碎冰海域航标维护船船型设计及阻力性能研究
2023-11-24 09:33谢云平高春锋王成刚恒乙鑫
舰船科学技术 2023年18期
戴 可,谢云平,高春锋,王成刚,恒乙鑫
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
0 引 言
中小型航标船在我国沿海地区使用较多,但北部航道很多海域在冬季会有冰层[1],在破冰船行驶过后,海面会漂浮着大量碎冰,所以常规船型在此期间航行与航标维护存在一定的困难[2]。为此,本文立足维护功能及使用要求,通过推进操纵装置的选择,并设计与之匹配的船尾型线及对阻力影响较大的船首几何形状,采用数值仿真技术,寻求具有较好静水阻力和碎冰阻力的船型方案。
1 船型方案设计
针对碎冰海域航标巡检与维护的特点,要求维护船的快速性能要好,且阻力性能也要好;要求其操纵性能良好,以提高航行过程中避让较大浮冰的能力,尤其是靠标时的主动控制能力,确保维护时人与标的安全。
航标布设船有良好的耐波性,其在船首甲板区域的夹持装置可与选择的操纵装置相配合,让船在良好的操纵性下尽可能靠近航标,再用加持装置让标与船保持一定的动态平衡,降低工作人员“跳标”时的危险和工作时的眩晕感,从而加快维修速度。但该船型在北海地区航行效果并不理想,故不改变此船的主要要素并采用全回转舵桨装置来重新设计船型。
1.1 母型船简介
本文采用的母型船主尺度如表1 所示。此外,母型船采用常规双桨双舵推进操纵装置,船体型线如图1所示。
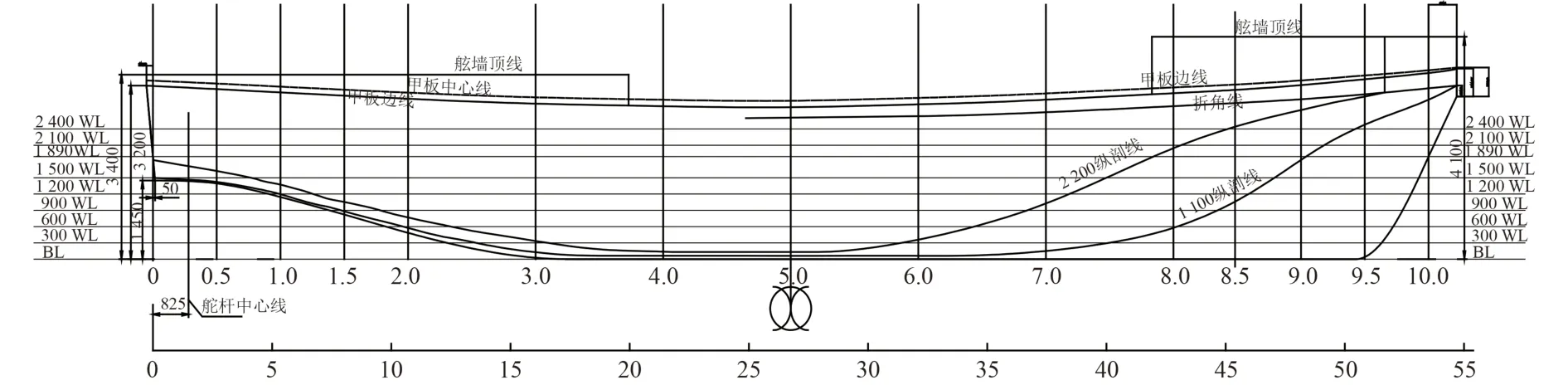
图1 母型船型线图Fig.1 Line chart of mother ship

表1 母型船主要要素Tab.1 Main elements of mother ship
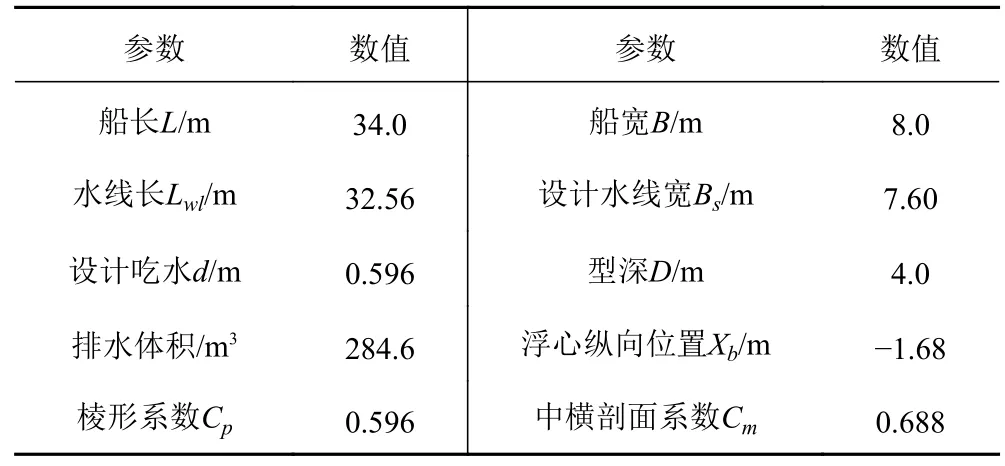
表2 引航交通船的主要参数Tab.2 The main parameters of the pilot transport ship
1.2 航标维护船推进操纵装置选择
维护船的驾驶好坏与其选择的推进操纵装置息息相关。由于母型船选用常规舵桨,考虑到本船需在碎冰区安全航行,且要精准靠标,初步选择了主机功率为350 kW 的全回转舵桨。为更好凸显两者回转性能的差别,在数据模拟过程中使用NAPA 软件的操纵模块,设定为3 kn、舵角为30°为其初始运动状态。由图2可知,全回转舵桨的定常回转性能更好。
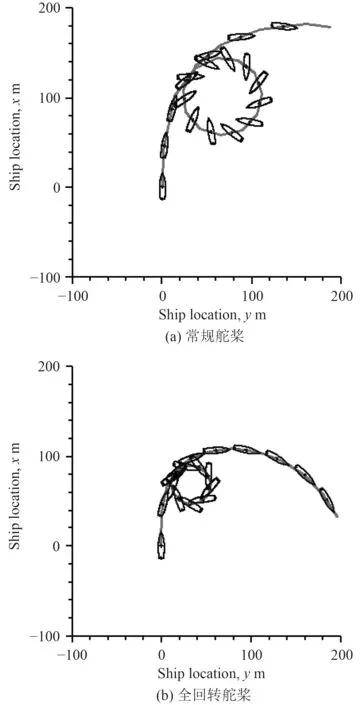
图2 回转运动数值模拟图Fig.2 Rotational motion test diagram
1.3 航标维护船船型方案设计
根据维护船在碎冰海域行驶需有良好的性能,本文在保持船型和主要要素、排水体积和浮心纵向位置不变的前提下,结合全回转舵桨的匹配要求和对碎冰阻力有利的首型加以考虑。
方案1 母型船与尾舵桨布置配合形成的新船型。由上文的主机功率,确定其要在距船尾1.5 m 处水平安装并旋转,所以图3 中尾端部的纵剖型线较为平缓。船首则与母型船一样,整船型线如图4 所示。

图3 船尾端型线Fig.3 End line of stern

图4 方案1 型线Fig.4 Line diagram of scheme one
方案2 在方案1 的基础上仅对船首进行较小调整,即改为球根型。此船首很特殊——线型在设计水线以下很瘦长,使其静水、兴波阻力性能在突发情况下仍旧很好[3–4]。参考文献[5],球根长度取设计水线长的2%,即0.95 m,如图5 所示。
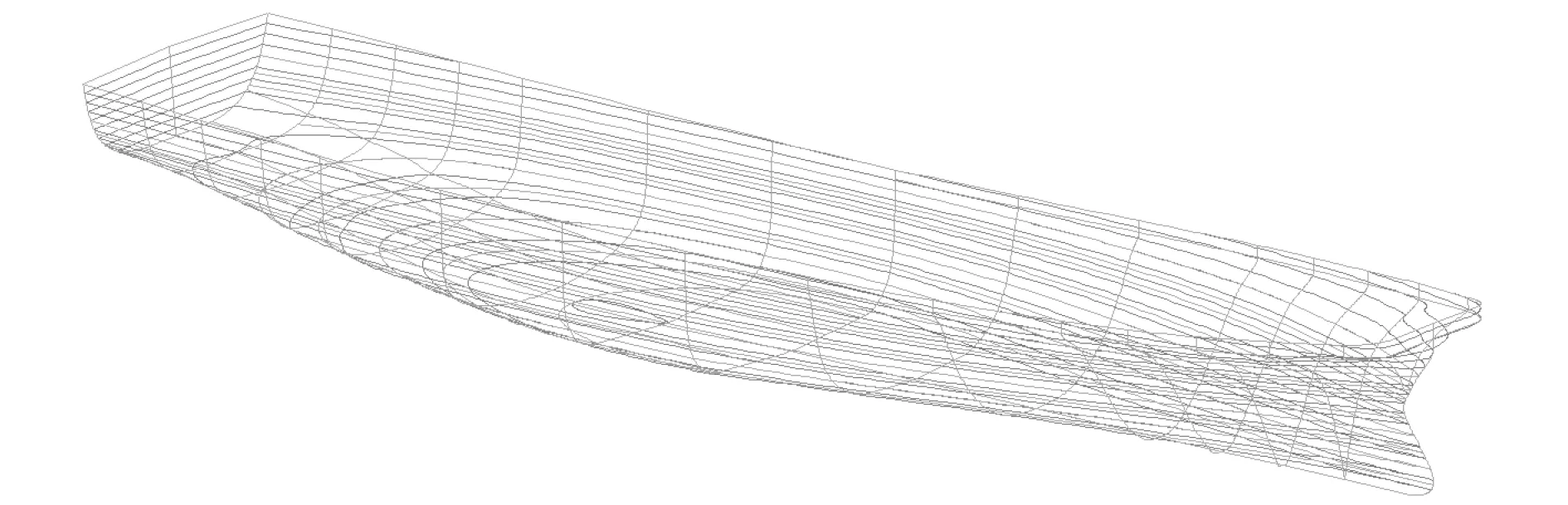
图5 球根型首船型线Fig.5 Spherical bow line
考虑到维护船在碎冰海域航行时减少船中碎冰的堆积,方案3 是在方案1 的基础上仅将船首改为了宽“V”型,如图6 所示。

图6 宽V 型首船型线Fig.6 Wide V-shaped bow line
2 静水阻力数值仿真研究
2.1 仿真方法
2.1.1 验证船型
由于本文的研究对象是单体船,其首部为V 型,中部为圆舭型,尾部为较长尾悬线型,所以验证船型选取一艘与其相似的引航交通船。
图7 为NAPA 软件用已有的引航交通船的图纸建出的模型,后将其导入STAR-CCM+软件,计算其服务航速下的静水阻力,并利用该船在拖曳水池船模试验资料来验证仿真方法的有效性。

图7 引航交通船模型Fig.7 Pilot traffic vessel model
2.1.2 流体控制方程与湍流模型
不可压流体动量守恒方程:
式中:gi为质量力; ρ 为流体密度;p为压力;Ui为三维坐标系中xi方向上的速度分量[6]。
连续性方程:
标准k-ε 模型是本文采用的湍流模型,k和 ε的输运方程为:
式 中:C1ε,C2ε,Cµ为经验 常数;Rε为湍流常数。
2.1.3 计算域和网格划分
本文采用长方形的流体域。为充分捕捉流场域内尾流的状态和自由液面的具体情况,同时避免因边界条件的限制造成波浪阶段回流的现象,所以在流场域后端向后延长至5L(L为船长)处。为充分模拟真实水深,流场域的底部设置在距离船底基线下2L。为保证计算效果,流场域的顶部距离船体基线位置1.5L。为了避免流体域壁面对计算结果造成影响,从而让船处于距两边各间距2L。图8 为速度进出口、压力出口、对称平面的分布示意图。
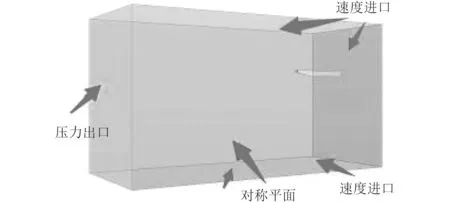
图8 流场域示意图Fig.8 Flow field diagram
船体的网格选用厚度为200 mm 的棱柱层,共6 层。在计算静水阻力时,因为船体近壁面第1 层网格数的厚度直接影响整体的计算精度,所以式(5)中的y+值 需在30~300。式中的 ∆y为第1 层网格到壁面的距离、 ν为动力粘性系数; τw为壁面切应力[7];计算可得y+值为39。全船的网格数量为180 万,如图9 所示。将时间步长设为0.01 s,其内部迭代10 次。
2.1.4 数值模拟结果验证
本文预报引航交通船实船阻力的方法为Froude法,将实船模型缩小10 倍后导入软件STAR-CCM,计算得到船模[8]的静水阻力Rtm,最后用式(6)换算出实船的静水阻力Rts。表3 为不同航速下仿真阻力值与试验值,以及两者的误差,可看出误差值为3 %~6.4%,证明静水阻力数值仿真方法较为有效。
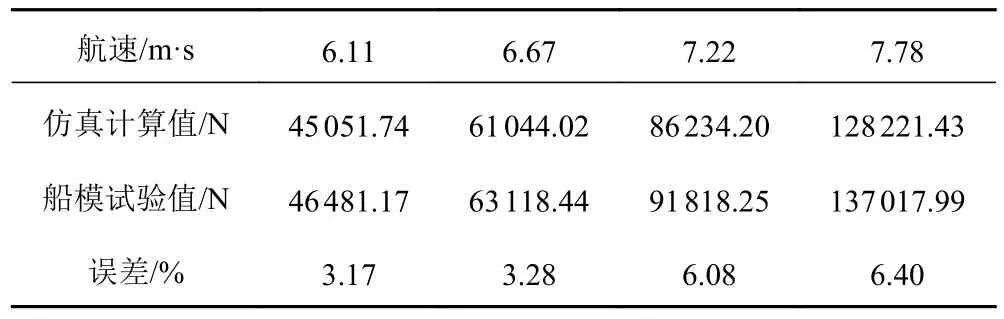
表3 各航速下仿真阻力值与试验值Tab.3 Simulation resistance value and test value at different speeds
式中:海水密度ρs=1.025 t/m3;淡水密度ρm=1.000 t/m3;Rfm和Rf s分别代表船模和实船的摩擦阻力。
2.2 航标维护船型数值仿真
2.2.1 系列模型
为选出静水阻力最小的船型方案,将3 种船型(见图10)利用上述数值仿真方法进行静水阻力仿真。
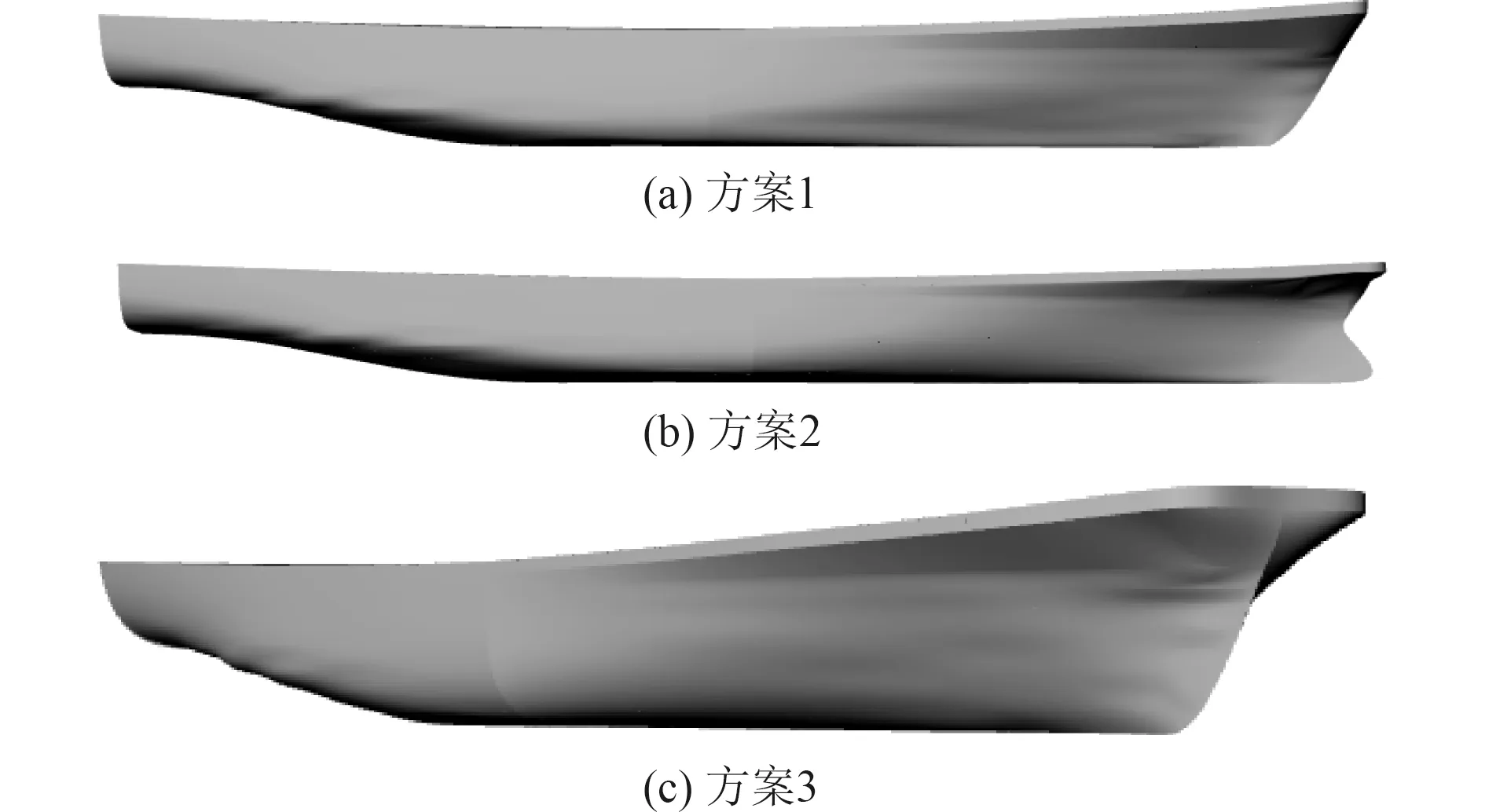
图10 方案模型Fig.10 Model of scheme
2.2.2 仿真结果分析
通过仿真,得到静水阻力计算结果如图11 所示。
可知,3 个方案的阻力值和阻力值增幅都随着航速的增加而变大。图12 为方案2、方案3 的阻力在方案1 基础上改善后的对比值。

图12 两方案较方案1 阻力改善计算百分比Fig.12 The two schemes calculate the percentage of resistance improvement over scheme one
可知方案2、方案3 的阻力较方案1 都有一定的减小,但在航速从10 kn 增至14 kn 时,方案3 的减阻跨度并不大,而方案2 效果很好。综上可知,方案2 在静水阻力模拟过程中,阻力性能最好。
3 碎冰阻力数值仿真研究
据最新冰情预报可知,维护船在碎冰地区的巡检工作有很大困难。为此,本文在LS-DYNA 软件中用流固耦合方法来进行冰阻力数值模拟,探求3 个方案中的最优船型。
3.1 模拟方法理论
ALE 算法是本文模拟方法。为解决碎冰变形问题,将用式(7)计算分析。
式中:Xi为拉格朗日坐标;xi为 欧拉坐标; ∆vi为相对速度;ui为 流体质点速度;wi为参考坐标系下的网格速度[9]所示。
3.2 碎冰域仿真模型相关参数设置
本文航标维护船在选择材料过程中使用刚性体,所以当船与冰发生碰撞时,不考虑船内部结构的应力变化。船体模型材料参数如表4 所示。水域的长度为5L;深度为5 m。空气域长为3B(型宽);高度为3 m。网格大小为1 m,在2 种介质交界共面处使用共节点网格,如图13 所示。

图13 流体域模型Fig.13 Fluid domain model

表4 船体模型材料参数(MAT_RIGID_(020))Tab.4 Material parameters of hull model
由于水域、空气域边界会产生人工应力波,所以设置非反射边界条件来预防其对仿真结果产生影响。为了不计算状态方程的偏应力,同时可定义粘性,水和空气选NULL_(009)材料,其余流体模型材料参数如表5 所示。
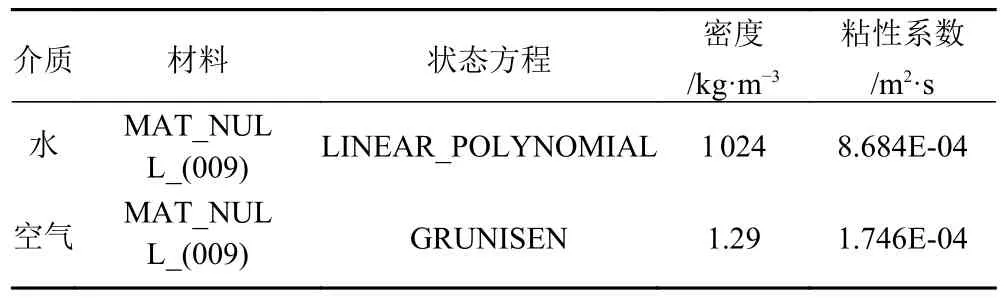
表5 流体模型材料参数Tab.5 Material parameters of fluid model
采用弹塑性海冰本构模型,其材料参数见表6[10]。参考实际情况,选定碎冰的覆盖率为50%,冰层厚度为0.15 m。
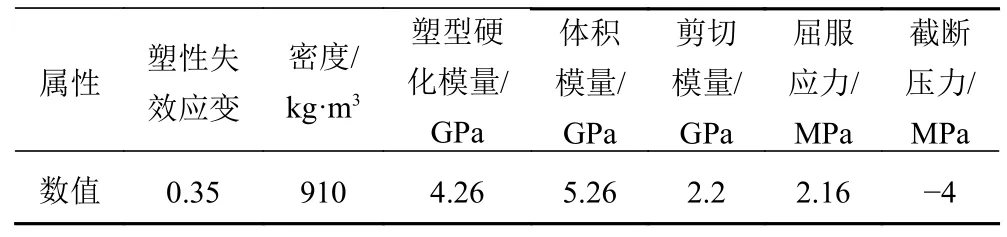
表6 碎冰材料参数Tab.6 Material parameters of broken ice
在耦合水、空气、船和冰之后,用恒定的速度在X方向计算,总时长为30 s。流体域与碎冰域的长度分别为150 m、80 m,宽度分别为60 m、55 m,如图14所示。
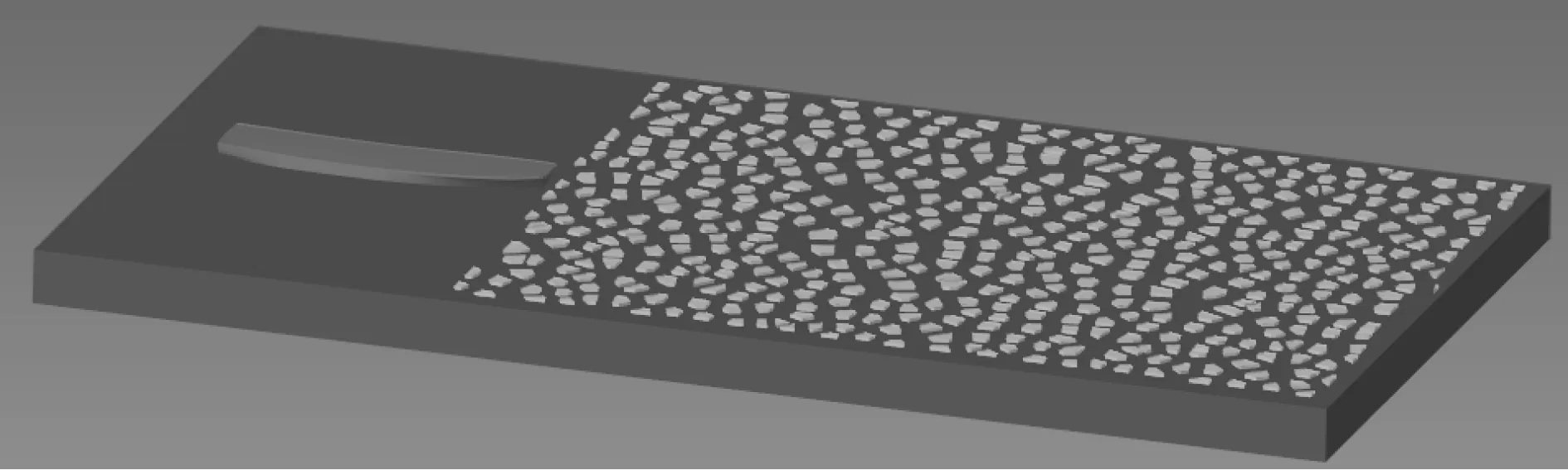
图14 船体-冰耦合模型Fig.14 Ship-ice coupling model
3.3 维护船碎冰域阻力仿真
在构建好船冰的耦合模型、确定模拟需要的材料参数后,将在50%密集度的碎冰域[11]中,用静水模拟时使用的4 种航速对3 种船型进行阻力仿真。
图15 展现了方案1 沿X方向阻力随时间的变化趋势,可看出船与冰的碰撞伴随航速提高而愈演愈烈,但其增长并不规律。阻力峰值在动能较大时很高,航行的某个时间段船首底部积压碎冰而降低了动能,使得峰值下降。方案2、方案3 亦是如此。

图15 方案1 碎冰阻力曲线Fig.15 Broken ice resistance curve of scheme one
为更好地观察比较3 个方案的阻力大小,在表7中列出总时间段内的平均碎冰阻力值。

表7 平均碎冰阻力值Tab.7 Average value of crushed ice resistance
为更直观地看出3 个方案的区别,将碎冰阻力值用图16 表示。

图16 阻力均值折线图Fig.16 Average resistance line chart
可知,航速在1.95 m/s 之后,方案1 和方案3 的阻力值较大,且方案1 的阻力值增加梯度较大。方案2在整个碎冰区的航行过程中阻力均值稳定在25 000~35 000 N,相较其他2 方案其增幅较为平缓。方案3 在前期航速阶段阻力增值较大,说明其与碎冰产生接触并碰撞的时间最早。综上表明,方案2 的船型具有较好的碎冰阻力性能。
4 结 语
针对碎冰海域航标安全、高效维护的需要,依据母型船船型所设立的3 个不同船型方案及其数值仿真结果,得到以下结论:
1)采用全回转推进操纵装置及与之匹配的尾型,在模拟中具有较小的回转直径(是常规舵桨的一半),体现了优良的操纵性性能,适合碎冰海域航标安全操纵和精准靠标操控的需要。
2)采用球根型船型的方案2 具有较好的静水阻力和碎冰阻力性能,可作为碎冰海域航标维护船船型使用。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
房地产导刊(2022年4期)2022-04-19
船舶力学(2022年1期)2022-02-10
造船技术(2021年6期)2022-01-05
党员生活·中(2021年8期)2021-08-30
机械与电子(2020年10期)2020-10-22
中国军转民(2017年9期)2017-12-19
文苑(2016年14期)2016-11-26
超硬材料工程(2016年1期)2016-02-28
舰船科学技术(2016年1期)2016-02-27