基于FLUX软件的舰船磁场计算
2010-07-25 08:14姜智鹏庄飚关涛母海方
船电技术 2010年12期
姜智鹏 庄飚 关涛 母海方
(92537部队,北京 100161)
1 引言
舰载消磁系统是有效降低舰船磁场的重要措施之一,而要设计理想的消磁系统,必须首先对舰船磁场进行预测。目前常用的几种舰船磁场预测方法分别是母型舰换算、经验公式计算、磁性船模试验以及数值仿真计算。其中,母型舰法的使用条件比较苛刻,实际应用时一般需要进行大量的修正,在修正过程中需要和其它方法结合使用,如经验公式、物理模拟试验、仿真计算等;经验公式法主要依赖于计算人员的经验,受计算人员的人为干扰因素较大;磁性船模试验法是目前国内使用最广泛的方法,该方法主要是对船模制造提出了很高的要求,此外其建造周期长、通用性差、试验成本高。各种数值计算方法与计算机软件技术相结合产生了数值仿真计算法,其具有快速、简便、经济的优点。随着研究的不断深入,数值仿真计算法在舰船磁场计算的应用中越来越广泛,特别是各种商用电磁场计算软件的成熟,为舰船磁场的计算提供了基本的仿真平台。本文以电磁场有限元软件FLUX为基本的仿真平台进行舰船磁场计算研究。
2 舰船磁场计算的求解方程
舰船磁场是受地球磁场这个基本稳定的磁场磁化而产生的,舰船在地球磁场中的磁化可看作在弱磁场作用下铁磁物质的静态(准静态)磁化过程,而且其感应磁场部分可以看作地磁场作用下的可逆磁化;另外,舰船磁场所研究的区域主要是舰船的外部区域。所以,可以将舰船感应磁场的计算归属到开域静磁场问题的研究范畴。
麦克斯韦电磁方程是电磁场分析的基础,而静态磁场方程由麦克斯韦电磁方程简化而来,其基本方程为式(1)、(2)和(3)[1]。
磁介质的高斯定律(磁通守恒定律)

麦克斯韦-安培方程(安培环路定律)

磁特性方程

静态磁场问题根据研究对象可分为 2D模型和 3D模型,根据求解方程的状态变量又可以分为矢量模型和标量模型,对于 2D静磁问题一般使用矢量磁位,而 3D静磁问题则一般使用标量磁位,因为标量磁位在计算精度、所需内存和解的唯一性上比矢量磁位有优势,这对于 3D问题很关键。舰船磁场的计算属于 3D静磁问题,因此使用标量磁位,相比于矢量磁位只需要1/3的未知数,可大大减少计算时间及对计算机内存的需要。
在静态磁场问题的求解中引入标量磁位φ,则


有多种选择且每种选择各对应一种标量磁位,每种标量磁位又对应不同的磁场求解方程。
有限元法静磁场标量模型的通用求解方程如下:

如下三种类型分别对应不同的三种标量磁位公式:没有电流源、电流源不需要剖分、电流源需要剖分[1]。

要求解的方程为:

状态变量为全标量磁位φtot。

要求解的方程为:



要求解的方程为:


部分标量磁位的使用,一方面提高了舰船感应磁场的计算精度,另一方面使得无限域的模拟成为可能[2]。
3 舰船磁场计算
FLUX软件被国外海军广泛应用于舰船磁场的计算及消磁绕组的优化设计,其基于有限元法[2-5]。针对舰船复杂的形体、船体大尺度与船壳薄壁之间的不一致、开域磁场的计算,该软件都能较好的处理。
以某船为研究对象,使用FLUX软件进行了舰船磁场的计算研究,现将基于FLUX软件的舰船磁场计算的一般步骤和注意问题总结如下:
① 舰船实体几何模型建模。利用第三方软件如SolidWorks等对舰船进行三维实体建模,模型建好后保存为 FLUX软件可以识别的格式,如STEP格式。需要注意的是在舰船实体模型的建模过程中,对舰船的形体需要进行适当的简化,忽略一些细微的地方,如很多倒角、圆角以及一些较小的部件等,因为过小的部件和细节在磁场分析中会导致剖分单元的困难,造成节点和单元数过多,甚至于无法进行剖分。
② 舰船几何模型导入与纠错。在SolidWorks中绘制完成舰船实体几何模型后,就可以将生成的STEP文件导入FLUX软件。在模型导入过程中需要注意的问题是导入坐标系的选择,此外,还会碰到模型无法导入的问题。由于生成的STEP文件含有的舰船几何模型信息很多,受软件所支持内存量的限制,可能会造成导入操作无法成功。针对该问题,一劳永逸的办法是增加软件所能支持的内存量,但在现有条件不能满足的情况下,可考虑利用FLUX软件的能够支持几何模型多次导入的功能,将原全船几何模型分割成多个部分,分别保存为STEP格式文件。由于每个文件包含的几何信息可以大为减少,能够解决舰船实体几何模型无法导入的问题。模型导入后需要对导入模型进行几何检查,查看有无几何缺陷。如果有,需要对几何模型进行修正和简化。导入后的舰船实体几何模型由于形体复杂,几何缺陷会比较多,包括致命缺陷和非致命缺陷。虽然FLUX软件具有自动修复功能,但自动修复功能无法满足大多数几何缺陷的修复要求,为此需要手动修复。
③ 模型的网格剖分。舰船形体特殊,结构复杂,因此舰船三维实体模型网格剖分的基本考虑是尽量使用只有四面体单元的自动剖分器,这样没有六面体、棱柱等其他形式的单元混合,剖分会相对简单一些。FLUX软件是通过剖分单元尺寸和数量对网格剖分进行控制和调整的。其中,通过剖分点的设置对单元尺寸进行控制,即点调节;通过剖分线的设置对单元数量进行控制,即线调节。对于模型的绝大部分,使用点调节就可以,而对于一些细节的部分则建议进行线调节,这样更利于剖分的成功[6]。归纳起来,成功实现满足计算精度要求的剖分的基本原则是保证边界盒有2~3层剖分单元(内、外边界盒之间),关键区域的剖分单元尺寸与磁性船模磁场实测点之间的最小距离相接近,同时尽量保证剖分的面元为等边三角形。
④ 物理属性的设置。对于属于静磁问题的舰船磁场计算问题,其在FLUX中使用静态磁场模型、标量磁位求解方程。本文中研究对象磁性船模由三种不同磁特性的钢材制造,因此在其舰船磁场模型中有四种不同磁导率的材料(加上空气),磁化曲线为线性,以相对磁导率作为唯一磁特性参数对材料进行定义。在模型的材料设置中,分别使用了volume regions和surface regions,并关联到相关的体和面。材料属性设置完成后,进行外加磁场和线圈的设置。外加磁场为空间分布均匀的地磁场,为了计算结果分析的方便,地磁场分量是分开设置的,即一次求解过程,只设一个地磁场分量(垂直分量或水平分量)。
⑤ 求解及后处理。FLUX软件可进行参数化求解,在舰船磁场的求解中,可将各材料的相对磁导率设为变量,对每个变量赋多个值,如对三种材料的相对磁导率各赋三个值,则通过一次求解过程就可以得出 27种不同磁导率组合的计算结果。求解完成后,可直接在软件中对某一物理量的值进行三维显示,还可定义平面矩阵,将该平面矩阵上特定物理量的值输出到文本。
4 计算结果的验证和分析
对某地地磁环境下A(浅深度)、B(较深深度)两个不同深度的舰船磁场的Zix、Ziy、Ziz分量进行了仿真计算,并与磁性船模磁场的实测结果进行比较。以Ziz分量为例,其A、B两个深度的磁场比较图见图1和图2。
从图1、2中可以看出,计算曲线与测量曲线的趋势基本一致。经统计,所有点计算值和实测值的相对误差均小于20%,其中绝大部分点的误差在5%以内,小部分点的误差在5%~15%之间,只有个别点的误差超过15%,在15%~20%之间。产生误差的原因有很多,经过分析,认为主要原因有以下几种:
① 几何模型的简化所产生的误差。由于舰船形体复杂,在几何建模时,对其流线型的船体以及轴等附件进行了一定程度的简化,这势必引入计算误差。
② 舱室设置与实际分布情况不尽相同所产生的误差。由于对磁性船模舱室分布情况没有完全掌握,舱壁是根据对相关资料的解读和判断而设置的,不能避免与实际分布情况有出入。
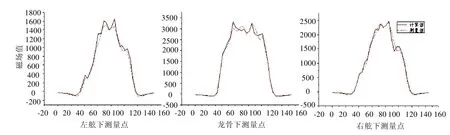
图 1 垂向感应磁场的垂向分量 Ziz(A深度)
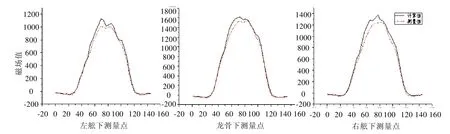
图 2 垂向感应磁场的垂向分量 Ziz(B深度)
③ 有限元法数值计算的固有计算误差。
④ 磁导率测试的误差。磁导率是根据原材料样品的磁特性测试确定的,受样品加工方式的影响较大,样品切割方式的不同会导致磁导率变化的不同。
⑤ 测磁系统固有的测量误差。
⑥ 测量点定位引起的测量误差。若某一测量点定位不够精确,则不可避免地引起一定的测量误差,将对应点的计算值与它相比较,就会出现不一致的情况。
上述原因引起的误差可通过采取措施进行控制。
5 结束语
本文以专用的电磁场有限元分析软件 FLUX为仿真计算的平台,对舰船磁场的有限元仿真计算问题进行了研究和探索。通过对舰船实体几何模型的建模、模型的有限元剖分等进行的深入研究,实现了舰船磁场的有限元计算。仿真计算结果经磁性船模实测磁场值验证,误差小于20%,可应用于工程实践。
[1] Phsical Applications: Magnetic, Electic, Thermal. [M].FLUX 9.30 User’s guide. 2005, 3:15-40.
[2] Brunotte X, Meunier G, Bongiraud J P. Ship Magnetizations Modelling by the Finite Element Method [J]. IEEE Trans. Mag, 1993, 29(2):1970-1975.
[3] Dr. Santana-Diaz E, Tims R. A Complete Underwater Electric and Magnetic Signature Scenario Using Computational Modeling [R].
[4] Pierre Dallet J. Ship Magnetic Modelization by Finite Element[J]. MARELEC, 2001, 35:5.
[5] Dr. Birsan M. User Experience: Defence Research for Development Canada[J]. FLUX MAGAZINE, 2006,50:11.
[6] General Tools Geometry and Mesh [M]. FLUX 9.30 User’s guide. 2005, 1:131-224.
猜你喜欢
微型电脑应用(2022年12期)2023-01-30
山东冶金(2022年2期)2022-08-08
防爆电机(2021年3期)2021-07-21
中国电子科学研究院学报(2019年8期)2019-12-23
计算机与现代化(2018年2期)2018-03-13
舰船科学技术(2016年1期)2016-02-27
新高考·高一物理(2015年7期)2015-09-21
中国舰船研究(2014年6期)2014-05-14
吉林大学学报(理学版)(2013年1期)2013-12-03
长江科学院院报(2012年6期)2012-08-09