机载L iDAR点云数据的航带拼接研究探讨
2010-11-14 10:52隋立春黎恒明
测绘通报 2010年7期
王 蒙,隋立春,黎恒明
(1.长安大学地质工程与测绘学院,陕西西安 710054;2.总参测绘信息技术总站,陕西西安 710054)
机载L iDAR点云数据的航带拼接研究探讨
王 蒙1,隋立春1,黎恒明2
(1.长安大学地质工程与测绘学院,陕西西安 710054;2.总参测绘信息技术总站,陕西西安 710054)
对机载LiDAR点云数据的航带拼接问题作初步的探讨和研究。研究结果表明,经过不同扫描带间点云数据的拼接,相邻扫描带间的高程漂移大大降低,证明了研究结果可靠。
LiDAR;航带拼接;机载激光雷达;高程相对漂移;点云数据
一、引 言
机载LiDAR技术,是集激光测距技术、计算机技术、高精度惯性导航 ( INS)和高精度动态定位(GPS)技术于一体的遥感数据获取领域中的新兴技术。它能够通过测距、测角及 GPS动态差分定位,获取精确的数字地面模型及地面物体的三维坐标,同时通过随机携带的CCD相机获取对应地区的影像信息。它为获取高精度的地面三维信息提供了一种全新的技术手段,使人们从传统的单点数据获取变为连续自动数据获取,提高了观测的精度和效率,使数据的获取和处理向智能化和自动化的方向发展[1]。这项技术是继 GPS空间定位系统之后又一项测绘技术的新突破,是一种崭新的革命性的数据获取技术[2]。
机载LiDAR技术采用激光脉冲为探测手段,对天气的依赖性小,不受太阳角度的影响。与摄影测量技术相比,避免了投影(从三维到二维)带来的信息损失,高程精度优势明显。它可以大量减少地面控制测量,航空飞行中可自动调节航带宽度,提高了自动化精度,大大缩短了数据采集周期。由机载L iDAR系统获取的原始数据,通过处理可以得到高分辨率的数字表面模型 (DS M),可快速完成数字高程模型(DE M)及数字正射影像图(DOM)的大规模生产[3]。
基于机载LiDAR技术生成高质量数字产品的前提是首先获取高精度的激光点云数据,激光点云数据的完整性和精度很大程度上决定了数字产品所能达到的数据质量。且由于点云数据采集过程通常需要飞行数个不同航带,由于各类因素的影响,通过不同航带获取的点云数据存在误差,因此不同扫描带之间点云数据的拼接是LiDAR数据预处理中的重要一环。由于LiDAR系统定位的基本原理是利用测距和测角 (姿态和扫描角)的方法进行定位,并且机载 LiDAR系统的飞行高度有限,扫描角也有一定的范围,这决定了其扫描带宽是有限的。所以,在进行大面积数据采集时,必须飞行多条航带才能覆盖待测区域,同时航带间必须保持一定的旁向重叠,最终进行拼接才能得到整个测区的三维数据。在飞行时,不同航带之间系统的定位和姿态的测量不可避免地会产生误差,因而,在航带间的旁向重叠区域,不同航带解算出的同一点的高程会有差异,即高程相对漂移 (height relative offiset),使得两条航带的 DT M拼接会存在系统误差和随机误差。这直接影响 LiDAR技术在面积测量生产中的应用[3]。
因此,对高程相对漂移进行研究,改正不同扫描带之间的系统误差和随机误差,对机载LiDAR数据质量进行分析和校正,实现航带间正确的拼接和点云数据的归化,可为后续处理提供高精度的数据源,因而研究航带拼接问题和拼接方法具有重要的现实意义。本文通过研究基于最小二乘区域网平差的处理方法[4],通过地面控制特征和多个航带间的连续特征建立误差方程式消除航带间的偏移及残余的系统误差[5]。
二、航带漂移误差分析
LiDAR系统航空作业时由于旁向扫面视场有限[6],各条航带之间产生了高程漂移,因此在拼接之前需要对各航带的高程漂移误差进行评定和分析,再按照一定的模型纠正待测航带高程值,使高程漂移误差减小到允许的范围内。完成了一条航带的拼接后依次把其他航带再向基础航带靠拢。
对航带间高程漂移误差的分析可以采用下列方法:首先选择一条基础航带,以基础航带为基准,将相邻的重叠航带的点云数据与基础航带进行比较,从而分析两条航带之间的高程误差。本文主要采用两种方式进行分析比较:①在两条航带的重叠区域内分别进行DE M内插,生成两组具有相同格网的DE M,它们的高程来自于不同的航带,通过比较高程值的误差实现不同航带间高程漂移误差的分析;②在基础航带中选择一定数量的、分布均匀的连接点,将这些连接点按照平面坐标“投影”到邻接航带上,然后在邻接航带上按照连接点的平面坐标进行高程内插,比较两条航带同名点的高程,从而检查高程误差。
两种分析方法都涉及高程的内插问题,内插方法的不同对高程漂移误差的计算当然会产生影响。由于本文研究的重点是两条航带间的高程相对误差,因此内插方法的影响不是主要内容,因而本文采用逐点内插法内插连接点及DE M的高程值,这种方法具有计算简单、应用灵活、内插效率高等优点。航带高程漂移误差分析采用中误差和平均误差等作为评定的指标。
本文所用方法在航带拼接之前需要剪切基础航带与待测航带的重叠区域,找出区域内的连接点,并建立该区域的DEM。进而在重叠区域中完成航带的拼接。
1.基于不同航带DEM的评价
激光雷达是一种新型而高效的获取地形表面信息以及实时获取DE M的方法[7],因此对不同航带DE M的评价对后续拼接尤为重要。该方法的流程为:
1)确定重叠航带的重叠区域范围,并给出内插范围的坐标 (Xmin,Ymin)~(Xmax,Ymax);
2)按照上述范围分别在基础航带和邻接航带内内插DEM;
3)计算内插后两组DEM的高程差;
4)计算统计误差。
本方法的原理如图 1所示。

图1 航带漂移分析原理图
表1给出了航带拼接前,用DEM方式对交叉及平行航带漂移量作误差分析的结果。

表1 DEM误差分析结果
结果表明航带重叠区域存在航带漂移现象,说明DEM方式可以用来作误差分析。
2.基于连接点的评价
连接点是相邻航带重叠部分的公共点,对连接点的高程值作误差分析也可以用作拼接前的评价标准。该方法的流程为:
1)确定重叠航带的重叠区域范围,并给出内插范围的坐标 (Xmin,Ymin)~(Xmax,Ymax);
2)在上述范围内用邻接航带内插基础航带地面连接点高程值;
3)计算连接点内插值与原始数据的高程差;
4)计算统计误差。
本方法的原理如图 2所示。

图2 航带漂移分析原理图
表 2给出了航带拼接前用连接点方式对交叉及平行航带漂移量作误差分析的结果。

表2 连接点误差分析结果
结果表明航带重叠区域存在航带漂移现象,说明连接点方式可以用来作误差分析。
3.基于连接点评价不同航带的DEM
由于DEM具有航带信息,连接点评价DEM同样可以对航带的高程漂移作统计分析,该方法的流程为:
1)确定重叠航带的重叠区域范围,并给出内插范围的坐标 (Xmin,Ymin)~(Xmax,Ymax);
2)上述范围内用邻接航带建立起的DEM内插基础航带地面连接点高程值;
3)计算连接点内插值与原始数据的高程差;
4)计算统计误差。
本方法的原理如图 3所示。
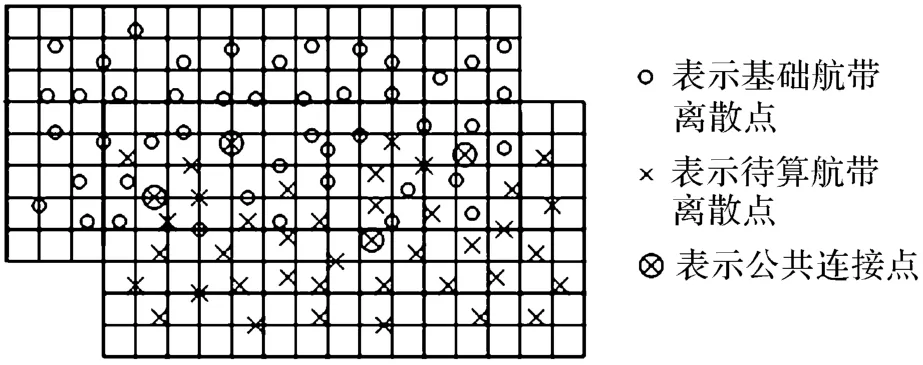
图3 航带漂移分析原理图
表 3给出了航带拼接前用连接点方式对交叉及平行航带DEM漂移量作误差分析的结果。
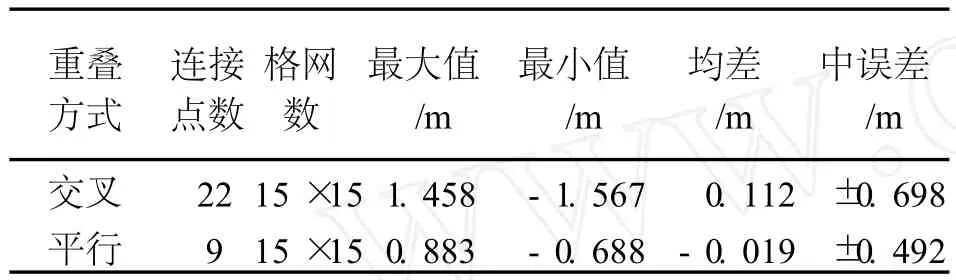
表3 连接点对不同航带DEM误差分析结果
结果表明航带重叠区域存在航带漂移现象,说明通过连接点来评价不同航带DEM也可以用来作误差分析。
三、航带拼接和高程漂移误差改正
由于在作误差分析时用到了DE M及连接点两种方法,因此在后续航带拼接中可直接利用误差分析的结果作为改正值改正待拼接航带的高程值,拟合出新的高程值,从而达到航带拼接的目的。在本文中无论以哪种方式作拟合拼接,都是通过曲面拟合法计算待测航带的高程改正值,从而达到纠正和拼接航带的目的,曲面则通过二次多项式拟合。步骤如下:
1)列出误差方程。若选择二次曲面作为拟合曲面,其公式为

则DEM格网点(或连接点)Pi对应的误差方程为

有 n个数据点的误差方程为

其中,V为改正数;X为系数矩阵;M为数据坐标矩阵。
2)计算 DEM格网点 (或连接点)的权。这里用反距离权,即
3)法化求解。根据最小二乘原理,二次曲面系数的解为

4)计算 DEM格网点 (或连接点)的高程改正值。用上述DEM格网点(或连接点)计算得到的系数 X包含整个区域的拟合曲面,通过计算得到的拟合曲面将待测航带上的点云数据拼接到基础航带上。拼接纠正后的点云数据高程误差是通过拟合后的曲面内插得到,该误差则反映了纠正后的点云数据高程精度[8]。
四、试验结果与分析
本研究采用在 Visual C++下开发的平台完成航带拼接试验,试验中分别对交叉航带及平行航带做了拼接(如图 4和图 5所示)。在重叠区域内建立DEM,并读取基础航带地面连接点。

图4 交叉航带
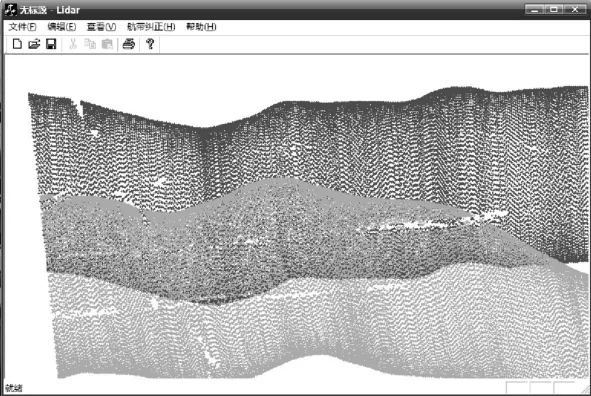
图5 平行航带
1.拼接后的精度评定
表 4、表 5给出了经过两种方法拼接后,待测航带改正值的精度评定。表 6则表示了拼接后连接点对DEM精度评定的结果。
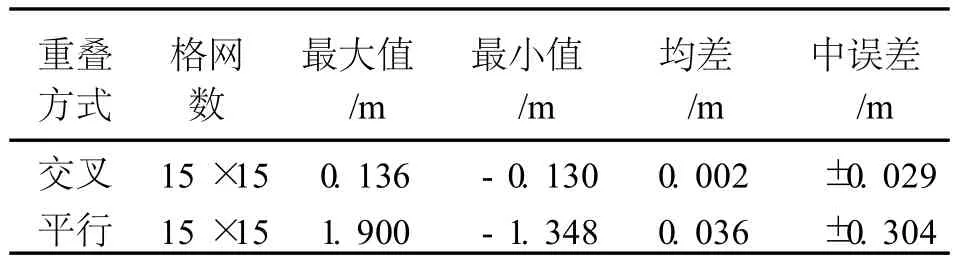
表4 经DEM方法拼接后航带的精度评定
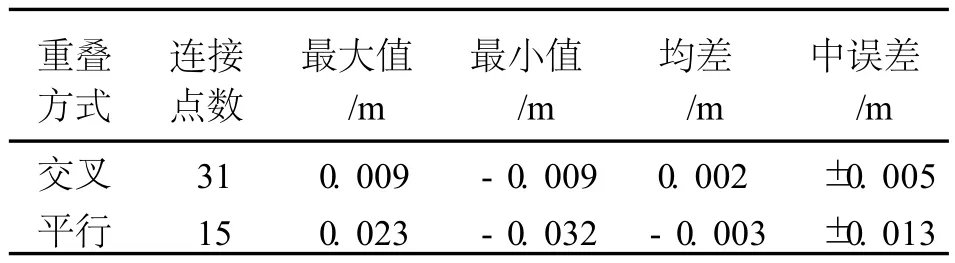
表 5 经连接点方法拼接后航带的精度评定
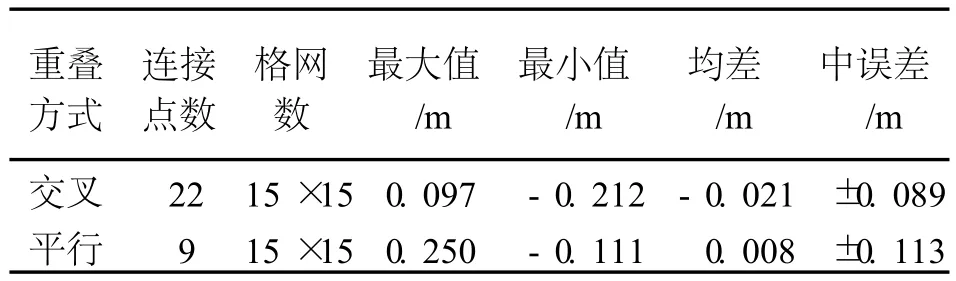
表6 拼接后检查点对不同DEM的精度评定
2.结果分析
通过表 4与表 1、表 5与表 2、表 6与表 3中的结果对比可以得出以下结论:
1)通过DEM方式,拼接前后DEM的精度有了很大提高。同样,连接点方式拼接前后连接点的内插精度也有很大提高。这说明本研究对待测航带高程值的纠正有很好的效果。
2)连接点对不同航带拼接前后的DEM的精度评价也能起到很好的效果。
3)交叉航带拼接效果要比平行航带拼接效果稍好一些。
虽然此方法能够起到拼接航带的目的,但是仍存在一定误差。经过简单分析,误差出现的情况有以下几点:①连接点个数过少,连接点不能完全拟合出地形曲面;②连接点内插时存在误差,计算时由于误差传播定律误差被带入了后续的拟合及精度评定中;③地形本身具有复杂性,计算时并没有考虑坡度等因素的影响,坡度较大时仅靠数据点的权值不能消除坡度的影响;④对于交叉航带比平行航带效果更好的原因是由于交叉及平行航带拼接时用到的是同一块区域,在拼接平行航带时用到的连接点比拼接交叉航带时用到的连接点少,计算不如交叉航带精确。
五、结束语
本文对L iDAR点云数据航带拼接作了初步探讨,通过编程实现了两种方式的航带拼接和纠正。试验结果表明本文提出的航带拼接试验以及采用的拼接方法对于改正不同航带间高程漂移误差是有效的,同时DEM方式由于覆盖面积大、格网点多、精度高等原因比连接点方式更加适合用于航带拼接。LiDAR数据的航带拼接受很多因素影响,拼接时应考虑连接点个数、内插方法、定权方式等很多因素。另外,还要根据不同类型的地形选择合适的拟合曲面。
[1] 孙步阳.机载激光雷达航带拼接技术研究[D].武汉:中国地质大学,2009:1-2.
[2] 廖丽琼,罗德安.地面激光雷达的数据处理及其精度分析[J].四川测绘,2004(4):1-2.
[3] 李树楷,薛永祺.机载扫描式激光测距-多光谱成像制图系统[J].武汉测绘科技大学学报,1998(4):1-2.
[4] TOTH C K.2002 CalibratingAirborneLiDAR System[C]∥Proc ISPRS Commission II,Symposium,20-23August, Xian,China.Xian:[s.n.],2003:475-480.
[5] 邬建伟.机载 L IDAR系统检校和航带平差方法研究[D].武汉:武汉大学,2008:3-4.
[6] 尤红建,刘彤,李树楷,等.机载三维成像仪航带拼接的误差处理研究[J].遥感学报,2001,5(2):2-3.
[7] 隋立春,JOERGALBERTZ(德).基于数字图像处理的方法对激光雷达数据进行分析[J].测绘学报,2007, 2(36):1.
[8] 张祖勋.张剑清.数字摄影测量学[M].武汉:武汉大学出版社,2006:42-43.
On StripM osa ic for A irborne L iDAR Point Cloud Data
WANGMeng,SU ILichun,L IHengming
0494-0911(2010)07-0005-04
P237
B
2010-05-05
国家自然科学基金项目(40971306,40974010);国土资源大调查项目(1212010914015)
王 蒙(1986—),男,辽宁沈阳人,硕士生,主要从事地理信息、遥感方面的研究。
猜你喜欢
当代陕西(2020年23期)2021-01-07
河南城建学院学报(2020年3期)2020-08-14
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
新课程·小学(2017年8期)2017-09-20
汽车文摘(2016年6期)2016-12-07
测绘科学与工程(2016年5期)2016-04-17
安徽地质(2016年4期)2016-02-27
电测与仪表(2015年3期)2015-04-09
全球定位系统(2015年4期)2015-02-28