非接触式掌纹图像采集装置的研究*
2010-05-18 07:28苑玮琦
网络安全与数据管理 2010年1期
苑玮琦,董 康
(沈阳工业大学 视觉检测技术研究所,辽宁 沈阳 110178)
随着社会的迅速发展,生物特征识别技术已经逐渐应用到人们的日常生活中,身份鉴别和验证已经成为现代社会必不可少的安全措施。掌纹识别由于其易于被用户接受、具有丰富且稳定的信息以识别个体、识别系统的硬件标准化程度比较高、识别速度快能够达到实时识别的需要等特点,被广泛地应用在生物识别领域[1]。
掌纹图像的采集方式主要有离线采集和在线采集2种[2]。在线采集由于其速度快和实时性,优势明显大于离线采集。目前,在线采集的方法基本是接触式的,用卡槽、立棍等方法来固定手掌的位置,然后在装置盒里采集图像。这些完全拒绝自然光的方法减少了噪声,但是却禁锢了用户,存在以下缺点:(1)每次采集都要花很长时间来摆放手掌的位置;(2)由于是接触式的容易有细菌的传染,不易被接受;(3)由于每次采集到的图像都是部分手图像,所以不易和其他生物特征相结合;(4)偏离了掌纹识别在实际生活中的运用。在这种情形下,本文提出一种非接触掌纹图像采集装置,用户不用接触任何定位物件,只需将手伸到摄像头近前,就能完成采集工作。本系统是基于摄影技术中的伞灯原理,光源部分由主光源和辅光源组成。虽然将摄像机和光源从采集盒里移出来带来了光噪声、视角、硬件电路设计等问题,但本装置成功地解决了这一系列的问题。
1 非接触采集装置的光源设计
不仅在摄影技术中光被广泛运用,在生物识别里光也占据着举足轻重的地位。利用摄影技术中的伞灯原理,本装置有1个主光源,2个辅光源。摄像头、滤光片、匀光板一起构成主光源,如图1所示。辅光源根据伞灯原理制作而成(图1中辅光源的匀光板已移除)。
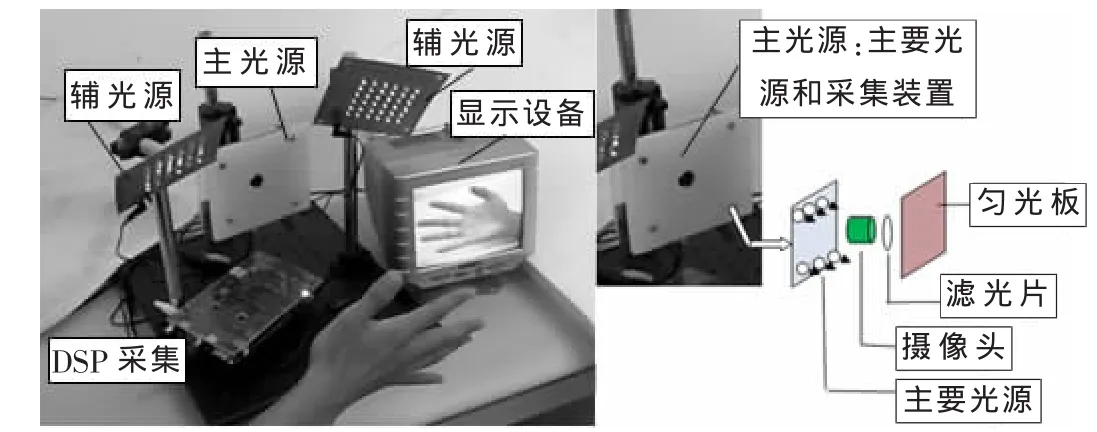
图1 装置实物图与采集装置分解图
1.1 光线较暗和光照角度的解决
以往的采集是在采集盒里进行的,采集盒将所有的自然光屏蔽,用自身光源照明。将采集盒移除必然带来光噪声的干扰,所以本系统的光源不仅要照明还要解决干扰问题。
如图1所示,摄像头垂直照向手掌,这样得到的图像易于做算法处理,此时如果光源也垂直照向手掌时,反射光也垂直反射回来,刚好照到摄像头里,这样的点就较亮,得到的图像会有光斑;如果光源呈30°角照向手掌,则不会出现这种情况,光线照射如图2所示。
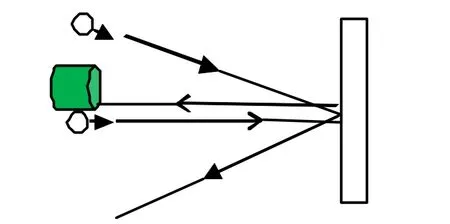
图2 光线照射示意图
把光源平着照向手掌(0°照射)时部分掌纹又会被手掌的凸起部位遮挡。所以通常采用30°~60°来成像。图3分别为照射光源以 0°、30°、90°照向手掌时的成像图。从图中可以看出,30°的照射效果明显好于0°和 90°的。

图3 照射光角度对比图
1.2 照射光颜色的选择
波长越长的色光越容易发生衍射现象,反之容易留下阴影。在做掌纹的采集时照射光在屈肌纹处留下的阴影越暗,即掌纹和手掌的对比度越大,越有利于图像的识别,因此选取波长较短的光。在可见光中红光的波长最长紫光的最短,可是市面上的紫光二极管并不多见且成本太高不符合本系统的低成本的要求,而价格低廉的蓝光二极管已经符合本装置的硬件条件。
由瑞利判据[3]可知:当1个爱里斑的中心与另1个爱里斑的第1级暗环重合时,刚好能分辨出是2个图像,2个图像中心之间的距离即分辨极限为:I=1.22λk/d,其中λ为照射光的波长,k为系数因子,d为镜头里的镜片直径。当采用白光光源照明时,光源的平均波长可等效为550 nm;而采用430 nm的蓝光做照明光源时,分辨率提高了1.28倍多,与波长为650 nm的红光相比则提高了1.51倍,所以本实验中选用蓝光作为照射光。图4(a)~图4(c)分别为红光、白光和蓝光照射手掌的比对图,图 4(d)~图 4(f)分别是图 4(a)~图 4(c)的局部放大图,可以看出,对于手掌细纹的捕捉蓝光较占优势。
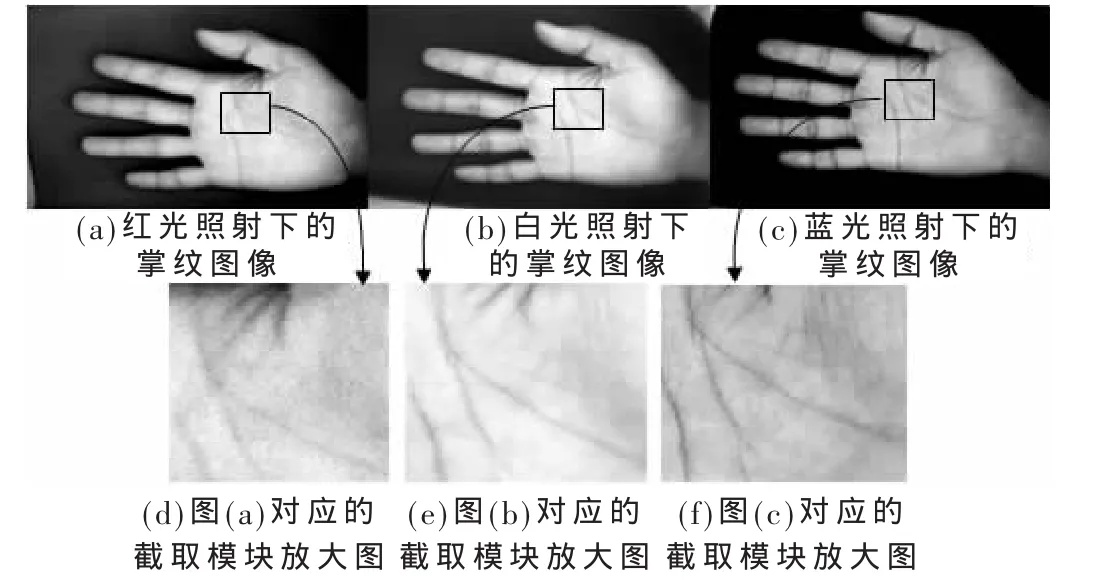
图4 不同色光照射手掌对比图
1.3 照射光不匀的解决
1.3.1 匀光二极管的选择
本设计中采用的是由LED发光二极管构成的环形光源,选取二极管的标准是匀光度及照射角度。现在市场的二极管主要有草帽头、圆柱平头、子弹头、尖头4种,其匀光度、照射距离也各不一样。图5是4种二极管的光打在白纸上的匀光度的比较,可以看出草帽头二极管的光比较均匀。
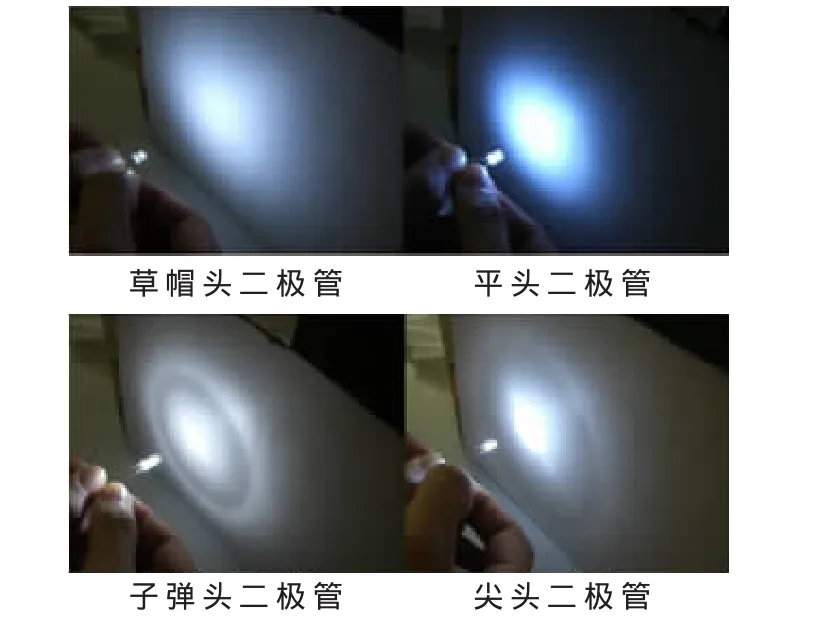
图5 4种二极管匀光比对
照射角度方面草帽头和平头二极管的照射角度是120°,而子弹头和尖头的照射角度是30°。在本装置中要做匀光光源,因此从光匀度和照射角度这2个原因,本系统选取草帽头二极管作为光源。
1.3.2 匀光板的使用
因为二极管是点光源不可能给出完全均匀的面光源,所以在本装置中,光源的外面加了匀光板(又称导光板),通过各种疏密、大小不一的导光点,使导光板均匀发光,从而将线光源或点光源(荧光灯管或 LED)转变为面光源。图6是点光源到面光源的变化图。
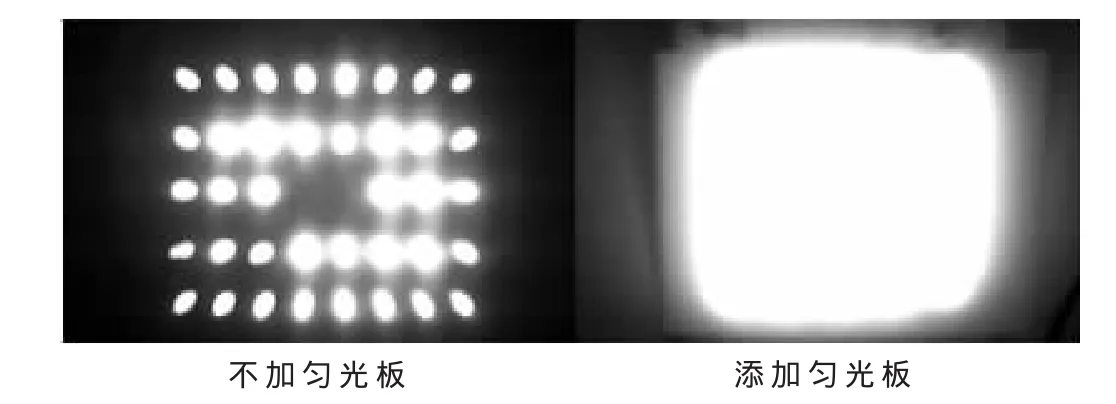
图6 添加匀光板效果变化图
1.4 顺光和外界光太强的解决
顺光和外界光强都会造成成像困难,所以要尽量减少外界光的影响。因本装置的采集是在蓝光下完成,所以在摄像头前加1个带通的滤光片,这样可以消除大部分的外界光的干扰又不会给本装置的光源色光带来影响。加滤光片的效果图如图7所示。
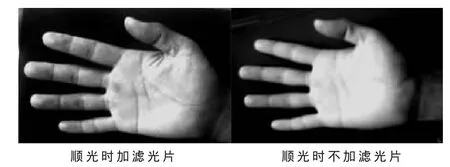
图7 加滤光片的效果比较图
蓝光的波长范围是410~470 nm,所以滤光片用的是DBT430,中心波长为 430 nm,半带宽为 40 nm,这样就减少了带通范围以外色光的干扰。
2 采集装置的选取
从接触式到非接触的转变,必然存在视角问题,因此,非接触式必须选择合适的传感器和镜头才能完整清晰地捕捉整个掌纹图像。
2.1 非接触的理论依据
每一个镜头成像的原理都是利用凸透镜,在焦点前后各有1个容许弥散圆,这2个弥散圆之间的距离称为景深[4],即在被摄主体(对焦点)前后,其影像仍然有一段清晰范围(即景深)。
如图8所示,L1加上L2的距离就是景深,被拍摄物体在这个范围内的图像都是清晰的,因为在容许弥散圆内的点都是小于传感器的最小分辨率。景深与镜头的光圈成反比,光圈F=f/D,其中,f为镜头焦距,D为镜头光孔直径。作为定焦镜头,可以靠调节光孔直径来调节景深,本系统的镜头景深最大可以调节到30 cm。
基于这个原理只要手掌在这个范围内波动,都可以采集到较清晰的图像。这样在采集过程中,采集者不用把手固定,只要在一定的范围内就能顺利地完成非接触采集工作。
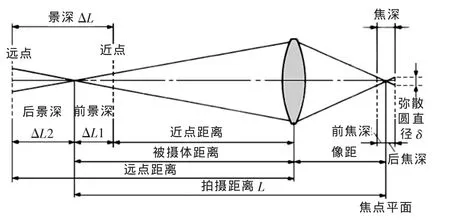
图8 镜头景深示意图
2.2 摄像头的传感器选择
摄像头的选取主要有3个标准:光谱相对响应、景深、视角,其中光谱相对响应是由传感器决定的,而景深和视角是由镜头决定的。
在本采集系统中所用的照射光由中心波长为430 nm的蓝色二极管发射,所以要求所用的摄像头对蓝色光的相对响应要较高。本系统采用的是一款可见光传感器PO188。大多数传感器因为要兼顾红外光其最敏感波长通常为800 nm左右,这样不利于蓝光照射的采集工作。PO188是 30万像素的 CMOS传感器,支持 640×480的VGA模式,每秒可以拍摄30帧图像,典型入射波长为λp=520 nm,可见光范围内高度敏感,输出电流随照度呈线性变化。在光波长为430 nm时其相对响应为60%,且暗电流小,低照度响应灵敏度高,符合本装置的要求。
2.3 摄像头的镜头选择
人的手以男性的较大,按照较大的手估算:长约20 cm、宽约 12 cm(含大拇指),如果是自然放松状态下宽约为15 cm,长宽再各自放宽3 cm,这意味着要在保证清晰的情况下将1个长23 cm、宽18 cm的图片完全捕捉到视角范围内。
PO188的镜头是1/3英寸、焦距f为8 mm的定焦镜头,其光圈指数 F为 1:1.2,理论视角为 90°(镜头的理论视角指的是1个圆形的覆盖面)。在实际应用时无论是通过采集卡界面显示还是在CCS界面上显示,都是方形的。所以必须由公式α=2arctan(L/2H)重新测出实际视角,本系统水平视角为87°,竖直视角为 62°。当手离摄像头15 cm时,视野范围为 28 cm×18 cm,已能捕捉整个手的图像,且在景深的范围之内。
3 硬件电路的设计
以往的接触式掌纹采集,由于手掌是固定的,所以要找出屈肌纹区域只要采 200 bit×200 bit×8 bit大小的图像就能完成识别工作。而本系统中的非接触不能确定屈肌纹区域所在位置,要利用手形定位,所以采集的范围相对较大 ,1 幅图像为 640 bit×480 bit×8 bit, 约占用300 KB的空间,而且系统还需要对图像进行大量预处理的计算和中间图像的暂存,需要使用存储量大且速度快的外扩存储器。由于DSP的内部RAM只有240 KB(L1112 KB和L2128 KB),所以系统外扩了 512 MB的 Flash和64 MB的DDR2,掌纹特征的获取运算主要在外扩的DDR2中进行。
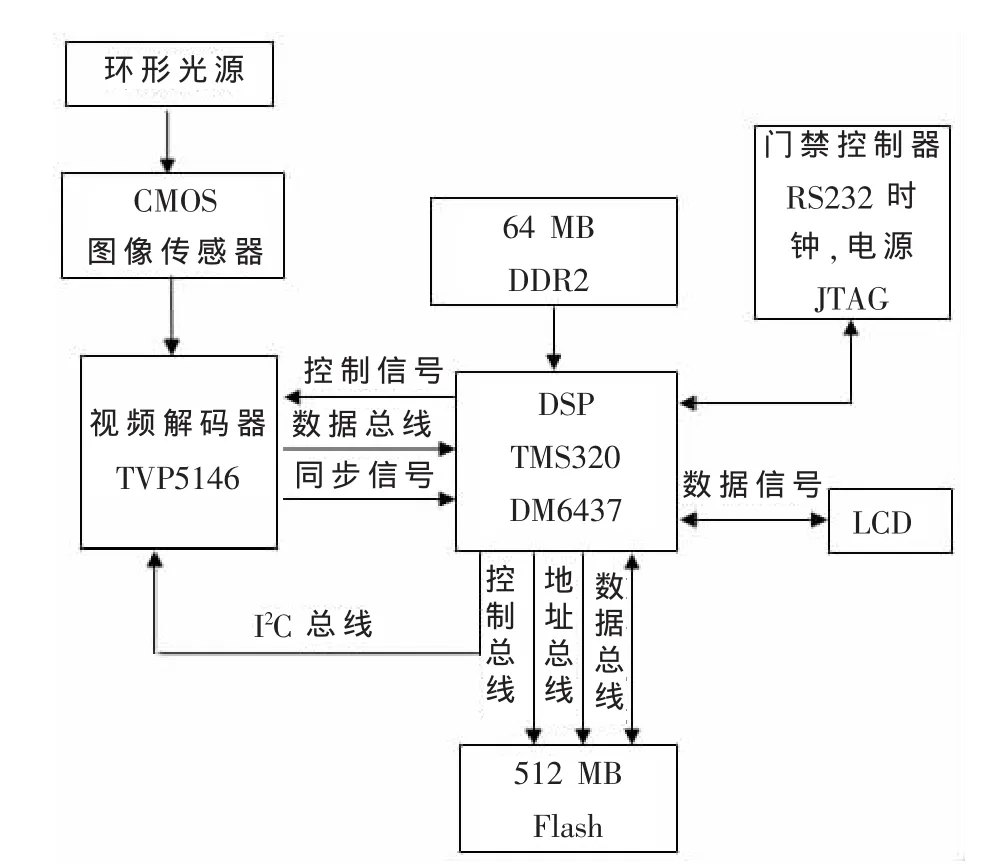
图9 外围芯片
本系统的硬件设计电路主要以TMS320DM6437为核心,外围芯片如图9所示。加电后首先进行系统初始化及引导,将存储在Flash中的程序及数据加载到DDR2中。其中数据主要包括人的掌纹特征向量和比对模板等信息。通过按键中断给DSP 1个中断信号,利用I2C总线控制图像传感器采集图像,采集的图像传到外扩DDR2中,程序在此处理图像后获得掌纹特征,最后将掌纹特征向量与模板比对,给出识别结果。根据识别的相似度阈值,DSP会通过多通道缓冲口给LCD发送相应信号,LCD将识别结果显示出来。
针对现有的掌纹采集的不足之处,在保证采集掌纹图像清晰的基础上,本文提出一种基于DSP的非接触掌纹采集方式,这种装置更接近于掌纹识别在现实生活中的运用,而且由于其非接触的特点易被用户接受。整个设计电路简单、稳定性好、速度较快,实验证明有较高的识别率。本系统还可以和手形采集相结合。
[1]黎明,严超华,刘高航.基于掌纹图像分析的身份识别系统[J].中国图像图形学报,2000,5(2):134-137.
[2]卢光明.掌纹识别系统关键技术与算法研究[D].哈尔滨:哈尔滨工业大学,2005.
[3]王志波,王鹏.瑞利判断与斯托列尔准则[J].光子学报,2000,29(7):621-625.
[4]NARAYANSWAMY R,SILVEIRA P E X.Extended depthof-field iris recognition system for a workstation environment[C].Proceedings of SPIE 2005,2005:41-50.
猜你喜欢
广东工业大学学报(2022年3期)2022-05-26
成都信息工程大学学报(2021年4期)2021-11-22
儿童故事画报(2019年12期)2019-01-07
小学生导刊(2018年22期)2018-08-21
中学生百科·小文艺(2017年9期)2018-02-05
红岩(2017年6期)2017-11-28
小溪流(画刊)(2017年1期)2017-03-16
中国中医药现代远程教育(2014年11期)2014-08-08
数码摄影(2009年8期)2009-10-14
电影评介(2009年9期)2009-05-13