
基于EtherCAT的高性能伺服电机组的现场总线控制系统研究
2011-02-09 01:57施大发
制造业自动化 2011年4期
施大发
(湖南机电职业技术学院,长沙 410151)
0 引言
随着工业生产设备向着系统化、规模化的方向发展,基于工业以太网的运动控制系统在一些数控系统中得到了很广泛的应用,工业以太网通信具有传输速度快,通信数据量大等种种优点,对推动机电一体化设备的快速发展起到了很大的作用。随着网络通信技术的不断发展,目前,在一定程度上,网络伺服系统成为当前伺服系统发展的主要方向之一。在此情况下,德国BECKHOFF公司推出了Ether CAT现场总线技术,它具有配置简单,数据传输高速、高效等种种优点。而且,在网络结构上,几乎支持所有的拓扑类型,包括线型、树型、星型等,每个系统可以配置多达65535台设备,这种总线类型对于大规模的运动控制系统的设计具有很好的优势,本文对基于Ether CAT 的高性能伺服电机组的现场总线控制系统进行了一定的设计研究。
1 控制系统总体架构设计
基于Ether CAT的控制系统一般采用的是主从式的架构,主站由PC机配置标准的以太网卡来担任,从站一般采用专用芯片进行设计,主站起到主要的系统控制作用,向总线上的设备发送相应的命令,从站根据自己的地址取出相应的控制命令,根据命令进行伺服电机的运动控制动作。本系统从站的设计采用倍福公司推出的从站控制器ET1100和单片机进行设计,系统的总体架构如图1所示:

图1 基于Ether CAT的现场总线控制系统总体结构图
伺服电机的运动控制系统属于闭环调节系统,由运动控制器,伺服驱动器,伺服电机以及相关的位置或者速度检测装置组成,其中最常见的检测装置是编码器,各个部分通过线缆连接在一起完成高性能的伺服电机的控制功能。图2是全闭环运动控制系统的结构框图。
伺服运动控制系统的作用是接受上位机信号,驱动被控对象按照指令进行运动,保证运动部件的快速性和准确性,从一定程度上来说,上位机控制信号也可以算是运动控制器的一部分,该系统中,主站运动控制部分与Ether CAT总线以及从站单片机部分共同构成了伺服电机组的现场总线运动控制器。伺服电机编码器作为系统的反馈装置。同时从伺服电机运动控制的实时性和准确性方面考虑,运动控制采用双闭环控制,其中由伺服驱动器和编码器构成了反馈内环,由于伺服驱动器反应的快速性,保证了该系统调节的实时性。由单片机、伺服驱动器和编码器构成了外闭环控制,通过一定的软件计算方法保证了运动的准确性。
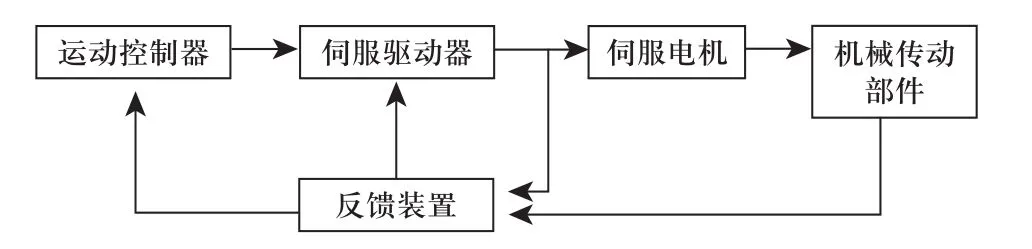
图2 全闭环运动控制系统的结构框图

表1 ET1100资源表
2 主站设计研究
Ether CAT主站的作用是发起通讯,而且,两个从站之间要进行通信,必须要把主站当做中间路由器,通过主站完成。从原理上来说,Ether CAT不支持两个主站之间的通信,但是,如果其中的一个主站具有从站的功能是,也可以在两个主站之间进行通信。主站在设计的硬件方面并没有特别的需求,只需要一块标准的以太网卡即可,主站的功能基本上是靠软件来实现的。本系统中,利用VC编写的应用程序根据用户的相关设置,将用户的命令转化成相应的命令控制字,对命令控制字进行打包、发送和接受等过程。另外,该软件功能还包括解析系统硬件组成及相关文件,提供与网卡的接口,并提供与其他网络协议间的接口,完成于其他系统及通信协议的对话功能。
3 从站系统设计研究
Ether CAT网络中,最多可以有65535个从站结点,而从站结点从结构上来说,又可以分为简单结点和复杂结点,其中简单结点一般利用从站控制器自身的I/O资源就可以实现相应的功能,本系统选用倍福公司推出的从站控制器ET1100,本身带有丰富的I/O资源,如表1所示。
本系统采用的是复杂结点的方式,由从站控制器ET1100和单片机共同实现从站功能。完成从Ether CAT网络中读取数据,并进行数据交换等应用程序的功能。
从站应用程序控制器通过中断方式读取Ether CAT网络中的非周期性的数据,而通过查询的方式存取周期性的数据,从而执行相应的应用程序。
从站控制器除了完成与Ether CAT网络中的其他设备进行通信以外,更重要的是将Ether CAT上接受到的控制命令转化成伺服驱动器的指令,完成相应的闭环控制功能。从一定程度上来说,伺服电机组的运动控制的性能决定于从站的设计,一般来说,常用的伺服控制有三种方式,包括速度控制方式、转矩控制方式以及位置控制方式,其中位置控制方式是利用脉冲来进行控制的,通过单片机的I/O可以模拟脉冲发生器,完成相应的控制功能,而速度和转矩控制方式都是利用模拟量来进行控制的,利用单片机控制时,要利用一定的DA转换功能或者单片机的模拟量输出口进行。本系统设计了具有位置控制、速度控制和转矩控制三种控制模式的硬件接口电路,可以很好的实现对不同的控制对象的不同的控制要求。驱动器的反馈信息可以通过编码器来读取,也可以通过驱动器的控制口读到对应的转矩和转速,通过AD转换电路转换以后,读入单片机进行处理。
与从站硬件系统的结构相对应,从站单片机的软件控制包含两个部分的内容,一部分是系统的通信功能,单片机与ET1100进行通信连接,完成与上位机系统的通信过程,另外一部分是用于对伺服系统的控制和伺服系统反馈数据的采集,软件的工作过程如下:首先,单片机开机进入程序的初始化阶段,这个阶段的主要工作是完成从站相应的配置工作,包括建立主站和从站之间的通信,初始化相关的寄存器,设置通信类型等,然后,完成初始化工作,程序进行周期运行的阶段,等待Ether CAT总线上控制命令的到来,当接收到响应的控制命令时,则对该命令进行一定的处理,然后发送给驱动器,然后,读取驱动器反馈信息,进行数据的打包处理,将驱动器读到的反馈信息打包成固定格式的子报文结构,并反馈回Ether CAT总线,从而反馈到主站控制器部分。完成通信的过程,从站软件的流程图如图3所示。
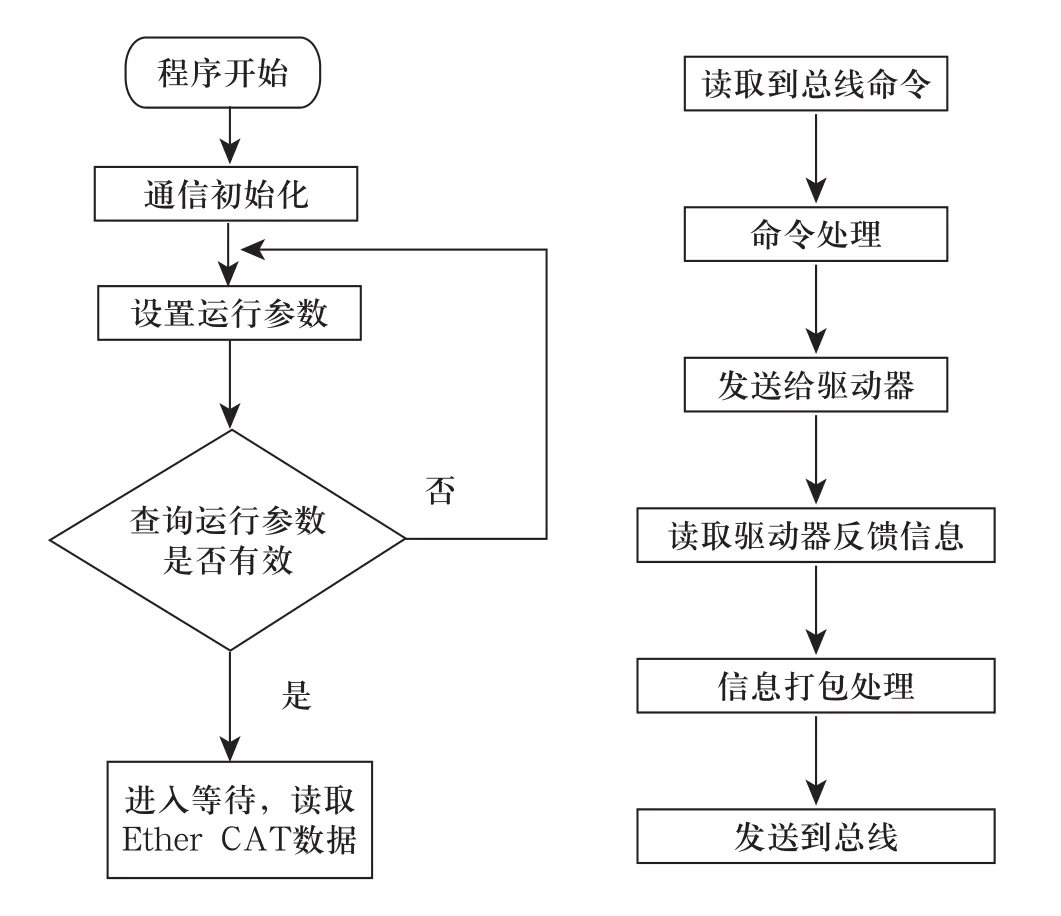
图3 从站单片机程序流程图
4 结论
Ether CAT工业以太网具有成本低、时效性高、扩展性强等种种优点,随着工业生产设备向着智能化、规模化等方向发展,在未来的工业控制领域必将成为工业网络的发展主流。
本文对基于Ether CAT的高性能伺服电机组的现场总线控制系统进行了一定程度的研究,研究了该系统的主题框架,对现场总线控制系统的主站以及从站的软件和硬件进行了设计。系统的实际运行结果表明,系统具有很好的实时性和准确性,能够满足高性能伺服电机组的现场控制的实际需求。可以很好的运用于数控设备和工业机器人中。
[1] Beckhoff G, Ether CAT: The Ethernet fieldbus[z], Ether CAT Technology Group, 2006.
[2] 许大中.交流电机调速理论[M].浙江:浙江大学出版社出版. 1997.
[3] 何国军.陈维荣.刘小强.孙丛军.基于DSP与FPGA的运动控制器设计[J].电子技术应用.2009(7).
[4] 谢香林.李木国.Ether CAT网络及其运动控制系统研究.中国科技论文在线.http://www.paper.edu.cn.
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
微特电机(2020年11期)2020-12-30
电脑爱好者(2020年6期)2020-05-26
中国水能及电气化(2019年10期)2019-11-07
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年5期)2017-11-23
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
电子制作(2016年1期)2016-11-07
