三体船横摇模型试验及其特性分析
2010-06-07 02:52卢晓平
中国舰船研究 2010年4期
姚 迪 卢晓平 王 毅
1大连船舶重工有限责任公司军事代表室,辽宁 大连 116001 2海军工程大学 船舶与动力学院,湖北 武汉 430033
三体船横摇模型试验及其特性分析
姚 迪1卢晓平2王 毅2
1大连船舶重工有限责任公司军事代表室,辽宁 大连 116001 2海军工程大学 船舶与动力学院,湖北 武汉 430033
三体船在波浪中的横摇特性和优点是三体新船型研发的技术支撑,采用模型试验和理论分析相结合的方法,对三体船横摇运动特性进行探讨。开展三体船静水横摇、正横浪零速波浪横摇模型试验,得出三体船线性、非线性阻尼假设下的横摇阻尼、频率响应和周期。通过横摇响应曲线的分析和对比,得出三体船不同侧体位置下波浪中横摇附加惯量、阻尼和运动响应、周期特性,以及侧体位置对以上各横摇特性影响的规律。研究表明:三体船横摇阻尼远大于常规单体船,而横摇运动幅值响应远小于常规单体船;侧体的横位置对三体船横摇具有显著影响,侧体纵向位置对横摇影响很小。综合考虑运动响应和横摇周期,在不规则波中三体船的横摇比常规单体船缓和得多。
三体船;船舶耐波性;横摇运动;模型试验;横摇阻尼
1 引言
三体船作为一种新型船舶,具有兴波阻力小、适航性、稳性和总体布置性好等诸多优点,是目前国内外研发的热点船型之一[1]。2000年英国建造了98.7m长,1 100 t级的三体试验舰 “海神”号后,美国军方长期派员参与“海神”号实船试验,并为此船提供一套综合试验仪器对三体船耐波特性进行精确测试。2005年澳大利亚建造出了世界最大全铝质车—客—货运三体船,船长约127 m,500 t装载下航速可达40 k n,4 m有义波高下的试航速度达45 k n。2008年由澳大利亚奥斯图公司承建的美国三体濒海战斗舰“独立”号(LCS-2)建造完毕[2];2009 年 11 月中旬,“独立”号在墨西哥湾进行海试,海试中“独立”号全速航行时航速高达46 k n。尽管以上三体实船的建造可视为当今三体船发展中的重要标志,意味着三体船将进入商业和军事应用阶段,但其耐波性的研究,尤其是其横摇性能的研究还不充分。D avis等[3]根据时域计算结果,对三体船和双体船在波浪中的摇摆性能进行了比较,得出三体船在波浪中的纵向运动具有优势的结论;H ebblewhite等[4]根据切片法计算分析了侧体纵向位置和傅汝德数对三体船在波浪中纵向运动的影响,其研究的主要意义在于展示了将相对简单的计算方法推广用于求解三体船在波浪中的纵向运动问题的可能性;Wei等[6]将其提出的势流计算2.5维方法应用于计算、分析三体船在波浪中的纵向运动,该方法结合了切片法计算快捷和三维面元法计算更为准确两方面的优点;Fang等[7]采用三维脉动源方法求解了三体船在波浪中的阻力增量,得出了具有一定准确性的结果以及适当增大侧体横向间距、纵向偏距有益于减小波浪中的阻力增量,但正如文献[7]本身指出的,其所采用的三体船波浪中阻力增量计算方法所得结果还不够准确,需进一步研究得出三体船波浪中阻力增量更准确的预报方法。总之,伴随着三体船型的研发和应用,三体船的耐波性研究受到重视,开展了一定的研究,但三体船横摇特性研究还很薄弱,进一步研究掌握其在波浪中的横摇运动特性既重要而又迫切。在船体构型上,三体船两个侧体的引入使得船体周围流场变得十分复杂,采用纯理论方法确定横摇阻尼、附加惯量精度还不够高。本文以三体船模型试验为基础,采用线性与非线性方法确定横摇阻尼系数和横摇附加惯量,进而求解其横摇运动响应,分析三体船侧体位置对其横摇阻尼和运动响应等横摇运动特征的影响。
2 三体船模型横摇试验方案
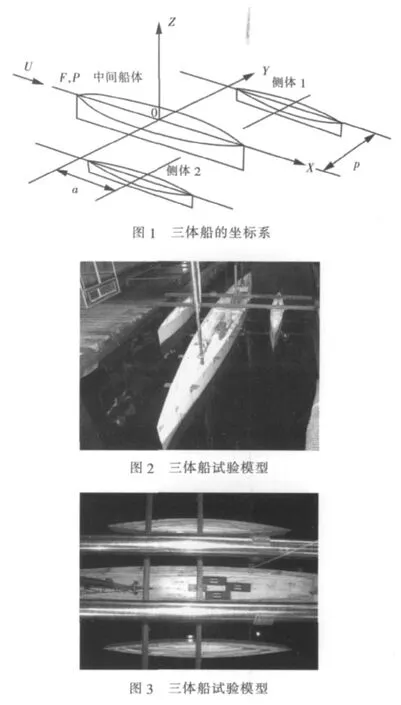
权衡片体布局的实用性和减阻优化计算结果,取定试验模型中体和侧体主尺度参数如表1所示。考虑到主要研究内容是三体船横摇特性和侧体位置对三体船横摇特性影响,为船型描述方便,试验模型的中体和侧体均采用Wigley数学船型,且两者几何相似。用钢架连接三个片体,通过调整固定在钢架上的位置来变动横向偏距和纵向偏距。同样考虑到工程实用范围以及侧体布局减阻优化初步结果[7],分别取 a= 0.5m,p= 0.6 m;a=0.5m,p=0.75m;a=1.5m,p=0.75m 3 种侧体布局参数,a,p意义如图1所示,分别在这3个布局状态下进行三体船模型波浪横摇与静水横摇试验,试验模型如图2、图3所示。
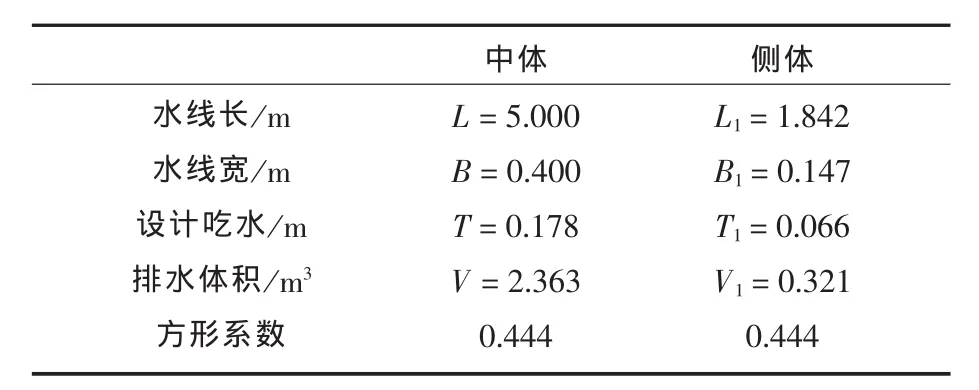
表1 三体船模型主尺度及其船型参数
3 三体船模型横摇试验及其分析
分别进行了3种不同布局下的静水横摇试验与零航速正横浪下的波浪横摇试验。
3.1 静水横摇试验衰减曲线及其周期、消灭曲线
由静水横摇模型试验得到如下测试结果。
在 a=0.5 m,p = 0.6 m;a=0.5 m,p = 0.75 m;a=1.5 m,p=0.75m 3 种侧体布局下,静水横摇衰减曲线如图4~图6所示。
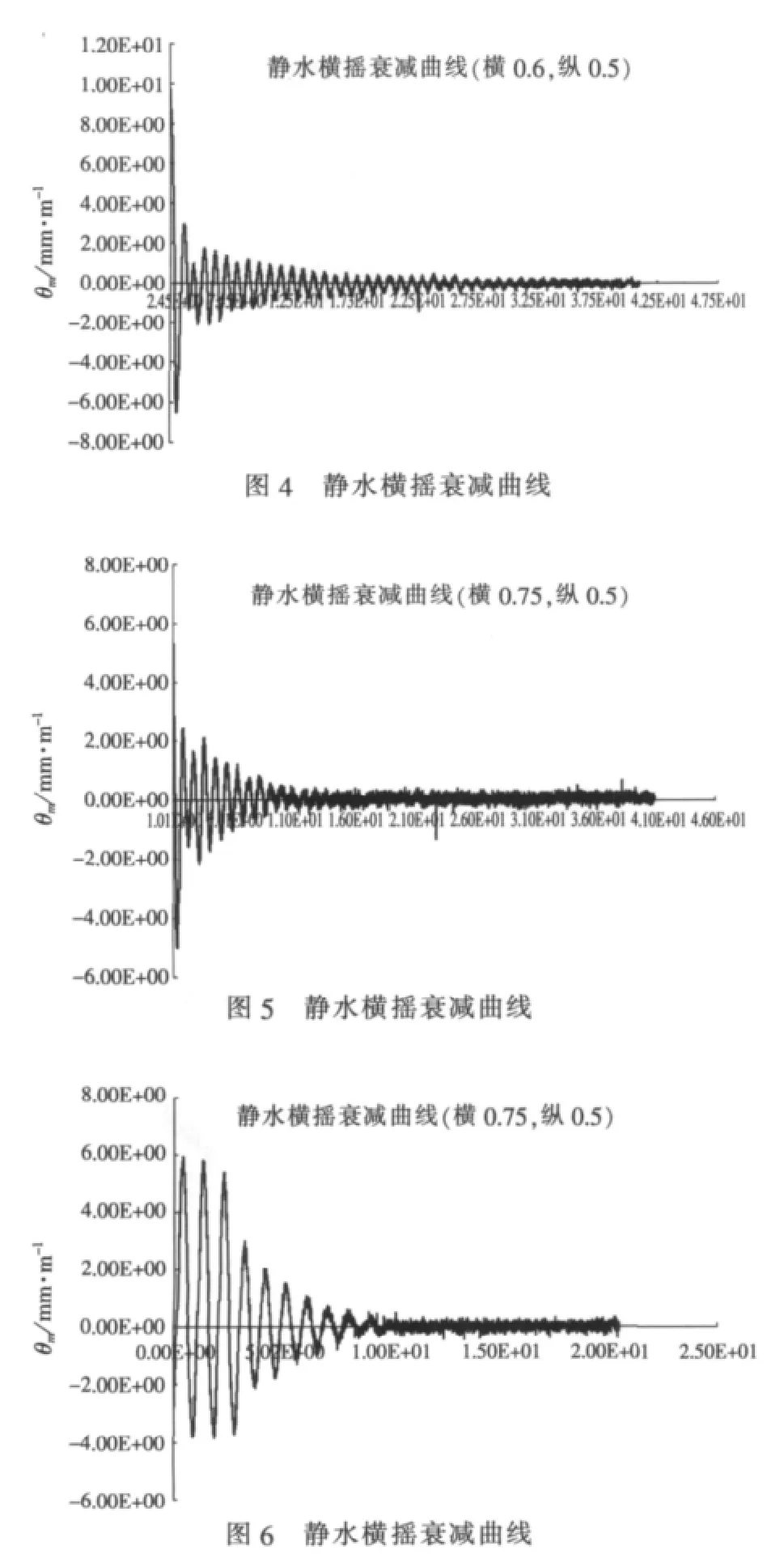
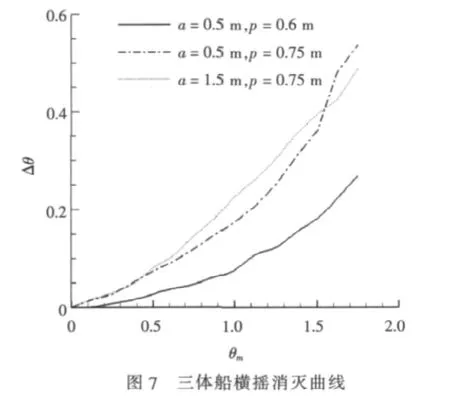
将试验得到静水横摇衰减曲线经“粗光顺”处理[8]后可以得到在3种侧体布局下静水横摇周期Tθ分别为 0.9 s、0.92 s,0.96 s。由试验所得数据可得出3种侧体布局下的静水横摇消灭曲线如图7所示。
3.2 线性阻尼特性及相应正横浪零速横摇响应特性分析
假定模型试验横摇运动满足线性阻尼规律,则线性阻尼规律下的三体船横摇运动方程为:

式中,2Nθ为横摇阻尼系数,阻尼力矩与横摇角速度成线性关系为:
式中,Δθ与 θm都可以从图 7消灭曲线求得,Jθ+ΔJθ表示横摇转动惯量,按下式确定。

将试验所得结果代入式(3),在 a=0.5 m,p =0.6m;a= 0.5m,p = 0.75 m;a= 1.5 m,p = 0.75m 3种侧体布局下分别得到横摇阻尼系数2Nθ为0.108,0.258,0.296。
无因次衰减系数2μθ与2Nθ的关系为:

代入 2Nθ得到 2μθ为 0.051,0.119,0.131。 在线性阻尼规律下,横摇衰减程度取决于 2μθ,2μθ越大衰减越快,在转动惯量与初稳性高等其他参数都相同的情况下,当侧体横向间距增大25%时,2μθ比原来侧体横向位置下增长1.3倍,此时横摇衰减迅速加快,当侧体纵向位置(距中心)后移(大幅变化)时,2μθ有所增加,但增值不大(约 10%),所以正横浪零速横摇响应特性主要取决于三体船侧体横向位置的变化。
为进一步分析侧体布局对波浪中的横摇频率响应的影响,将所求得2μθ、nθ代入频率响应函数:
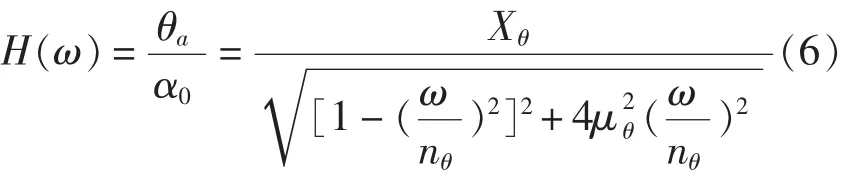
式中,Xθ为修正系数。按式(6)计算结果得出的三种侧体布局状态下频率响应函数曲线如图8所示。由图8可见随着侧体横向间距的增大 (约大25%),横摇响应幅值显著减小,其中调谐因子为1.0时,响应幅值减小约40%。侧体纵向位置(距中心)变化时对横摇频率响应函数曲线影响很小,由舯侧体布局变化为后侧体布局 (纵向位置大幅变化)时,仅在靠近峰值处共振横摇幅值响应有所减小,但幅值变化最大处约为9%,远没有侧体横向间距变化的影响大。尽管横摇响应曲线的变化与前文所得横摇阻尼系数的变化是相互印证的,但在三体船横摇特性分析中两种表达形式都是需要的,前者可以作为衡量三体船横摇特性的一种总体量,后者却适用于对三体船横摇特性进行更详细的分析,例如,从图8反映出,侧体布局对共振横摇区的横摇幅值较为显著,在共振区以外其影响则不大。
3.3 非线性阻尼特性及相应正横浪0速横摇响应特性分析
假定模型试验横摇运动阻尼为非线性规律时,三体船非线性横摇运动方程可以表示为

因式(7)为非线性微分方程,不能用一般的数学方法得出其解析解,这里采用等效线性化法求解。将阻力力矩函数模式与消灭曲线函数式模式对应起来,采用能量法(即功能原理或能量守恒定律)即可以由图7所示横摇消灭曲线求得等效阻尼系数。阻尼力矩函数模式为:

相应的横摇消灭函数模式为:

于是阻尼系数A、B与消灭系数α、β的关系为:

由图7所示消灭曲线利用最小二乘法可求得系数 α、β,代入式(10)得到在 a=0.5m,p=0.6m;a = 0.5 m,p = 0.75 m;a = 1.5 m,p = 0.75 m 3 种侧体布局时,阻尼系数A、B的值分别为:0.007 8,0.018 1;0.116 6,0.026 1;0.158 0,0.026 5。 再将求得的非线性阻尼系数 A、B 按式(8)、式(9)“平方加”函数模式进行线性等效化处理[9],将其转化为相应的线性阻尼系数,则线性化等效横摇阻尼系数为:

式中,横摇角θa0需要通过赋初值、迭代计算解非线性方程确定。与等效横摇阻尼系数相应的等效无因次衰减系数以及其中的线性分量2μθ、平方分量2μθ2可以分别表示为:
将式(13)、式(14)代入式(12)可得:

将式(16)中的 2μθ替换频率响应函数式(6)中2μθ代入该式,则可以得到在三种侧体布局状态下响应函数曲线,如图9所示。
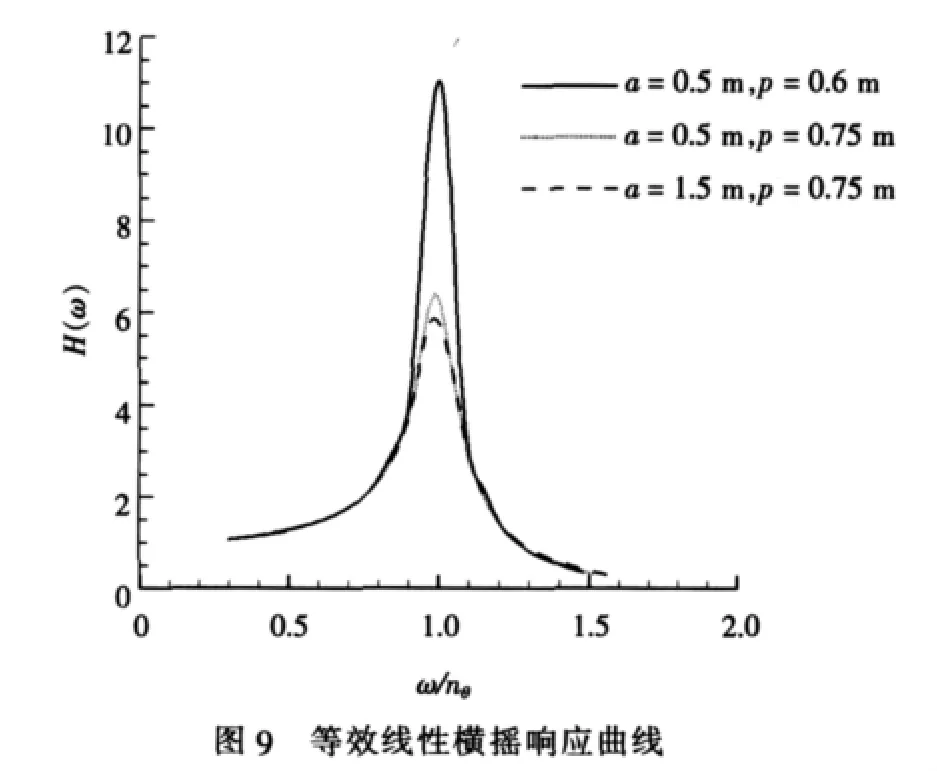
由图9可见等效线性阻尼与线性阻尼下横摇响应曲线基本一致。随着侧体横向间距的增大,横摇响应幅值显著减小,其中调谐因子为1时,响应幅值减小约40%。侧体纵向位置(距中心)靠后也使得横摇响应幅值有所减小,但幅值变化很小。
3.4 正横浪0速波浪横摇运动试验及其响应分析
由零航速波浪横摇试验可得出相应的零航速横摇频率响应函数,零航速波浪横摇频率响应函数定义为:
本文三体船在前文3种侧体布局状态下模型试验得到的零航速波浪横摇频率响应函数如图10所示。
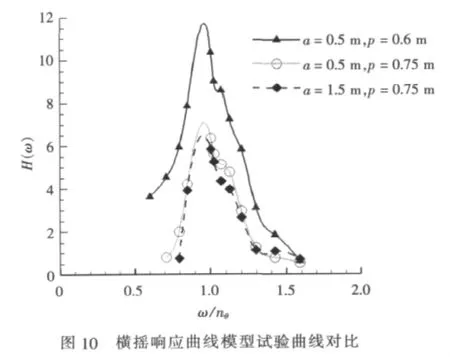
从图10三体船横摇响应曲线可以看出,侧体横向间距的增大,横摇响应幅值显著减小,其中调谐因子为1时,响应幅值减小约39%,侧体纵向位置(距中心)靠后也使得横摇响应幅值有所减小,但减小幅值甚微,这些均与计算结果一致,这从一个侧面印证了前文按线性阻尼、非线性等效线性阻尼分析所得结果和数值正确有效。
以下进一步对三体船静水横摇与零航速波浪横摇模型试验结果进行比较分析。通过静水横摇模型试验,将静水横摇阻尼作了线性与非线性假定并分别推算出了其零航速正横浪横摇响应曲线。将线性、非线性等效线性静水横摇阻尼所得横摇响应曲线与零航速波浪横摇试验直接得出的横摇响应曲线进行对比,如图11~图13所示,分别表示侧体布局 a=0.5 m,p =0.6 m;a=0.5 m,p =0.75m;a=1.5m,p=0.75m 时的零速正横浪横摇响应曲线。由图可见,三种曲线趋势总体一致,非线性等效线性与线性曲线基本吻合,波浪横摇与由静水阻尼计算横摇峰值基本相同。以上结果说明在三体船静水横摇中非线性项对按静水横摇试验阻尼求得的零航速波浪中横摇幅值响应影响较小,可利用简单线性阻尼近似非线性阻尼;另一方面表明在没有条件进行波浪横摇试验的情况下。三体船静水横摇试验数据可以近似推测出零速正横浪波浪横摇的大致状况三体船静水横摇试验数据可以反映三体船在零航速正横浪中横摇运动的基本要素,尤其是通过静水横摇试验可较准确地分析三体船共振横摇特性、近似地分析侧体位置对三体船在波浪中横摇影响。
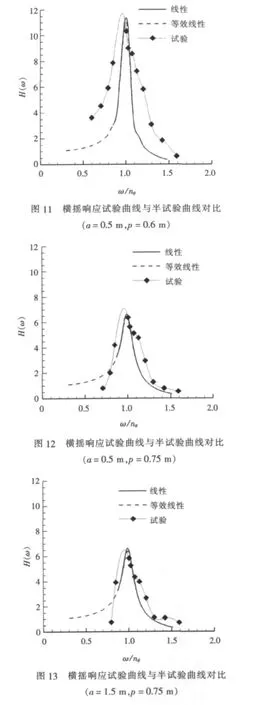
如前所述,在侧体位置对三体船在波浪中横摇的影响上,三体船静水横摇试验结果(文本也称“计算结果”或“半试验结果”)与零航速波浪中横摇试验结果总的定性规律是一致的:侧体横向位置对三体船横摇性能影响远大于其纵向位置对三体船横摇性能的影响;横向间距越大,侧体离中体越远,其所提供的恢复力矩越大,明显改善了三体船的横摇性能。但是在共振区以外,模型试验结果反映出侧体横向位置对三体船零航速波浪横摇特性也具有显著影响,这与计算结果(半试验结果)具有显著的区别;试验结果与半试验结果对比表明,当三体船侧体横向跨距较大时,在共振下的横摇阻尼与非共振区的横摇阻尼具有较大的差别,此时需通过零航速波浪中横摇模型试验才能更准确地得出非共振区波浪中横摇特性。
3.5 三体船横摇周期简析
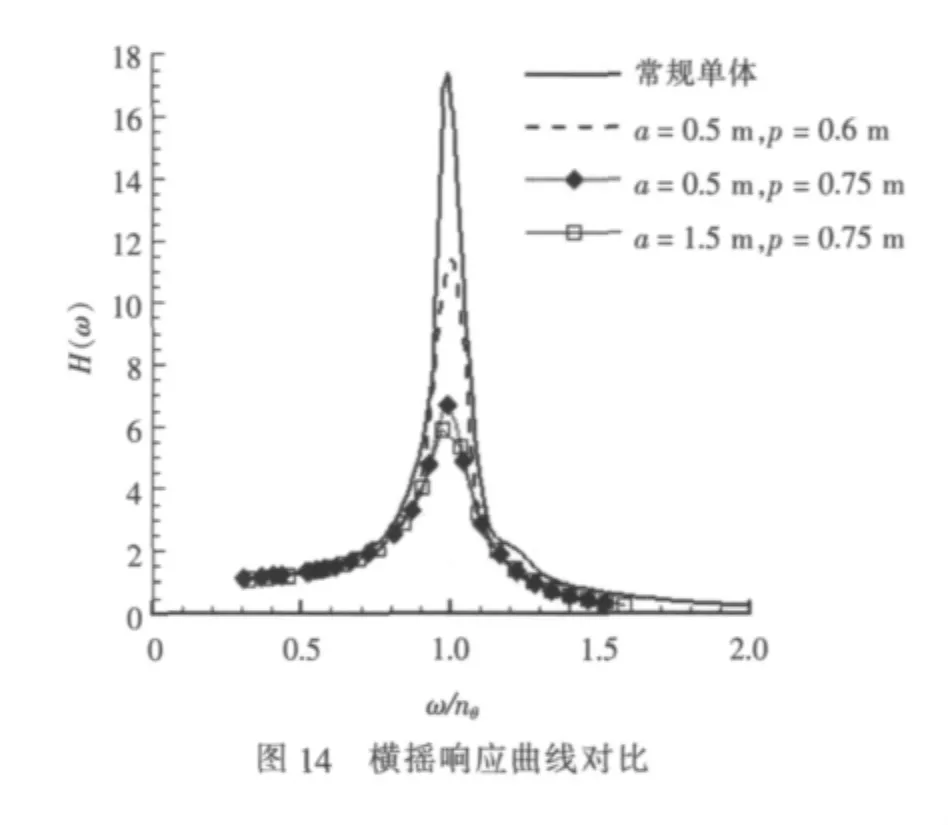
横摇周期也是船舶耐波性的重要参数。现根据模型试验结果,对三体船横摇周期特性简要分析。假设实船长为150m,即模型与实船缩尺比为1∶30,由相似理论得出,此时试验模型对应的实船固有周期分别为 4.94 s、5.05 s、5.27 s。 相对于常规船型,这组固有横摇周期数值是偏小的,但即便对于常规的单体船,这种固有横摇周期尚在可接受范围以内。对高速三体船,其规则波中的横摇幅值响应远小于常规单体船,某横摇固有周期等于8.98 s,无因次衰减系数 2μθ=0.042 的单体船和前文所述3种侧体布局三体船的横摇响应半试验曲线对比如图14所示,该图显示出横摇固有周期等于5.27 s的三体船共振横摇幅值响应仅约为横摇固有周期等于8.98 s的单体船共振横摇幅值响的1/3。船舶在不规则波中的横摇周期为其固有周期,且无明显共振现象出现。从物理概念上说,规则入射波的波倾kB可以表示为:

对不规则波则有


将式(16)代入式(15)可得

近似引用规则波波长与周期之间关系式λ=1.56T2,可得

4 结论
本文对三体船正横浪横摇特性进行了较为系统的模型试验研究和理论分析,综合所做研究工作可得以下结论:
1)三体船横摇运动幅值响应远小于常规单体船,其共振横摇运动幅值响应是常规单体船的1/3~2/3,视三体船侧体横向间距而定;三体船的横摇阻尼远大于常规单体船,其无因次阻尼系数可达常规单体船的 1.3~3.3倍,视三体船侧体横向间距而定。
2)三体船侧体的横向间距对其阻尼和横摇运动响应具有显著影响。侧体横向间距增大约25%,共振横摇运动响应幅值减小约40%;侧体纵向位置(距中心)变化时对横摇影响很小。
3)三体船的横摇周期较常规相当单体船小,然而若实船尺度和侧体横向间距选取恰当,横摇周期能控制在可接受范围以内;综合考虑运动响应和横摇周期,在不规则波中三体船的横摇比常规单体船缓和多了。
4)当三体船侧体横向间距较小时,静水横摇阻尼(共振横摇阻尼)与非共振横摇阻尼偏差不显著;随着三体船侧体横向间距增大,静水横摇阻尼(共振横摇阻尼)与非共振横摇阻尼偏差越显著。
[1] 卢晓平,郦云,董祖舜.高速三体船研究综述[J].海军工程大学学报,2005(02):43-52.
[2] 卢晓平,王中,孙永华,等.Rankine源Dawson型方法求解三体船兴波阻力 [J].华中科技大学学报,2008(11):103-107.
[3] DAVISM R,HOLLOWAY DS.A comparison of the motions of trimarans,catamarans and monohulls[J].Australian Journal of Mechanical Engineer,2007,4(2):183-195.
[4] HEBBLEWH ITE K, SAHOO P K,DOCTORS L J.A case study:theoretical and experimental analysis of motion characteristics of a trimaran hull form [J].Ships and Offshore Structures,2007,2(2):149-156.
[5] WEI Y F,DUAN W Y.Trimaran motions and hydrody-namic interaction of side hulls[C]//Proceedings of 9th int'l Conf on Fast Sea Transportation (FAST2007),Shanghai,23-27 Sep,China 2007.
[6] FANG M C,WU X C.The prediction of the added resistance for the trimaran ship with different side hull arrangements in waves[J].Journal of Ship Research,2009,53(4):227-235.
[7] 王中.三体船兴波阻力非线性计算及其阻力特性分析和减阻设计[D].武汉:海军工程大学,2010.
[8] CAIX G,WANG P,WIE X M.Prediction of longitudinal motion and wave load of the trimaran with small outriggers[C]//Proceedings of C hina International Boat Show & High Performance Marine Vehicles(HPMV)Conference,Shanghai,25-26March,China,2004.
[9] 卢晓平.舰船原理[M].北京:国防工业出版社,2007.
Model Rolling Experiments of Trimaran and Characteristics Analysis
Yao Di1 Lu Xiao-ping2 Wang Y i2
1Military Representative Office in Dalian Shipbuilding Industry Co.Ltd.,Dalian 116001,China 2 College of Naval Architecture and Power, Naval University of Engineering, Wuhan 430033, China
The un ique roll characteristics of trimaran in waves and its potential benefit to the performance are the technical basis for the on-going R&D in these areas.However investigation of the rollmotion characteristics of trimaran was carried out by theoretical analysis incorporating model tests (i.e.zero speed roll tests in the calm water and beam waves,the roll damping, frequency response) and response cycle were obtained under the assumptions of linear, nonlinear damping conditions.Furthermore, the trimaran roll damping,frequency response and the cycle characteristics of various outrigger positions and their impacts on such roll characteristics were validated.Present research shows that the roll damping is much larger than the conventionalmono hull, while the rollmotion amplitude response ismuch less,and the outrigger transverse position of the trimaran has dramatic effect on the rollmotion,but the outrigger longitudinal position has less effect.The study also indicates that the rollmotion characteristics of tramarn in irregular waves are significantly mitigated than that of the conventionalmono hull by taking into consideration ofmotion response and roll cycle.
trimaran; ship seakeeping; rollmotion; model test; roll damping
U661.31
A
1673-3185(2010)04-06-07
10.3969/j.issn.1673-3185.2010.04.002
2010-02-30
海洋工程国家重点实验室基金项目(0812)
姚 迪(1983-),男,硕士。研究方向:船舶流体力学。E-mail:01yaodi08@163.com
卢晓平(1957-),男,教授,博士生导师。研究方向:船舶流体力学。E-mail:luxiaoping100@163.com
猜你喜欢
房地产导刊(2022年4期)2022-04-19
都市人(2021年11期)2021-12-20
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
航空发动机(2020年3期)2020-07-24
水利规划与设计(2020年1期)2020-05-25
南京大学学报(数学半年刊)(2020年1期)2020-03-19
民用飞机设计与研究(2019年2期)2019-08-05
北方工业大学学报(2019年5期)2019-03-30
电子制作(2017年20期)2017-04-26