
预冷水泵变频节能控制策略
2011-03-27 07:31于微波杜遵生
长春工业大学学报 2011年3期
于微波, 王 岩, 杜遵生
(长春工业大学电气与电子工程学院,吉林长春 130012)
0 引 言
预冷系统是空分设备的重要组成部分,位于空透与分子筛纯化器之间,用以降低压缩后气体的温度,保证空分设备后续工艺的顺利运行。另有对空气进行洗涤,初步清除杂质的作用。水泵电机作为冷却系统的主要设备,它的能耗问题一直备受关注。据统计,全国泵类电机耗电量约占全国电力消耗的20%。在传统的节流调节运行方式中,预冷水泵在工频下恒速运转,通过调节阀门挡板开度控制流量、压力等信号,但此时系统耗电量和输出功率并未减少,截流过程浪费了大量能源。由于预冷水泵轴功率与转速成立方关系,转速下降将大大降低轴功率,因此,可采用变频调速技术避免上述耗能问题,且能改善系统启动性能及运行特性。
1 预冷水泵运行的能耗分析
预冷系统利用预冷水泵输送冷却水来冷却压缩后的空气。输送水量的大小直接影响冷却效果,冷却水流量太大,造成能源浪费;流量太小,又达不到工艺要求。因此,预冷水泵的流量是控制的关键。预冷水泵传统的运行方式为节流调节,是指采用固定转速的电机驱动水泵主轴旋转,连续地将能量传递给冷却水,实现冷却水的输送。供水过程根据实际工况调节阀门挡板的开度,改变管阻特性曲线和工作点位置,得到目标冷却水流量,其特性曲线如图1所示。
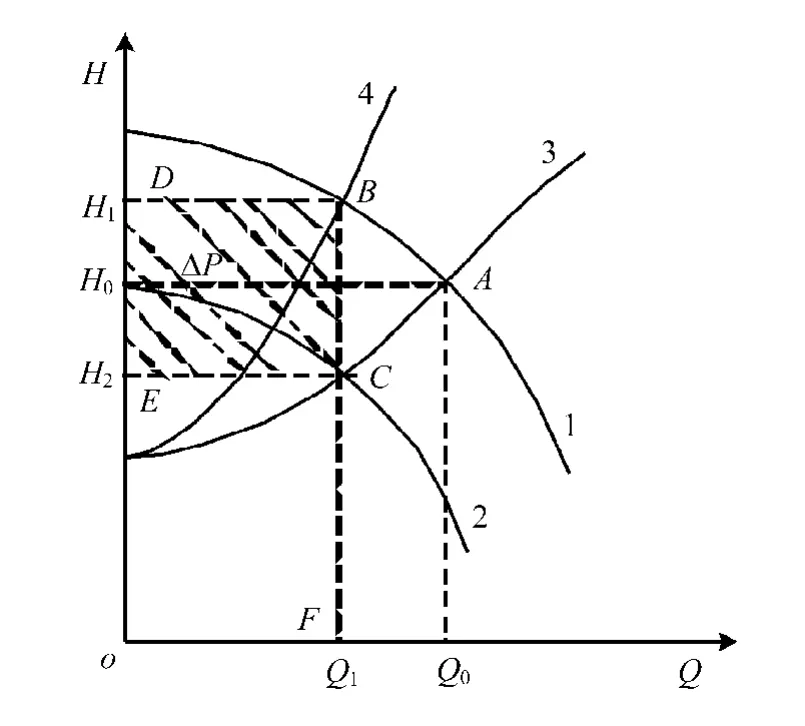
图1 预冷水泵特性曲线图
电机在额定转速下恒速运行,扬程特性曲线为曲线1,若使流量由Q0减小至Q1,通过减小阀门开度,增加管路阻力的方法,使管阻特性由曲线3移至曲线4的位置,相应的工作点由 A变为B点。此时,扬程从H0提高至H1,产生H1-H0段损失。若在阀门挡板全开的情况下,采用变频调速技术降低预冷水泵的转速,使其扬程特性曲线变为曲线2,它与管阻特性曲线3相交于工作点C,对应扬程为H2。通过比较,不关小阀门且满足流量需求的同时,采用变频调速技术比节流调节法节省H1-H2段扬程;若供水功率与水泵工作点-原点覆盖长方形面积成正比,则 Δ P(SOFBD-SOFCE)为变频调速控制方式节约的供水功率[1]。
预冷水泵效率曲线如图2所示。
图中,1,2分别为节流调节、变频调节时的效率曲线,当流量Q=QB时,两种方法对应的效率为ηB,ηA。这表明流量相同情况下,变频调节的效率更高,可使水泵效率处于最佳状态。
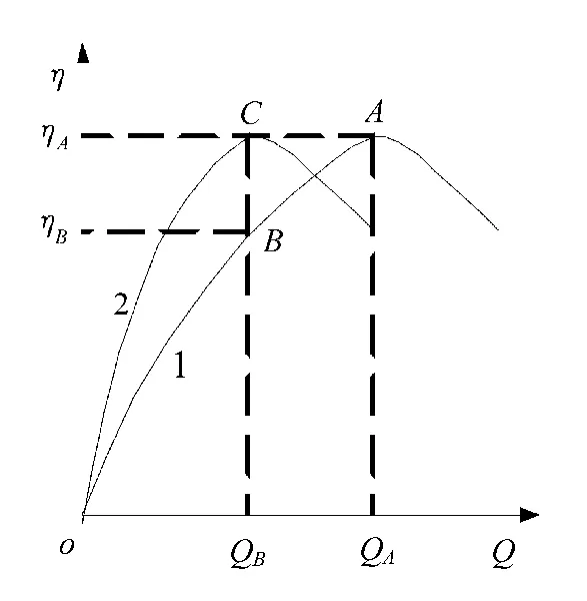
图2 水泵效率曲线
2 预冷水泵变频调速节能控制策略
2.1 预冷水泵变频调速节能的基本原理
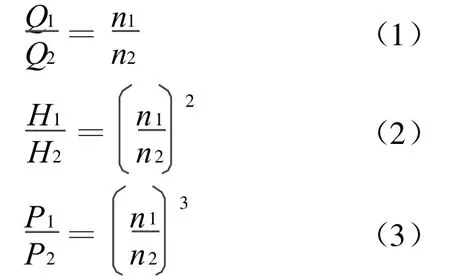
按照液体机械相似规律,预冷水泵流量与转速成正比,扬程与转速平方成正比,轴功率与转速立方成正比。通过调节预冷水泵的转速即可达到控制流量、扬程和轴功率的目的。流量Q、扬程H、轴功率P和转速n之间的关系为[2]:
预冷水泵电机变频调速技术是通过调节电机定子端输入电源的频率来改变电机驱动水泵主轴的旋转速度,使泵流量和扬程满足供水系统要求。水泵电机的转速公式为:

目前,预冷水泵电机常采用的变频调速控制方式为矢量控制。其基本思想是通过坐标变换把交流异步电动机在按转子磁链定向的同步旋转坐标系上等效成直流电动机,将定子电流分解为两个互相垂直的分量,实现磁通和转矩解耦[3]。基于产生同一旋转磁动势的准则,将水泵电机的定子三相电流通过3s/2s变换,得到两相静止坐标系下的交流电流iα和iβ,再由2s/2r变换,得到两相同步旋转坐标系下的直流电流id和iq:

若取d轴为沿转子总磁链 Ψr的方向称为M轴,再逆时针旋转90°就是T轴。即按转子磁链定向的旋转坐标系,此时 Ψrd=Ψrm=Ψr,Ψrq= Ψrt=0。则简化的电压方程矩阵为:

定子电流与转子磁链的关系为:

转矩方程:

式(7)表明,转子磁链 Ψr仅由定子电流励磁分量isd决定,与转矩分量isq无关。由式(8)可以看出,当 Ψr达到稳态且保持不变时,电磁转矩Te仅由定子电流转矩分量isq决定,实现了磁通和转矩的独立控制。
2.2 预冷水泵变频调速控制系统的设计
预冷水泵变频调速矢量控制系统主要由5个模块组成:转速控制器、矢量控制器、脉冲发生器、全桥逆变器和水泵电机[4]。其仿真模型如图3所示。
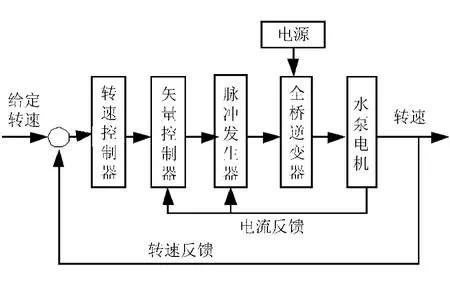
图3 预冷水泵矢量控制变频调速系统结构图
系统为双闭环结构,外环为转速控制环,内环为电流控制环。外环将给定转速与实测转速的误差送入转速控制器,输出转矩参考值。内环把经坐标变换得到的定子三相参考电流与实测的定子三相电流送入脉冲发生器,产生全桥逆变电路的控制脉冲,控制水泵电机运行[5]。
2.3 预冷水泵转速控制器的设计
预冷水泵电机具有非线性、强耦合且参数易发生变化的特点,采用常规PI控制器,难以保证在整个控制过程中系统始终具有最佳的控制性能。而模糊控制是基于规则的控制,具有不依赖于对象精确模型的特点。可将模糊控制和PI控制结合起来,构建二维模糊控制器,以误差e和误差变化率ec为输入,满足不同时刻的e和ec对PI参数自整定的要求。通过找出不同时刻转速误差、误差变化率(e,ec)和PI控制器的比例、积分修正系数(Δ Kp,ΔKi)之间的模糊关系,根据模糊推理方法对ΔKp,ΔKi在线整定,构成模糊PI控制器,其结构框图[6]如图4所示。
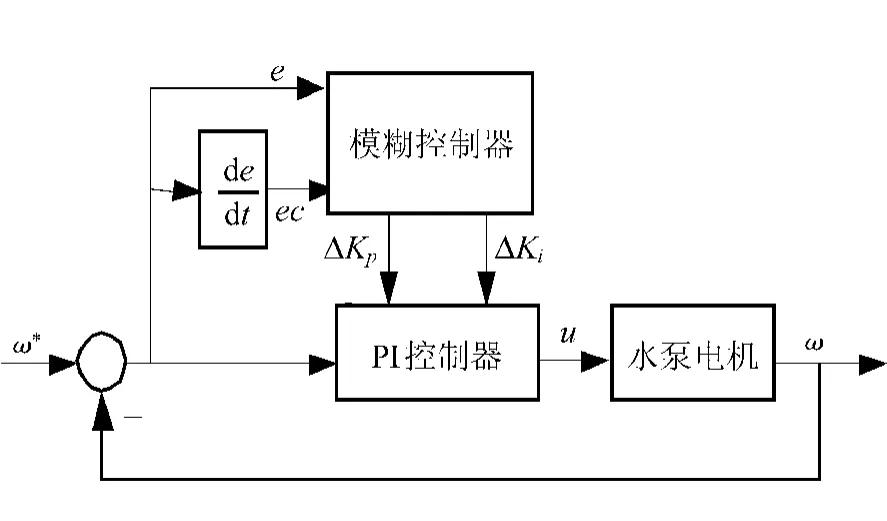
图4 模糊PI控制器结构框图
从系统稳定性、响应速度、稳态精度和超调量等方面考虑,控制过程对参数自整定要求如下:
当偏差|e|较大时,为加快系统响应速度,Kp应取较大值,为避免系统响应出现较大的超调,Ki取值为零。
当|e|和|ec|为中等大小时,为降低系统超调,Kp应取较小值,Ki取值要适中,以保证系统的响应速度。
当|e|较小时,为使系统具有良好的稳态性能,应增加Kp和Ki的取值[7]。
选取输入输出变量的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},分别代表{负大,负中,负小,零,正小,正中,正大},且论域均为[-6,6],隶属度函数为三角分布。
总结工程设计人员技术知识和实际操作经验,可建立Δ Kp,ΔKi和e,ec之间的模糊规则表,这是模糊控制的核心内容[8],模糊规则表见表1。
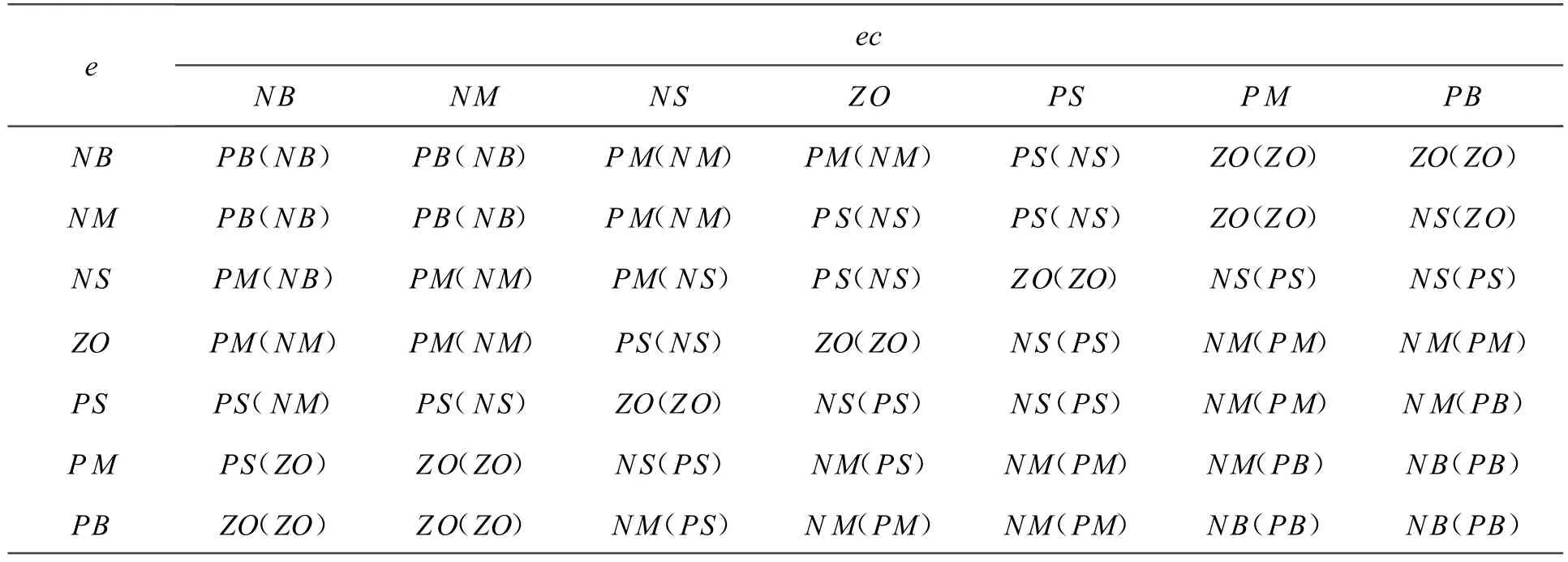
表1 模糊规则表ΔKp(ΔKi)
在隶属度函数及模糊规则确定的基础上,加入量化因子及比例因子,便可建立符合要求的模糊PI控制器。
3 仿真实验及结果分析
根据上述对预冷水泵矢量控制变频调速系统的分析及模糊速度控制器的设计,在 Matlab/ simulink软件下对系统进行仿真。利用readfis命令完成模糊工具箱与simulink的连接,建立仿真模型,如图5所示。
其中模糊PI速度控制器的内部结构如图6所示。
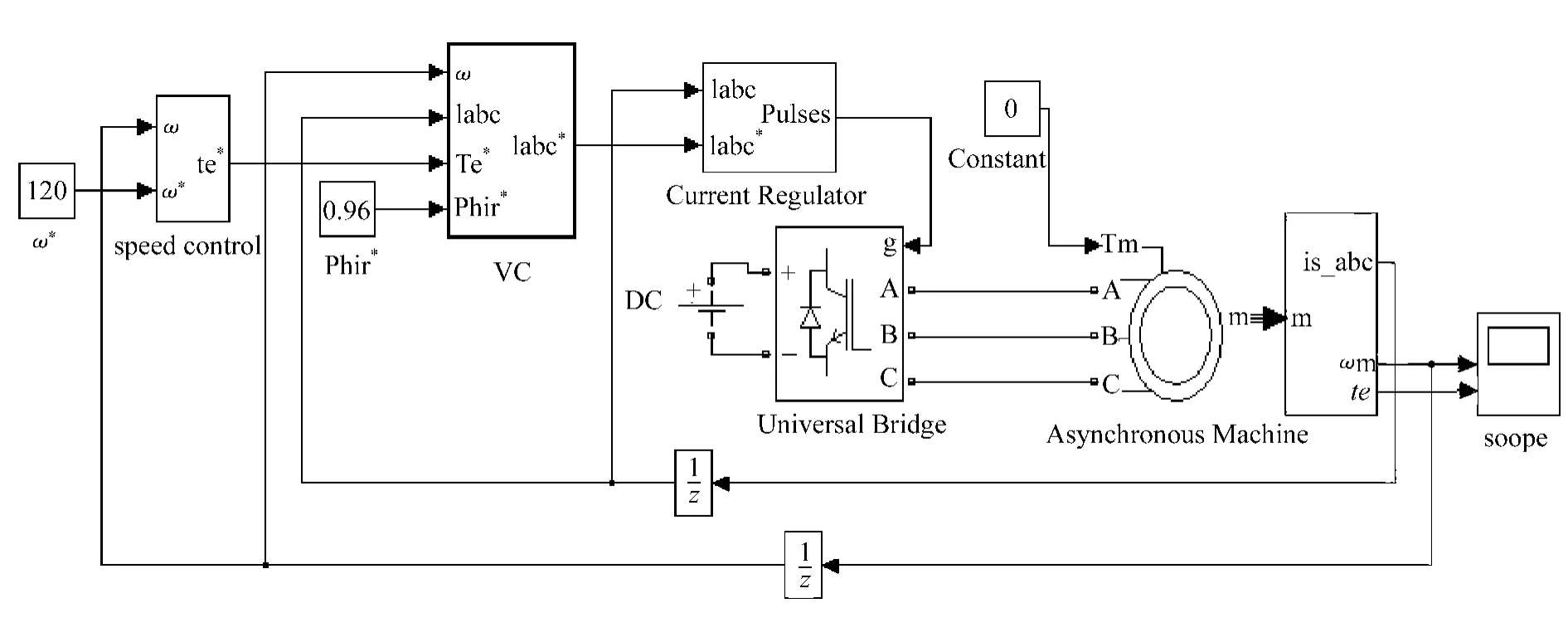
图5 预冷水泵电机矢量控制变频调速系统仿真模型
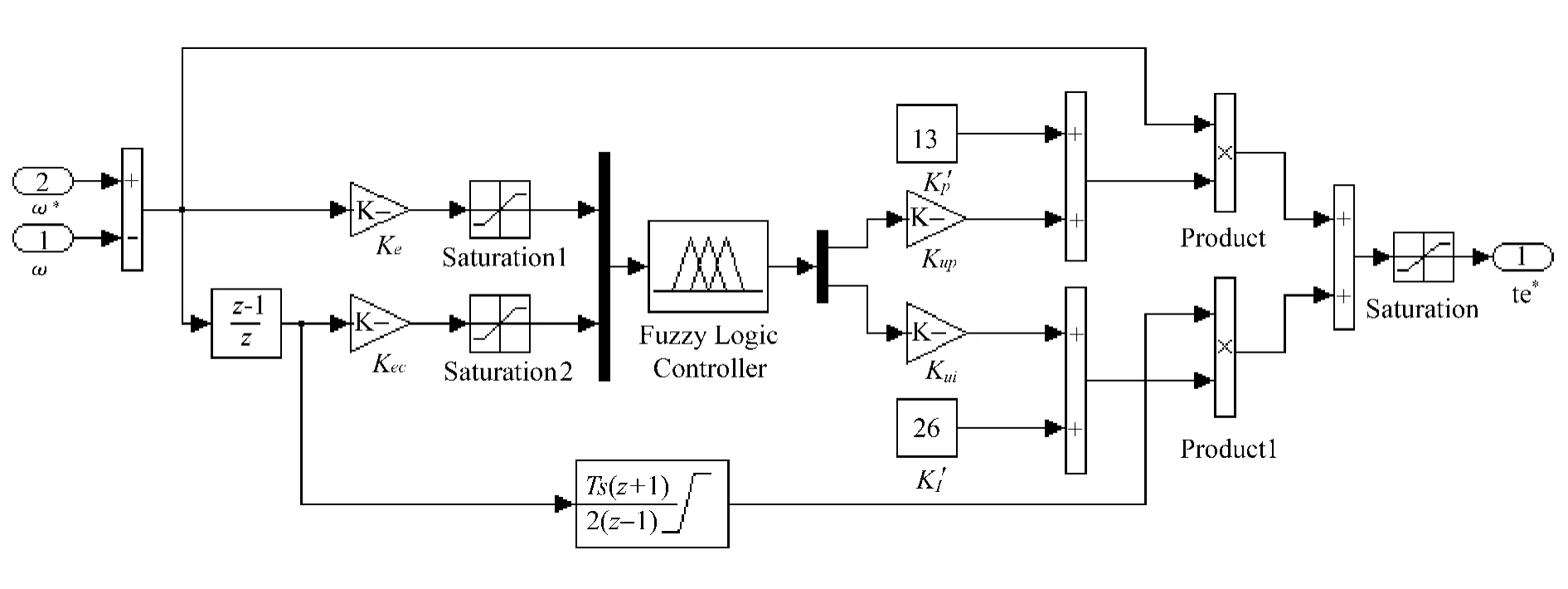
图6 模糊PI速度控制器内部结构图
为验证仿真模型的正确性与有效性,给出异步电机仿真模型参数如下:额定电压380 V,额定频率50 Hz,R1=0.087 Ω,R2=0.228 Ω,L1= 0.000 8 H,L2=0.000 8 H,Lm=0.034 7 H,转动惯量J=0.862,极对数=2,给定转速ω= 120 rad/s。采用ode23tb仿真算法,运行上述仿真模型,可得到水泵电机转速、电磁转矩仿真曲线如图7所示。
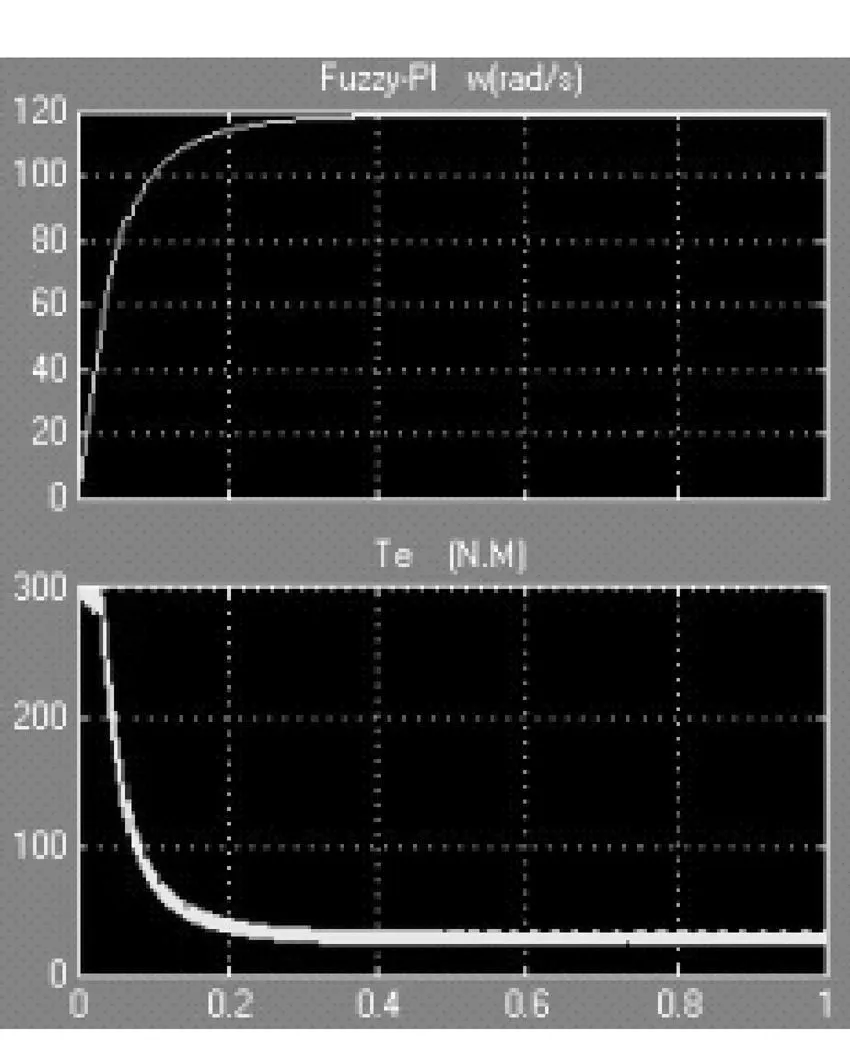
图7 水泵电机转速、电磁转矩仿真曲线
实验结果表明,空载运行时,预冷水泵电机的转速和电磁转矩都能够瞬时响应,较快地跟踪设定值,并在0.4 s时达到稳态,说明系统的动态响应较快。波形变化曲线符合理论分析,系统能够平稳运行,验证了水泵电机矢量控制变频调速模型的可行性和有效性。因此,所建模型可以满足预冷系统的供水要求,为预冷系统的控制提供了理论依据。
4 结 语
变频调速技术在预冷系统中的应用具有长远的经济和社会效益,是一项很好的节能措施。对于水泵采用变频调速,可使生产节约电能20%~50%,一年半内即可收回调速控制所增加的成本。
[1] 李志忠.预冷水泵电机变频调速节能改造初探[J].深冷技术,2006,2(1):44-46.
[2] 高相铭.变频调速技术在水泵节能中的应用[J].机械工程与自动化,2007,144(5):170-174.
[3] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[4] 潘晓晟,郝世勇.M atlab电机仿真精华50例[M].北京:电子工业出版社,2007.
[5] 胡乃平,马海菊,王红.基于Matlab的感应电机驱动系统建模与仿真[J].机械工程与自动化,2008,149(4):13-18.
[6] 李国勇.智能控制及其Matlab实现[M].北京:电子工业出版社,2005.
[7] 曹海波,方建安,刘洪玮.基于模糊PID的交流电动机矢量控制系统[J].微特电机,2010(1):64-70.
[8] 刘金琨.先进PID控制Matlab仿真[M].北京:电子工业出版社,2004.
猜你喜欢
煤气与热力(2022年4期)2022-05-23
排灌机械工程学报(2021年11期)2021-12-06
煤气与热力(2021年7期)2021-08-23
水泵技术(2021年3期)2021-08-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
中国食用菌(2018年5期)2018-09-22
电子制作(2017年7期)2017-06-05
治淮(2015年8期)2015-12-26
中国果菜(2015年8期)2015-12-10
