
兆瓦级风电变浆距自动控制系统故障诊断
2010-11-01 07:10许继电气风电控制技术研发中心张举良陶学军
河南科技 2010年5期
许继电气风电控制技术研发中心 张举良 陶学军
许继集团有限公司 马仪成
兆瓦级风电变浆距自动控制系统故障诊断
许继电气风电控制技术研发中心 张举良 陶学军
许继集团有限公司 马仪成
当前,由于环保和节能减排的需要以及风电技术本身的发展和完善,风电在我国的应用越来越广泛,应用前景也越来越广阔。众所周知的是对风机及其控制系统的维修和检修成本高且困难多。对风机故障的快速查找和准确定位不但有益于维修,还能提高风机系统运营效益。随着风电控制技术的不断发展,参考其他领域的故障定位方法,结合风电控制系统的自身特点,本文提出一种可以快速、方便、准确地定位风机系统故障的信息流故障诊断方法。
一、变桨距系统简介
变桨距系统应用于兆瓦及以上风机电动调桨和启动刹车。系统接收风力发电机组控制系统指令,实时调节桨距角,降低机组所承受的载荷水平,达到机组的最优运行和安全运行。依据主控要求自动启动、自动调桨、自动顺桨等。如通过风力发电机组控制系统下发速度、加速度及变桨角指令进行变桨距控制。变桨距系统应自动在整个变桨范围内工作正常,并同步桨叶,控制风机满足要求。常见的7柜电动控制方案包括中央控制柜、电机、驱动柜、电池柜、安全链系统和通讯接口(通过滑环连接到主控)等组成,系统结构如图1所示。
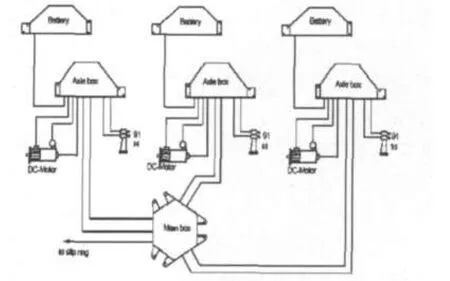
图1 变桨距系统结构
二、故障信息分类
变桨距系统常见故障信息可分为2类:预告报警类和触发安全链类。预告报警类包括一般设备变位、状态异常信息等。如驱动柜230V供电异常、温度断线。触发安全链类包括:驱动器故障、通讯异常等。如心跳异常、安全链24V失电。预告报警一般不影响系统的主要功能,出现此类故障时变桨距系统本身不作处理,只把故障信息主动送往主控系统,由主控系统判断是否采取措施、何时采取措施及采取何种措施,在采取措施前允许系统正常运行。触发安全链类信息若不处理将会造成巨大的损失和严重后果,出现此类故障时变浆距系统本身应该根据具体故障采取预定的处理方案,自动下发处理指令,控制系统采取预定紧急措施,并把故障信息优先主动上传至主控系统。如出现异常时变桨系统将不会接收主控的调桨指令甚至接收错误的指令,使风机的桨叶不可控,在风速大时会出现过载,甚至风机倒塌的情况,此时变桨距系统应立即由后备电池驱动调桨电机紧急停机并上传故障信息。
三、故障诊断分析方法
风机使用寿命长达20年,在运行过程中难免出现各种故障,在出现故障时我们如何快速、准确的定位故障,分析故障的真正起因,为采取正确的处理措施提供有力的决策依据是摆在我们面前的重大课题。
一般的故障诊断系统包含2个方面:信息采集和故障模型。根据实时采集的信息和历史运行信息,参照故障模型,就可以自动、快速、准确地进行故障定位,继而采取正确的后继处理措施,所以建立变浆距系统的故障诊断系统,首要任务就是分析需要采集哪些实时信息、存储哪些历史信息,建立各种典型常见故障的故障模型。出现故障时我们首先看故障信息和现象,然后建立和查找信息流图,找到相应的故障回路,确定可能的故障点。此方法类似画电路图一样画出相关故障信息流突,下边举例来说明。
1.限位开关误触发。桨叶位置不在限位位置限位开关触发,则为限位开关误触发。每个桨叶在顺桨位置设置了2个限位开关,即91°和96°限位开关,其相关信息绘图如图2所示,由后备电池作为电源,通过电源总开关4Q1及微断引入到限位开关中,并由限位开关继电器采集限位开关状态反馈到控制器中。
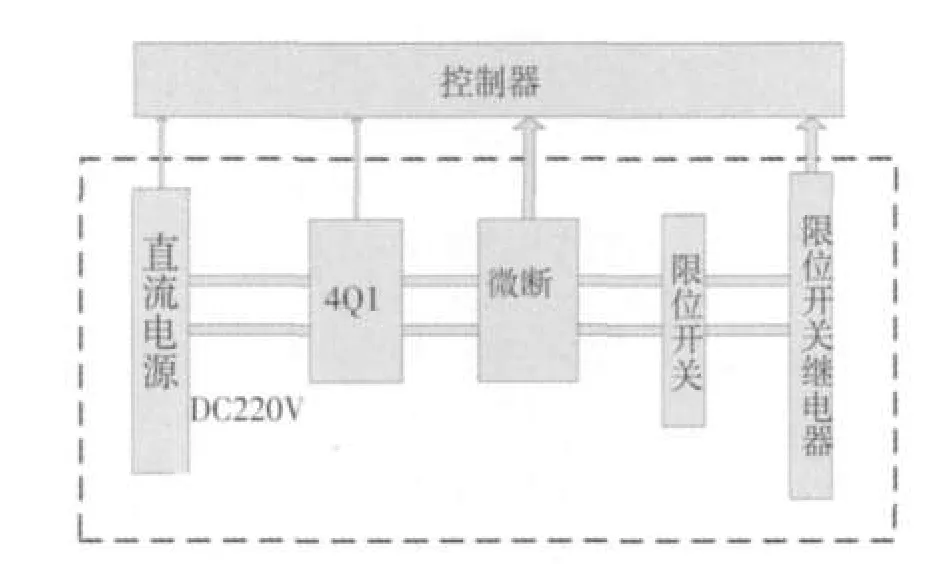
图2 限位开关信息流
出现在非限位位置限位开关触发,若系统方便检查的话沿着回路最多只需借助万用表进行检查就可找到故障原因。否则首先观测系统信息,做出初步判断。若只有91°或者96°限位开关当中的一个触发,则能确定是次限位开关故障或限位开关继电器故障需要检修(如轮毂有异物需打扫)或更换,若是91°和96°限位开关都误触发,则可能的故障为:电源电压过低,不能驱动继电器;电源总开关4Q1断开;微断没合上;回路断线或接触不良;限位开关故障;限位开关继电器故障。
系统中控制器直接采集了限位开关继电器(91°、96°限位开关)和微断(驱动器216VDC失电)的信息,若微断正常,再通过相关信息判断直流电源和电源总开关4Q1的状态,直流电源通过直流电压监视器和充电器节点判断其是否正常,电源总开关4Q1的状态通过充电器节点充电回路断线来判断,回路接触不良信息将会不止一次的出现,这样不能确定只剩下限位开关故障、限位开关继电器故障或回路断线,回路部分全在驱动柜内部,一般不会损坏,限位开关继电器一般也不会2个同时出现故障,在轮毂内有尘物2个限位开关同时损坏的情况也不经常出现,利用这些信息我们将很容易地在远方判断、分析和定位故障。针对以上问题我们应采取以下应对措施:若是电源电压过低,不能驱动继电器,可控制对电池充电,若还不行则更换电池;若电源总开关4Q1断开,合上。微断没合上,合上;若回路断线或接触不良,更换或紧固电缆线;若限位开关故障,维修或更换限位开关;若限位开关继电器故障,更换继电器。
2.编码器位置不变。编码器是完成测量电机、桨叶旋转角位移,用以控制桨叶旋转的角度的关键器件,若其位置不变,则将缺乏桨叶调节的标准,再进行调桨就无任何意义,故若出现此类情况需要切断安全链按,由电池驱动调桨电机顺桨。根据其信息流绘制编码器信息流图,如图3所示。编码器经过电缆线接口送至驱动器,驱动器又通过接线端子和电缆线接口经连接线送入控制器。
此信息流节点较多,且过程中多为控制器也没有进行监测的点,若出现编码器位置不变,需要根据信息流图来判断检测。
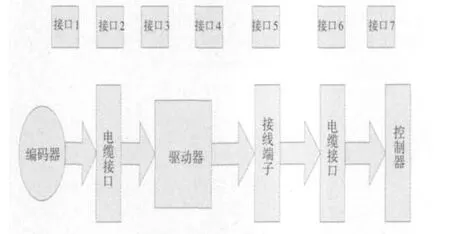
图3 编码器信息流
四、结束语
以上介绍的几种信息流故障诊断方法,已在FJK-510变桨距系统上得到了实际的检验和运用,并且取得了良好的效果,此方法不仅可以应用于风电领域的故障诊断,也可以用在其他类似的系统中。
猜你喜欢
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
军事运筹与系统工程(2020年1期)2020-09-11
铁道通信信号(2018年12期)2019-01-31
固体火箭技术(2018年6期)2019-01-18
测控技术(2018年2期)2018-12-09
军事运筹与系统工程(2018年1期)2018-11-10
通信电源技术(2016年1期)2016-04-16
军事运筹与系统工程(2015年3期)2015-09-08
振动工程学报(2015年2期)2015-03-01
