舰船综合电力系统智能保护装置设计
2010-07-25 08:14梁旭东祝捷胡亮灯
船电技术 2010年12期
梁旭东 祝捷 胡亮灯
(1. 浙江凯灵船厂监修室,舟山 316000; 2. 海军驻沈阳地区舰船配套军事代表室,沈阳 110168;3. 海军工程大学舰船综合电力技术国防科技重点实验室,武汉 430033 )
现代舰船采用综合电力系统是舰船动力平台的一次跨越式发展,代表了舰船动力系统的发展方向,未来舰船采用综合电力系统是世界各国海军的共识[1,2],其优越性体现为简化了整体动力系统结构,易于进行能量分配,从而有利于优化总体设计[3,4]。同时随着舰船电气化、自动化程度的日益提高,对舰船综合电力系统保护提出了更高要求,以满足综合电力系统供电连续、可靠要求。
舰船综合电力系统在保护方面存在以下几个问题[5]:
(1)综合电力系统各工况容量差别大,同故障类型在不同工况下故障电流有效值可能与正常工作电流有效值取值范围重叠。若按照较小工况计算整定值则容易让最大工况时断路器误动作,若按照较大工况计算整定值则容易让最小工况时断路器拒动;此外,时间电流原则对于故障类型的识别能力较弱,不同工况下发生不同故障时,用于判断故障类型的数据取值范围出现重叠,对故障的区分能力不好。
(2)综合电力系统配电线路比较短,无法利用短路电流沿线路下降的方式实现保护的选择性,只能依靠阶梯延时。由于系统容量大,结构复杂,负荷级数多,按时间原则整定时,靠近源侧的开关动作延时将大幅增加,这样将导致故障时母线电压跌落时间增长,增加了用电负荷因欠压保护而退出运行的几率。此外,延时增加将难以满足保护的快速性要求,不利于设备和系统的安全稳定运行。
上述难点使得传统的时间电流原则难于适应综合电力系统保护的需求,尤其对于全舰动力全部依靠电力的综合电力系统,这样的弊端将严重影响舰船的战斗性能及可靠性、生命力水平。针对这些问题,同时考虑到未来舰船综合开关保护装置智能化与信息化的需求,开展了基于BP神经网络的智能保护装置开发设计工作。
1 智能保护装置硬件设计
智能保护装置硬件主要由传感器信号取样电路、真有效值变换电路、信号调理电路、DSP芯片控制电路、数字量输出电路、隔离固态继电器控制电路等六部分构成,如图1虚框部分所示。
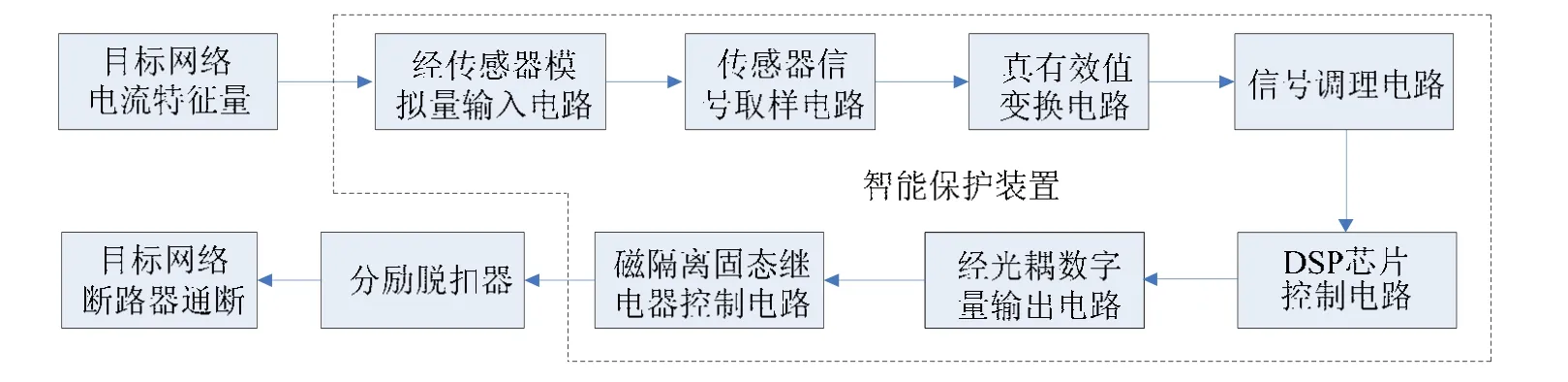
图1 智能保护装置示意图
1.1 传感器信号取样电路
电压电流传感器输出的都是电流信号,必须经过I/V变换才能进行采集,于是设置了图2所示电路,其中虚框所示部分为电流传感器输出等效电路。

图2 传感器信号取样电路
图中,IS、RS分别为传感器等效的电流、电阻,R1为传感器与I/V变换电路之间单芯导线电阻,RL为I/V变换器,R2为I/V变换电路与DSP模数转换模块之间单芯导线电阻,RT为DSP模数转换模块通道输入等效阻抗。
1.2 真有效值变换电路[6]
真有效值(RMS-DC)变换电路如图3所示,它可以直接测得输入信号的真实有效值,并和输入波形无关。本装置中选用的AD637真有效值变换器其可测量的信号有效值可高达 7 V,也是 AD公司RMS-DC产品中精度最高、带宽最宽的,此外,该芯片动态范围、波峰因数、稳定时间诸参数也都很好。
真有效值变换器工作原理如下:
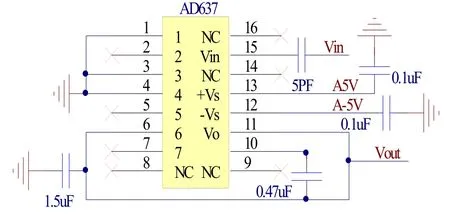
图3 真有效值变换电路

Vrms为信号的有效值,T为测量时间,V(t)为信号的波形瞬时值。V(t)是一个时间的函数,但不一定是周期性的。对等式的两边进行平方得:

右边的积分项可以用一个平均来近似:

这样式(2)可以简化为:

等式两边除以Vrms得:

式错误!未找到引用源。是测量任意波形信号真实有效值的基础,AD637真有效值直流变换器也正是基于该原理来得到信号有效值的。图 4为其等效的RMS-DC的电路。
1.3 信号调理电路
该调理电路包括输入滤波电路和输出限幅电路两部分,如图5所示。
滤波电路采用了二阶RC低通滤波环节,其相对于一阶电路滤波效果更好,输出电压在高频段下降更快;输出部分采用二极管D1、D2用来钳制电压以达到限幅目的,通过此电路使输出电压确保在DSP28335内置A/D转换芯片能转换电压0~3 V范围之内,以保护控制芯片,在输出端并上一个电容能使输出波形进一步平稳。
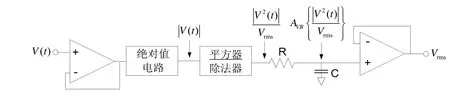
图3 RMS-DC变换的原理
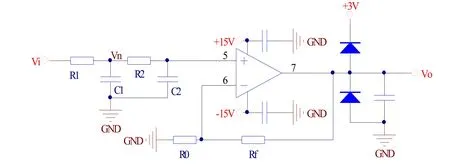
图4 信号调理电路
二阶RC低通滤波原理:
根据图5可以写出滤波器传递函数:
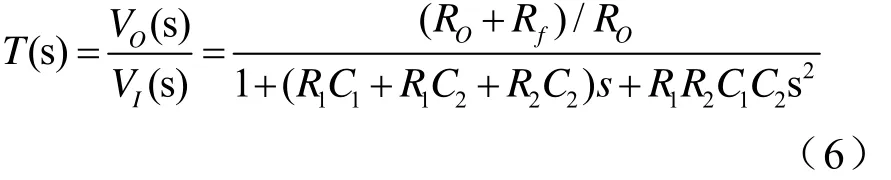
典型二阶低通滤波器传递函数标准形式[7]:
其中A是电压增益;wc是截止角频率;Q是品质因数。对比式(6)、(7)易得信号调理电路的截止频率fp,如式(8)所示。

一般设定低通滤波截止频率fp=3f0,其中f0为系统正常运行频率。此外,设计时需注意R1为kΩ级而R2为Ω级,电容C1比电容C2的值大至少一个数量级。
1.4 DSP芯片控制电路[8]
DSP控制芯片采用的是TI公司最高主频150 MHz,含有12位16个通道模数转化器(ADC)的TMS320F28335芯片。文中智能保护装置正是采用了该芯片内置 16个通道 ADC进行模数转换的。TMS320F28335是一款浮点DSP控制器,它与以往的定点 DSP相比,该器件A/D转换更精确快速,且浮点DSP芯片实现算法,编程比较简单,算法结果精度较高。智能保护程序包括多处指数运算和除法运算,由于该处理器增加了单精度浮点运算单元 FPU,相对于常用的控制芯片FMS320F2812(定点型),程序运算时间将大大减少。此外,该处理器采用内部1.9 V供电,外部3.3 V供电,因而功耗大大降低。同时为减少噪声反射,对输入DSP的16路模拟量先通过SDA32二极管阵列芯片进行高速并行线降噪。
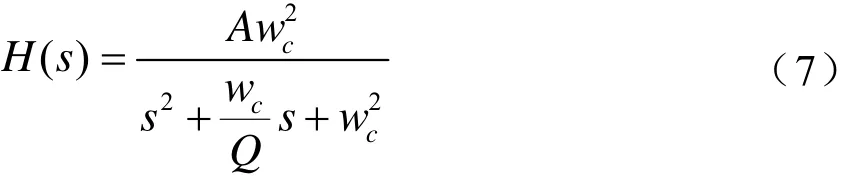
1.5 数字量输出隔离控制电路
数字量输出隔离控制电路包括6N137高速光耦隔离电路[9]和 JGX-1685FXC磁隔离固态继电器[10]控制分励脱扣器电路两部分,电路示意图如图6所示。6N137高速光耦芯片和JGX-1685FXC磁隔离固态继电器导通关断时间短,能满足系统保护实时要求。
6N137 高速光耦芯片的特点是:最大连续功率100 V/µs,光耦速度10 Mbd,低电流输入能力5 mA。
图5 数字量输出隔离控制电路
JGX-1685FXC磁隔离直流输出固体继电器特点:TTL逻辑电路兼容输入,直流输入;输入输出采用磁隔离技术;功率场效应管、IGBT输出,其主要参数如表1所示。注:负载如为感性负载,则须在负载端反并二极管。
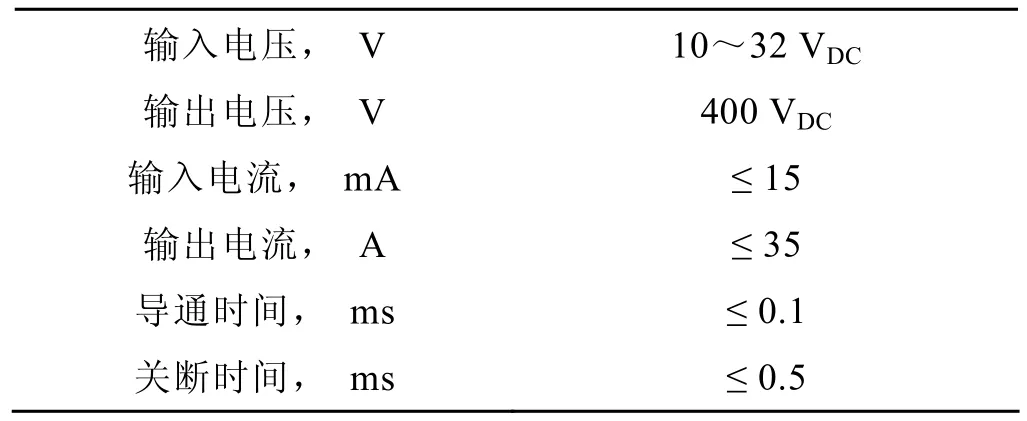
表1 固体继电器主要参数
2 智能保护装置软件设计
智能算法采用的BP(Back-Propagation Network)神经网络,它是一种单向传播的多层前向网络,由Werboss在他的博士毕业论文中提出[11],目前该算法已成为最为广泛的神经网络学习算法,它突出的优点就是具有很强的非线性映射能力和柔性的网络结构,使其在智能保护的应用中尤有着独特的优势[12]。
智能保护装置程序可分为以下几个过程:
1) 关中断,硬件初始化;
2) AD采样中断,对目标电力系统进行数据采集;
3) 数据采集后,进入 BP网络智能保护程序;
4) 对采集来的数据进行归一化;
5) 计算BP隐层、输出层参数;
6) 输出智能程序的决策、判断结果;
7) 程序结束。
智能保护装置程序流程如图7所示。
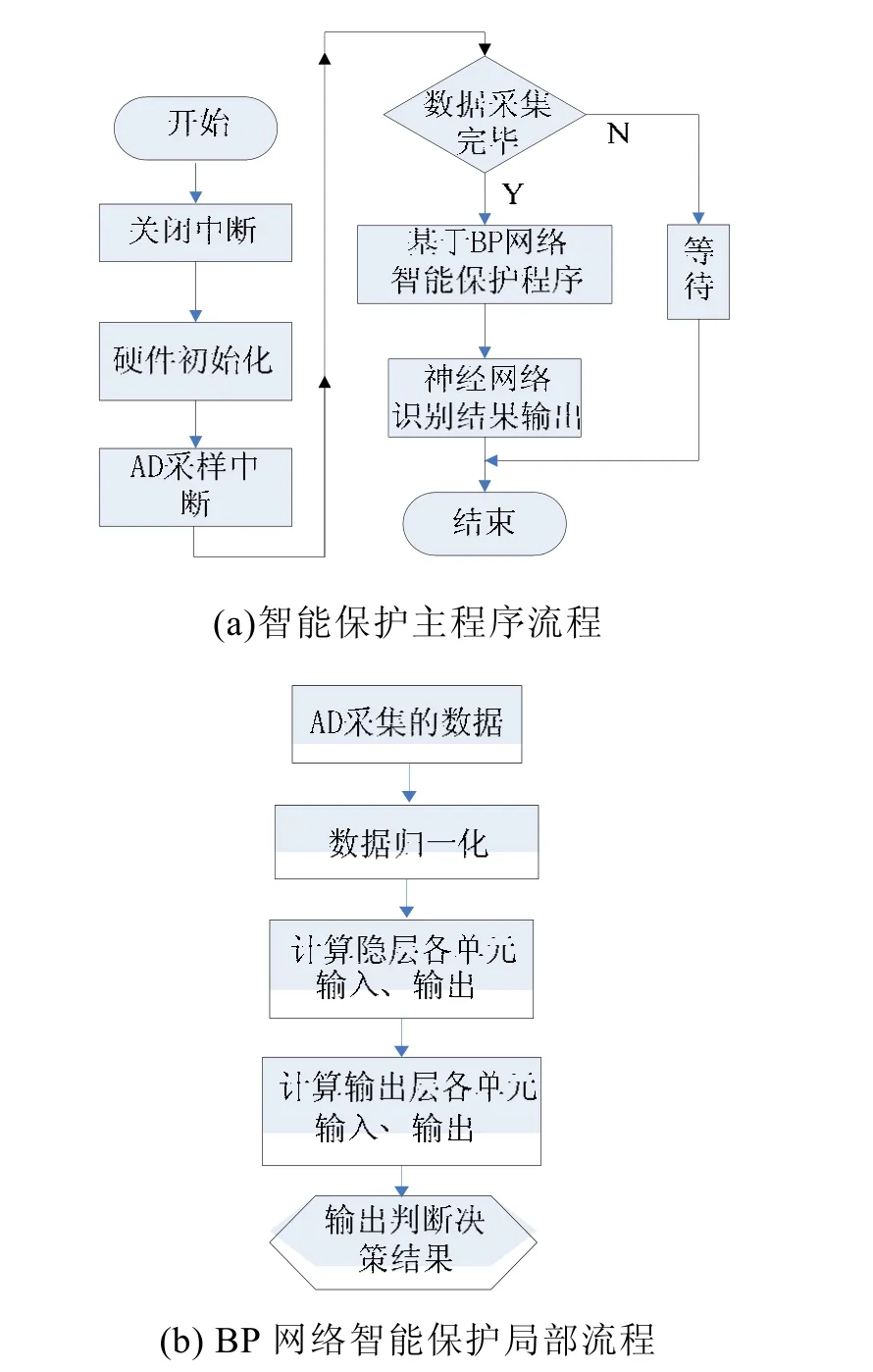
图7 智能保护装置程序流程图
3 智能保护装置性能测试
智能保护装置性能测试最理想的方式是进行物理试验,但条件有限且进行物理短路试验极具破坏力和危险性,一旦保护装置设计中有不周全的地方,将付出高昂的代价。考虑到安全和经济性,采取基于Hypersim实时仿真系统进行闭环试验,以验证智能保护装置有效可行。
3.1 Hypersim闭环测试系统[13~16]
Hypersim是加拿大魁北克TransEnergie科技公司开发的一种电力系统全数字仿真系统,主要用于电磁暂态仿真、仿真模型研究、闭环实时测试、控制系统仿真等。其中Hypersim闭环实时测试是通过A/D,D/A,D/I、D/O接口,可将外部硬件设备联接到 Hypersim模拟的电力系统环境中,形成闭环回路。Hypersim系统对装置进行实时闭环测试的原理如图8所示。
3.2 搭建的仿真模型
基于 Hypersim实时仿真系统中构建了舰船超大电力系统的局部网络仿真模型,如图 9。发电机G1、G2容量分别为7 MW和40 MW的电站。
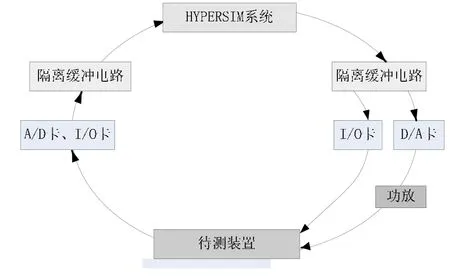
图6 Hypersim系统闭环测试原理图
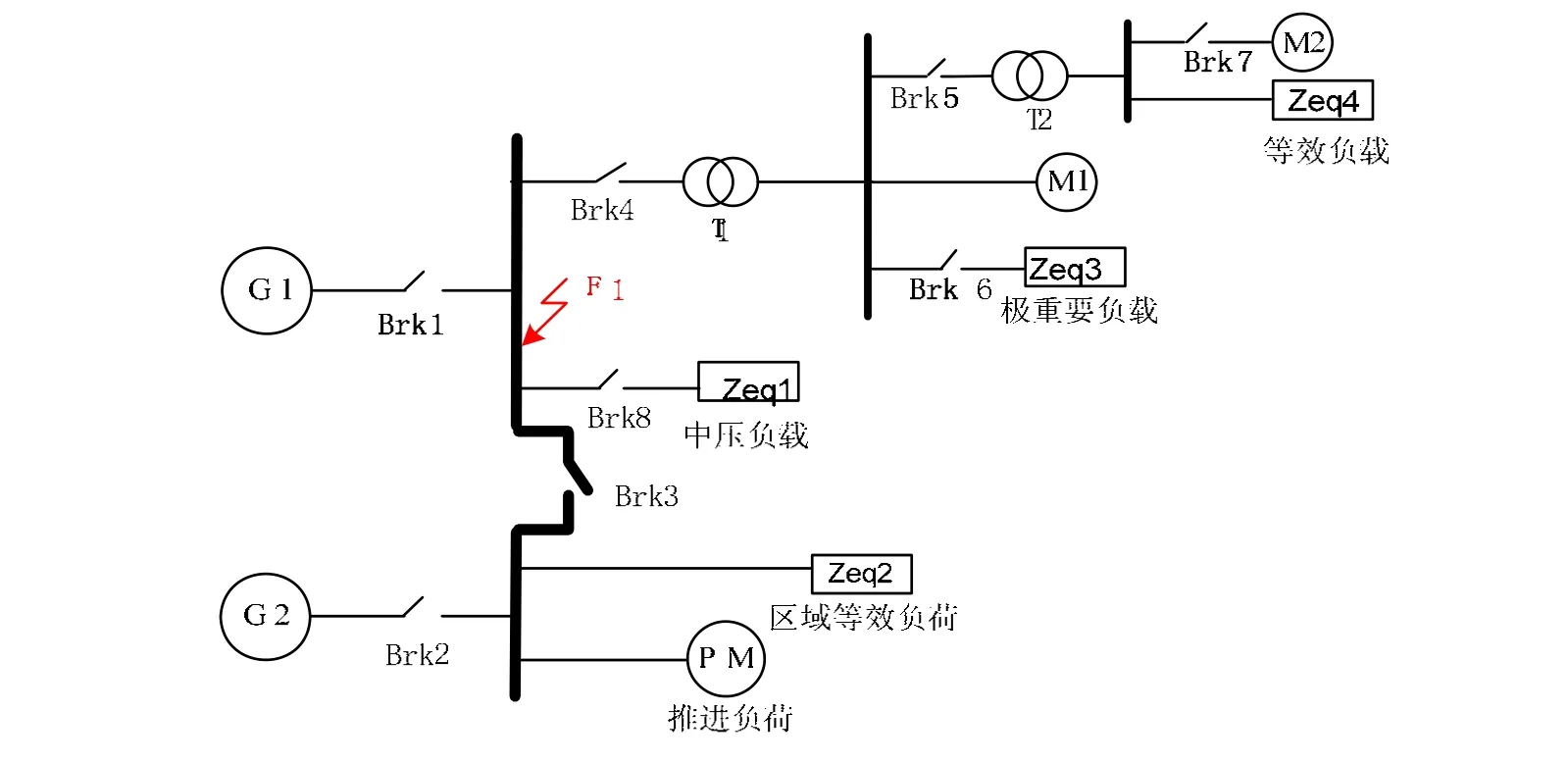
图9 仿真网络故障示意图
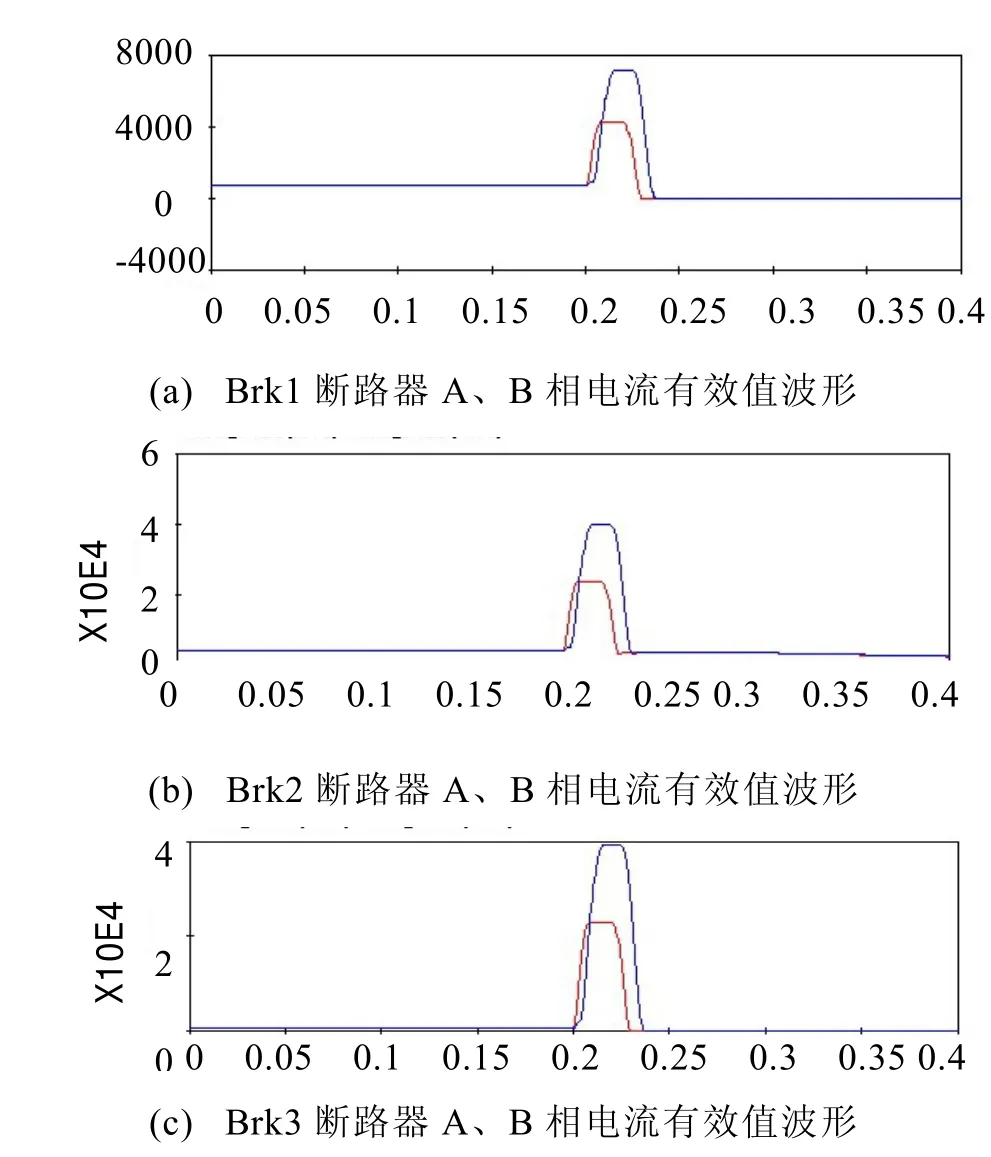
图7 断路器Brk1、Brk2、Brk3电流有效值波形
3.3 智能保护装置测试方法
具体测试方法如下:
(1)通过模拟量输出接口,将典型网络中相关的电流电压特征仿真信号输出给智能保护硬件装置;
(2)智能保护硬件装置依据特征信号进行故障判断、故障定位,形成断路器动作策略;
(3)动作策略通过开关量输入接口输入给Hypersim实时仿真平台,控制典型网络仿真系统中相关断路器的通断。
3.4 仿真结果及分析
对系统中 F1点母线短路故障进行若干次实时仿真实验,F1点短路时,发电机出口端断路器Brk1、Brk2和母联断路器 Brk3的 A、B相电流有效值波形如图10所示。
从图10中可看出,短路故障发生后,所设计的智能保护装置能够检测出故障的发生,发出开关跳闸信号,并将跳闸信号通过开关量输入接口同时对其它几种短路情况进行了仿真验证,进一步验证了智能保护装置设计的有效性。
4 结束语
本文基于 BP神经网络,设计了舰船综合电力系统智能保护装置,并结合Hypersim实时闭环测试平台对该装置进行了实验测试,结果表明设计的智能保护装置可以很好地实现系统故障的有效保护,满足舰船综合电力系统保护选择性、速动性要求。
[1] 马伟明. 舰船动力发展的方向-综合电力系统[J].海军工程大学学报,2002,14(6):1-5,9.
[2] Benatmane M,Maltby R. Integrated Electric Power and Propulsion System on Land-An Overview[C].IEEE ESTS’07,Arlington,American,2007:7-13.
[3] 郑定泰. 水面舰艇综合电力系统的技术进展[J]. 舰船科学技术,2005,27(5):5-12.
[4] 杨秀霞,张晓锋,张毅. 舰船电力系统的发展趋势[J].中国修船,2004,(3):12-14.
[5] 胡亮灯, 叶志浩, 方明, 邓铁辉. 综合电力系统不同容量机组并联时整定保护的考虑[J]. 中国高校电力系统及其自动化专业第二十五届学术年会,2009.10.
[6] http://www.datesheet5.com:AD637JQ.pdf.
[7] 牛燕炜. 有源低通滤波器的设计与仿真分析[J]. 现代电子技术,2007,12(251): 181-183.
[8] http://www.datesheet5.com:tms320f28335.pdf..
[9] http://www.datesheet5.com:6N137.pdf..
[10] http://www.datesheet5.com:JGX-1685FXC-010-400.p df..
[11] Werbos P J. Beyond Regression: New Tools for Prediction and Analysis in the Behavioral Sciences. Ph D Thesis,Harvard University,Cambridge,MA,1974.
[12] Mohamed E A,Rao N D. Artificial Natural Network Based Fault Diagnostic System for Electric Power Distribution Feeders[J]. Electric Power Systems Research,1995, 35(4):1-10.
[13] V. Q. Do, J.-C. Soumagne, G. Sybille, G. Turmel, P.Giroux, G. Cloutier,S. Poulin. Hypersim, an Integrated Real-Time Simulator for Power Networks and Control Systems. ICDS’99, Vasteras, Sweden, May 1999,pp 1-6.
[14] H. Su, K. W. Chan, L. A. Snider, J. C. Soumagne.Advancements on the Integration of Electromagnetic Transients Simulator and Transient Stability Simulator.IPST’05 in Montreal, Canada on June 19-23,2005,Paper No. IPST05 - 238.
[15] P. Sugree, U. Putchong, K. Voratas. Fast Simulation Model for Grid Scheduling Using Hypersim. in Proc.2003 Winter Simulation Conference, vol. 2, pp.1494-1500, Dec. 2003.
[16] A. 0. Barry, F. Guay, S. Guerette, P. Giroux. Digital Real-time Simulation for Distribution System. in Proc.2000 IEEE International Conference on Transmission and Distribution Construction, Operation and Live-Line Maintenance, pp. 252-258, Oct. 2000.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
中国特种设备安全(2019年10期)2020-01-04
中国特种设备安全(2019年8期)2019-10-14
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
现代工业经济和信息化(2016年19期)2016-05-17
舰船科学技术(2016年1期)2016-02-27
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28