
高动态条件下的自行高炮稳定跟踪力矩分析
2024-03-04 13:18江腾耀曹莹星王伟伟耿晓虎
兵器装备工程学报 2024年2期
江腾耀,李 伟,曹莹星,王伟伟,耿晓虎
(西北机电工程研究所, 陕西 咸阳 712000)
0 引言
自行高炮作为将火力与机动合二为一的防空武器,是野战陆军伴随防空的重要装备,随着战场形势的快速变化,自行高炮具备行进间射击能力已成为其适应作战条件的迫切需求。稳定跟踪系统是自行高炮实现行进间射击的关键部件,通过方位轴和俯仰轴伺服电机驱动高炮指向射击诸元跟踪目标并隔离车体姿态扰动。目前的自行高炮在行进间射击时必须有合理的车速及较好的路况条件[1],当车体处于高速机动和复杂路面的高动态条件下,火炮所受的扰动力矩的幅值和频率都会有明显的增加[2-4],尤其是高射角情况下,双轴电机的输出力矩会产生巨大变化,影响稳定跟踪系统效能的有效发挥。由于高炮射角高,且为了降低火线高,目前自行高炮的俯仰部分大部分采用质量偏心配置,利用平衡机抵消质量偏心产生的静态重力偏心力矩,同时减小伺服系统的功率,但各俯仰角下抵消后的残余力矩仍会给系统带来扰动[5-6]。此外,质量偏心会导致在载体运动状态下产生额外的动载荷干扰力矩,对稳定跟踪精度产生严重的影响。
目前,国内外火炮指向稳定方面已取得了一些研究成果。文献[7]初步建立了直驱式自行高炮射击线稳定系统的动力学模型,分析了不同俯仰角下干扰力矩的影响。文献[8]定量分析了摇摆角及目标运动对船载转塔随动系统随动力矩的影响,对摇摆角的幅值、周期和相位造成的影响进行了详细的分析。文献[9]提出了基于大地坐标系下速率陀螺闭环的火炮自稳定控制方法,有效地克服了较高频带的车体姿态干扰。但上述文献侧重于分析载体姿态对干扰力矩的影响,并未将载体的平动速度考虑到力矩的分析中,文献[13-14]中的建模包含了由车体由平动产生的干扰力矩,但尚未对该力矩产生的影响作系统性的分析。
目前,未查到存在质量偏心且处于平动与摇摆条件下的自行高炮稳定跟踪系统动力学建模与力矩分析,为此有必要建立完整的高动态自行高炮稳定跟踪系统动力学模型,对扰动力矩的主要成分进行分析,并建立其与伺服电机等效输出力矩(下文简称“输出力矩”)的联系,为支持行进间射击的自行高炮炮控系统设计提供理论依据。在载体旋转运动过程中,干扰力矩可分为对转轴动不平衡旋转惯性力矩和由于原点不在重心而导致的偏心力矩[15],一般情况下对轴转动不平衡旋转惯性力矩的影响极小,偏心力矩主要包括由重力产生的静态偏心力矩和由运动产生的动载荷干扰力矩。本文中根据自行高炮稳定跟踪系统的结构特点,建立了双轴欧拉动力学方程并对该系统进行了数值仿真,系统分析了影响动载荷干扰力矩大小的因素,定量分析了动载荷干扰力矩与输出力矩之间的关系。
1 坐标系定义
自行高炮稳定跟踪控制系统涉及多个坐标系,通过坐标系间的变换来描述车体、炮塔与自行高炮身管之间的相对运动关系。
本文中所取坐标系包含了惯性坐标系Onxnynzn(简称n系)、车体坐标系Obxbybzb(简称b系)、炮塔坐标系Ohxhyhzh(简称h系)、身管坐标系Opxpypzp(简称p系),各个坐标系均符合右手定则,其建立方法参考文献[13],自行高炮指向结构及各坐标系的关系如图1所示。
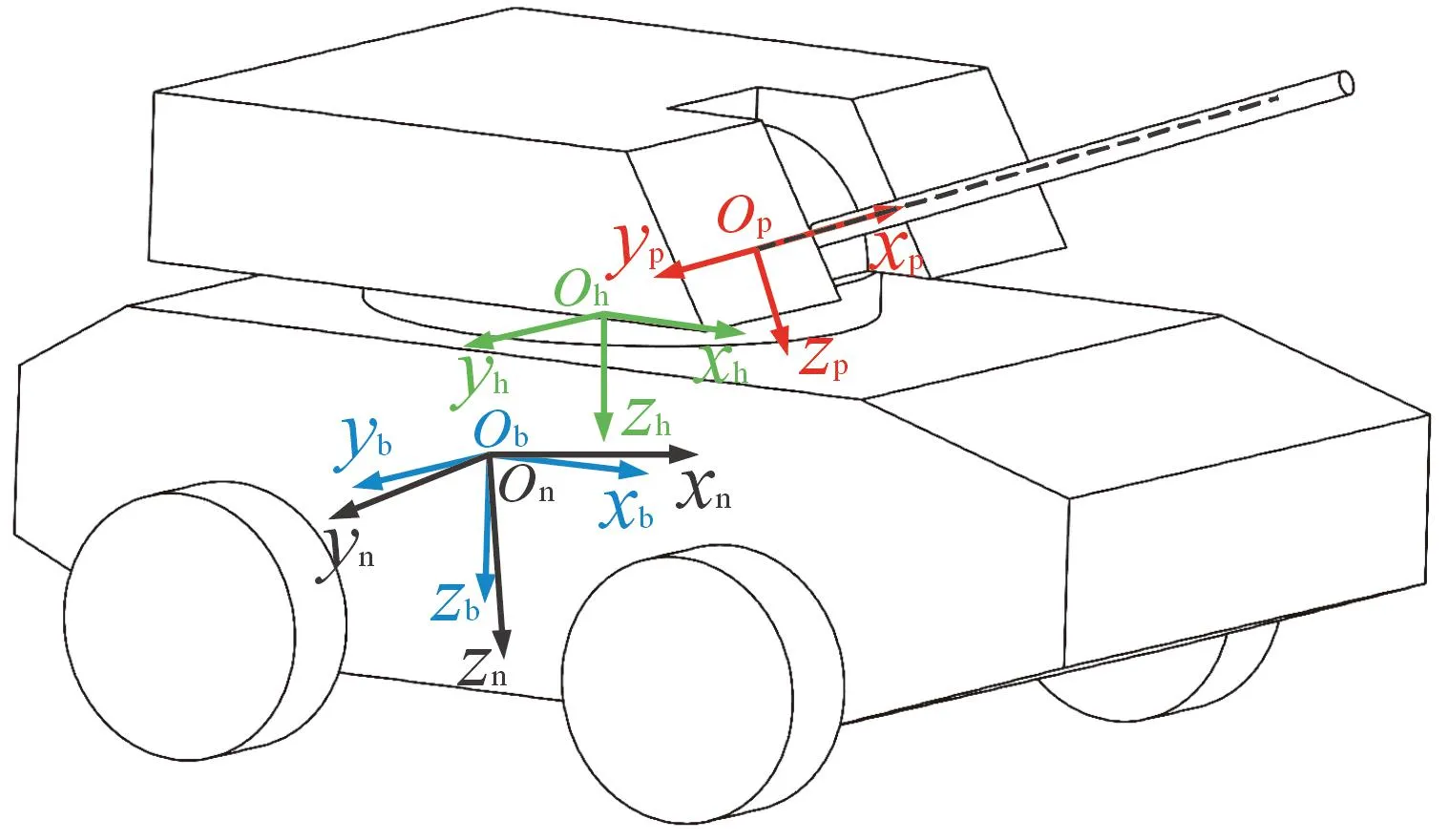
图1 自行高炮指向结构及其坐标示意图
车体坐标系和惯性坐标系之间的转换关系可用3个欧拉角来描述,φ、θ、ψ分别为车体横滚角、俯仰角、航向角。以惯性坐标系为基准,为了分析简单且接近实际,采用ψ→θ→φ的顺序分别绕对应轴进行3次旋转可得到车体坐标系Obxbybzb,其对应的变换矩阵为

(1)
式(1)中:
βb为炮塔相对于车体的方位向姿态角,则车体坐标系转换为炮塔坐标系的变换矩阵为

(2)
则由惯性坐标系到炮塔坐标系的变换矩阵为

(3)
εb为自行高炮身管相对于炮塔的俯仰姿态角,等同于自行高炮身管相对于车体的俯仰姿态角,炮塔坐标系转换为身管坐标系的变换矩阵为

(4)
则由惯性坐标系到身管坐标系的变换矩阵为

(5)
2 稳定跟踪系统双轴动力学模型
2.1 运动学模型

(6)


(7)

(8)


(9)
(10)


(11)

(12)


(13)

(14)


(15)

(16)
2.2 动力学模型
根据刚体旋转运动的欧拉动力学方程[15]:

(17)
式(17)中:T∑为合外力矩;J为刚体对运动坐标系原点的惯性张量;m为刚体的质量;ω为运动坐标系下刚体转动角速度,δω/δt为角速度在运动坐标系下的相对变化率;RG为运动坐标系原点指向质心的向量;U为运动坐标系下原点的速度,δU/δt为原点平动速度在运动坐标系下的相对变化率。
方位轴合力矩ThΣ和俯仰轴合力矩TpΣ可表示为

(18)
联立式(16)和式(17)可得到方位轴电机等效输出力矩Th和俯仰轴电机等效输出力矩Tp的表达式

(19)


(20)
重力偏心力矩、平衡机力矩、补偿力矩残差与εb的关系如图2、图3所示。

图2 不同俯仰角下的重力偏心力矩与平衡机力矩
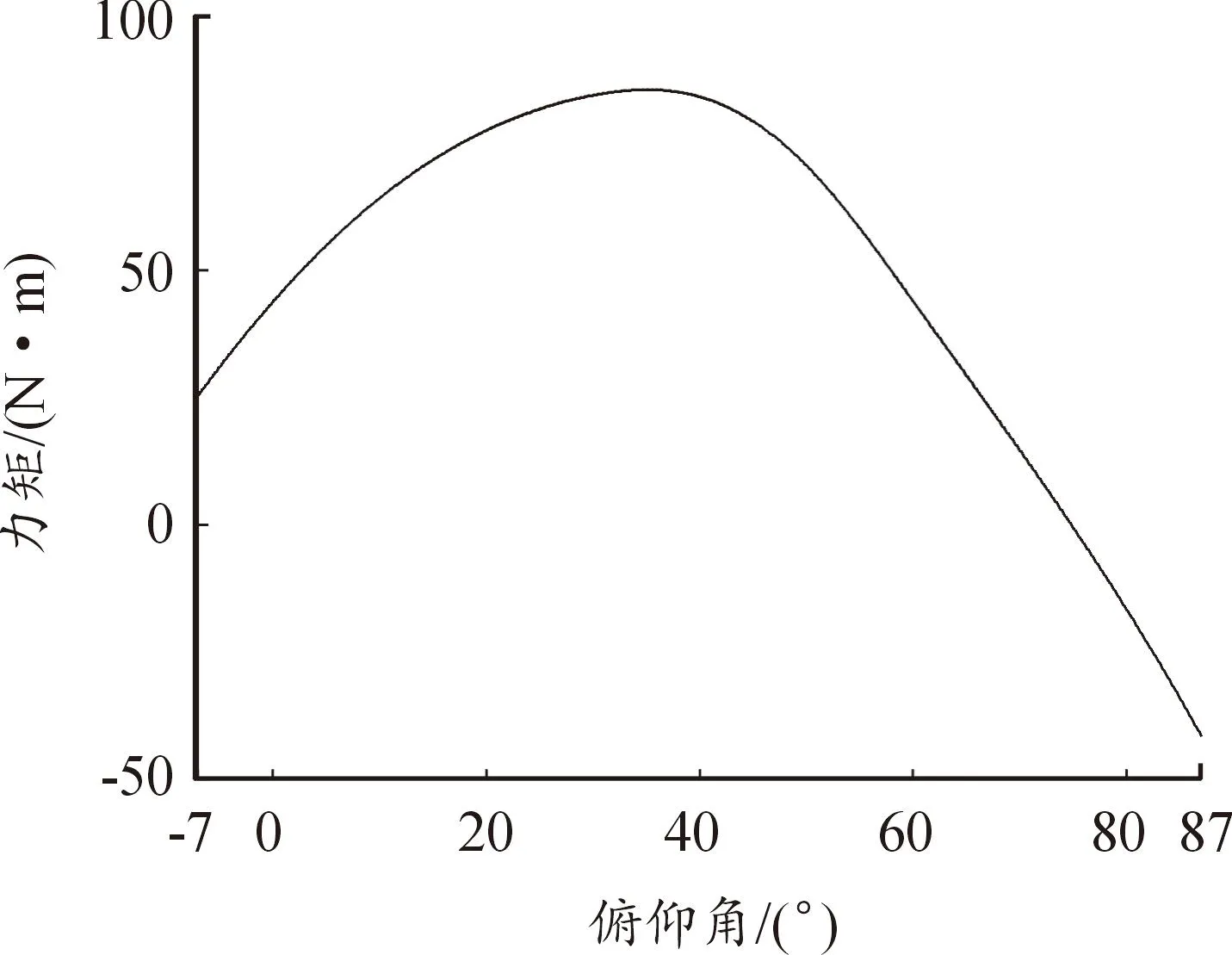
图3 不同俯仰角下的力矩残差
令方位轴总偏心力矩为Thr,俯仰轴总偏心力矩为Tpr

(21)
则双轴电机等效输出力矩可简化表示为

(22)
3 仿真分析
3.1 仿真条件
自行高炮稳定指向动力学模型主要输入包括车体姿态信息、n系目标指向信息、b系原点平动信息,根据建立的动力学模型进行仿真,分别分析车体摇摆但无平动、车体平动但无摇摆、车体同时做平动和摇摆这3种情况下的自行高炮执行稳定跟踪所具有的动载荷偏心力矩和输出力矩,仿真流程如图4所示。由于自行高炮稳定跟踪系统的物理结构特性,只需考虑方位轴力矩在zh轴的有效分量和俯仰轴力矩在yp轴的有效分量。

图4 自行高炮稳定跟踪系统动力学仿真流程图
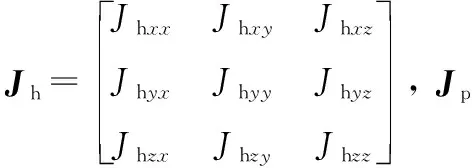
不考虑静摩擦转矩,自行高炮稳定指向系统的主要机械结构参数为:mh=4 000 kg,mp=1 100 kg;xbh=0 m,ybh=0 m,zbh=-1 m;xhG=0.25 m,yhG=0 m,zhG=-0.1 m;xhp=0.3 m,yhp=0 m,zhp=-0.2 m;xpG=0.4 m,ypG=0 m,zpG=0 m;bhz=-90 N·m/rad,bpy=-40 N·m/rad;方位炮塔与自行高炮身管在各自旋转中心下的惯性张量为
文献[6]已详细讨论了车体姿态角变化幅值、车体姿态角变化频率,以及不同相位条件下分别对自行高炮高低轴和方位轴输出力矩的影响,得到了载体姿态角变化幅值越大,频率越大,双轴输出力矩也越大的结论。如无特殊说明,本文引入的车体姿态角干扰均满足以下条件:车体姿态角φ、θ、ψ的变化周期为2 s,变化幅值为7°,无相位差(即φ=θ=ψ=7sin(πt))。
3.2 车体摇摆但无平动时的力矩分析
3.2.1稳定时俯仰指向角对双轴力矩的影响
假设车体坐标系原点的平动速度恒为零,给定惯性坐标系下的方位指向角为0°(βn=0°),俯仰指向角分别为15°(即εn=15°,下同)、30°、45°、60°时,所得的方位和俯仰轴力矩分别见图5、图6,其中Thr为方位轴动载荷干扰力矩,Th为方位轴电机等效输出力矩,Tpr为俯仰轴动载荷干扰力矩,Tp为俯仰轴电机等效输出力矩。由图5、图6可知,当俯仰指向角分别为15°、30°、45°、60°时,方位轴动载荷峰值分别为1 515、1 550、1 596、1 663 N·m,约为对应输出力矩峰值的45%、75%、120%、33%;俯仰轴动载荷峰值分别为290、481、646、778 N·m,约为对应输出力矩峰值的82%、86%、89%、92%。

图5 不同俯仰指向角下的方位轴力矩

图6 不同俯仰指向角下的俯仰轴力矩
随着俯仰指向角的增加,方位轴和俯仰轴的动载荷峰值均有所增加,方位轴动载荷受俯仰指向角影响较小,在车体仅做摇摆运动时对输出力矩的影响有限,随着俯仰指向角的增大,炮塔坐标系的角速度及角加速度会急剧变大,使得方位轴的旋转运动惯性力矩成为输出力矩的主导项之一,总偏心力矩与旋转运动惯性力矩抵消,改变了输出力矩峰值的大小以及出现的时间。俯仰轴的平衡机抵消了大部分由重力产生的静态偏心力矩,且稳定指向时旋转运动惯性力矩接近0,输出力矩主要由动载荷主导,故动载荷和输出力矩大致呈现同样的变化趋势,两者的峰值较为接近。
3.2.2动态跟踪时双轴力矩的变化
当方位指向角变化幅值为60°,俯仰指向角变化幅值为30°,周期为2π s,所得的方位和俯仰轴力矩分别见图7、图8。由图7、图8可知,当方位角和俯仰角指向均随时间变化时,方位轴动载荷峰值约为输出力矩峰值的25%,俯仰轴的动载荷峰值约为输出力矩峰值的62%。

图7 动态跟踪时的方位轴力矩
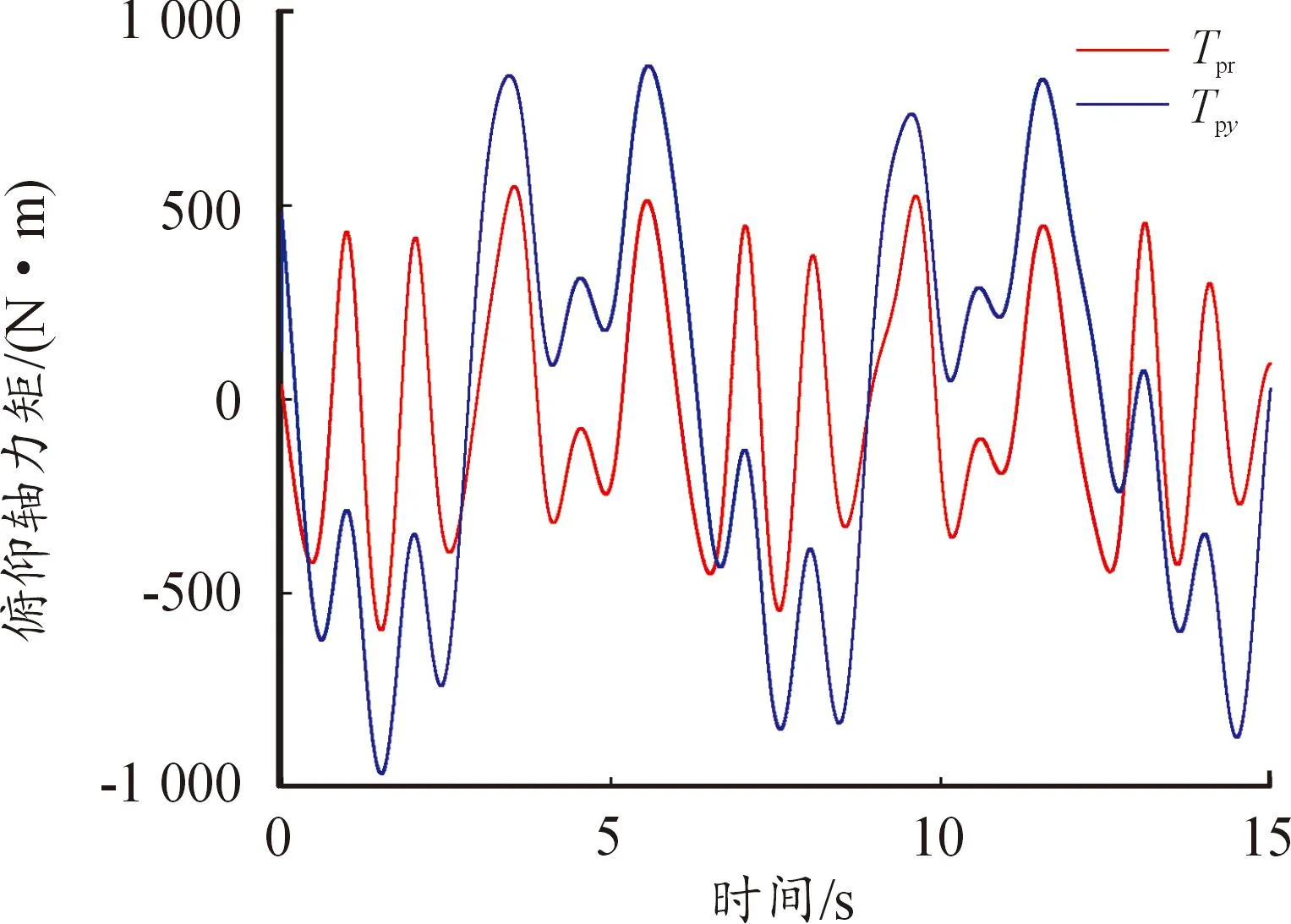
图8 动态跟踪时的俯仰轴力矩
动态跟踪指向时,俯仰轴的动载荷、静态偏心力矩以及旋转运动惯性力矩共同影响了输出力矩,动载荷峰值与静态指向时基本相同;俯仰轴的平动惯性力矩增加明显,动载荷峰值相较于静态指向时有一定增大。俯仰轴和方位轴的旋转角速度及角加速度相对于静态指向时变化幅值更大,导致双轴旋转运动惯性力矩大幅增加,叠加上双轴各自的动载荷和静态偏心力矩后,方位轴和俯仰轴的输出力矩都有了明显的增加。
3.3 车体平动但无摇摆时的力矩分析
3.3.1无姿态扰动时车体平动对双轴力矩的影响
车体在无姿态扰动条件下做水平运动,在车体无侧滑的情况下(车体坐标系原点平动速度在yb、zb轴的分量为0),给定俯仰指向角为45°,方位指向角分别为15°,车体的初始平动速度为10 m/s,叠加周期为2 s,幅值分别为0、2、4、6 m/s2的余弦加速度信号,得到图9、图10所示的双轴力矩曲线。由图9可知,当方位角指向为15°时,加速度幅值每增加2 m/s2,方位轴输出力矩峰值增加约679 N·m,动载荷峰值增加约518 N·m,动载荷峰值约为输出力矩峰值的76%;加速度幅值每增加2 m/s2,俯仰轴的动载荷与输出力矩峰值增加约622 N·m,动载荷峰值约为输出力矩峰值的95%。

图9 车体仅做平动时的方位轴力矩

图10 车体仅做平动时的俯仰轴力矩
当车体仅做匀速运动时,俯仰轴的总偏心力矩和输出力矩皆为身管重力偏心力矩被平衡机补偿后的残差,恒为-75 N·m。引入车体加速度干扰后,联立式(15)、式(19)可知,俯仰轴力矩中的有效项仅为动载荷和重力偏心力矩残差,且动载荷和加速度大小呈正比。当方位指向角为0°时,上述情况下俯仰轴对方位轴的反作用力矩-Tp在zh轴的有效分量恒为0,故方位轴的动载荷和输出力矩恒为0。当方位指向角为15°时,此时炮塔偏心坐标和加速度方向不位于同一直线,同时受到来自俯仰轴的反作用力,故方位轴的动载荷峰值和输出力矩峰值均与加速度幅值呈正比。
3.3.2动态跟踪时双轴力矩的变化
车体在无姿态扰动条件下做水平运动,在车体无侧滑的情况下,车体的初始平动速度为10 m/s,叠加周期为2 s,幅值为2π m/s2的余弦加速度信号,当方位指向角变化幅值为60°,俯仰指向角变化幅值为30°,周期为2π s时,所得的方位和俯仰轴力矩分别见图11、图12。由图11、图12可知,当方位角和俯仰角指向均随时间变化时,方位轴动载荷峰值约为输出力矩峰值的72%,俯仰轴动载荷峰值约为输出力矩峰值的95%。相比车体只做摇摆的情况,方位轴的动载荷峰值和输出力矩峰值分别增加了约1.6倍、7.1倍,俯仰轴的动载荷峰值和输出力矩峰值分别增加了约3.3倍、6.4倍
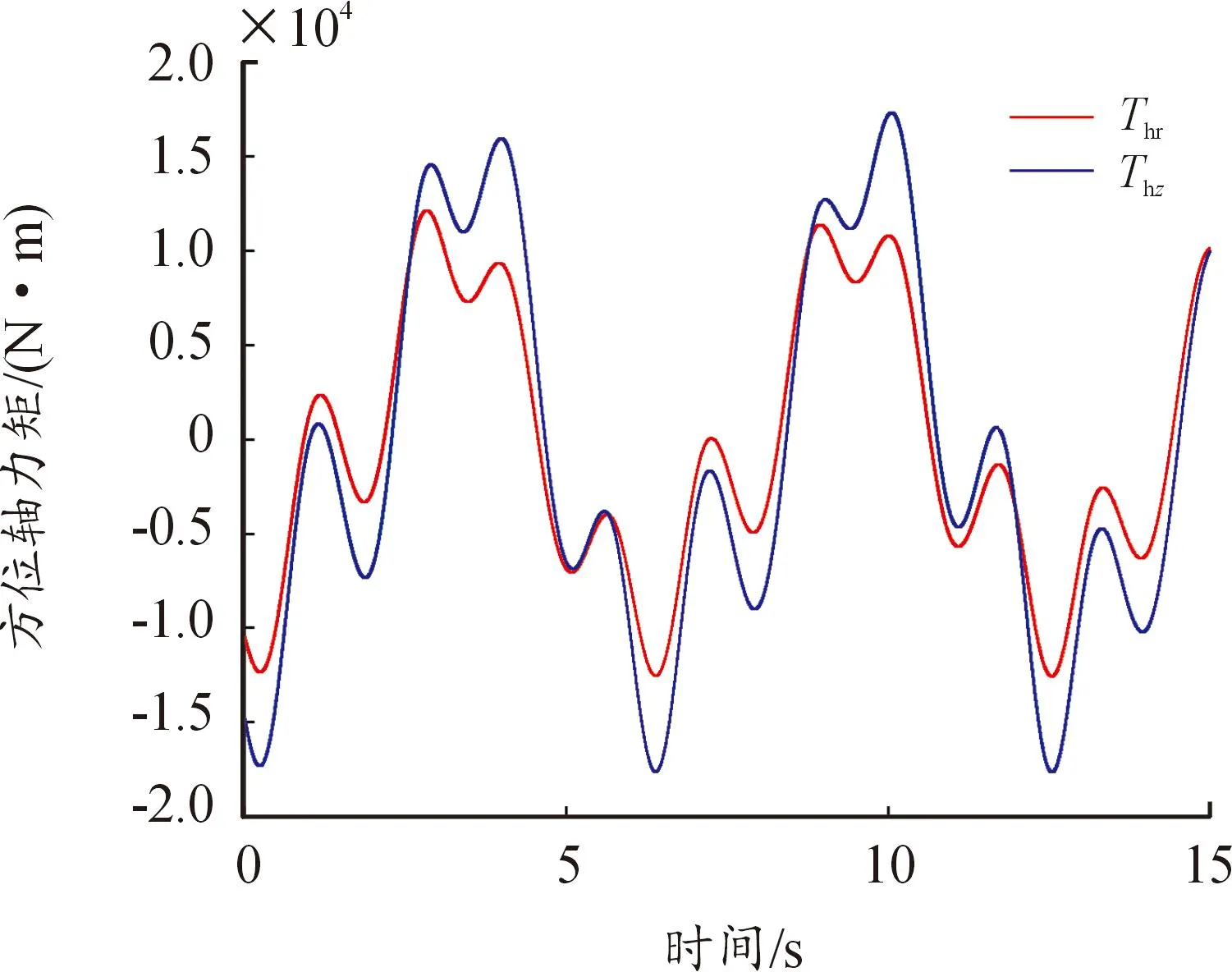
图11 动态跟踪时的方位轴力矩
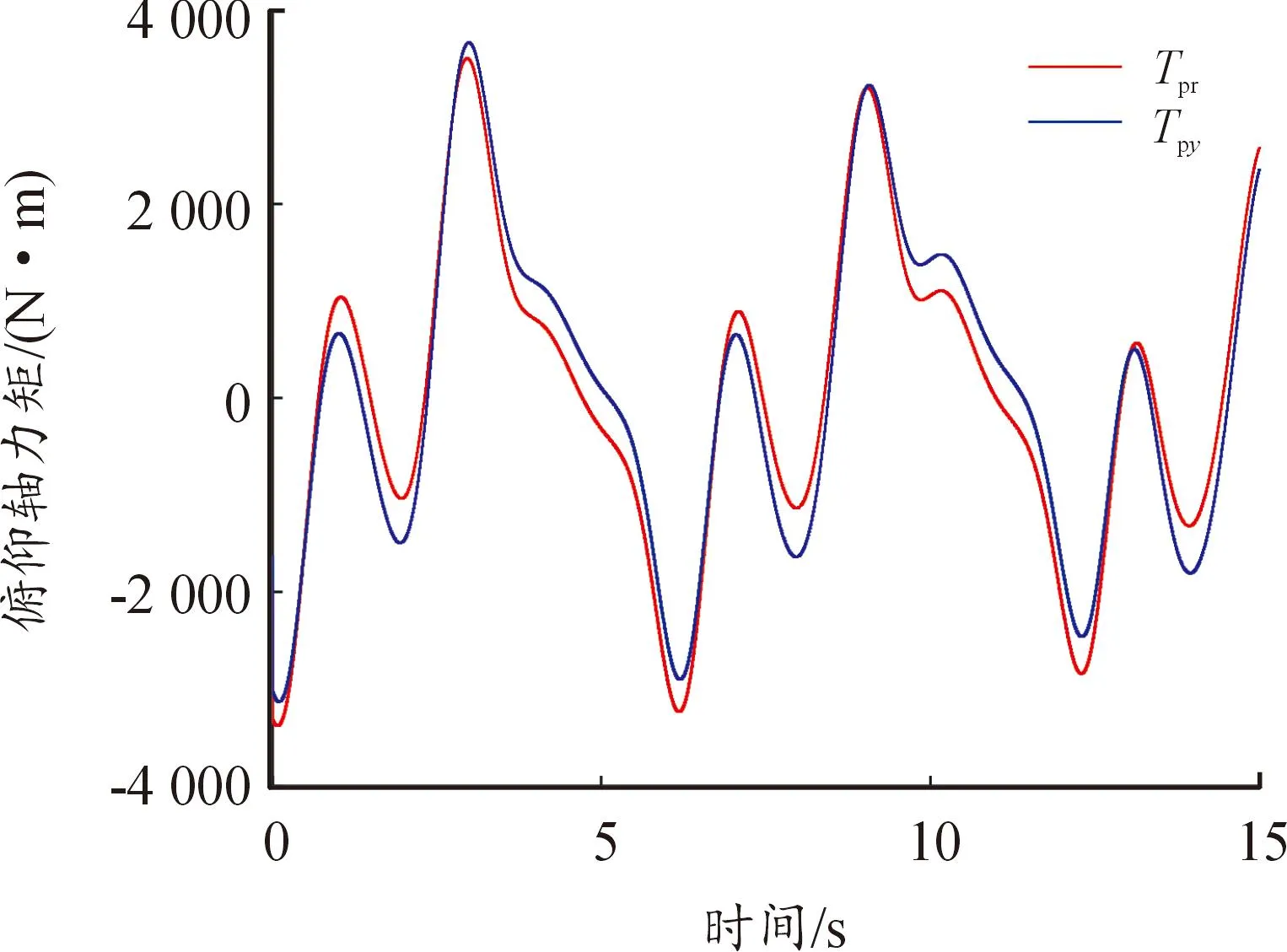
图12 动态跟踪时的俯仰轴力矩
在车体仅做平动运动时进行动态跟踪指向,方位轴由重力产生的静态偏心力矩恒为0,仅有旋转运动惯性力矩和动载荷影响输出力矩,该情况下俯仰轴的动载荷增幅明显,主导了输出力矩的变化,俯仰轴动载荷对输出力矩的影响更大,峰值与其输出力矩更为接近。
3.4 车体复合运动时的力矩分析
3.4.1存在姿态扰动时车体平动对双轴力矩的影响
车体存在姿态角扰动,无侧滑且无下坠,给定俯仰指向角为45°,方位指向角为0°,车体的平动速度分别为5、10、15 m/s时,所得的力矩见图13、图14。可知,方位轴动载荷峰值分别约为输出力矩峰值的68%、71%、74%,俯仰轴动载荷峰值分别约为输出力矩峰值的91%、94%、96%。平动速度每提高5 m/s,方位轴动载荷峰值和输出力矩峰值分别增加约2 350、3 100 N·m,俯仰轴动载荷峰值和输出力矩峰值增加约580 N·m。
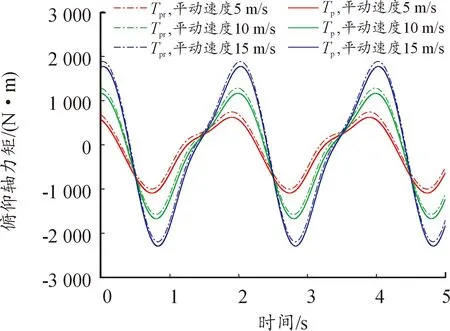
图14 不同车体平动速度下的俯仰轴力矩
由运动产生的动载荷大小直接受车体平动速度大小的影响,平动速度越大,双轴的动载荷和输出力矩的峰值越大,并且由于在稳定条件下俯仰轴的旋转运动惯性力矩极小,平动状态下俯仰轴的输出力矩完全由动载荷所主导。
3.4.2车体加速度幅值对双轴力矩的影响
车体存在姿态角扰动,无侧滑且无下坠,给定俯仰指向角为45°,方位指向角为0°,车体的初始平动速度为10 m/s,给以周期为2 s,幅值分别为2、4、6 m/s2的余弦加速度信号,得到如图15、图16所示的双轴力矩曲线。可知,方位轴的动载荷峰值分别约为对应输出力矩峰值的68%、70%、71%,俯仰轴的动载荷峰值分别约为对应输出力矩峰值的93%、92%、91%。
相对于车体无加速度的情况,仅双轴力矩各自的动载荷发生了变化,由于动载荷同时受双轴角速度与车体坐标系原点速度的影响,在不同相位的车体平动加速度干扰下,方位轴的动载荷和输出力矩的峰值会有较大差别,文中采取的仅为其中的一种情况,相位的影响较为复杂,此处不做深入探讨。

图15 不同车体加速度幅值下的方位轴力矩

图16 不同车体加速度幅值下的俯仰轴力矩
3.4.3行进间跟踪动态目标时双轴力矩的变化
车体存在姿态角扰动,无侧滑且无下坠,车体的初始平动速度为10 m/s,给以周期为2 s,幅值为2π m/s2的余弦加速度信号,当方位指向角变化幅值为60°,俯仰指向角变化幅值为30°,周期均为2π s时,所得的方位和俯仰轴力矩分别见图17、图18。可知,在自行高炮行进间跟踪动态目标时,方位轴动载荷峰值约为输出力矩峰值的76%,俯仰轴的动载荷峰值约为输出力矩峰值的92%;相比车体只做摇摆的情况,方位轴的动载荷峰值和输出力矩峰值分别增加了约2.5倍、6.9倍,俯仰轴的动载荷峰值和输出力矩峰值分别增加了约3.2倍、6.3倍。
在行进间跟踪且车体存在姿态干扰的情况下,双轴的动载荷主导了各自输出力矩的变化,且相对于车体无平动时的情况,双轴的动载荷和输出力矩均有极为明显的增幅。

图17 行进间保持动态跟踪时的方位轴力矩

图18 行进间保持动态跟踪时的俯仰轴力矩
4 结论
对自行高炮稳定跟踪系统双轴力矩进行了系统分析,建立了双轴稳定跟踪系统欧拉动力学方程,结合典型系统结构参数进行了动力学仿真,分析了带有平衡机情况下的自行高炮车体姿态角与平动速度对双轴的动载荷和输出力矩的影响,得到了以下结论:
1) 车体仅做摇摆运动且指向角稳定时,俯仰指向角的大小对双轴力矩有直接影响,双轴的动载荷随着俯仰角增大而变大,俯仰轴的输出力矩由其动载荷主导,方位轴的动载荷对方位轴输出力矩的影响较为有限;
2) 车体仅做平动运动且指向角稳定时,双轴的动载荷均与车体加速度的大小呈正比,俯仰轴的输出力矩与其动载荷近似,方位轴的输出力矩仅受俯仰轴的反作用力以及自身动载荷的影响;
3) 车体平动且摇摆时,双轴的动载荷和输出力矩都随平动速度增大而明显增大,双轴的动载荷主导了各自输出力矩的变化;
4) 无论是否存在车体姿态扰动,自行高炮行进间跟踪相比无平动条件下跟踪,其双轴的总偏心力矩和输出力矩都有极大幅度的增加,且行进过程中动载荷对输出力矩的影响更为明显。
5) 质量偏心与运动耦合产生的动载荷干扰力矩会给自行高炮行进间稳定跟踪带来极大的负面影响,影响稳定跟踪系统的精度,在设计时应当尽量减少质量偏心。
6) 双轴力矩的量化分析对电机的匹配选型有重要的参考价值,可考虑引入力矩补偿来提高稳定跟踪闭环系统的性能,这对设计和优化自行高炮稳定跟踪系统控制器具有重要的研究意义。
猜你喜欢
黑龙江气象(2021年2期)2021-11-05
军事文摘(2020年15期)2020-08-15
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
现代兵器(2017年4期)2017-06-02
电力系统及其自动化学报(2016年5期)2016-12-01
照明工程学报(2016年3期)2016-06-01
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
焊接(2015年9期)2015-07-18
