
深井救援机械手的机构设计
2011-03-07 11:27丁昌鹏
三峡大学学报(自然科学版) 2011年2期
丁昌鹏 张 屹 张 虎 王 盈
(三峡大学机械与材料学院,湖北宜昌 443002)
深井掉人事故发生频繁,据有关部门统计全国每年发生此类事故万余起,由此造成的生命财产损失无法估量.机井是农村重要的灌溉和饮用水源,很多机井安置在地头路边,多数机井没有掩盖物,周围也没有提示标志,特别是一些废弃的机井,隐藏较深,难以使人及时发现并引起注意,由此造成的深井掉人事故较多.目前,虽然有些深井救援类的装置,但是这些装置在一些方面存在着的较大缺陷,未能为深井救援带来便利,没有得到广泛的利用.常用的营救方法是施救人员下井施救或者动用挖掘机等大型设备施救.由于井一般较深,施救人员直接下井施救会给施救人员带来缺氧、卡在井中等诸多威胁,而且井的口径过小时施救人员根本无法下井;利用挖掘机等大型设备救援,救援时间过长、安全性差,无法保证井下被困人员的生命安全,如果井的深度超过15m,利用挖掘机也无法实施营救.设计一种高效、高成功率的机械手代替消防队员下井实施救援,能够在很大程度上减少生命财产损失,减少悲剧的发生.
1 设计思路
该设计的主要思路是用机械手代替施救人员下井施救,这样能够避免在施救过程中给施救人员带来的安全隐患,解决由于井口太小施救人员无法下井施救的难题,提高救援的效率和成功率.要完全代替施救人员下井施救,机械手要有较高的灵活性和可控性.被困人员在井底的被困形式多样,机械手必须能够适应于多种复杂情况下的救援工作,设计时必须保证机械手能够灵活地调整自身的状态,操作人员能清楚地观察井底的情况并实时控制机械手的各个动作,保证在救援的过程中不会对被困人员造成二次伤害.
2 总体方案设计
深井掉人事故发生时,被困人员被困在井底情况大致可以分为两种:被困人员身体处于竖直状态和被困人员身体处于平躺状态.在井里,被困人员身体姿态是多样的,使用单一的夹持机构不能够满足救援需求,机械手的夹持机构设计成可更换的两种机构.由于井的口径大小及人的体型都是不一的,机械手机构中多采用可伸缩机构,使得机械手能够适用于一定范围内不同口径井及不同体型的人的救援.井一般较深,在救援时采用已有的装置——救援三脚架悬挂机械手,控制机械手大范围的升降.在机械手上装上防水摄像头,并在地面配有相应的显示屏,通过摄像头将井底的图像传到地面显示屏,地面操作人员根据显示屏显示的图像控制机械手的动作.在夹持机构上装有压力传感器,实时监测被困人员的受力情况,避免在救援过程中对被困人员造成二次伤害.机械手工作过程中承受的载荷由人的体重决定,采用伺服电动机作为动力元件即可满足动力需求,并且能够精确地控制机械手的各个动作.为减轻机械手自身的重量,机械手自身不携带电源,电源放置在地面.通过控制各个伺服电机的输入信号即可控制机械手的动作.机械手的整体图如图1所示.

图1 机械手整体图

图2 机械手工作原理图
3 深井救援机械手的机构设计
3.1 定位机构
如图3所示,定位机构是一伞状的伸缩机构,能够适用一定范围内不同口径的井的救援工作.伞状伸缩机构由十字滑动架的上下滑动实现支撑杆的张开与合拢,十字滑动架上连接钢绳,通过手动向上拉动钢绳实现十字滑动架的向上滑动.滑动架向上滑动时支撑杆撑开,当支撑杆撑到井的内壁时,撑开时如图4所示,滑动架将不能再向上滑动,4根支撑杆同时作用于中心杆达到固定中心杆的目的,使得中心杆不能转动.中心杆上的吊环与三脚架上的钢绳连接,下端与机械手的其他部件相连,整个装置的重量由中心杆承受,起到稳定装置的作用.定位部分在完成定位动作后再执行后面的动作,从而保证了后面动作的稳定执行.


机械手适用于直径是400~800 mm的井,支撑杆长400 mm,支撑杆与中心杆的最小夹角是30°,最大角度是90°.十字滑动架长L=120mm,可得十字滑动架的行程是

3.2 调位机构
机械手的调位机构包括旋转调位机构、水平的平移调位机构、竖直方向的上下调位机构及机械手的翻转调位机构,各个机构协调控制机械手的空间位置使机械手能够适用多种复杂情况的井底救援工作.
(1)旋转调位机构
如图5所示,电机固定在外盒上表面,电机输出轴连接小齿轮,定位机构完成定位动作后,中心杆位置被固定,固定在中心杆上的大齿轮不能旋转,当电机驱动小齿轮转动时,小齿轮带动外盒绕大齿轮转动,装置的其他部件连接在外盒上,从而实现机械手旋转调位.

图5 旋转调位机构
选取转速为15r/min的伺服电机,即小齿轮转速为15r/min,选取大齿轮与小齿轮的齿数比μ=3,小齿轮齿数z1=18,小齿轮做悬臂布置,选取齿宽系数φd=0.5,模数m=2,则在旋转调位时,机械手旋转的速度为5r/min.
小齿轮分度圆直径

大齿轮分度圆直径

两齿轮中心距


齿轮宽度(2)水平平移调位机构
如图6所示,伺服电机安装于外盒(上)的侧面,伺服电机输出轴连接丝杠,两光杠起导向作用,滑动螺母与外盒(中)通过连接螺母连接在一起,电机通过丝杠螺母传动带动外盒(中)沿光杠滑动,其它的部件与外盒(中)连接在一起,从而实现夹持机构水平方向的移动.采用转速n=200 r/min的直流电机驱动丝杠,螺母行程是200 mm,丝杠螺纹采用梯形螺纹,中径d2=9.00 mm,公称直径d=10 mm,螺距p=2 mm.1min内,螺母相对丝杠的移动的距离为s,由文献[1]中P251公式(12-23)知


图6 水平方向的平移调位机构
螺母相对丝杠的移动速度

螺母高度



丝杠螺母间的摩擦力要远小于F,故丝杠螺母满足要求.
(3)上下调位机构、翻转调位机构
两部分均由丝杠螺母传动实现装置调位动作,其基本结构如图7所示.

图7 竖直方向调位机构和翻转调位机构
上下调位原理:伺服电机(1)的输出轴与丝杠(1)连接,电机(2)固定在滑动螺母(1)上,光杠起导向和连接的作用,滑动螺母(2)与外盒(下)通过连杆连接在一起,光杠和连杆与外盒(下)、滑动螺母(2)与连杆之间均采用销钉连接.伺服电机(1)驱动丝杠(1)转动,带动滑动螺母(1)向下滑动,与电机(2)连接的丝杠(2)随着滑动螺母(1)向下运动而一起运动,外盒(下)跟随着做相应的上下运动,外盒(下)与夹持机构连接,最终实现夹持机构的上下运动.
采用n=100r/min的直流电动机驱动丝杠转动,丝杠螺母的选用同平移机构中的丝杠螺母,丝杠的承受的轴向力主要是被困人员的体重,成人的体重一般不会超过700N,根据文献[2]中P96公式(5-43)有

故选取直径为10mm的丝杠,行程是400mm.
翻转调位原理:图8是机构没有翻转前的状态,采用曲柄滑块机构的原理,滑动螺母(2)相当于滑块,外盒(下)相当于摇杆,以滑块作为原动件,摇杆作为从动件,伺服电机(2)的输出轴与丝杠(2)连接,电机(2)驱动丝杠(2)转动,带动滑动螺母(2)向下滑动,滑动螺母(2)向下的滑动带动外盒(下)做翻转运动.翻转后的夹持机构状态如图9所示.


结构简图如图10所示,夹持机构翻转成水平时(虚线所示位置),丝杠所受的轴向力F最大.

图10 翻转后丝杠受力简图
取FD′=G,G=700 N,lCD′=200 mm,lB′C=100 mm.根据∑MC=0有

螺母是整体螺母,故取φ=1.5,丝杠和螺母均采用钢作为加工材料,且该丝杠螺母传动属于低速传动,由文献[2]中P97表5-12,许用压力取[p]=7.5 MPa,由文献[2]中P96公式(5-43)知

故取公称直径为d2=15mm的丝杠.
3.3 夹持机构
针对被困人员被困形式的多样性、复杂性,机械手的夹持机构设计成两种可以更换的机构,即夹持机构(一)和夹持机构(二),两种夹持机构都具有可伸缩调节性,以适应不同体型人的救援.
(1)夹持机构的伸缩调节机构
该调节机构由锥齿轮传动带动丝杠的转动实现夹持机构的伸缩,其结构如图11所示.
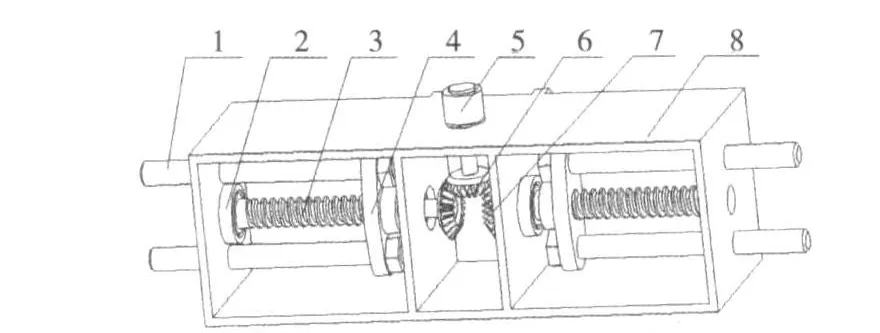
图11 沿Y轴平移调位部分结构
夹持机构伸缩原理:伺服电机输出轴与直齿锥齿轮(1)连接,直齿锥齿轮(2)与丝杠连接,电机通过锥齿轮传动驱动丝杠转动,丝杠的转动带动滑动螺母做平移运动,光杠一端固定在滑动螺母上,另一端与夹持机构相连接,光杠做伸缩运动,从而实现了夹持机构的伸缩运动.
(2)夹持机构(一)
当被困人员身体在井中间处于竖直状态(与井内壁间的空隙较小)的时候使用该机构实施救援,其结构如图12所示.伺服电机输出轴与丝杠连接,夹持杆通过连接器与滑动螺母以转动副相连接,转动导向块与外盒采用转动副连接,转动导向块轴线与夹持杆的轴线在同一条直线上.在初始状态时,夹持杆处于收起状态,如图12所示.当整个夹持机构下降到合适的夹持位置时(接近被困人员的腋下部位),电机驱动丝杠转动,丝杠的转动带动滑动螺母向下滑动,当滑动螺母向下滑动时,夹持杆向下运动,从导向块向外伸出,当夹持杆下降到水平时,停止电机的驱动,此时两对称的夹持杆形成一个正方形的环,如图13所示.

图12 夹持机构(一)初始状态

图13 夹持机构(一)伸开时状态
夹持杆伸出到水平时,丝杠承受的轴向力F最大,其受力简图如图14所示.

图14 夹持杆受力简图
已知lAB=50 mm,lBC=200 mm,F=2FA,FC为人体重的一半,即FC=G/2,成人体重一般不会超过70kg,故取G=700N,根据∑MB=0有

则F=2FA=2800N,由文献[2]中P96公式(5-43)知

故取公称直径为d=15 mm的丝杠.
夹持杆的材料为45钢,直径d=20 mm,夹持杆在截面B处的弯曲正应力最大,截面B处事危险截面,对截面B处进行强度校核.B截面处的弯矩:

根据弯曲强度条件

杆满足强度要求.
(3)夹持机构(二)
当被困人员与井内壁间的空隙较大(平躺或者斜躺)时,采用此种夹持机构实施救援.夹持机构由一对可伸缩臂、爪子及机架组成.通过伸缩臂的横向运动,调节爪子的横向位置,使爪子处于合适的位置,从而对被困者执行抱起动作.爪子上面安装有压力传感器,当压力达到某设定值的时候,压力传感器将获得的信号传输给显示屏,操作人员对电机进行控制,使爪子停止运动,从而保证爪子不至于因夹持力过大而对被困人员造成二次伤害.
图15是夹持机构(二)的结构图,爪子上下各有一对,初始位置时,上面的一对爪子在上面,下面的一对爪子处于基本竖直的位置,伺服电机输出轴与丝杠连接,爪子(上)固定在滑动螺母上,爪子(下)通过连杆连接在滑动螺母上,电机驱动丝杆转动,滑块向下滑动,带动爪子(上)向下平移运功的,爪子(下)向上转动,两对爪子间的间隙减小,实现夹紧.

图15 夹持机构(二)结构图
4 深井救援机械手工作过程
根据被困人员身体在井底的状态,被困人员在井底的被困形式可以大致分为身体处于竖直状态和身体处于平躺状态,对两种不同的状态机械手的所执行的动作和使用的夹持机构不同,下面对两种情况下机械手的救援过程作分别的介绍.
(1)被困人员身体处于竖直状态时,机械手的工作过程
当被困人员身体处于竖直状态时,使用夹持机构(一)实施救援,其救援过程如图16所示.

图16 工作流程图
(2)被困人员身体处于平躺状态时,机械手的工作过程
该种情况下,被困人员平躺时,使用夹持机构(二),机械手将被困人员抱住,再翻转,将被困人员身体由平躺状态调整为竖直状态,最后将被困人员拉出井.机械手的工作工程与第一种情况相似,在完成定位操作与调位操作后,夹持机构从被困人员的腋下部位进行合抱,将被困人员抱住,由于被困人员身体处于平躺状态,人的正常体态是竖直状态,机械手在将被困人员抱住之后,对夹持机构进行翻转,将被困人员的身体转成竖直状态,摇动救援三脚架上的手摇装置,将机械手拉出井,即可将被困人员成功安全地救出.
5 结 语
本文针对深井掉人事故中被困人员的不同被困形式,对机械手的定位机构、调位机构、夹持机构进行设计,该深井救援机械手相比传统的深井救援装置,具有结构简单、操作方便、效率高、成功率高等特点,能适应不同型号井与不同体型人的救援工作,为深井事故的救援提供方便,对减少深井掉人事故发生时的人员伤害具有重要的意义.
[1] 孙 恒.机械原理[M].7版.北京:高等教育出版社, 2006.
[2] 濮良贵,纪名刚.机械设计[M].8版.北京:高等教育出版社,2006.
[3] 袁爱霞,高中庸,李宝灵.机械原理与机构创新设计[J].高教论坛,2007(6):78-79.
[4] 张 屹,韩 俊,张 虎,等.突发灾害下的输电铁塔应急安全检测机器人的结构设计[J].三峡大学学报:自然科学版,2010,32(3):33-36.
[5] 张 屹,邵 威,高虹亮,等.高压输电线路除冰机器人的机构设计[J].三峡大学学报:自然科学版,2008,30 (6):69-72.
猜你喜欢
微特电机(2020年11期)2020-12-30
当代陕西(2020年24期)2020-02-01
山东煤炭科技(2019年12期)2019-12-27
制造技术与机床(2019年11期)2019-12-04
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
工业设计(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
当代化工研究(2016年6期)2016-03-20
深圳职业技术学院学报(2015年5期)2015-11-30
