无速度变频控制系统在矿山机械传动中的应用
2011-01-23 01:35谢锦秋董丽丽
中国矿业 2011年1期
谢锦秋,董丽丽
(河北联合大学,河北 唐山 063000)
1 概述
目前,我国矿山机械传动调速控制多数采用V/F控制,在高转矩,高精度的工况下不能满足调速控制要求。为了达到高精度的转速闭环控制及磁场定向的需要,在电机轴上安装了速度传感器。但是有许多场合不允许外装任何速度和位置检测元件,此外安装速度传感器一定程度上降低了调速系统的可靠性。随着交流调速系统的发展和实际应用的需要,国内外许多学者和科技人员展开了无速度传感器的交流调速系统研究,成为交流调速技术一个重要的应用研究领域。
本文基于TMS320LF3407的高性能的异步电动机无速度传感器矢量控制系统,充分利用了DSP的高速运算能力和丰富的片内外设结构、使电机控制度外围电路简单,结构紧凑。从试验结果可以看出,系统采用软计算代替了速度和位置检测元件,提高了调速的可靠性。修正的自校正方法,增强了控制系统的鲁棒性,改善了系统的动态性能。一定程度上极大的促进了需高精度、高起动转矩的矿山机械传动交流调速要求。
2 传动过程中的速度辨识原理
2.1 速度辨识方法
采用模型参考自适应(MRAS)法进行速度辨识,在静止坐标系下,将含有真实速度ωr的转子回路方程视为参考模型,将含有待辨识的速度ωr的转子回路方程视为可调模型,根据Popov超稳定性定理可得到转速ωr的辨识结果ωr,ωr与定子电流、参考模型和可调模型的状态变量ψr,ψr有关.采用模型参考自适应( MRAS)法可以获得较好的稳定性及较高的控制精度。
自适应的感应电机转速辨识器设计
记被辨识对象和并联估计模型如下:
辨识对象
(1)
(2)
并联估计模型
(3)
(4)

(5)
方程式(1)~(3)是在静止坐标系中给出的,为便于推导自适应律,假设转速ωr为常数.由式(2)减去式(4),可得误差方程如下:
(6)
记
(7)
(8)
自定义律为
(9)
(10)
根据Popov超稳定性定理知道,如果满足下列条件:
(1)H(s)=D(SI-A)-1为严格正实矩阵;

即:模型参考自适应系统是渐近稳定的。可以证明该模型参考自适应系统是渐近稳定的。假设转子时间常数Tr可以准确获得,可得转速ωr的自适应律如下:
(11)
2.2 转速辨识设计方法
在αβ定子坐标系下,电机模型可由以下方程描述:
(12)
(13)
(14)
(15)
式中,im为励磁电流矢量;em为定子绕组上的感应电势。
由式(14)、式(15)可得
(16)
(17)

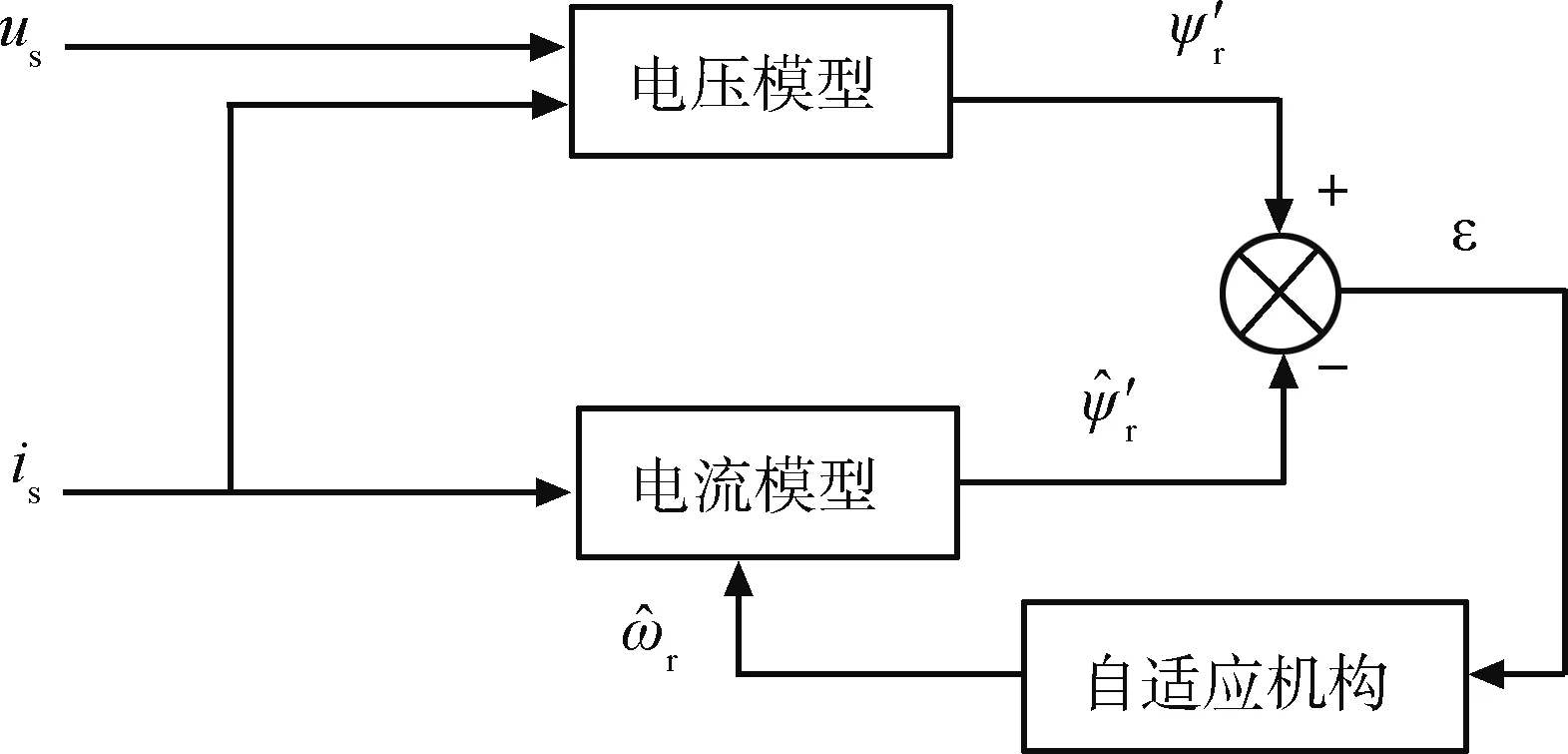
图1 并联双模型转速观测器
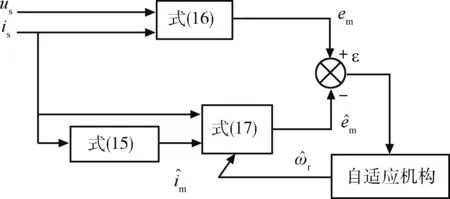
图2 改进的MRAS速度辨识结构图
在上述改进的MRAS方案中,由于参考模型中不含纯积分环节,系统在低速时可获得较好的性能.然而定子电阻阻值随温升而变化,这将直接影响系统的性能和模型参考自适应速度辨识器的稳定性,所以,如何使系统对定子电阻阻值变化具有低灵敏度便成为进一步改进辨识结构的要求. 图3给出了改进的新型速度辨识器的结构图。
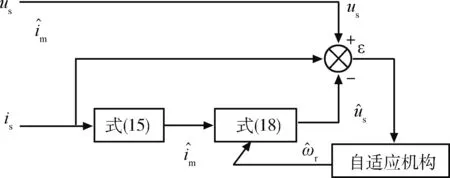
图3 改进的新型速度辨识器
将式(17)代入式(16)

(18)
3 调速控制系统的设计及技术方案
3.1 TMS320F2407的结构和特点
TMS320 LF2907是TI公司高性价比的DSP器件。它具有相同的16位定点DSP内核和指令集,该指令集源码向下兼容TMS320C2x系列、向上兼容TMS320C5000系列,具有良好的可移植性。特点如下:
①指令周期33ns,运算能力30MIPS;②独立
的读写数据总线和地址总线,支持并行的程序和双数据操作数寻址;③支持并行算术逻辑(AIU)运算和乘法运算;④硬件堆栈,加快中断处理其体系结构图如图4所示。
DSP内核的高性能运算能力,使TMS320 LF2407可运行复杂控制算法,如采用高阶PID算法进行精密控制,自适应Kalman滤波算法可减小功率损耗,还可以用FFT算法对电机的机械谐振、线性谐波等进行分析。“事件管理器”可输出PWM脉冲,直接控制电机功率驱动器,此外还包括定时器、比较/捕获、死区控制逻辑、空间矢量PWM发生器和直接与光电编码器接口的编码单元。TMS320LF2407片内外设包括一对A/D转换器、2个串口、CAN控制器模块和看门狗定时器及实时中断定时器。
3.2 调速系统的硬件设计
系统的硬件结构框图如图5所示。系统的控制核心是TMS320LF2407,逆变模块IPM是由富士公司生产的7MBP50-RA120。该智能模块内含驱动电路、过流保护、断路保护、过热保护电路、报警输出电路、制动电路。整个模块采用陶瓷绝缘结构,可直接装在散热片上。整流模块采用6RI00G,电流检测电路由接在逆变桥输出端的霍尔传感器电路组成,相电压检测电路为霍尔传感器电路。接口电路主要是指键盘和显示电路以及内存扩展电路。
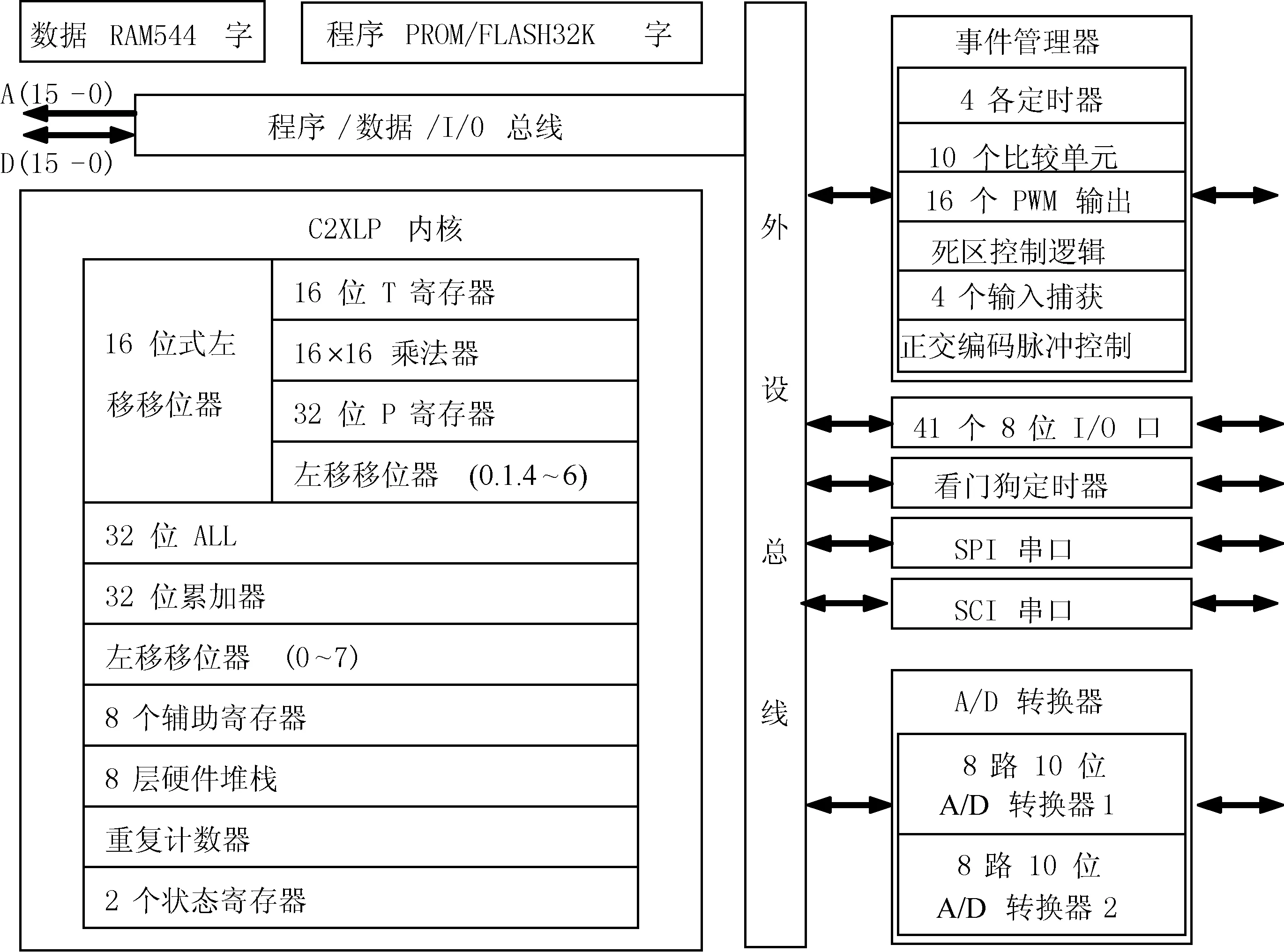
图4 TMS320LF2407的体系结构
3.3 调速系统的软件设计
图6中,初始化程序主要完成DSP硬件及软件变量的初始化,使能中断的功能;初始化程序由TMS320LF2407的复位中断驱动执行DSP的复位中断是一种不可屏蔽中断,可由系统上电、片内看门狗定时器溢出、非法地址操作及软件指令触发,初始化程序仅在系统复位及程序开始时执行工次。运行程序则包括一个无限循环和一个中断服务程序,其中中断服务程序由电流及转速计算、坐标变换、PWM信号产生及故障保护等多个功能模块构成。各功能模块按一定的顺序关系,在固定的时间周期内执行,由GPTimerl的下溢中断来启动程序的运行(图7)。
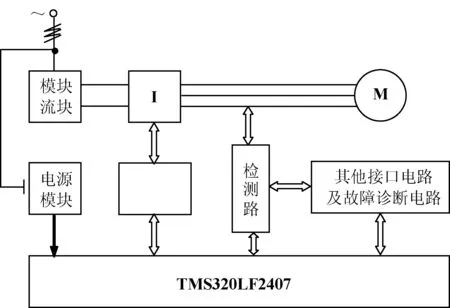
图5 控制系统的硬件结构
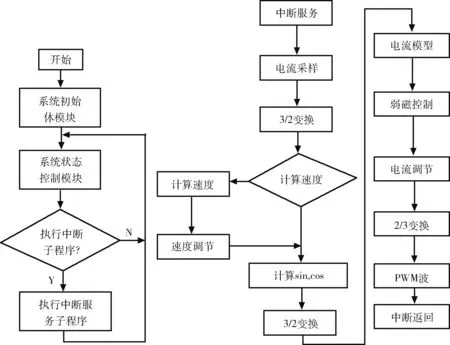
图6 主程序流程图 图7 中断服务程序
4 传动系统的仿真与实践
由图8知,矢量控制系统由速度调节器,直接转矩控制部分及逆变器等构成,矢量控制部分主要完成磁链滞环比较、转矩滞环比较、最优开关逻辑选择、磁链、转速辨识及坐标转换等功能。
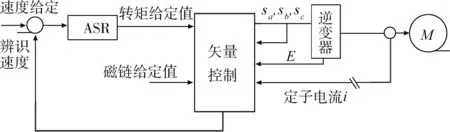
图8 矢量控制系统的结构框图
首先对一四极电机进行了运行试验,其额定功率为10kW,额定电压为380 V,额定电流为19.7A,额定转速为1460r/min。
图 9、图10分别给出了电机速度与转矩的仿真曲线。
电动机的调速仿真和运行试验对理论和计算公式进行了验证,得到了比较满意的结果。
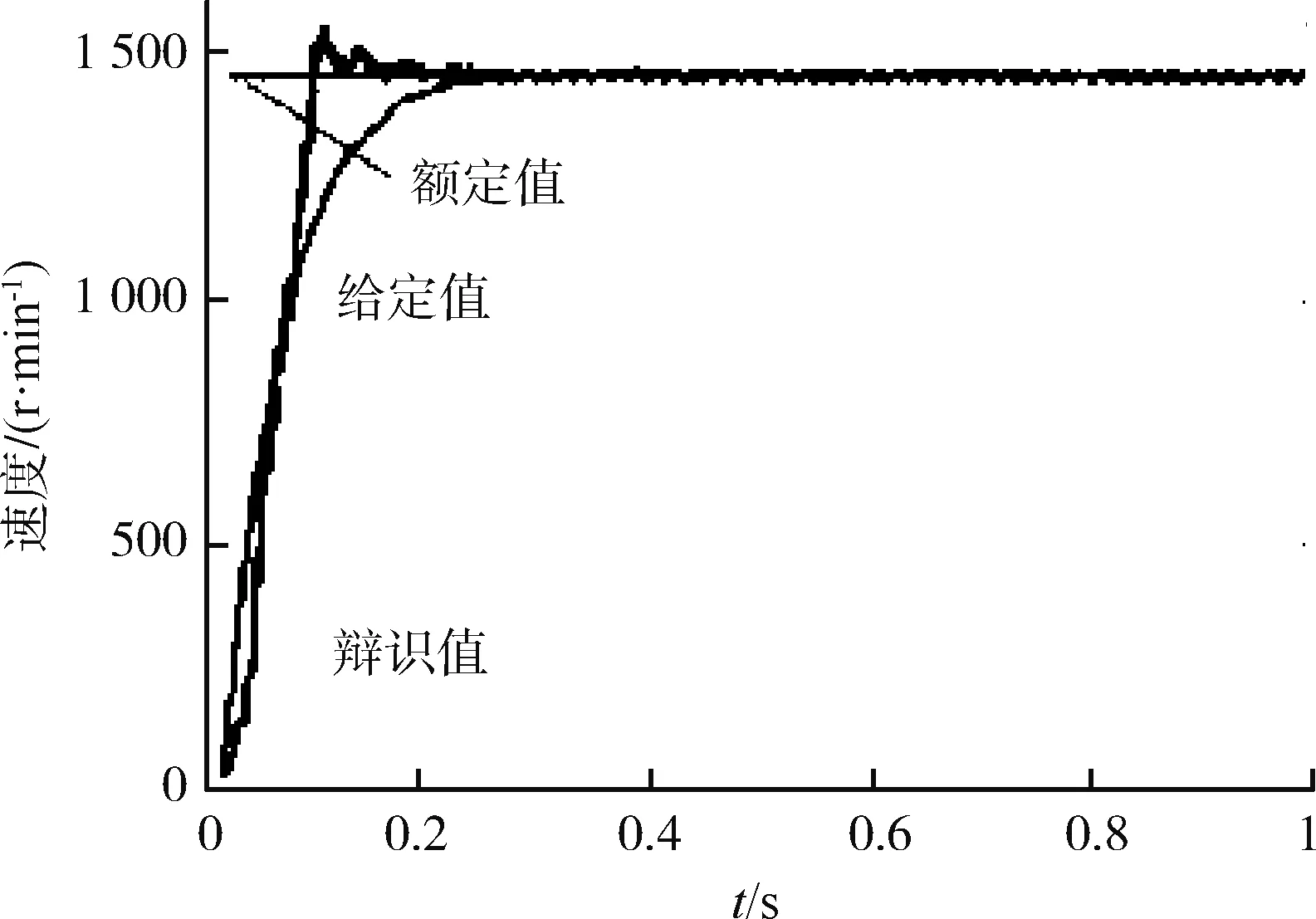
图9 电机速度给定与仿真曲线
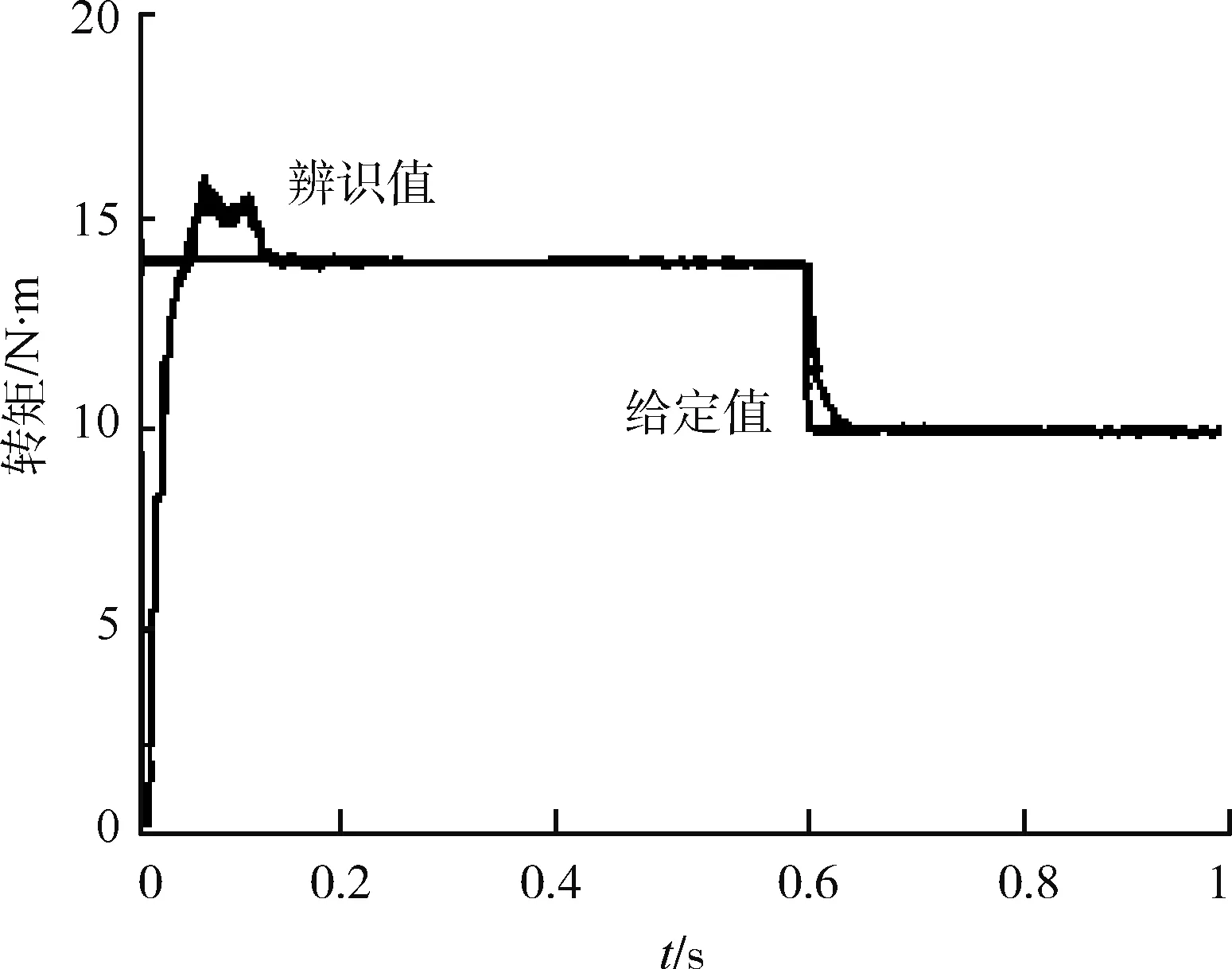
图10 电机转矩给定与仿真曲线
5 应用与推广
基于TMS320LF3407的高性能的异步电动机无速度传感器矢量控制系统,充分利用了DSP的高速运算能力和丰富的片内外设结构、使电机控制度外围电路简单,结构紧凑。从实践结果可以看出,系统采用软计算代替了速度和位置检测元件,提高了调速的可靠性。修正的自校正方法,增强了控制系统的鲁棒性,改善了系统的动态性能。使矿山机械传动控制启动平稳,运行可靠,调速系统精度高,使交流电动机的控制具有直流电动机的特性,降低调速成本,提高生产效益。
[1] 李忠玉. 新型交流电机 CN2459811[P].
[2] 井浦英昭,野中和浩,等.安川电机交流电动机的无传感器矢量控制方法及其控制装置[S].CN1699213 株式会社.
[3] 张航生.一种用于高压交流电机的磁可控软启动装置[P].CN2836335
[4] 伊维彬,李广树.MG400/920WD电牵引采煤机变频调速系统 [J]. 煤炭科学技术,2002,21(8).
[5] 惠万里,孙国启.现场总线控制的变频器在采煤机中的应用 [J]. 煤炭科学技术,2005,33(5).
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
通信技术(2018年11期)2018-11-07
智能计算机与应用(2018年6期)2018-10-31
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
现代防御技术(2016年1期)2016-06-01
通信电源技术(2016年1期)2016-04-16