波状摆动式鱼类的推进性能研究
2010-06-07 02:52丛文超王志东李力军
中国舰船研究 2010年4期
丛文超 王志东 李力军
江苏科技大学船舶与建筑工程学院张家港校区,江苏张家港 215600
波状摆动式鱼类的推进性能研究
丛文超 王志东 李力军
江苏科技大学船舶与建筑工程学院张家港校区,江苏张家港 215600
以开发适用于小型潜器的仿生操纵与推进系统为研究背景,利用计算流体动力学软件Fluent对波状摆动式鱼类进行了数值模拟,建立波状摆动式鱼类的数值计算模型,研究不同变形参数对鱼类推进性能以及尾涡流场结构的影响。结果表明,随着波长的增加,鱼类能够获得更好的推进性能。通过对比不同频率下鱼类推进性能以及流场结构,探讨不同滑移率及斯特劳哈尔数对推进性能影响。
鱼类;波长;斯特劳哈尔数;水动力性能;流场结构
1 引言
水生动物经过几亿年的漫长进化发展出各具特色的水下游动能力,既可以在持久游速下保持低能耗,也可以在爆发游速下产生快速机动响应,是当前普遍采用螺旋桨推进的水面或水下航行器所无法比拟的。水生动物的运动方式可以分为纤毛推进、射流反冲推进、波状摆动推进。其中波状摆动推进是各类水生动物最广泛采用的一种游动方式,所谓波状摆动推进是指其身体作横向扭曲往复摆动,以横向行进波的形式沿身体传播。按鱼体及其背鳍、腹鳍和尾鳍的波状游动特点,可以将鱼类波状摆动推进方式划分为多种运动模式。但如果只顾及鱼体的运动,按照 Lightill[1]的提法可划分为鳗鲡模式、鲹科模式及月牙尾推进模式。
对于鱼类波状摆动推进机理的理论研究和数值模拟,童秉纲等[2-3]建立了模拟鱼类游动的三维波动柔板理论,结合线性化的物面边界条件和平面尾流模型,采用势流理论的三维非定常涡格法在频率内求解,研究了鱼类的游动和推进机理。Liu和Kawachi等[4]利用蝌蚪模型分析三维波状游动模式的水动力和推进机理,给出了鱼类波状运动时尾涡流场与喷流推进的关系。Gilmanov和Sotiropoulos等[5]采用内置边条方法实现动边界的处理,并对鲭鱼进行了数值模拟,分析了滑移率U/V对尾流场结构以及水动力系数的影响。Borazjani和 Sotiropoulos[6]对鲹科运动模式(鲭鱼)进行数值模拟,指出雷诺数对鲹科类游动的水动力性能具有重要影响,给出了鲭鱼的三维尾涡流场结构,表明影响流场结构的因素主要是斯特劳哈尔数。Zhu和Wolfgang等[7]利用三维非线性无粘数值方法建立了三维仿鱼模型,探讨了仿鱼游动的涡控制机理。周林慧和王志东等[8-10]开展了二维和三维柔性摆动尾鳍水动力特性研究,探讨了斯特劳哈尔数、柔性系数和最大攻角等对尾鳍水动力性能及流场结构的影响。王志东,等[11]研究了尾鳍弦向展向变形对水动力性能以及涡流场结构的影响。陈宏,等[12]利用大摆幅细长体理论,结合水动力理论、能量守恒原理及效率理论,研究了仿生机器金枪鱼游动的力学机理,建立了机器金枪鱼的运动学物理模型,推导出动力学方程和效率计算公式。
实验研究方面,Sakakibara 和 Nakagawa 等[13]采用DPIV对活鱼周围流场进行直接测量,分析了尾部流场结构是由交替涡间曲折的射流构成。Jenniffer和George[14]基于鲭科鱼流线型身体和正型尾鳍,利用DPIV对不同尾鳍区域的尾迹结构进行了测试。
本文利用计算流体软件F luent对二维全鱼模型进行了数值计算,分析了不同波长,不同斯特劳哈尔数下全鱼模型的水动力性以及流场结构。
2 数值计算模型
2.1 控制方程以及数值计算方法
考虑粘性以及不可压缩流动,建立如下连续方程和运动方程:
上式中,ui(i=1,2)为流体运动速度;xi(i=1,2)为空间坐标;p为流体压强;t为时间;γ为运动粘性系数;γt=cμk2/ε 为湍流粘性系数;k 为湍流动能;ε为湍动能耗散率;cμ为常数;湍流模型采用SST k-w模型。
控制方程的求解基于有限体积法,扩散项和对流项采用具有三阶精度的QUICK格式离散,压力和速度的耦合则使用适合于瞬态问题求解的PISO算法,其中全鱼的变形模式则通过编制用户自定义程序实现。
2.2 数值计算模型以及边界条件
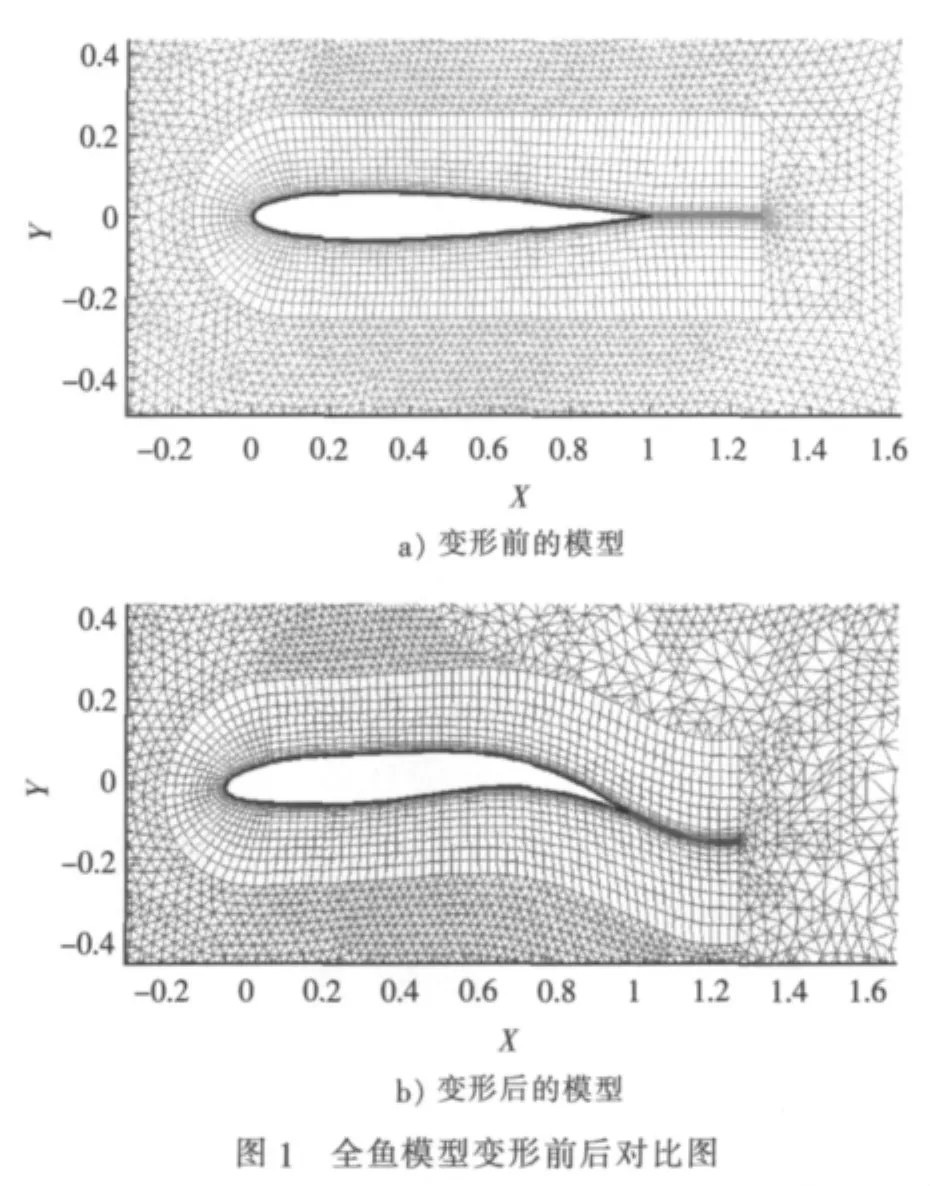
为了简化模型,采用NACA0012翼型来代替二维全鱼模型,计算区域为6L×22L,其中L为全鱼模型体长。综合考虑计算速度和计算精度,采用混合网格系统,网格数为22 260,同时为了更好地捕捉对柔性摆动水翼推进性能起重要作用的边界层内流动的变化,在水翼周围布置了结构网格,并在靠近壁面的地方进行了加密。对于边界条件的设定,左边界和上下边界定为速度入口,右边定为压力出口。图1给出了网格及鱼体变形示意图。
2.3 鱼类整体变形模型
鲹科鱼类的运动是以沿身体向后传送行进波来实现的,并且最大摆幅发生在鱼体尾部。Videler和Hess[15]以实验观测为基础,利用傅立叶数列描述了鲭鱼的波状摆动,并提出鱼体横向波动方程:

式中,x 为沿鱼体方向位置坐标,y(x,t)为 t时刻横向坐标位置;κ为波数,κ=2π/λ,其中λ为波长;ω 为圆频率,ω=2πf;a(x)为横向运动的幅值。

式中,a0= 0.02;a1= -0.08;a2= 0.16。图 2 给出了波长分别为0.95,1.3时鱼体体干线。在鱼体尾部摆幅达到最大值 amax=0.1,相对应的 ymax=0.1L (L 为体长)。 当 x=L/4 时,amax=0.01; 当 x=0,a (x)=0.02。
此外,鱼体运动参数定义如下:滑移率β=U/V=U/λf,其中 U 为来流速度,V 为波速 V=λ/T;斯特劳哈尔数St=fA/U,其中A为尾部最大横向距离,A=0.2ymax,f为摆动频率。

2.4 力系数、功率系数、推进效率的定义
定义全鱼的推力、力矩和功率等系数如下:


3 二维全鱼模型的数值计算
3.1 水动力系数计算
计算工况:取来流速度 1.2,波长分别取 0.95、1.3,频率分别取 0.6 Hz,1.2 Hz,1.5 Hz,1.8 Hz,2.1 Hz。
图3给出了在相同频率、相同速度下,不同波长的推力系数,通过比较可以发现波长为1.3时的推力系数明显大于波长为0.95时的推力系数,由此可以推出波速越快全鱼的推进性能越好。图4给出了相同来流速度、相同波长,不同滑移率下推力系数,从图中可以看出,当滑移率大于1时(即鱼体波动速度小于游动速度时)X方向的力为纯阻力,而当滑移率小于1时(即鱼体波动速度大于游动速度时)X方向的力为纯推力,这种现象与Gilmanov 和 Sotiropoulos[5]所提出的滑移率对推进性能影响是一致的,因此证明了本文计算的合理性。
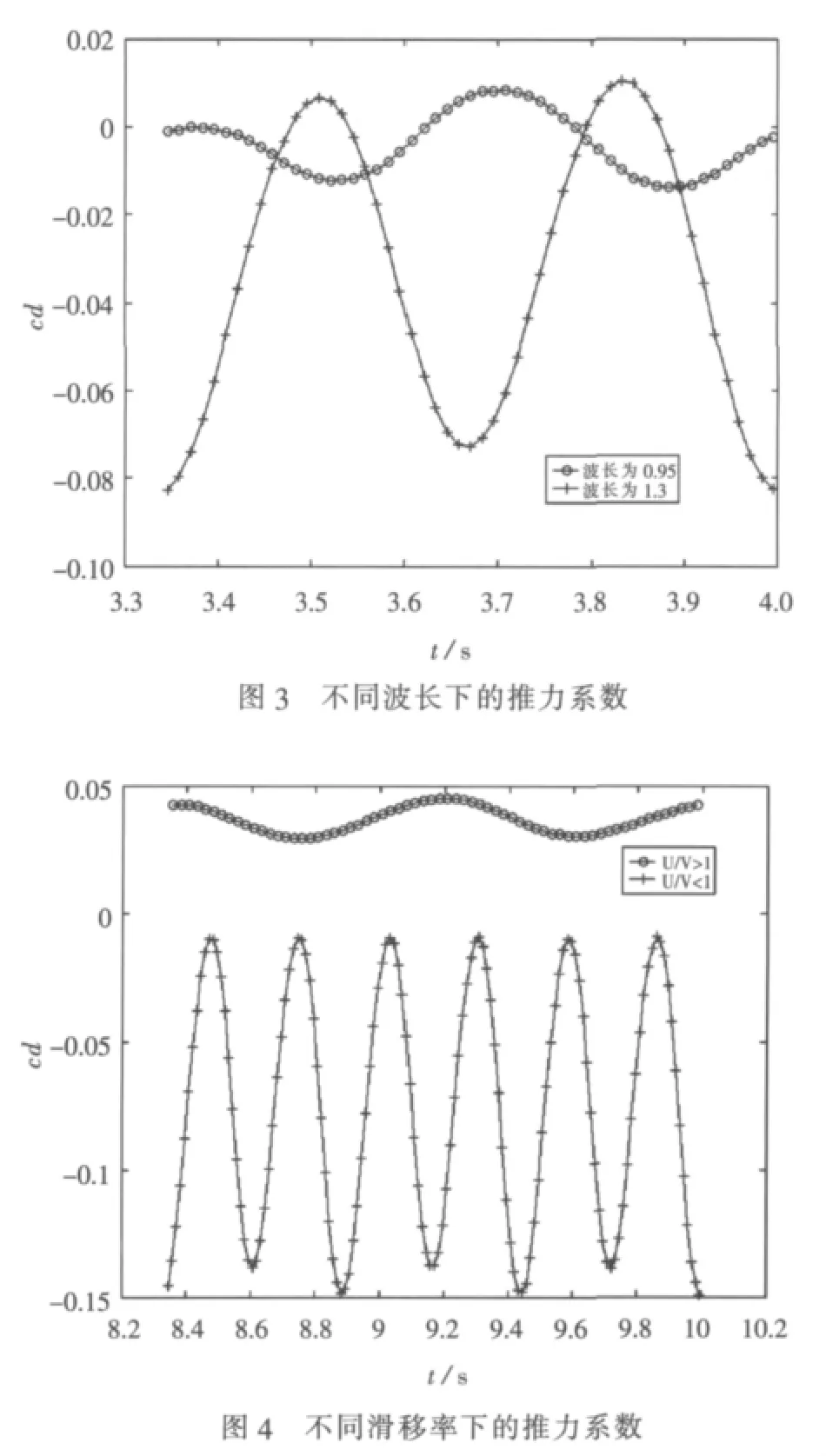
图5分别给出了不同波长下推力系数、频率随斯特劳哈尔数的变化曲线,由图5(a)可以看出在相同的St下,波长为1.3时的推力系数明显大于波长为0.95时的推力系数,并且在波长为1.3,St处于 0.1~0.18 范围内时,鱼体没有获得推力,并且发现在这个区域内推力系数变化趋势缓慢;当St位于 0.18~0.4 范围內时,鱼体获得了纯推力,同时推力系数增长较快, 且当St处于0.25~0.35之间时,鱼类的推进效率最佳。
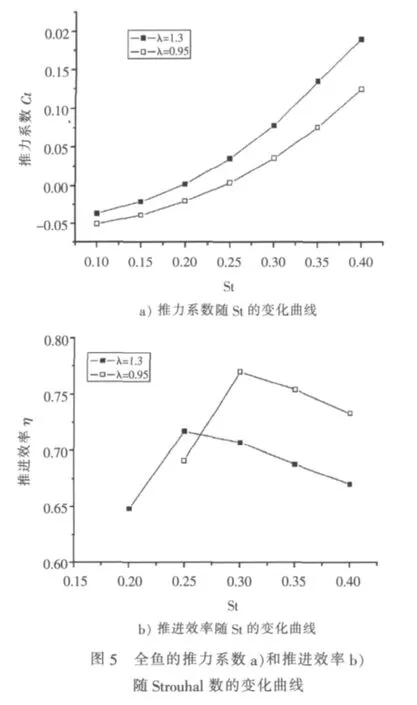
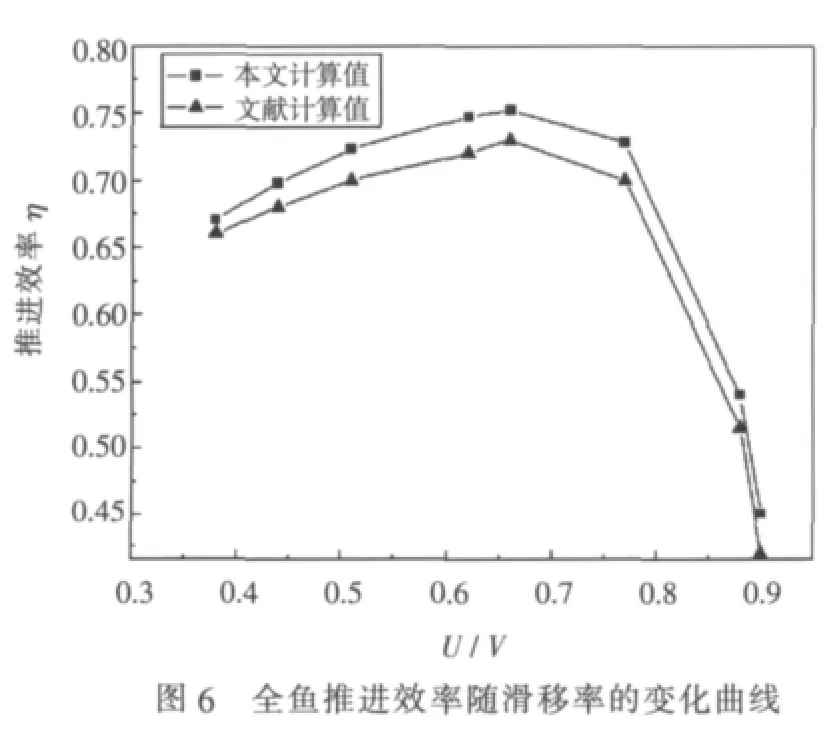
图6给出了本文中全鱼推进效率计算值与文献[17]中推进效率计算值随滑移率的变化对比曲线。可以看出,两条曲线的变化趋势是一致的,表明了本文数值计算模型及计算结果的合理性。
3.2 尾迹流场结构
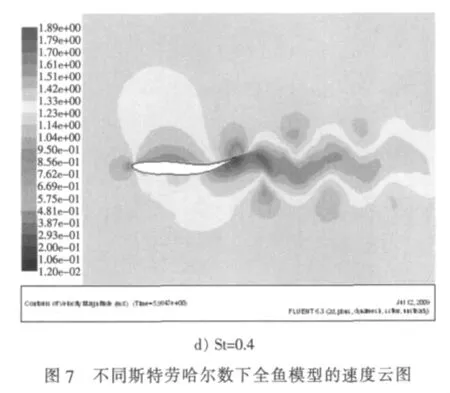
尾迹涡系的演化过程直接影响着鱼的水动力特性,通过研究全鱼模型的波状摆动式运动所引起的非定常流场对于探明鱼类的游动机理具有重要意义。图7给出不同斯特劳哈尔数下全鱼模型的速度云图,由图可以看出,当斯特劳哈尔数大于0.2时,尾流场产生反卡门涡阶,同时在尾流中间区域伴随着强度很大的射流,产生一个向前的推力。虽然射流的强度和宽度在增加,随之通过涡脱落在尾迹中消耗的能量也越多,但是随着斯特劳哈尔数的增加,还是会有更多的涡从尾缘脱落。因此通过对鱼体尾迹涡流场的分析,可以解释如图5中推力系数随着斯特劳哈尔数的增加而逐渐增加而推进效率却会在St=0.25达到峰值的现象。
4 结论

通过建立二维全鱼的物理模型以及波状摆动方程,对鱼类波状式摆动进行了数值模拟,分别探讨了斯劳哈尔数、波长、滑移率对全鱼推进性能的影响,给出了不同斯特劳哈尔数下全鱼的推力系数以及流场结构,分析了全鱼尾迹涡流场结构对水动力系数的影响。同时,本文也为研究三维全鱼模型的推进机理提供了思路。
[1] LIGHTHILL J.Mathematical Bio fluid dynamic[M].Cambridge:University of Cambridge SIAM.1975.
[2] 童秉纲,庄礼贤.描述鱼类波状游动的流体力学模型及应用[J].自然杂志,1998,20(1):1-7.
[3] 童秉纲,庄礼贤,程健宇.鱼类波状摆动推进的流体力学研究[J].力学与实践,1991,19(3):17-26.
[4] LIU H,KAWACHI K.A n umerical s tudy of u ndulatory s wimming [J].Journal of Computational Physics,1999,155(2):223-247.
[5] GILMANOV A,SOTIROPOULOS F.A h ybrid Cartesian/immersed boundary method for simulating flows with 3D,geometrically complex moving bodies[J].Journal of Computational Physics,2005,207(2):457-492.
[6] BORAZJANI I,SOTIROPOULOS F.Numerical investigation of the hydrodynamics of carangiform of swimming in the transitional and inertial flow regimes [J].Journal of Experimental Biology,2008,211:1541-1558.
[7] ZHU Q,WOLFGANG M J,YUE D K P,et al.Three-dimensional flow structures and vorticity control in fish-like swimming[J].J.Fluid Mech,2002,468:1-28.
[8] 周林慧.水下仿生推进系统水动力特性研究[D].镇江:江苏科技大学,2005.
[9] WANG Z D,ZHANG X Q,SU Y M,et al.Analysis of the caudal vortices evolvement around flapping foil[J].Journal of Bionics Engineering,2005,4:195-201.
[10]王志东,张晓庆,周林慧.三维摆动尾鳍的数值模拟[J].江苏科技大学学报,2006,20(1):6-10.
[11]WANG Z D,CHEN P,ZHANGX Q.Wake vortex structure characteristics of a flexible oscillating fin [J].Journal of Bionic engineering,2008,5(1):49-54.
[12]陈宏,竺长安,尹协振,等.基于Matlab的机器金枪鱼巡游的动力学仿真[J].系统仿真学报,2006,18(1):207-212.
[13]SAKAKIBARA J,NAKAGAWA M,YOSHIDA M.Stereo-PIV study of flow around a maneuvering fish [J].Experiments in Fluids,2004,36(2):282-293.
[14]JENNIFER C N,GEORGE V L.Hydrodynamics of caudal fin locomotion by chub mackerel, Scomber japonicus[J].The Journal of Experimental Biology,2002,205:1709 -1724.
[15]VIDELER J J,HESS F.Fast continuous swimming of two pelagic predators, saithe (Pollachius virens) and mackerel(Scomber scombrus): A kinematic analysis[J].The Journal Experimental Biology,1984,109:209-228.
[16]PEDLEY T J,HILL S J.Large-amplitude undulatory fish swimming:fluid mechanics coupled to internalmechanics[J].The Journal Experimental Biology,1999,202 (23):3431-3438.
[17]CHENG J Y,BLICKHAN R.Note on calculation of propeller efficiency using elongated body theory [J].The Journal Experimental Biology,1994,192(1):169-177.
A Numerical Simulation of the Propulsion Performance of Undulatory Fish Swimming
Cong Wen-chao Wang Zhi-dong Li Li-jun
School of Naval Architecture and Civil Engineering,Zhangjiagang Campus of Jiangsu University of Science and Technology,Zh angjiagang 215600, China
Aimin g at development of bionicmaneuverable propulsion system applied in the small underwater vehicle,a numerical simulation of hydrodynamic characters of undulatory fish swimming was completed by means of the CFD software Fluent.The numerical calculation model of undulatory fish swimming was established.The effect of deformation parameters on the propulsion performance and vortex flow field structure was studied.The results show that greater propulsion is acquired when the wave length is increasing.The effect of slip ratio and Strouhal number on the propulsion performance is discussed by comparing both flow field structure and propulsion performance of fish under different frequencies.
fish; wave length; Strouhal number; hydrodynamic performance; flow field structure
U664.3
A
1673-3185(2010)04-01-05
10.3969/j.issn.1673-3185.2010.04.001
2009-10-10
国家自然科学基金资助项目(50879031)
丛文超(1983- ),女,硕士研究生。 研究方向:船舶流体力学。E-mail:congwenchao_02jy@ yahhoo.com.cn
王志东(1967-),男,教授。研究方向:水下航行器仿生推进机理及船舶操纵性特性。E-mail:cywzd@sina.com
猜你喜欢
浙江大学学报(理学版)(2022年1期)2022-02-21
哈尔滨轴承(2021年1期)2021-07-21
农业工程学报(2021年4期)2021-05-09
小学生作文(低年级适用)(2021年3期)2021-03-25
农业工程学报(2020年6期)2020-05-19
小学科学(2020年11期)2020-03-04
恋爱婚姻家庭·养生版(2018年11期)2018-11-26
电影故事(2015年29期)2015-02-27
天津诗人(2014年4期)2014-11-14
西南学林(2012年1期)2012-11-12