GPS-RTK测量精度的影响因素研究与实验分析
2010-08-29 01:38王晓,高伟,张帅
全球定位系统 2010年4期
王 晓,高 伟,张 帅
(山东农业大学信息科学与工程学院,山东泰安271018)
0 引 言
RTK(Real Time Kinematic)技术是在 GPS技术基础上发展而来的载波相位差分测量技术,它在测量过程中可以实时提供厘米级精度的三维坐标。在测量过程中不受通视条件限制,速度快,精度高,各测量结果之间误差不累积。这些优点使RTK技术迅速应用于地形图测绘、公路测量、铁路测量、水上测量、国土资源调查等诸多领域。
RTK作业也有自身的局限性,例如为了能够快速、准确地解算载波相位模糊度,流动站与基准站之间的距离不能超过10~20 km,这是由电离层和对流层折射、轨道误差等与距离相关的误差造成的[1-2],这些误差可以用流动站周围的多个基准站信息进行改正或估算[3]。测量过程中要求基准站与流动站共同观测五颗以上GPS卫星,容易受到测站周围地形、地物的影响,另外地物反射造成的多路径效应也是影响RTK测量精度的一个重要因素。RTK基站的差分数据是通过无线电台发射的数据链传送的,因此,对无线电造成干扰的各种因素都会对RTK作业造成影响。研究人员对于以上影响因素的研究已经进行得很深入,也提出了一些有效的解决办法。但对测量作业方式对精度影响的讨论却很少。
1 GPS-RTK测量的基本原理
在RTK作业模式下,基准站通过无线电数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅接收来自基准站的载波相位信息,还接收来自GPS卫星的载波相位信息,由机内处理软件进行实时差分处理,求解测站点与基准站间的基线向量[4],并组成相位差分观测值进行实时定位,如图1所示。

图1 RTK测量示意图
RTK根据GPS相对定位的概念将一台接收机放在已知点上(称为基地站),另一台或几台接收机放在未知点上(称为移动站),同步采集相同卫星的信号,基准站测量同静态GPS是相同的原理,GPS系统是采用空间测距的原理来进行定位的。即通过空间三球交于一点(3R定位法)来确定未知点在空间的位置。
2 GPS-RTK测量精度的影响因素
影响GPS-RT K测量精度的因素按误差源不同,可以分为两大类:一是与外业测量有关的测量误差,二是与数据处理有关的误差[5]。
与外业测量有关的误差可以分为如下:
1)GPS-RTK接收机误差源(表1)。
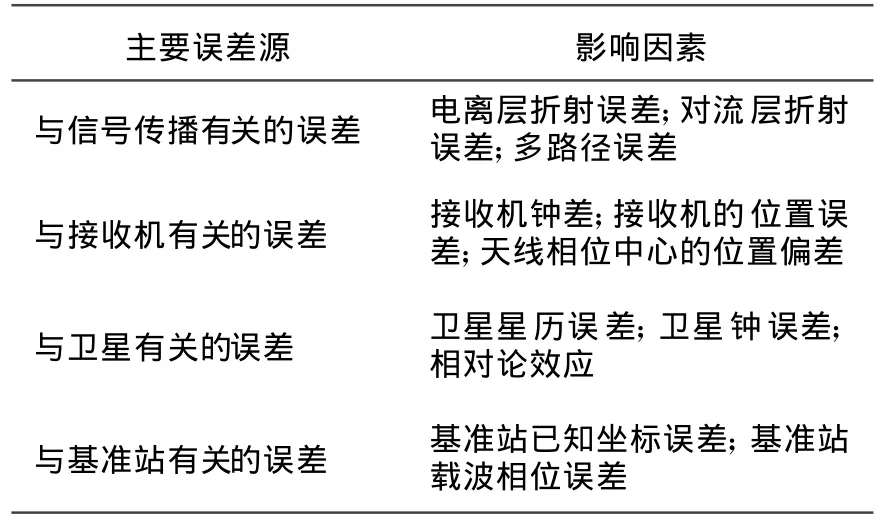
表 1 GPS-RTK接收机误差源
2)GPS-RTK流动站误差源。
①基准站点位的精度 ;
②天线对中等人为产生的误差;
③外界环境干扰;
④流动站天线姿态影响。
与数据处理有关的误差有以下几类:
①坐标参数转换误差;
②数据计算的数学模型误差;
③拟合内插误差;
④模糊度解算误差;
⑤动态基线解算误差;
⑥差分信号调制解调误差;
⑦流动站内存软件模型误差。
3 实验与精度分析
针对作业模式不同,对RTK测量精度进行分析,通过对比分析数据的精度、可靠性,分析如何提高RTK精度。
3.1 数据收集
实测线路长约13.3 km,采用南方RTK灵锐S86(RTK平面精度±1 cm+1 ppm,高程精度±2 cm+1 ppm)采集数据,点位路线如图2所示。
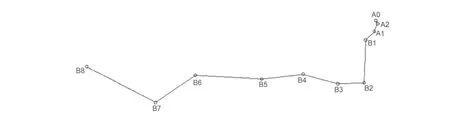
图2 测量点位示意图
收集数据包括已知GPS点坐标(已知点平面坐标采用静态E级GPS测量获取,高程采用四等水准测量获取)。
3.2 基准站-流动站校正精度分析
一般在标定RTK仪器测量精度时使用“固定误差+边长比例误差”的形式表示,即[6-7]
式中:a为固定误差;b为边长比例误差;D为流动站与基准站之间的距离。
基准站—流动站校正模式为:在已知点上架设基准站,输入已知坐标。在另外一个已知点上架设流动站,输入坐标进行流动站校正。在此测量形式下,基准站仅产生对中误差,在另一已知点进行校正时既有对中误差又有RTK随距离而产生的误差。设仪器在基准站的对中误差为m基,流动站对中误差为m流,流动站与基准站相对距离为d1,测量点与基准站距离为d2。若设流动站在已知点校正时的定位精度为m校,在测量点时的定位精度为m测,则m校=a+b×D,即在已知点上只测量一个WGS-84下的坐标用于校正,该点会引入a+b×D mm大小的误差。RTK定向误差为m定为

依据南方RTK灵锐S86仪器标称精度(RTK平面精度±1 cm+1 ppm),并设对中误差m中=3 mm,可估计出两已知点相距1 km时,其定向误差为:m定 =2.4″(见表2)。

表2 基准站-流动站校正模式定向误差与距离之间的关系
RTK基准站—流动站校正时引入的方位角误差会随距离的增加而减小,校正点相距越远,方位角精度越高。
将测量数据同已知数据对比分析 RTK测量精度(见表3)。
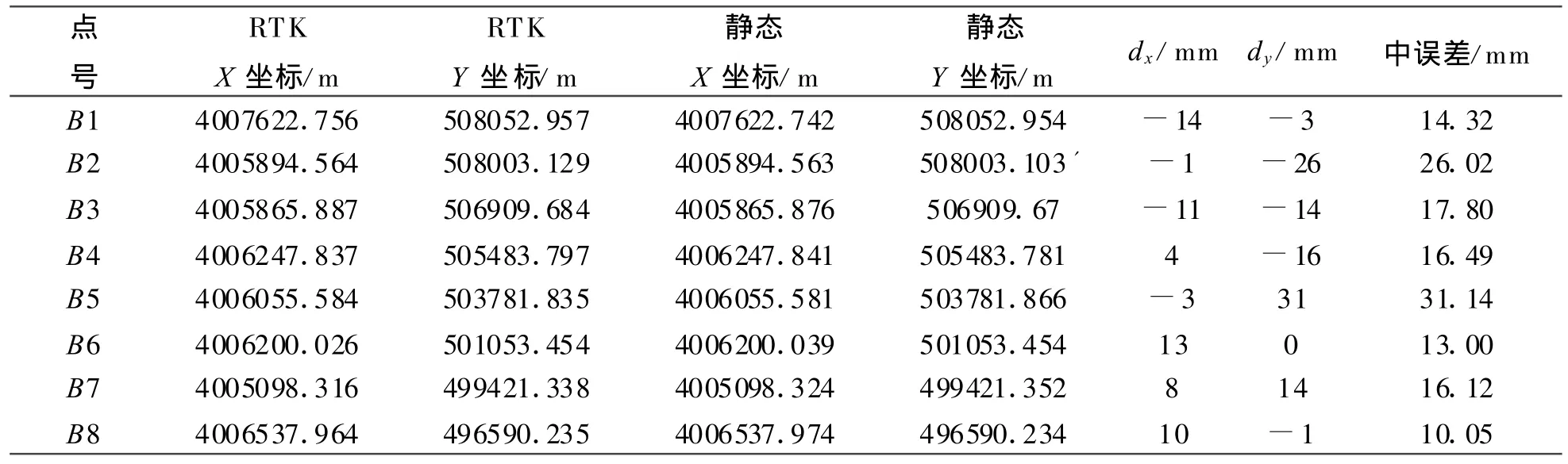
表3 基准站架设在已知点单点校正X,Y坐标精度分析
通过表格数据可得dx最大为14 mm,dy最大为31 mm,中误差最大为26.02 mm,平均中误差为18.12 mm。
3.3 流动站-流动站校正精度分析
流动站-流动站校正模式为:在未知点处架设RTK基准站,利用流动站在两个已知点进行点位校正。这种方式校正的精度与基准站到已知点的距离有关,即

假设两校正点到基准站的距离分别为D1,D2。则引入的定向误差为[6-7]:

式中:m定1=a+b×D1;m定2=a+b×D2。若D1与D2到基准站的距离相当即D1=D2=D,则计算两点校正后引入的定向误差为

假设D1=D2,算得定向误差(见表4)。

表4 流动站-流动站校正模式定向误差与距离之间的关系
RTK流动站-流动站校正时引入的方位角误差随距离的增加而减小,校正点相距越远,方位角精度越高。同基准站设在已知点的规律相同,不过通过对比可以发现用两流动站校正时的定向误差要大。

表5 基准站架设在未知点用两点校正X,Y坐标精度分析
将测量数据同已知坐标对比(见表5),dx最大为53 mm,dy最大为165 mm,点位中误差最大为173.3 mm,平均中误差为70.43 mm.比基准站设在已知点上中误差大了很多。
通过数据分析可得各点位中误差分布图,如图3所示。
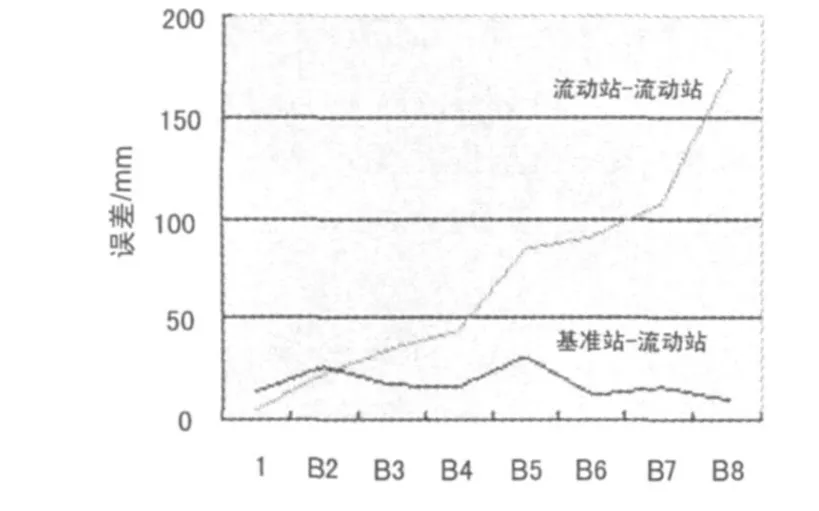
图3 两种方法中误差分布图
B7和B8点的误差比较大,原因之一是离基准站距离比较远,信号传输有干扰。二是中午观测的可见卫星少。如果去除卫星误差,将基准站设在未知点测得点位中误差明显大于将基准站设在已知点。但是因为将基准站设在未知点上,可以根据测区的范围结合已知点的位置选取最佳点,因此在实际测量中在精度要求不是很严格的情况下,可以采用流动站-流动站校正方法,提高作业效率。
通过实验对RTK测量三维坐标与高级别的测量结果进行对比,可得以下结论:
1)RT K测量,测点无需和基准站通视,具有高效率、直观快捷、实时性强、点位误差不累积、操作简单的特点等。
2)在距离基准站3 km范围内进行测量,测量点位精度较高,误差小,但是在距离基准站较远的点误差大,且随距离增加误差逐渐增大。
3)利用短边(100 m以内)校正时,测量点位的误差随距离的增加而增大,呈线性变化。同时,由于校正方式的不同也会造成精度上的差异,数据证明在已知点距离基准站同样远时,“基准站—流动站”校正方式测量的点位误差比“流动站—流动站”校正方式得到的点位误差小,精度高。
4 结 论
通过对RTK作业模式中两种点位校正方式对测量精度影响的对比分析,两种校正方法引入方位角误差变化规律相同,但流动站-流动站校正法引入的方位角误差整体大于基准站-流动站校正法,且用基准站-流动站校正法测得点位精度高于流动站-流动站校正法。基于流动站-流动站校正作业模式简便快捷,在实际工作中,应结合项目具体要求,选择合适的作业方式,会有效提高RTK作业效率、测量精度。随着RTK测量精度的提高其应用领域还将进一步扩大,我们可以期待未来在大区域的地面沉降测量、建筑物变形监测、精密设备的安装等诸多方面都将采用RTK技术。RTK的应用与研究必将进入一个崭新的阶段。
[1]WANNINGER L.Introduction to Network RTK[OL].2004-06-11,(2008-06-16),http://www.Network-rtk.Info/intro/introduction.html.
[2]高星伟.GPS/GLONASS网络RTK的算法研究与程序实现[D].武汉:武汉大学学位论文,2002.
[3]高星伟,陈锐志,赵春梅.网络RTK算法研究与实验[J].武汉大学学报.信息科学版,2009,34(11):1350-1352.
[4]隋海燕.GPS-RTK的测量原理与应用[J].北方交通,2009,31(4):16-17.
[5]李沛鸿,柳广春.GPS-RTK误差分析与探讨[J].全球定位系统,2008,32(2):51-52.
[6]张凤录,陈品祥.GPS RTK在城市导线测量中的应用研究[J].测绘通报,2005,50(7):13-16.
[7]丁文利,王怀念,黄 良.动态GPS(RTK)测量的精度分析[J].地矿测绘,2004,20(2):16-17.
猜你喜欢
航天制造技术(2020年4期)2020-09-11
化工设计(2020年6期)2020-01-13
劳动保护(2018年8期)2018-09-12
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
读者·校园版(2015年7期)2015-05-14
中国高新技术企业(2015年15期)2015-05-04