他类型的压电致动器相比,步进型压电致动器不仅可以实现较大的工作行程,而且可以获得较高的定位精度。
2) 对这3种步进式压电致动器的工作原理与研究现状进行了阐述与讨论,将国内外商用产品的输出性能进行了对比,国内相关产品的输出性能与国外公司的产品有一定差距,但性价比高。
3) 对以后的发展进行了展望。尺蠖型压电致动器要向更简单的结构与控制方向发展;超声型压电致动器要改善摩擦带来的影响,提高使用寿命;粘滑型压电致动器对提高承载能力以及抑制后退的方法还需要进一步研究。目前的步进型压电致动器仍需改善其输出性能并满足实际应用中不断变化的要求。
猜你喜欢
浙江农业学报(2020年8期)2020-08-30
压电与声光(2019年1期)2019-02-22
科技风(2018年31期)2018-07-09
铜仁学院学报(2018年6期)2018-07-05
爱你(2017年13期)2017-11-15
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
科技资讯(2016年8期)2016-05-14
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01